
基于非均匀粒度聚类的电子目标多传感器识别
2016-04-09 03:09:52陈婷,郭凯,陈卫
无线电工程 2016年3期
关键词:粒度
陈 婷,郭 凯,陈 卫
(陆军军官学院 无人机教研室,安徽 合肥 230031)
基于非均匀粒度聚类的电子目标多传感器识别
陈婷,郭凯,陈卫
(陆军军官学院 无人机教研室,安徽 合肥 230031)
摘要在对电子目标进行识别时,一般采取多传感器融合的D-S证据理论,但是在实际应用中,证据理论存在不同证据冲突的问题。针对此问题,将证据转化成欧氏空间中的点,证据之间的冲突程度转化成距离,对证据进行聚类,用经过聚类后的证据来实现电子目标多传感器融合识别。仿真实验的结果证实了该方法的有效性和实用性。
关键词电子目标;粒度;证据理论;证据冲突;欧氏距离;证据聚类
The Research on Electronic Target Recognition with Multi-sensor Based on Uneven Granularity Clustering
CHEN Ting,GUO Kai,CHEN Wei
(UAVTeachingandResearchSection,ArmyOfficerAcademyofPLA,HefeiAnhui230031,China)
AbstractWhen recognizing the electronic targets,the theory of D-S evidence with syncretic multi-sensor is usually applied.But in fact,the problem of evidence conflict in D-S theory always exists.For this problem,evidence is transformed to a point in Euclidean space first in this paper,the conflict degree between evidences is transformed to distance,and then the evidence clustering is done according to the distances,the evidence after clustering is used to realize multi-sensor electronic target recognition lastly.Simulation test and its results show that this method is effective and practical.
Key wordselectronic target recognition;granularity;evidence theory;evidence conflict;Euclidean distance;evidence clustering
0引言
随着空间侦察探测手段的多样化,传感器数目和种类日益增加,获得的信息也越来越多,多种多样的信息表达形式使得信息的处理变得复杂。人们越来越希望传感器系统在获取原始信息的基础上增加智能分析和判断的能力,作为一种对经典概率的扩展,证据理论在信息融合以及目标跟踪和识别技术中得到了广泛应用,但是在实际应用中,随着传感器和目标数目的增加,证据理论存在不同证据冲突的问题[1,2]。
针对证据冲突的问题,应用基于商空间的非均匀粒度聚类方法[3],将其与D-S证据理论结合,提出一种新的非均匀粒度证据聚类方法,并将其用于电子目标多传感器融合识别中,一定程度上解决了证据冲突的问题。
1证据理论


∀A∈Ω且A≠φ时,称m(A)为Ω上的基本概率赋值(Basic Probability Assignment),也有人称之为A的Mass函数。定义在Ω上的一个m(·)就构成了识别框架Θ上的一个证据。m(A)>0的命题称为证据的焦点元素或焦元[4]。
定义2:Θ为一识别框架,m(A)为Ω上的基本概率赋值函数,满足下列条件的函数为信任函数(Belief Function)[5]:
2证据空间到欧氏空间的转换
2.1证据的清晰化
分析焦元的形式可知,焦元可能是单命题形式,也可能是多命题形式。单命题对应辨识框架中的基本假设,所以给出的结论是清晰的;而多命题是各基本假设的组合,所以给出的结论是模糊的。在实际应用证据理论组合证据时,有时得不到清晰的结论(单命题结论),因此就需要一种手段来消除这种模糊性,以确定最有可能的结论,即证据的清晰化[6]。
Philippe Smets[7]在其传递信任函数模型中详细论述了如何将信任度(Bel)转化成概率(Probability)的问题,并定义为概率转化过程(用Γ表示),用Γ得到的概率为BetP,即BetP=Γ(Bel,F),其中F是在传递过程中辨识框架中实际可能的基本命题的集合。他认为当一个基本信任分配(Basic Belief Assignment,BBA)m赋予的是一个多命题焦元,如m(t)时,该命题包含的每个单命题获得的BBA值应该是相等的。用BetP来计算:

(1)

这样,利用式(1)可将所有证据转化成单命题形式的概率分配形式,可以称之为证据的清晰化处理。
2.2证据在欧氏空间中的表示
假设证据空间为E,E是由焦元“张成”的。严格地说,由于焦元之间的互相覆盖(不相互正交),证据空间只是一个集合,而不是真正的空间,也因此造成了证据在E中的位置无法确定,使得通常的解决点聚类问题的方法无法直接用于证据聚类[8]。
一个含有n个互斥命题的辨识框架Θ等效于一个n维的欧氏空间Sn,辨识框架中的基本命题Sn就是Sn中的基。由此,将证据根据式(1)进行清晰化处理之后,就可以在欧氏空间表示出来。由于BetP在Sn的各个方向上最大取值为1,所以证据在Sn中的位置在边长为1的n边体内,真实事件的各种状态在n边体的各顶点。
证据在Sn中表示出来后,由于不确定性,其坐标通常不在该n边体的顶点上,而是在该正交多面体中间的某个点,其最靠近的顶点所表示的基本命题就是该证据最可能的假设[9]。
3非均匀粒度证据聚类方法
证据通过清晰化处理后,就取得了一个坐标值,即相当于欧氏空间里的一个点,有了点坐标值,就可以利用点聚类的方法进行证据聚类了。
在实际中,在获得确切情报前,往往对当前出现事件的准确数目是未知的,因此无法确定将得到的证据聚成几类才能反映真实情况。为了解决这个问题,将基于商空间的非均匀粒度聚类算法应用于证据聚类。
3.1证据非均匀粒度聚类方法
根据前述内容得到的结论,将所有待聚类的证据样本都转化到欧氏空间中的坐标点,这样就得到了点聚类问题中的数据点,利用非均匀粒度聚类算法对这些数据点进行聚类,就得到了非均匀粒度证据聚类方法,其具体方法步骤如下[10]:
① 将得到的证据进行清晰化处理,得到所有证据对应的点坐标;
② 初始化粒度dλ;
③ 计算每对证据数据点xi,xj的距离d,如果d≤dλ,则xi,xj所在的类进行合并;
④ 如果要继续考察聚类结果,每个子类,调整粒度和证据空间,对新的证据空间聚类。
其中,步骤②中的粒度dλ也称为距离阈值,它的取值一般为1>dλ>0.5[11]。本方法通过对证据空间按照非均匀粒度来进行聚类,从而实现了对证据空间聚类结果的非均匀粒度考察,同时,将聚类数目的确定转化为粒度的合理选取问题。
3.2粒度的选取问题
在实际应用中,粒度的选取问题可以有多种方法,概括起来,主要有以下3种[12]:
① 根据先验知识和专家经验,选择合理的粒度;
② 对不同的聚类结果进行分析,建立一定的聚类评价准则进行评价,自适应选择最合理的粒度,对应于最终的聚类结果;
③ 结合其他的情报或者位置信息进行选取。
3.3证据聚类的合成方法
应用上述非均匀粒度证据聚类方法将证据分为c类,可以避免2个冲突较大的证据分在同一组内,从而避免了冲突证据的合成[13]。

另设第l类中证据的个数为S(l),l=1,2,…,c。依据各类中所包含的证据的个数确定该类证据的加权系数:

(2)
对所有分类合成证据做加权平均可得最终的合成证据为:
(3)
4仿真实验分析
4.1仿真1
假设在对某一电子目标o1进行侦察时,电子目标自动识别系统中有13个传感器(或者不同周期提供数据)提供未知电子目标的类型信息,考虑目标关联错误和信号干扰等因素,第3条、第5条和第10条证据受到干扰,与其他证据冲突,得到的各传感器对目标的基本概率赋值如表1所示。表1中,o代表目标类型,m代表传感器(下同)。
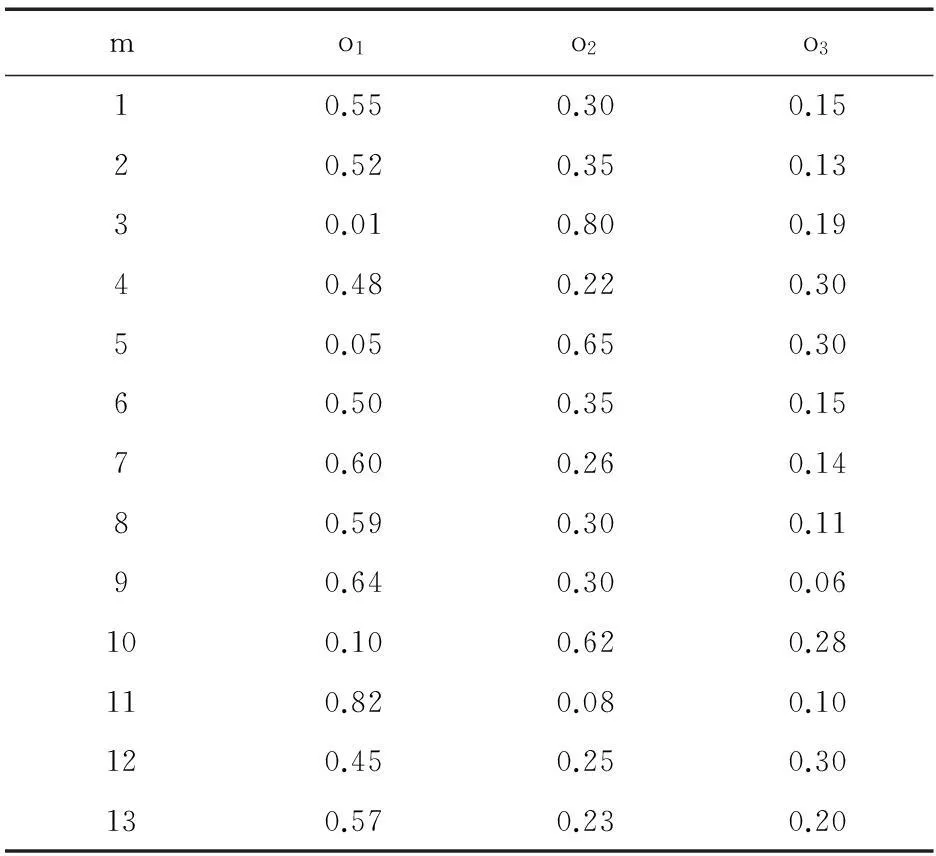
表1 13条证据的基本概率赋值
根据粒度选取方法1最终确定粒度dλ=0.97,基于非均匀粒度证据聚类算法可以将以上证据分为2类,如图1所示。由图1可以看到,经过聚类,3条干扰证据被分为一类,其他一致证据被分为一类。

图1 证据聚类结果
在初步分类的基础上对证据进行融合,就可以得到融合结果。与D-S直接合成方法进行对比,得到的融合结果如表2所示。

表2 有3条干扰证据时各种证据组合方法比较
从表2中可以看出,由于干扰冲突证据的原因,直接使用证据理论不能区分干扰证据,将所有证据同等对待,得到的结果不能正确识别目标;用新方法可以将干扰证据与一致证据区别对待,经过加权处理,降低了不确定性,能够正确识别目标。
4.2仿真2
假设表1中的第1条证据m1(o1)=0.55,m1(o2)=0.30,m1(o3)=0.15也被干扰,干扰后的证据为:m1(o1)=0.25,m1(o2)=0.10,m1(o3)=0.65,经计算确定粒度dλ=0.96,基于非均匀粒度证据聚类算法可以将以上证据分为3类,如图2所示。
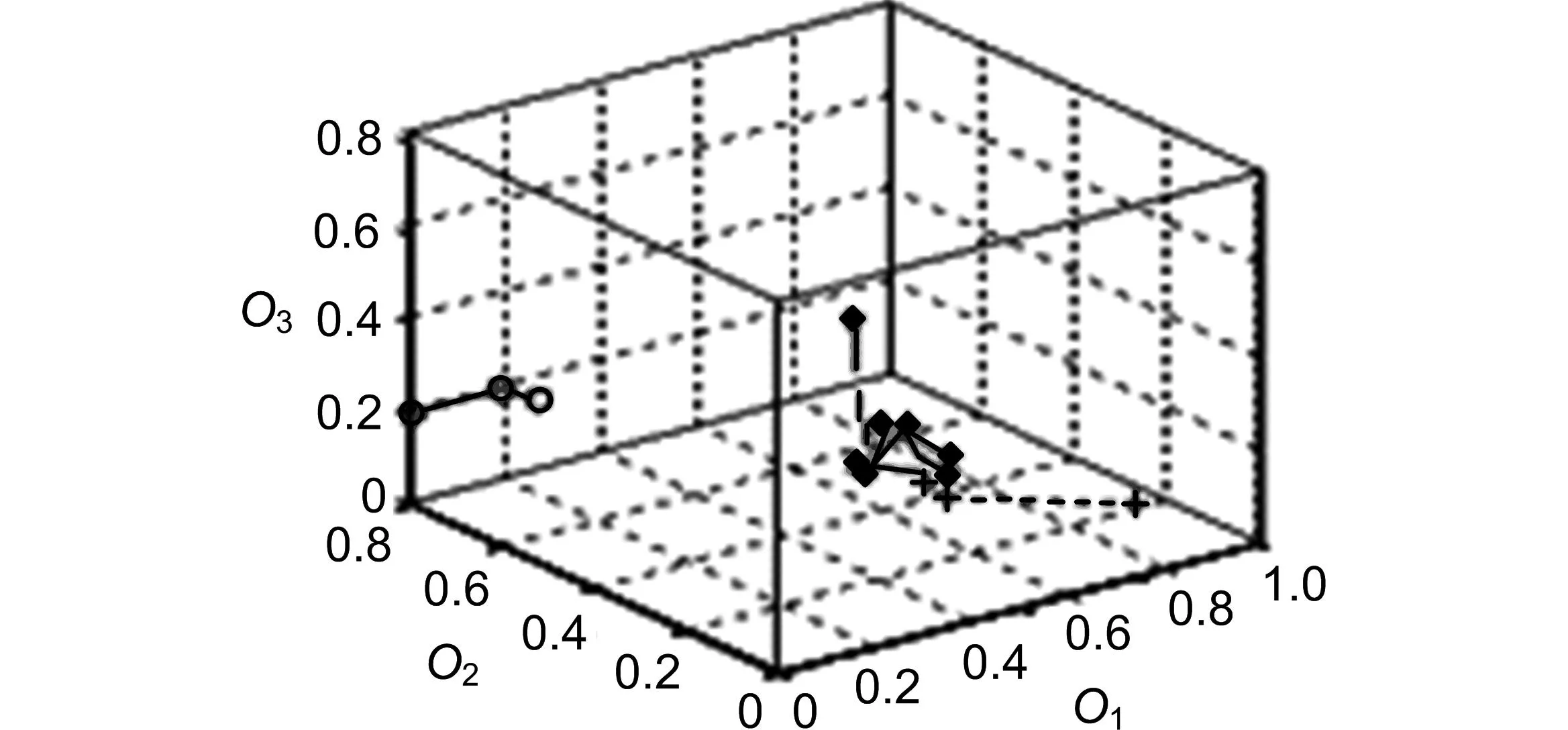
图2 证据聚类结果
证据合成后得到的识别结果如表3所示。
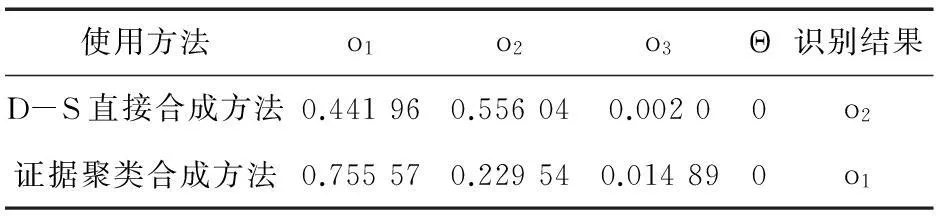
表3 有4条干扰证据时各种证据组合方法比较
从表3中可以看出,当干扰证据增多时,直接使用证据理论不能正确识别目标,用证据聚类合成新方法可以将干扰冲突证据与一致性证据区别对待,经过加权处理,降低了不确定性,能够正确识别目标,得到了很好的效果。
从以上仿真实验可以看出,基于非均匀粒度聚类的证据合成方法能够对证据进行有效分类,将干扰证据与一致证据区别对待,具有良好的融合性能。
5结束语
随着智能信息处理技术的发展,各种不同的目标融合识别方法将更加智能化,并且不断交叉融合,在实际应用中产生了众多性能优异的目标识别融合方法。本文将粒度聚类与证据理论相结合,降低了证据的冲突和不确定性,有效地提高了目标识别的准确率,作为一种信息分类技术,这对于解决干扰条件下多传感器目标融合识别问题提供了一种有效途径,将在信息融合和目标识别等领域有较好的应用前景。
参考文献
[1]韩崇昭,朱洪艳,段战胜.多源信息融合[M].北京:清华大学出版社,2006.
[2]DAVID L H.An Introduction to Multi-sensor Fusion[C]∥International Workshop on Data Fusion,2002:112-114.
[3]徐峰,张铃.基于商空间的非均匀粒度聚类分析[J].计算机工程,2005,31(3):26-28.
[4]杨春,李怀祖.一个证据推理模型及其在专家意见综合中的应用[J].系统工程理论与实践,2001(4):43-48.
[5]石闪闪.一种新的基于证据权重的D-S改进方法[J].科学技术与工程,2014,14(8):205-208.
[6]周大伟,叶清.基于互冲突量和自冲突量分析的证据聚类方法[J].火力与指挥控制,2011,36(6):39-41.
[7]SMETS P,KENNES R.The Transferable Belief Model [J].Artificial Intelligence,1994,66(2):191-234.
[8]朱卫未,王卫平,梁樑.基于模糊聚类分析的入侵检测方法[J].系统工程与电子技术,2006,28(3):474-477.
[9]LAWRENCE A K.Sensor and Data Fusion Concepts and Applications[M].Washington:SPIE Optical Engineering Press,1999.
[10]徐丽,丁世飞.粒度聚类算法研究[J].计算机科学,2011,38(8):25-28.
[11]严晓兰.基于粗集理论证据加权的电子目标识别法[J].现代防御技术,2011,39(4):75-79.
[12]卜东波,白硕,李国杰.聚类/分类中的粒度原理[J].计算机学报,2002,25(8):810-816.
[13]JOUSSELME A L,GRENIER D,BOSSE E.A New Distance Between Two Bodies of Evidence[J].Information Fusion,2001,2(1):91-101.
陈婷女,(1982—),博士,讲师。主要研究方向:信号处理与模式识别。
郭凯男,(1976—),博士,讲师。主要研究方向:无线通信和无人机工程。
作者简介
收稿日期:2015-12-01
中图分类号TN957.51
文献标识码A
文章编号1003-3106(2016)03-0018-04
doi:10.3969/j.issn.1003-3106.2016.03.06
引用格式:陈婷,郭凯,陈卫.基于非均匀粒度聚类的电子目标多传感器识别[J].无线电工程,2016,46(3):18-21.
猜你喜欢
粉末冶金技术(2021年3期)2021-07-28 06:26:16
南京大学学报(自然科学版)(2021年1期)2021-01-30 14:01:04
小型微型计算机系统(2020年10期)2020-10-21 00:58:16
冶金设备(2019年6期)2019-12-25 03:08:40
成都信息工程大学学报(2018年5期)2018-12-06 09:24:00
计算机应用(2017年12期)2018-01-08 07:46:17
系统工程与电子技术(2016年12期)2016-12-24 07:19:14
浙江大学学报(工学版)(2016年11期)2016-06-05 09:21:05
应用海洋学学报(2015年3期)2015-11-22 07:39:12
中南大学学报(自然科学版)(2015年9期)2015-10-13 11:26:34
