
用于电力线巡检的大型无人直升机多传感器系统集成设计
2016-04-11 03:33王柯蔡艳辉彭向阳刘正军麦晓明张金铎
广东电力 2016年2期
王柯,蔡艳辉,彭向阳,刘正军,麦晓明,张金铎
(1.广东电网有限责任公司电力科学研究院,广东 广州 510080;2.中国测绘科学研究院,北京 100830)
用于电力线巡检的大型无人直升机多传感器系统集成设计
王柯1,蔡艳辉2,彭向阳1,刘正军2,麦晓明1,张金铎2
(1.广东电网有限责任公司电力科学研究院,广东 广州 510080;2.中国测绘科学研究院,北京 100830)
摘要:基于电力线路安全巡检需要,设计了集可见光相机、红外热像仪、紫外成像仪、激光扫描仪和定位定姿系统等设备为一体的无人直升机多传感器系统。提出了基于全球定位系统时间系统的高精度后处理软同步方法,实现各个传感器系统的独立、协调同步工作。同时提出基于服务器-客户端软件架构,实现各个传感器控制和数据采集的相互独立,最大限度提高传感器系统工作的安全性和可靠性。多传感器集成的无人机巡检试验结果显示,该系统能够在单次飞行中同步获取多波段、多种类型的巡检数据,数据之间具有强相关性,可以用于多源数据联合诊断分析,满足电力线路安全隐患多要素自动诊断的需要。
关键词:大型无人直升机;可见光相机;激光扫描仪;红外热像仪;紫外成像仪
传统输电线路人工巡检工作量大、条件艰苦, 特别是在大面积水域、山区和大跨越等复杂地形下的巡检工作存在很大困难,越来越不适应电力运行管理现代化建设的需要。采用直升机、无人机进行巡检能有效克服上述不足,欧美各国在20世纪50年代开始研究并使用直升机完成巡线、带电作业和线路施工[1-2],我国在20世纪80年代也开始研究利用直升机巡线的技术[3-8]。由于直升机应用成本高、投资大,同时也存在一定的作业风险,现在国内拥有直升机实用化电力作业能力的单位为数不多。
近年来英国、德国、澳大利亚、西班牙和日本先后开展了固定翼无人机、无人直升机电力巡检的相关技术研究,由于各种原因,主要还是处于实验室水平,并未广泛应用于实际生产中。我国在无人飞机巡线方面也进行了较为广泛的研究并取得了长足的进步[9-13],在近年来涌现了大量的无人机研制单位,对社会开展销售、租赁航拍服务等业务。
无人直升机电力巡检关键技术问题就是在保证飞行安全的前提条件下,实现最有效的传感器载荷集成,以便能达到准确、快速地发现电力线路故障、缺陷和隐患的目的。受以往无人机有效载荷小的限制,目前市面常见的传感器集成方式多为长短焦可见光相机、摄像机以及红外热像仪的组合,进行无人机的半自动、全自动飞行及传感器的定时定点自动、手动拍摄。这种集成方式虽然拓展了巡检人员的视野,但随之产生的海量弱相关数据处理极大地增加了后期工作量,增大了无人机巡检作业的应用难度。
提高传感器集成的有效性,一方面需要拓展传感器种类,另一方面需要有效组织传感器集成方式以产生有序的巡检数据,前者随着无人机技术的发展和大载荷机型逐步进入民用市场,已为多传感器集成应用提供了必要条件,而后者目前仍然鲜见可参考的研究成果。本文通过对电力线路安全巡检的需求分析,提出了一种将多种传感器用于电力线路巡检的集成方案,针对无人直升机飞行平台进行多传感器集成设计和研发,并基于此开展了大量的现场试验,验证了该集成方案的有效性。
1无人机电力线路巡检需求
在无人机巡检工作中,希望通过传感器合理配置,在一次飞行中发现尽可能多的故障、缺陷和隐患,提高巡检工作效率,降低飞行风险。同时,传感器数据间应具有较强的空间和时间关联性,便于数据的同步展示和联合冗余分析,提高巡检质量。
与人工巡检不同,无人机系统巡检时不便或不可能实现直接人工干预,对问题的判断多依赖于后期数据处理分析,从而对传感器的功能、性能和集成提出了较高要求。根据电力线路故障、缺陷和隐患的类型,可以明确传感器选择需求;根据传感器配置、安装以及无人机平台的载荷限制,可以明确传感器集成需求。
1.1传感器选择需求
目前市面上可选的传感器种类主要有以下5类:
a)可见光检测设备。采用可见光波段的成像传感器对导地线、杆塔、金具、绝缘子等部件的外形、大小、颜色、完整性,以及线路走廊内的树木生长、地理环境、交叉跨越等情况进行记录,代替人眼进行工作,必要时可进行全程跟踪录像[8]。可见光设备主要包括高清数码相机、高清摄像机等,并配以多种规格的可见光镜头。
b)红外检测设备。采用红外热像仪等成像型测温设备对电力线路导线、金具、绝缘子等进行红外成像和温度反演,通过热辐射的分布特征分析数据,并判断温度是否在正常范围,必要时进行全程红外跟踪录像[14]。红外设备主要包括制冷型和非制冷型测温设备,并配以多种规格的红外镜头。
c)紫外检测设备。通过特殊的滤镜,使仪器检测波长在240~280 nm之间的光信号,以排除太阳光的干扰,实现全天候导地线、金具和绝缘子串异常放电检测,再通过与可见光、红外检测结果对比,综合分析确定异常放电的原因[15-16]。紫外检测设备通常具备放电强度计量功能,并与可见光摄像机进行视场配准,实现双光谱显示。
d)空间扫描设备。空间扫描设备通过扫描电力线路及其覆盖区域的地物地貌,构建线路设备与走廊的三维空间关系,用于重建线路走廊三维模型和空间量测。空间量测可以测定输电线路与周边物体的安全距离,分析电力线走廊地表变化和树木生长速度[17-18]。常用的设备有激光扫描仪和立体相机等。
e)定位定姿系统(position and orientation system,POS)。POS是全球导航卫星系统(global navigation satellite system,GNSS)接收机与惯性组合导航系统,可以为各传感器提供实时的高精度位置和姿态数据,实现整体的空间分析。使用空间扫描设备时需要该系统。
1.2传感器集成需求
多传感器集成需求主要包含以下5个方面:
a)时钟同步。为保证传感器获取数据能够有效统一在同一时间坐标下,传感器集成时需采用时钟同步技术,为所有传感器数据标记统一的时间戳。
b)集成安装。为保证传感器获取数据能够有效统一在同一空间坐标下,集成时应保证各传感器视轴方向一致,安装框架应有足够的刚度,以保证在振动条件下各传感器的视轴变化在容许的范围内。
c)视轴稳定。在飞行中,考虑到无人机飞行姿态变化、振动、侧风等因素影响,集成传感器必须安置在稳定平台上,实现振动及干扰力矩隔离,保证传感器视轴稳定、拍摄图像清晰。
d)体积重量限制。目前民用无人机系统规格和载重水平有限,集成多种传感器时应充分考虑吊舱控制性能和重量体积的折中。视轴稳定性要求越高,所需的机械结构越复杂,能够集成的传感器也越有限。对于电力巡检工作,控制精度不是首要考虑的因素,因此在集成设计时可适当向功能方向倾斜。

PCI—外设部件互联标准,Peripheral Component Interconnect的缩写;PPS—输出秒脉冲,pulse per second的缩写。图3 多传感器集成系统构成
e)自动跟踪。自动化巡检需要传感器吊舱具备自动跟踪的能力,以减少人工操作工作强度,提高巡检数据获取质量。目前军事吊舱用的图像识别跟踪算法对输电设备识别跟踪效果不理想,在集成设计时可不考虑安装图像识别设备,而是利用空间坐标计算等方式,从上层控制实现吊舱的自动跟踪。
2无人机多传感器巡检系统设计
2.1无人机电力巡检系统构成
目前比较主流的巡检系统主要由无人机平台、传感器吊舱系统、无线通信系统和地面控制系统等部分组成[19],各系统之间的相互关系如图1所示,实线箭头为无人机控制信号通道,虚线箭头为吊舱系统控制信号通道。

图1 无人机电力线路巡检系统
无人机平台主要实现按计划自动飞行以及运载吊舱系统两大任务[20-22];通信链路实现控制数据、状态信息以及实时图像的传输,提供地面控制系统与无人机平台、吊舱系统的远程交互控制;地面控制系统完成控制指令发送、无人机平台和吊舱系统的运行状态参数接收、实时图像集中显示等[18]。
目前国内无人机巡检系统的有效载荷水平以及通信链路的稳定性为多传感器集成设计及功能实现奠定了基础。民用无人直升机的有效载荷已经超过20 kg,这是开展多传感器集成的必要条件[10]。多传感器集成的功能实现受航线跟踪精度和定位精度影响较大,无人机的位置信息主要依靠全球定位系统(global positioning system,GPS)、北斗定位系统等获得,必要时还可通过地面发送实时GPS差分信号提高无人机的GPS定位精度,目前通信链路带宽和延迟特性能够满足差分信号准确传输的需要,为多传感器集成应用提供了充分条件。
2.2多传感器吊舱集成设计
2.2.1传感器选择
本文研究中选用了目前国内民用最大规格的无人直升机之一,有效任务载荷50~80 kg,吊舱挂载点允许的最大质量45 kg,挂载点离地47.5 cm。为最大化该款无人机有效载荷的利用率,根据巡检任务的需求,选择传感器如下:高清数码相机2台(长焦和短焦)、三维激光扫描仪1台、红外热像仪1台、紫外成像仪1台、POS 1台。此外,设计集成框架、系统时钟卡、双轴双框架稳定平台等部件,装配成1个多传感器集成系统,具体配置见表1。通过这种配置方式,吊舱系统在一次飞行中可以完成包括线行环境观测、杆塔设备拍照、异常发热和放电监测、通道安全距离测算以及输电线路三维建模等多项任务,有效减少大型无人机起飞前后用于准备和撤收工作的边际时间成本,提高巡检工作效率。
表1传感器及其他设备配置参数
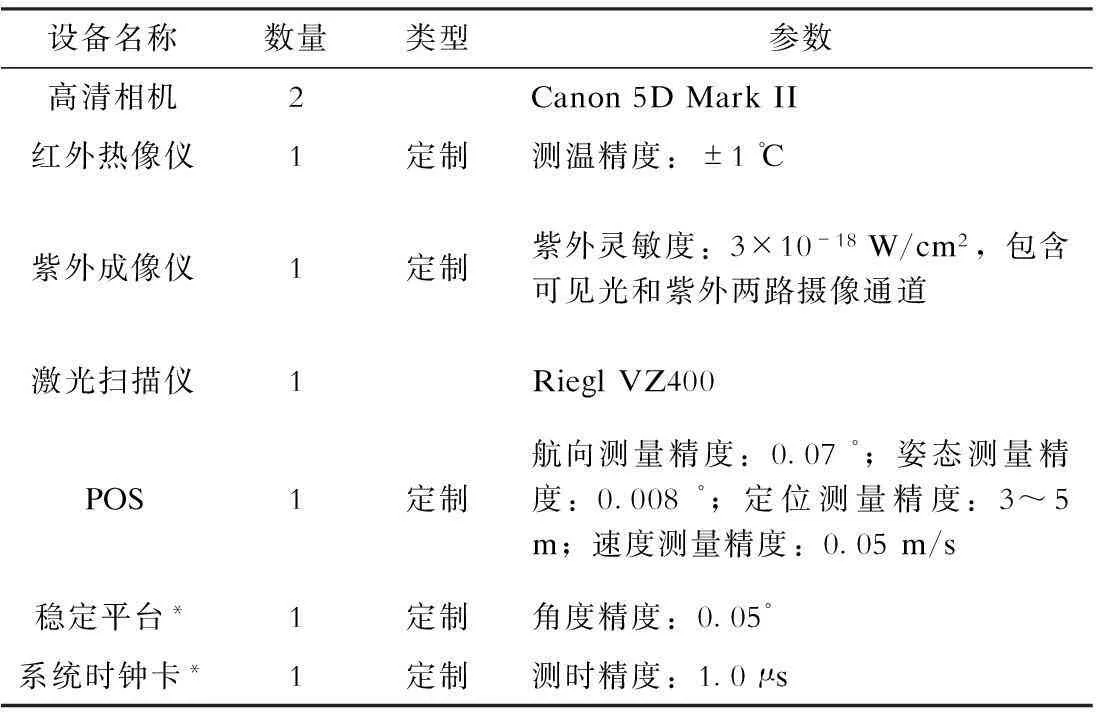
设备名称数量类型参数高清相机2Canon5DMarkII红外热像仪1定制测温精度:±1℃紫外成像仪1定制紫外灵敏度:3×10-18W/cm2,包含可见光和紫外两路摄像通道激光扫描仪1RieglVZ400POS1定制航向测量精度:0.07°;姿态测量精度:0.008°;定位测量精度:3~5m;速度测量精度:0.05m/s稳定平台*1定制角度精度:0.05°系统时钟卡*1定制测时精度:1.0μs
注:*标识的设备不属于本文所述传感器。
2.2.2集成框架设计
上节所选传感器各自具有独特外形和尺寸,其外壳具备防护特性和安装结构,不便拆除外壳进行集成,设计中尽量利用传感器本身的安装结构,将各传感器尽量平衡配置安装在集成框架中,消除传感器自身质量分布不均带来的影响。吊舱系统仅作低速转动,设计和装配时仅考虑静态平衡性能。
无人机载荷的质量和安装空间有限,集成框架需具有结构紧凑、强度刚度高、质量轻的特点。设计中采用整块金属加工形成多块主体骨架,通过拼装形成框架,加强结构局部的刚度和强度;大量使用加强筋和镂空结构,在保证刚度强度的前提下尽可能减轻框架质量。
传感器布置以质量和体积最大的激光扫描仪为中心,考虑到吊舱安装位置离地高度不足的情况,在其两侧均衡地布置其他设备,集成框架的组装完成图如图2(a)所示,各传感器的安装如图2(b)所示。集成框架通过两侧的安装法兰和穿线孔与外部的稳定平台连接,外覆碳纤板材,起到防尘和电气屏蔽的作用。

(b)传感器安装

(b)传感器安装1—长焦高清相机;2—短焦高清相机;3—红外热像仪;4—紫外成像仪;5—激光扫描仪;6—POS的惯性测量单元。图2 集成框架结构及传感器安装
2.2.3多传感器集成系统功能设计
多传感器集成系统以工业控制计算机(内置图像采集卡)和系统时钟卡为核心进行集成设计,系统数据连接构成方式如图3所示。
工业控制计算机既用作控制吊舱的计算平台,接收转发来自通信链路机载端发出的控制指令,又用作视频采集保存的存储平台,采集和保存紫外成像仪输出的逐行倒相(phase aternating line,PAL)格式模拟视频信号以及红外热像仪输出的数字视频信号。
系统时钟卡是多传感器集成的核心部件之一,为全部传感器提供统一的时间基准并完成时间测量。虽然各传感器都维持自有的时间系统,但由于存在初始值差异、漂移和频偏,多传感器间难以利用自有时间系统实现同步功能。本文通过准确测量各传感器工作时发出的外部触发脉冲,完成传感器数据的软同步。
系统时钟卡的总体实施策略如下:
a)通过GPS信号维持1个GPS绝对时间;
b)通过PPS信号和NMEA(National Marine Electronics Association)协议的语句实现GPS绝对时间的传递;
c)根据GPS绝对时间,利用系统时钟卡自身的时钟和芯片逻辑构成一个GPS绝对时间测量系统,测量外部脉冲的发生时刻。
该时钟卡的工作机制如图4所示。激光扫描仪仅使用系统时钟卡输出的PPS信号和NMEA协议的语句,直接与GPS信号进行时间同步,故不在上述时间测量和软同步机制范围内。

GPIO—通用输入输出接口,general purpose input output的缩写。图4 多传感器时钟同步工作机制
吊舱系统工作时,将外部传感器的工作触发脉冲信号连接到系统时钟卡,用时钟卡本地高精度GPS绝对时间测量系统实时检测外部传感器触发脉冲,测量工作触发脉冲上沿或下沿达到时刻,完成各个传感器设备相关操作的时间测量,并将测量数据实时输出记录。在时间测量的基础上,根据POS的位置、姿态、稳定平台角度、飞机相对运动速度计算各个传感器工作触发脉冲对应时刻的传感器空间位置姿态,通过运动时间补偿完成各个传感器数据的时空软同步。
3无人机多传感器集成
3.1硬件集成
多传感器硬件集成主要包括系统时钟卡研发、多传感器及设备接口控制等内容。因工业控制计算机串口数量不足,另配置了串口扩展卡。分部件集成调试完成后按设计进行多传感器吊舱装配。
3.1.1系统时钟卡
该时钟卡基于嵌入式ARM STM32-CortexM3处理器开发,其系统主频72 MHz,时钟周期14 ns。由于STM32103F维持一个独立于系统的时钟,该时钟可以直接用于系统时间测量,可支持5路时钟信号的高精度时间测量。时钟卡采用GPS接收机提供的PPS时钟同步本地时钟,再通过本地时钟完成各个传感器的时间测量。系统时钟卡的实物外观如图5所示。

图5 系统时钟卡
3.1.2传感器及其他设备接口
各传感器和设备的软硬件控制、数据输出以及外部触发脉冲信号的接口有较大差别,见表2。其中使用RJ45网口以及通用串行总线(universal serial bus,USB)接口的设备可直接连接至工业控制计算机,使用串口的设备通过串口扩展板与工业控制计算机连接,外部触发脉冲直接连接至系统时钟卡,不在工业控制计算机中转。
3.1.2.1各传感器外部触发脉冲信号的选择
a)由于对焦及曝光延迟,高清相机的实际曝光时刻通常晚于用户控制命令发出时刻,故使用相机外部曝光同步信号作为外部触发脉冲以提高测试准确性。
b)红外热像仪及紫外成像仪均为视频提供了帧同步信号,本文使用该信号作为外部触发脉冲对每一帧图像提供测时和软同步。
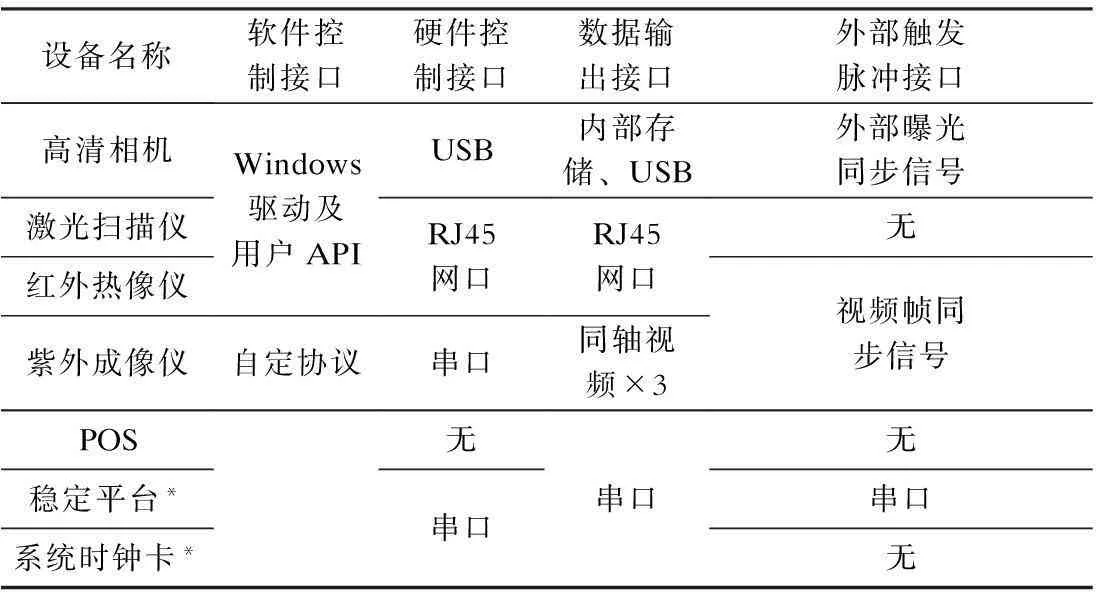
表2 传感器及其他设备接口参数
注:*标识的设备不属于本文所述传感器;API—应用程序接口,application programming interface的缩写。
c)激光传感器直接使用系统时钟卡转发的GPS时间信息,无需外部触发信号。
3.1.2.2各传感器数据输出的形式
a)高清相机的数据输出可用两种方式:本地存储、通过USB口在工业控制计算机上保存。因相片数据量大(通常为10 MB以上)、曝光间隔短,通过USB口传输的稳定性较差,因此首选内部存储,巡检后再通过USB口输出。
b)红外热像仪同时提供数字和模拟两路视频,其中数字视频用作事后智能诊断测温用,直接通过RJ45网口保存在工业控制计算机上;模拟视频用作实时监控,通过无人机通信链路实时回传。
c)紫外成像仪提供3路视频信号(可见光、紫外放电光斑以及叠加视频),其中可见光和紫外放电光斑视频用于事后放电分析,通过视频采集卡保存至工业控制计算机;叠加视频用作实时监控,通过无人机通信链路实时回传。
d)激光扫描仪数据通过RJ45网口直接保存在工业控制计算机上。
由于所选无人直升机的视频链路仅支持一路视频输入,因此为了在地面对所有机载视频进行监控,增加了一块视频分配及选通电路,工业控制计算机通过系统时钟卡转发串口控制指令,实现2路回传视频的切换。
3.1.3串口扩展卡
从表2可知,POS、稳定平台、紫外成像仪、系统时钟卡等的硬件输入输出以及无人机的通信链路设备大多都使用RS232或者RS422接口,因此在多传感器集成系统中配置了一块标准串口扩展卡,将工业控制计算机的一个USB口扩展成4个可配置的标准串口,满足集成需要。
3.1.4多传感器吊舱装配
按2.2节所述的集成框架设计方法,加工装配得到多传感器吊舱,装载于无人机后的外观如图6所示。

图6 完成装配的多传感器吊舱软件集成
3.2软件集成
系统软件集成基于Windows多任务系统,采用多进程、多线程编程相结合的方式实现机载主控程序、高清相机、红外热像仪、激光扫描仪、紫外成像仪、稳定平台、POS的控制和协同工作。多传感器控制软件系统采用了服务器-客户端程序架构,如图7所示。通过一个系统控制主服务器程序实现远程控制命令的接收和分发,各传感器的工作分别采用各自的客户端程序运行,通过Socket完成与主服务器程序的命令交换。系统根据电力巡线任务规划系统生成的任务文件及当前飞机所处的位置、吊舱姿态对稳定平台和各传感器进行动态调度,始终使传感器对准杆塔、导线方向并进行拍摄和摄像。各传感器获取的数据快速存储在机载控制计算机的可拆卸固态硬盘中,供后期处理和分析使用。

图7 传感器控制软件框架
4巡检应用及展望
该多传感器集成系统在无人机整机调试完成后,在广东地区已经开展了10余条线路共计超过200 km的实际线路巡检试验。飞行过程中多传感器吊舱和集成系统工作状态良好,通过可见光检测、红外检测、激光扫描仪等传感器发现了大量缺陷、隐患。应用该多传感器吊舱对清远市某条220 kV线路开展无人机巡检工作(如图8所示),实际拍摄到的部分线路缺陷如图9所示。

图8 实际线路无人机巡检试验
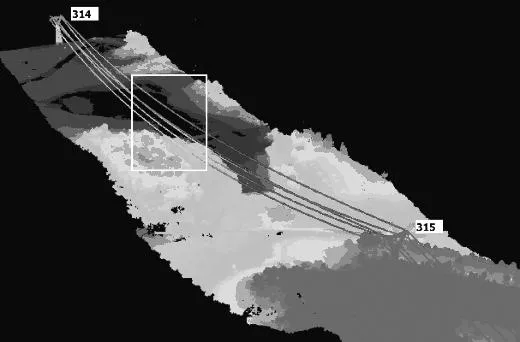
(a)某处树障缺陷的激光点云数据
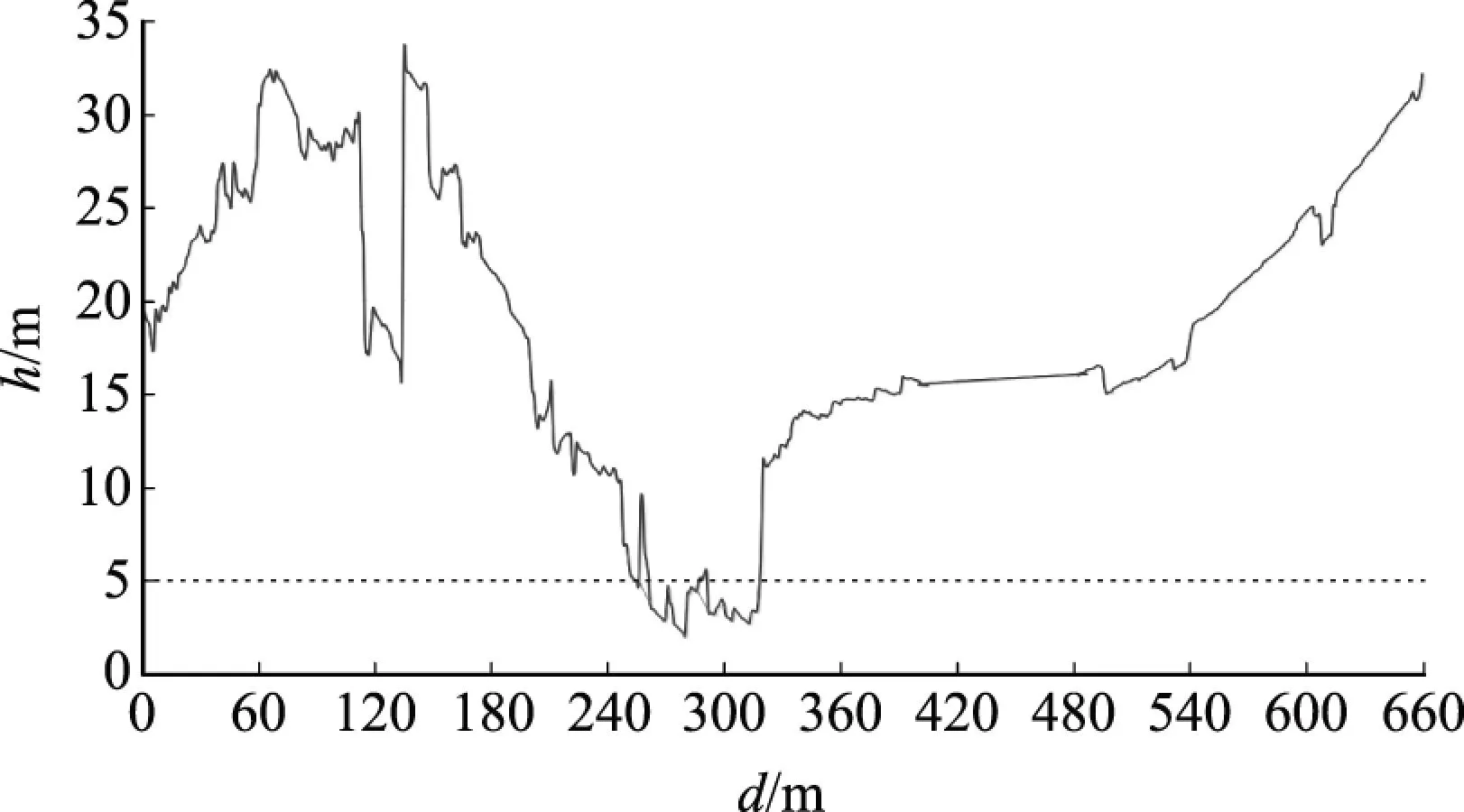
d为缺陷相导线上某点距315号塔的水平距离,d=0 m处为315号塔,d=660 m处为314号塔;h为缺陷相导线上某点距下地物垂直距离,h最小值为2.13 m,该处距离315号塔约280 m。(b)图(a)中缺陷导线对地物距离曲线(虚线为智能诊断预警值)
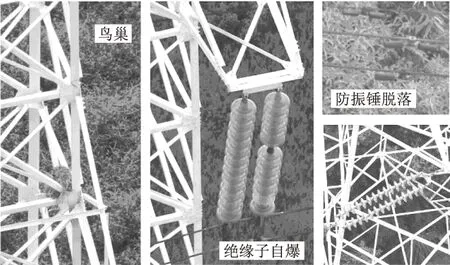
(c)可见光检测缺陷(鸟巢、绝缘子自爆、防振锤缺失等)
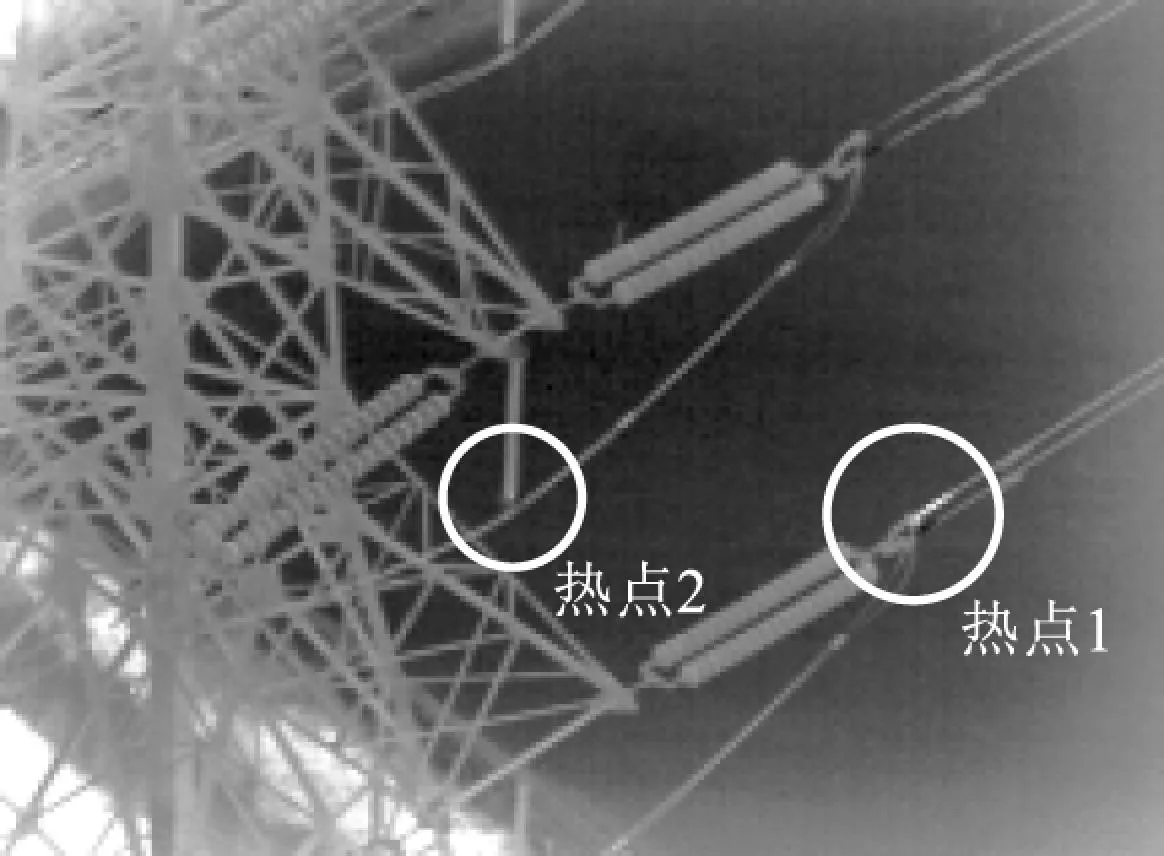
(d)线路设备发热现象(热点1为线夹,温升约4 K;热点2为跳线复合绝缘子护套高压端,温升约2 K)图9 实际线路无人机巡检试验发现缺陷
利用多传感器集成技术,获得的数据可以按照严格的时间和空间坐标进行组织,图10是多传感器数据同步浏览界面,可以看出多幅图像的数据具有良好的一致性。通过该技术的应用,用户可以方便地同步浏览多个传感器数据,并能对同一缺陷进行多源数据联合分析,提高缺陷判断的准确性。

(a)高清相机

(b)紫外成像仪紫外通道
(c)红外热像仪

(d)紫外成像仪可见光通道图10 多传感器数据同步浏览
受目前的传感器技术水平限制,本文开展的多传感器集成和设计研究存在吊舱质量偏大、外形的空气动力学性能不足等问题,所能集成的传感器种类和数量也接近极限。随着技术的快速发展,传感器向着轻小化方向不断改进,有望在更小的空间集成更多更先进的传感器,进一步提高无人机巡检工作的先进性和智能化水平。
5结论
a)基于电力线路安全巡检需要,为全面检测线路设备的故障缺陷情况,需要综合使用可见光检测、红外检测、紫外检测、激光扫描仪等多种传感器。
b)利用系统时钟卡和外部触发信号,可以实现绝对时间信息的准确测量,使得传感器数据能够按照时间和空间进行软同步,是多传感器集成的核心方法。
c)不同的商业传感器软硬件接口具有很大的差异。以工业控制计算机为核心,能够灵活实现多种传感器的有效控制,完成多传感器的软硬件集成。
d)多传感器集成的吊舱系统能够在一次飞行中获得多种类型的检测数据,数据之间具有很强的空间、时间关联性,不但可以实现多传感器数据同步浏览,还能对单一缺陷进行多源数据联合分析,提高缺陷判断的准确性。
参考文献:
[1] ITUEN I,SOHN G,JENKINS A. A Case Study:Workflow Analysis of Powerline Systems for Risk Management[J]. International Archives of Photogrammetry and Remote Sensing,2008,37(B3b):331-336.
[2] WILLIAMS M,JONES D I,EARP G K. Obstacle Avoidance During Aerial Inspection of Power Lines[J]. Aircraft Engineering and Aerospace Technology,2001,73(5):472-479.
[3] 于德明,武艺,陈方东,等. 直升机在特高压交流输电线路巡视中的应用[J]. 电网技术,2010(2):29-32.
YU Deming,WU Yi,CHEN Fangdong,et al. Application of Helicopter Patrol Technology in UHV AC Transmission Line[J]. Power System Technology,2010(2):29-32.
[4] 于德明,沈建,汪骏,等. 直升机在电网运行维护中的研究与应用[J]. 电网技术,2009(6):107-112.
YU Deming,SHEN Jian,WANG Jun,et al. Research and Application of Helicopter in Patrol and Hotline Operation Maintenance of Power Lines [J]. Power System Technology,2009(6):107-112.
[5] 张柯,李海峰,王伟. 浅议直升机作业在我国特高压电网中的应用[J]. 高电压技术,2006,32(6):45-55.
ZHANG Ke,LI Haifeng,WANG Wei. Analysis of Helicopter Patrol Application Prospect in China's UHV Grid[J]. High Voltage Engineering,2006,32(6):45-55.
[6] 邵允临,曹晋恩,尚大伟,等. 直升机巡检华北电网超高压输电线路[J]. 中国电力,2003,36(7):35-38.
SHAO Yunlin,CAO Jinen,SHANG Dawei,et al. Patrol Inspection of EHV Electric Power Transmission Line with Helicopter in North China Power Network[J]. Electric Power,2003,36(7):35-38.
[7] 赵鹏,邓春,袁亦超,等.应用直升飞机巡检输电线路[J]. 华北电力技术,2002(10):1-3.
ZHAO Peng, DENG Chun, YUAN Yichao, et al. Patrol of Transmission Line with Helicopter[J]. North China Electric Power,2002(10):1-3.
[8] 仝卫国,苑津莎,李宝树. 图像处理技术在直升机巡检输电线路中的应用综述[J]. 电网技术,2010(12):204-208.
TONG Weiguo,YUAN Jinsha,LI Baoshu. Application of Image Processing in Patrol Inspection of Overhead Transmission Line by Helicopter[J]. Power System Technology,2010(12):204-208.
[9] 张文峰,彭向阳,钟清,等. 基于遥感的电力线路安全巡检技术现状及展望[J]. 广东电力,2014(2):1-6.
ZHANG Wenfeng,PENG Xiangyang,ZHONG Qing,et al. Status Quo and Expectation of Safety Inspection Technology for Electric Power Lines Based on Remote Sensing[J]. Guangdong Electric Power,2014(2):1-6.
[10] 王柯,彭向阳,陈锐民,等. 无人机电力线路巡视平台选型[J]. 电力科学与工程,2014(6):46-53.
WANG Ke,PENG Xiangyang,CHEN Ruimin,et al. Unmanned Aerial Vehicle Platform Selection for Overhead Transmission Line Inspection[J]. Electric Power Science and Engineering,2014(6):46-53.
[11] 厉秉强,王骞,王滨海,等. 利用无人直升机巡检输电线路[J]. 山东电力技术,2010(1):1-4.
LI Bingqiang,WANG Qian,WANG Binhai,et al. Applying Unmanned Autonomous Helicopter to Transmission Line Inspection [J]. Shandong Electric Power,2010(1):1-4.
[12] 陈晓兵,马玉林,徐组舰. 无人飞机输电线路巡线技术探讨[J]. 南方电网技术,2008,2(6):56-61.
CHEN Xiaobin,MA Yulin,XU Zujian. Research on Transmission-lines-cruising Technology with the Unmanned Aerial Vehicle[J]. Southern Power System Technology,2008,2(6):56-61.
[13] 彭延辉,徐国华. 无人驾驶直升机的技术发展及其关键技术[J]. 飞行力学,2004,22(1):1-6.
PENG Yanhui,XU Guohua. Development and Key Technologies of VTOL UAVs[J]. Flight Dynamics,2004,22(1):1-6.
[14] 张文峰,彭向阳,陈锐民,等. 基于无人机红外视频的输电线路发热缺陷智能诊断技术[J]. 电网技术,2014(5):1334-1338.
ZHANG Wenfeng,PENG Xiangyang,CHEN Ruimin,et al. Intelligent Diagnostic Techniques of Abnormal Heat Defect in Transmission Lines Based on Unmanned Helicopter Infrared Video[J]. Power System Technology,2014(5):1334-1338.
[15] 戴利波. 紫外成像技术在高压设备带电检测中的应用[J]. 电力系统自动化,2003,27(20):97-98.
DAI Libo. Application of UV Imaging Technology in On-line Detection on High Voltage Equipment[J]. Automation of Electric Power Systems,2003,27(20):97-98.
[16] 彭向阳,钟清,饶章权,等. 基于无人机紫外检测的输电线路电晕放电缺陷智能诊断技术[J]. 高电压技术,2014,40(8):2292-2298.
PENG Xiangyang,ZHONG Qing,RAO Zhangquan,et al. Intelligent Diagnostic Techniques of Transmission Lines Corona Discharge Defect Based on Ultraviolet Detection from Unmanned Aerial Vehicle[J]. High Voltage Engineering,2014,40(8):2292-2298.
[17] 郑顺义,谭金石,季铮,等. 基于立体相机的电力线测距技术研究[J]. 测绘信息与工程,2010,35(1):38-39.
ZHENG Shunyi,TAN Jinshi,JI Zheng,et al. Power Line Distance Measuring Technology Based on Stereo Camera[J]. Journal of Geomatics,2010,35(1):38-39.
[18] 阳锋,徐祖舰. 三维激光雷达技术在输电线路运行与维护的应用[J]. 南方电网技术,2009,3(2):62-64.
YANG Feng,XU Zujian. Application of the LiDAR Technology on Operation and Maintenance of Power Transmission Lines[J]. Southern Power System Technology,2009,3(2):62-64.
[19] 麦晓明,王锐,陈海涵,等. 输电线路无人机巡检数据链路通信系统设计[J]. 广东电力,2014(4):76-81.
MAI Xiaoming,WANG Rui,CHEN Haihan,et al. Design of UAV Transmission Line Inspection Data Link Communications System[J]. Guangdong Electric Power,2014(4):76-81.
[20] 麦晓明,刘正军,彭向阳,等. 无人机电力线路安全巡检航线及任务规划软件系统设计[J]. 广东电力,2013,26(12):81-85.
MAI Xiaoming,LIU Zhengjun,PENG Xiangyang,et al. Design on Safe Inspection Route and Mission Planning Software System for Unmanned Aerial Vehicle Electric Power Circuit[J]. Guangdong Electric Power,2013,26(12):81-85.
[21] 刘瑾,雷仲魁. 遗传算法提高卡尔曼滤波器在无人机滑行控制中的应用[J]. 信息化研究,2009,35(10):48-51.
LIU Jin,LEI Zhongkui. Application of Genetic Algorithm to Improve Kalman Filter in Unmanned Vehicle Control of Slipping[J].Informatization Research,2009,35(10):48-51.
[22] 尚莹,高晓光,符小卫. 基于非线性PID控制的无人机飞控系统优化设计[J]. 飞行力学,2010,28(3):47-50.
SHANG Ying,GAO Xiaoguang,FU Xiaowei. Optimal design for UAV's Flight Control System Based on non-linear PID Control[J]. Flight Dynamics,2010,28(3):47-50.
王柯(1983),男,河北邯郸人。工程师,工学博士,主要从事输电线路智能巡检和高电压试验研究工作。
蔡艳辉(1973),男,湖北广水人。研究员,工学博士,主要从事GNSS高精度动态定位、GNSS软件接收机和导航系统等方面研究。
彭向阳(1971),男,湖北黄冈人。教授级高工,工学硕士,从事输电线路及高电压技术工作,主要研究方向为输电线路运行、故障诊断及高效、智能运维检测技术,电力系统过电压及绝缘配合,高电压试验技术等。
(编辑彭艳)
广东电网大型无人机电力线路全自动巡检系统
为了有效解决生产运行中面临的巡线难度大、风险高等问题,由广东电网有限责任公司电力科学研究院牵头开发,并与总参谋部第六十研究所、佛山供电局、清远供电局等8家单位组建无人机巡检科技创新团队,联合攻关无人机巡检应用难题,历时4年终将无人机技术有效应用于电网巡检工作中。仅2014年度,项目研发的无人机在广东电网7个供电局的巡检里程达680 km,飞行架次52次,发现输电线路缺陷、隐患200余项。现场实际应用表明该机能够良好适应夏冬天高低温、晴、阴、雨、雾、大风等不同天气环境,以及平原、丘陵、山区、江河等不同地形环境,其搭载的光学、红外、紫外传感器,不仅能够发现绝缘子自爆、防污涂料脱落等可见缺陷,而且能够发现线夹温升异常、放电等一般巡线难以发现的缺陷,因而能够有效满足各类现场飞行要求。
(本刊编辑部整理)
Integrated Design on Multi-sensor System of Large Unmanned Helicopter for Electric Power Inspection
WANG Ke1, CAI Yanhui2, PENG Xiangyang2, LIU Zhengjun2, MAI Xiaoming1, ZHANG Jinduo2
(1.Electric Power Research Institute of Guangdong Power Grid Co., Ltd., , Guangzhou, Guangdong 510080, China; 2.Chinese Academy of Surveying and Mapping, Beijing 100830, China)
Abstract:Based on requirements for safe inspection on electric power lines, a kind of multi-sensor system of unmanned helicopter which includes visible light camera, infrared imager, ultraviolet imager, laser scanner, positioning and orientation system (POS), and so on is designed. Meanwhile, a high-precision and post-process soft synchronization method based on global positioning system (GPS) is proposed for realizing independent, coordinate and synchronous work of each sensor system. Software structure based on server-customer is designed to realize mutual independence of each sensor control and data acquisition, and furthest improve security and reliability of the sensor system. Experimental results of inspection of the multi-sensor integrated unmanned helicopter indicate that this system could obtain multi-wave and polytype inspection data at the same time in one single flying, and there is strong correlation among data which could be used for united diagnosis and analysis on multi-source data and satisfy requirement for automatic diagnosis on multi-factor in potential safe hazards of electric power lines.
Key words:large unmanned helicopter; visible light camera; laser scanner; infrared thermal imager; ultraviolet imager
作者简介:
中图分类号:TM726;TP212
文献标志码:A
文章编号:1007-290X(2016)02-0095-09
doi:10.3969/j.issn.1007-290X.2016.02.019
基金项目:国家自然科学基金(41371406);国家高技术研究发展计划(863计划)资助项目(2013AA12A201);南方电网公司重点科技项目(K-GD2013-030)
收稿日期:2015-11-04
