
基于虚拟样机的并联康复按摩医疗机器人仿真研究
2016-04-08 03:45黄秀琴廖辉马延丰韩玲玲
常州工学院学报 2016年6期
黄秀琴,廖辉,马延丰,韩玲玲
(常州工学院机械与车辆工程学院,江苏常州213032)
基于虚拟样机的并联康复按摩医疗机器人仿真研究
黄秀琴,廖辉,马延丰,韩玲玲
(常州工学院机械与车辆工程学院,江苏常州213032)
以具有空间三平移自由度的3-RPC并联机器人作为研究对象,在SolidWorks软件平台上进行了三维实体建模与虚拟装配,并将装配体导入ADAMS软件。根据输入与输出的映射关系,在动平台的参考点上给定一个输出轨迹,测得三个输入的位移、速度、加速度曲线,获得机器人运动学逆解。通过仿真验证机器人机构设计的正确性及在康复按摩医疗机器人领域应用的可行性。
并联机器人;康复按摩医疗机器人;仿真
0 引言
并联式康复按摩医疗机器人是医学机器人和并联机器人相结合的产物。并联式康复按摩医疗机器人是并联机器人研究领域的一个重要部分,它贯穿了生命科学、电子学、医学、材料学、计算机技术和机器人等领域,已成为国际并联机器人研究的一个重要方向。目前,并联式康复按摩医疗机器人已广泛应用于康复训练、体育锻炼和康复治疗等领域,不仅促进了并联机器人和康复医学的发展,也加快了康复医疗学的新理论和新技术的发展[1]。
本文研究的并联式康复按摩医疗机器人具有空间三平移自由度,动平台和定平台之间通过三个具有伸缩杆的支链相联接,改变和控制支链伸缩杆的长度即可使动平台的空间位置和姿态发生变化,从而可以根据病人的实际情况来实施对背部或腰部的按摩。
1 机构的描述
图1为3-RPC并联式康复按摩医疗机器人的结构示意图。该机器人由定平台(下平台)、动平台(上平台)和三个支链组成。每个支链包含一个移动副(P副)、一个转动副(R副)和一个圆柱副(C副)。P副作为驱动原动件,由液压缸和活塞组成,液压缸与固定平台通过R副相连,活塞与动平台通过C副相连,驱动杆可在一定的约束范围内沿轴线方向做伸缩运动。按摩器则安装在动平台上,一般以动平台的几何中心点作为安装位置,并使按摩器的轴线方向与动平台的法线方向保持一致。为了使按摩器到达需要按摩的准确位置,可通过调节三个驱动杆的长度,改变按摩器的位置和姿态。

图1 3-RPC并联机器人结构示意图
2 并联康复按摩医疗机器人的虚拟样机模型
根据并联式康复按摩医疗机器人的实际结构和具体参数要求,利用SolidWorks软件的参数化设计的优点,在给定并联机器人机构的具体结构情况下,参数化设计可以高效地进行三维建模、装配和干涉校验[2]。在SolidWorks软件中设计的具有确定实际尺寸的机器人文件将被另存为Parasolid(*.x_t)文件,再将该Parasolid文件导入到ADAMS软件中进行动态仿真,获得机器人机构的运动特性曲线,从而解决并联式康复按摩医疗机器人的位置正解和逆解问题,考察和验证并联康复按摩医疗机器人的实际运动。需要注意的是:从SolidWorks软件中导入到ADAMS的并联机器人虚拟样机,必须对各个关节施加约束。具体方法是:大地与固定平台之间添加固定副,定平台与液压缸之间添加转动副,液压缸与活塞之间添加移动副,活塞与动平台之间添加圆柱副。考虑到伸缩杆的行程限制,每个液压缸和活塞之间都添加了两个距离传感器,当伸缩杆的行程不在规定范围之内时,停止仿真,本文中假定驱动杆伸缩范围为150≤Li≤300 。施加上述约束后,整个虚拟样机简化模型也就建立起来了。图2为导入到ADAMS软件并添加了约束后的并联机器人样机模型。

图2 并联机器人虚拟样机模型
3 运用ADAMS进行仿真分析的主要步骤
并联机器人的仿真分析主要是为了验证输入和输出部件的位移、速度和加速度之间的映射关系。通过仿真,研究各运动副和各部件的相对运动状态,由此判断几何约束条件是否合理可靠,并考察系统的速度和加速度特性[3]。通过运动控制,借助于运动学逆解数学模型,动平台参考点的运动变化曲线即可转换为各个驱动杆的长度变化曲线,反过来驱动运动平台在空间内进行实时运动,逆解和正解的转换使得按摩器能按照期望的运动轨迹运动。ADAMS /View环境下求解运动学正逆解的基本流程如图3所示。虚拟样机性能参数的测量则利用ADAMS /View中自带的测量功能(Measure),并在后处理模块(PostProcessor)中进行仿真分析。
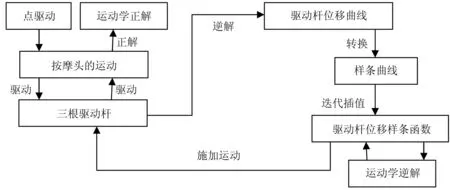
图3 求解运动学正逆解的基本流程图
4 算例
设并联机器人的参数:定平台形心到转动副轴线的垂直距离为74.10 mm,动平台形心到圆柱副轴线的垂直距离为35.80 mm,驱动杆伸缩范围为150≤Li≤300。
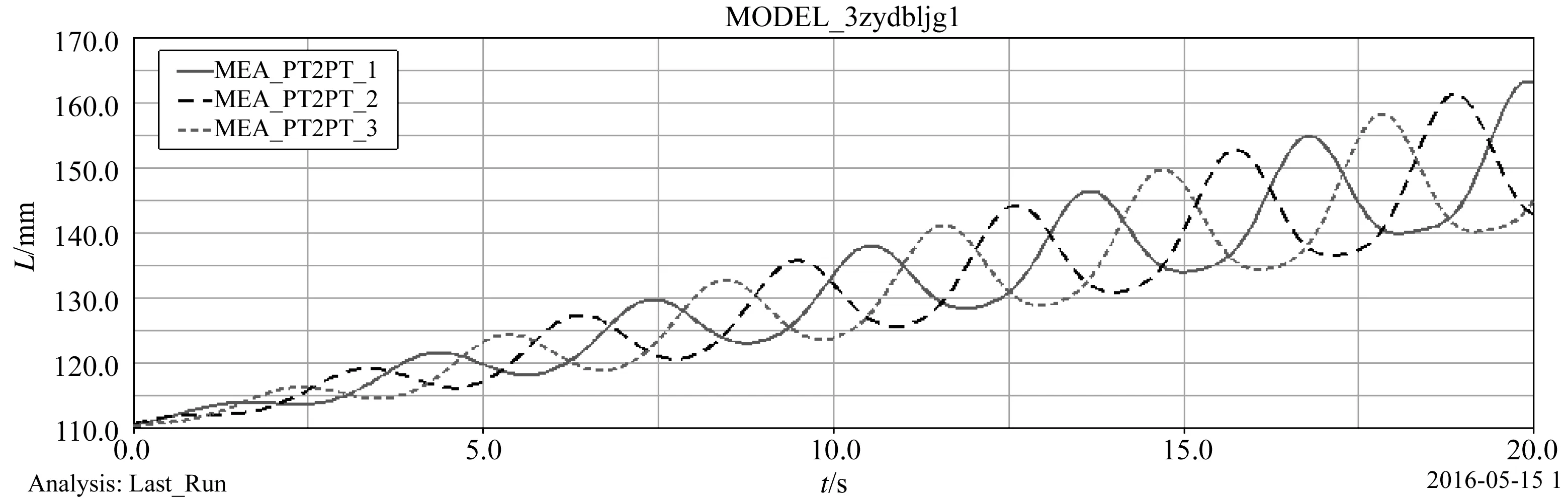
图5 三根伸缩杆的位移变化曲线
4.1 创建驱动
求运动逆解,首先给按摩器上的参考Marker点施加一个一般点驱动,使按摩器实现期望的运动轨迹要求。然后,运用ADAMS/View提供的函数生成器定义关于时间的函数来构造运动激励三个移动方向的运动,使动平台按摩器上的参考Marker点实现期望运动,其运动方程为:

(1)
设运动仿真时间为20 s,仿真步长为200,通过设置六个传感器保证伸缩杆在有效的范围内运动。仿真完成后,对动平台按摩器参考点进行轨迹追踪,获得动平台上参考点的运动轨迹为螺旋线上升的倒锥型曲线,该曲线符合实施背部或腰部按摩过程,即由点到面,面不断加大,有利于控制按摩的力度和强度,如图4所示。

图4 动平台参考点的轨迹
4.2 并联机器人的运动特性分析
利用ADAMS /View的对象测量功能(Mea-sure)可以很方便地得到按摩器的位置和姿态随时间的变化曲线。按摩器运动经各运动环节逆向传递给驱动杆,得到各驱动杆伸缩的位移、速度、加速度随时间变化的曲线(如图5~7所示)。用后处理模块(Post-Processor)创建样条曲线功能,对三根伸缩杆的位移变化曲线进行处理,即可得到伸缩驱动杆的位移样条函数 (i=1,2,3),由此完成了运动学逆解的求解。

图6 三根伸缩杆的速度变化曲线

图7 三根伸缩杆的加速度变化曲线
求解运动学正解,则将逆解中施加在按摩器参考点上的驱动删除,再把逆解仿真中测量得到的驱动杆位移样条函数Spline_i(i=1,2,3)作为驱动变量,分别施加给对应的三根伸缩驱动杆(注意必须一一对应),驱动杆的运动函数可表达为AKISPL(time,0,lpline_i,0),在伸缩杆的驱动下按摩器实现预期的运动轨迹与逆解一致,再利用对象测量功能可测得按摩器的运动特性曲线,由此完成运动学正解的分析[4-5]。通过虚拟样机求出的驱动杆运动函数如果在真实的物理样机上实现可以采用单片机控制,根据驱动的运动曲线,编写程序。该部分内容属于机器人控制部分,不在本文讨论的范围。结果表明,将逆解仿真测量中得到的驱动杆位移样条函数作为运动激励驱动按摩器运动后得到的按摩器位姿变化曲线(正解结果),与开始施加给按摩器的点驱动位姿曲线相同,这就证明了运动学仿真结果的正确性,也说明了机构设计的正确性和可行性。
5 结论
1)图7为三根伸缩杆即驱动杆的加速度曲线,从图中可以看出,整个曲线比较光滑,不存在加速度的突变,也就不存振动和冲击,这有利于机器人在工作过程中进行实时控制,可作为按摩机器人主运动机构,适合背部和腰部的按摩。
2)通过并联按摩机器人的建模和仿真,可大大提高研究效率,降低设计和开发成本,为并联按摩机器人的研制提供了可靠的技术支持。进行虚拟样机的仿真,能使研究人员很直观地看到机器人传动杆和动平台的实时运动过程,为控制按摩器的位移和姿态提供了有力的数据参考。参考点的轨迹规划简单实用,为并联机器人的研究提供了较为理想的设计方法。
3)本文的康复按摩医疗机器人的实体建模和运动仿真,较好地实现了康复按摩医疗机器人仿真过程中的真实感图形显示和动画显示。干涉检验和运动仿真对该康复按摩医疗机器人的结构设计、运动研究和控制研究等提供了强有力的支撑,具有一定的实用价值。
[1]康复机器人.百度百科[EB/OL].[2016-08-21].http://baike.baidu.com/link?url=j76tdc4CRrV4f75UyoUATcrJoPkyxNrHwEsX3Ec8koVsrobC0、|2sgAhSUPvCaXfB.
[2]张忠将.SolidWorks 2014机械设计完全实例教程[M].北京:机械工业出版社,2015:80-120.
[3]马履中,王劲松,杨启志,等.基于一种新型并联机构的中医推拿机器人[J].中国机械工程,2004(16):69-72.
[4]黄剑文,李瑞琴,蒋红军,等.3-RCR并联机器人的设计和运动分析[J].机床与液压,2015(9):13-16.
[5]王洪伟,魏英姿,常勇,等.3自由度并联按摩机构的运动学模型研究[J].沈阳理工大学学报,2013(1): 71-74,94.
责任编辑:杨子立
Simulation of Rehabilitation Massage Medical Parallel Robot Based on Virtual Prototype
HUANG Xiuqin,LIAO Hui,MA Yanfeng,HAN Lingling
(School of Mechanical and Vehicle Engineering,Changzhou Institute of Technology,Changzhou 213032)
A three translational degrees of freedom 3-RPC parallel robot was the research object.The 3D modeling and virtual assembly were built on SolidWorks platform,with the assembly model imported into ADAMS software.According to the mapping relationship between the input and output,the output trajectory was given throught the reference points on the moving platform.The displacement,speed and acceleration curve of the three inputs were measured to obtain the inverse solution of the robot′s kinematics.Simulation results verify the correctness of the robot mechanism design and the feasibility of its application in rehabilitation massage medical robot.
parallel robot;rehabilitation massage medical robot;simulation
10.3969/j.issn.1671⁃0436.2016.06.010
2016-11-28
江苏省大学生创新创业训练项目(201611055036X)
黄秀琴(1969— ),女,硕士,副教授。
TH112;TP24
A
1671- 0436(2016)06- 0042- 04
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
中学生数理化·中考版(2021年10期)2021-11-22
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
