船载雷达光轴晃动对修正参数标定的影响*
2016-04-06 00:19钟德安茅永兴冯鸿奎中国卫星海上测控部江苏江阴2443飞行器海上测量与控制联合实验室江苏江阴2443
电讯技术 2016年2期
关键词:误差修正模型
钟德安,茅永兴,刘 扬,包 飞,冯鸿奎(.中国卫星海上测控部,江苏江阴2443;2.飞行器海上测量与控制联合实验室,江苏江阴2443)
船载雷达光轴晃动对修正参数标定的影响*
钟德安**1,2,茅永兴1,2,刘 扬1,包 飞1,冯鸿奎1
(1.中国卫星海上测控部,江苏江阴214431;2.飞行器海上测量与控制联合实验室,江苏江阴214431)
**通信作者:Zda1014@126. com Corresponding author:Zda1014@126. com
摘 要:船载雷达标校望远镜光轴、标校电视光轴在天线不同状态下会产生不同程度的晃动,可达角分量级,在利用反向法标定雷达零位和轴系误差时,会给标定结果带来较大误差。针对此问题,提出了通过分别检测天线在正向、反向状态下标校望远镜光轴与标校电视光轴间不平行度以判定光轴是否存在晃动的方法,同时提出了利用大地测量成果精确解算光轴俯仰晃动量的方法,给出了解算模型,试验表明解算精度满足雷达标校要求。在此基础上给出了当光轴存在俯仰晃动时,俯仰零位、俯仰光电偏差、天线重力下垂误差等相关参数标定的改进数据处理模型。
关键词:船载雷达;光轴晃动;参数标定;误差修正模型
1 引 言
从历次船载雷达坞内标校情况来看,用于标校基准的标校望远镜光轴、标校电视光轴均存在一定程度的晃动,不管是方位或是俯仰,量级可达角分。呈现两种现象:一是天线正向和反向状态下光轴存在晃动,即标校望远镜光轴、标校电视光轴在天线正向和反向状态下指向不一致;二是长期使用后,光轴指向与标校时的初始指向不一致。光轴的晃动会影响标校成果的正确性(包括零位和轴系误差等修正参数),从而影响测量精度。
为解决光轴晃动带来的误差,文献[1]提出了一种动态条件下通过船载经纬仪和雷达标校电视联合测恒星标定雷达轴系误差修正参数的数学方法,但其主要缺点是标校精度受船载经纬仪动态测星精度限制,同时仍需以坞内标校为基础。近年来数字摄影测量技术发展很快,可以精确测定目标的三维坐标,广泛应用于航天器变形、天线面精度等的检测中[2],但在测量光轴晃动方面尚处在初步探索中。
由于光轴在方位上的晃动量暂无有效解算手段,为提高坞内标校的标定精度,本文在简要介绍船载雷达零位和轴系误差参数标定方法的基础上,提出了光轴在俯仰上晃动量的解算方法,并给出了相应误差修正参数标定改进的数据处理方法。
2 船载雷达零位和轴系误差标定方法
2. 1 标定原理
船载雷达标校应在船舶进坞坐墩的静态条件下进行[3]。反向法是船载雷达零位和轴系误差的主要标定方法,即船载雷达用电轴、标校望远镜或标校电视分别正向、反向测量方位标,录取方位角和俯仰角测量值,然后进行数据处理,解算零位和轴系误差[4]。在雷达修正参数标定中,反向法是一种常用的方法,具有精度高、方法简便的优点。
2. 2 标定方法
船载雷达零位和轴系误差修正参数主要包括方位角零位、俯仰角零位、光机偏差、俯仰轴和方位轴不正交、光电偏差、天线重力下垂误差、大盘不水平等。
2. 2. 1 方位角零位
方位角零位用反向法进行标定,数据处理公式为

式中:A0为待标定的方位零位;A+为正向方位测量值;A-为反向方位测量值;βm为大盘最大倾斜量;Am为大盘最大倾斜量所在方位角;E+为正向俯仰测量值;Kw为船载经纬仪标定出的全船统一航向角;Ad为大地测量提供的方位标相对于设备三轴中心的大地方位角。
2. 2. 2 俯仰角零位
用反向法瞄方位标标定俯仰角零位,数据处理公式为

式中:E0为待标定的俯仰角零位;Se为光轴偏心于三轴中心相对于方位标的俯仰角改正数;其余符号同上。
2. 2. 3 光机偏差
用反向法瞄方位标标定光机偏差Sb,数据处理公式为

式中:Sa为由大地测量成果提供的方位标方位角改正数。
2. 2. 4 俯仰轴与方位轴不正交
通常在北极星大距时刻采用反向法测量北极星获得两轴不正交误差δm,数据处理公式为
2. 2. 5 光电偏差
控制天线,使电轴对准校准塔上的电标,同时使方位、俯仰角误差电压输出为零。这时,校准塔上的光标应在标校望远镜或标校电视十字丝的中心,如果有偏差,即为光电偏差,分别为方位光电偏差Cs和俯仰光电偏差Ce。
2. 2. 6 重力下垂误差
重力下垂误差ΔEg采用反向法进行标定,数据处理公式如下:

式中:ΔE+为正向电跟踪时光标在标校电视中的脱靶量;ΔE-为反向电跟踪时光标在标校电视中的脱靶量;EL为馈源喇叭相对设备三轴中心的俯仰角大地测量值。
2. 2. 7 大盘不水平
大盘不水平用最大倾斜量βm和最大倾斜方向Am两个参数表示,通常采用水平仪进行标定。由于标校方法与光轴无关,这里不再赘述。
3 正倒镜状态下光轴晃动对修正参数的影响
从以上标定公式可以看出,除了光电偏差和大盘不水平外,其余零位和轴系误差的标定方法均为反向法,因而光轴在天线正、反向测量状态下的晃动会对这些参数的标定结果带来误差。目前,光轴方位晃动大小的解算暂无有效方法,尚需进一步研究。由于晃动量级可达角分量级,若不修正对俯仰零位、光电偏差和重力下垂误差的标定结果将带来较大误差,本文仅讨论俯仰晃动对标定结果的影响。
3. 1 光轴在天线正、反向状态下俯仰晃动量检测
下面给出光轴在天线正、反向状态下晃动的检测步骤。
(1)在船坞周围某一高层建筑的顶部建造“#”字形标校板,根据标校望远镜光轴、标校电视光轴与雷达三轴中心的几何尺寸关系设置反向法测量的对称光标。“#”字形标校板板面应与雷达的视准轴垂直和通视。
(2)正向测量光标:转动天线,使标校望远镜瞄准光轴标校板上的标校望远镜正向光标,读取光轴标校板上的标校电视正向光标在标校电视中的脱靶量ΔA+Wi、ΔE+Wi。重复5次以上,按式(6)和式(7)计算标校电视光轴与标校望远镜光轴的正向测量不平行度ΔA+W和ΔE+W:
式中:n为测量次数,n≥5。
(3)反向测量光标:转动天线,使标校望远镜瞄准光轴标校板上的标校望远镜反向光标,读取光轴标校板上的标校电视反向光标在标校电视中的脱靶量ΔA-Wi、ΔE-Wi。重复5次以上,按式(8)和式(9)计算标校电视光轴与标校望远镜光轴的反向测量不平行度ΔA-W和ΔE-W:
(4)按式(10)和式(11)计算正、反向测量时光轴晃动量:

式中:ΔA、ΔE分别为天线在正、反向状态下标校望远镜光轴与标校电视光轴间方位、俯仰相对晃动量,如果光轴不存在晃动,则ΔA、ΔE应为零。
3.2 光轴在天线正反向状态下俯仰晃动量分离方法
由式(10)和式(11)得到的是两个光轴间的相对晃动量,该晃动是由哪个光轴不稳定引起的尚不清楚,需要进一步定位和分离。目前,方位晃动量ΔA的定位和分离需进一步研究,俯仰晃动量ΔE的定位和分离已有有效方法。
雷达俯仰角度测量典型误差修正模型如下式(为清楚起见,公式中未计入编码器误差、大气折射误差、动态滞后误差等修正项):

式中:E'为修正后的俯仰角真值;E为俯仰角测量值;A为方位角测量值;其余符号同上。
当标校望远镜或标校电视用反向法测方位标标定俯仰角零位时,根据式(12),并考虑到采用光轴测量,正向测量时有下式:

式中:E0+为光轴正向测方位标获得的俯仰角零位; Ed为雷达三轴中心与方位标连线的大地俯仰角。同样,反向测量时有下式:

式中:E0-为光轴反向测方位标获得的俯仰角零位。
理论上E0+应等于E0-,如果不等,则表明光轴存在正、反向俯仰晃动,俯仰晃动量Δ∂用下式计算:

用式(15)可以计算出天线望远镜和标校电视存在的正、反向俯仰晃动量。
设望远镜存在的正、反向测量俯仰晃动量为Δ∂1,标校电视存在的正、反向测量俯仰晃动量Δ∂2,则有下式:

式中:ΔE为天线在正、反向状态下标校望远镜光轴与标校电视光轴间的俯仰相对晃动量。实际试验表明,与由式(11)的计算结果相一致。
3. 3 光轴俯仰晃动量对零位和轴系误差修正参数标定的影响
3. 3. 1 对俯仰零位标定的影响
如果光轴存在正倒镜晃动量Δ∂,如图1所示(相对天线正向,天线反向时光轴指向偏下,并设Δ∂为正号,下同),从公式(2)可以看出,获得的俯仰角零位是正向、反向瞄方位标的平均值,此时俯仰零位基准为图中虚线(平均指向),将引起Δ∂/2的俯仰零位标定误差,数据处理时应予以修正。公式(2)修正为

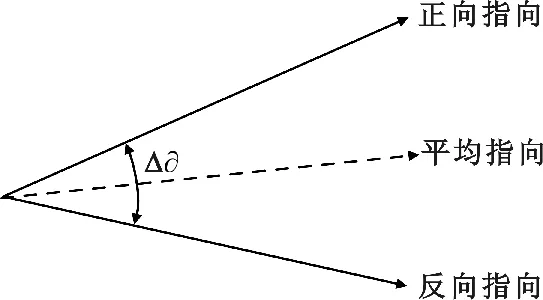
图1 存在俯仰晃动误差时光轴指向示意图Fig. 1 Optical axis direction when pitching jitter existing
3. 3. 2 对俯仰光电偏差和重力下垂标定的影响
当标校电视存在正、反向晃动误差Δ∂时(相对正向,反向时光轴指向偏下,示意图同图1),若采用标校电视正、反向测量法标定光电偏差和重力下垂时,将产生标定误差。不难得出,公式(5)将修正为

4 试验结果及影响分析
4. 1 试验结果
根据3. 1节方法,某船载雷达标校电视光轴与标校望远镜光轴间正向测量不平行度9次测量的平均值为:ΔA+W=-35. 30″,ΔE+W=40. 80″;反向测量不平行度9次测量的平均值为:ΔA-W=14. 50″,ΔE-W= 15. 70″。可计算得到正、反向光轴相对晃动量:ΔA= 49. 80″,ΔE=10. 10″。
通过标校望远镜、标校电视分别测量方位标(一般情况下,正向、反向分别测量3次),根据3. 2节方法,解算得到标校望远镜存在的正、反向测量俯仰晃动量为Δ∂1= 13. 30″,得到的标校电视存在的正、反向测量俯仰晃动量为Δ∂2= 25. 60″。而由式(16)得到的俯仰相对晃动量为12. 30″,接近3. 1节方法获得的俯仰晃动量(ΔE= 10. 10″)。通常情况两者差别与标校电视测量精度、雷达轴角编码器精度有关。该数据可说明本文提出的俯仰晃动量解算方法是可行和正确的。
4. 2 影响分析
从公式(17)、公式(18)可以看出,光轴在俯仰上的晃动将影响俯仰零位、俯仰光电偏差和重力下垂误差标定结果。
船载雷达可采用标校望远镜测量方位标进行标校,也可采用标校电视测方位标标校。根据以上试验结果,该雷达如果采用标校望远镜标校,则对相关标定结果的影响约6. 7″,而如果采用标校电视,则对标定结果的影响达12. 8″。
5 结束语
传统坞内标校时,首先用标校望远镜瞄方位标得到以机械轴为基准的方位零位和以标校望远镜光轴为基准的俯仰零位及标校望远镜光轴与机械轴的不平行度(光机偏差),然后用标校电视光轴与标校望远镜光轴的不平行度折算出以标校电视光轴为基准的俯仰零位和光机偏差,最后再通过光电偏差将光轴与电轴联系起来[5]。该方法认为标校望远镜重量轻、光路简单稳定,而标校电视重量重、光路复杂易变。近年来的试验表明:各船载雷达标校望远镜、标校电视光轴均存在不同程度的正、反向晃动,给参数标定精度带来较大误差。
为应对光轴晃动带来的影响,可采用3种方法:一是当标校望远镜光轴不存在晃动,或晃动量很小时,仍然采用传统标校方法,即以标校望远镜光轴为基准的过渡法;二是当标校望远镜存在晃动时,可以直接采用标校电视光轴进行标定;三是如果标校电视光轴也存在晃动时,在俯仰上应先按公式(13)~(15)解算晃动量,再按公式(17)和公式(18)对相关标定参数进行修正。
目前,光轴在方位上的晃动量尚无解算方法,尚需要进一步研究解决。
参考文献:
[1] 康德永,傅敏辉,赵文华.基于恒星测量的船载雷达轴系误差修正参数动态标定[J].电讯技术,2013,53 (7):949-951.
KANG Deyong, FU Minhui, ZHAO Wenhua. Dynamic calibration for shaft parameters of ship-borne radiometer equipment based on star observation[J]. Telecommunication Engineering,2013,53(7):949-951. (in Chinese)
[2] 张立琴,刘庆福.摄影测量在大型雷达天线阵面测量中的应用[J].现代雷达,2015,37(4):77-80.
ZHANG Liqin,LIU Qingfu. Application of photogrammetry in large radar antenna array measurement[J]. Modern Radar,2015,37(7):77-80. (in Chinese)
[3] 江文达,陈道桂.航天测量船[M].北京:国防工业出版社,2002:334-367.
JIANG Wenda,CHEN Daogui. TT&C ship[M] . Beijing:National Defense Industry Press,2002:334 - 367. (in Chinese)
[4] 张同双,李晓勇,钟德安,等.航天测量船无线电测量设备方位零位标校新方法[J].电讯技术,2008,48(6):30-34.
ZHANG Tongshuang,LI Xiaoyong,ZHONG Dean,et al. A new azimuthal zero values calibration method for TT&C ship's radio measuring equipmen[J]. Telecommunication Engineering,2008,48(6):30-34. (in Chinese)
[5] 钟德安,张同双,李晓勇,等.测量船码头动态标校方法研究[J].飞行器测控学报,2010,29(6):20-23.
ZHONG Dean,ZHANG Tongshuang,LI Xiaoyong,et al. Study on dynamic method for instrumentation ship at wharf[J]. Journal of Spacecraft TT&C Technology,2010, 29(6):20-23. (in Chinese)

钟德安(1964—),男,江苏江阴人,1990年获硕士学位,现为研究员,主要研究方向为测量船标校技术;
ZHONG Dean was born in Jiangyin,Jiangsu Province,in 1964. He received the M. S. degree in 1990. He is now a senior engineer of professor. His research concerns calibration techniques for TT&C ship.
Email:Zda1014@126. com
茅永兴(1968—),男,江苏南通人,2005年获硕士学位,现为研究员,主要研究方向航天测控技术;
MAO Yongxing was born in Nantong,Jiangsu Province,in 1968. He received the M. S. degree in 2005. He is now a senior engineer of professor. His research concerns aerospace TT&C technology.
刘 扬(1978—),男,江苏盐城人,2000年获学士学位,现为工程师,主要研究方向为标校、校飞;
LIU Yang was born in Yancheng, Jiangsu Province, in 1978. He received the B. S. degree in 2000. He is now an engineer. His research concerns calibration and flight test.
包 飞(1981—),男,江苏淮安人,2013年获硕士学位,现为工程师,主要研究方向为标校、校飞;
BAO Fei was born in Huai'an,Jiangsu Province,in 1981. He received the M. S. degree in 2013. He is now an engineer. His research concerns calibration and flight test.
冯鸿奎(1971—),男,江苏泰州人,1994年获学士学位,现为高级工程师,主要研究方向为惯性导航技术。
FENG Hongkui was born in Taizhou,Jiangsu Province,in 1971. He received the B. S. degree in 1994. He is now a senior engineer. His research concerns inertial nav igation technology.
简讯
《电讯技术》对来稿插图的要求
针对目前部分来稿插图不完善、不规范的问题,本刊编辑部特提请作者注意以下事项:
(1)插图中英文字母及阿拉伯数字均用“Times New Roman”字体,中文采用6号宋体;
(2)插图中的横、纵坐标一定要有标目,格式为:物理量/单位,且全文中的量应统一,包括大小写、中英文等;
(3)同一坐标轴上的单位应保持一致,横、纵坐标均应有起始点,横、纵坐标的数据精确位数应统一;
(4)物理量的符号用斜体字母标注,尽量避免使用中、英文的文字段(单词或缩写字母)来代替符号;单位符号应使用正体字母标注,量与单位之间用斜线“/”隔开,如f/ Hz,t/ s;
(5)插图的线条应规范、适当,粗线宽度0. 25~0. 70 mm,细线宽度为粗线宽度的1/2;
(6)插图应有图号和图题,图题应有自明性,且不能重复;
(7)正文中一定要有对插图的引用或分析说明,且应在插图之前;
(8)为了提高论文的可读性,文中的仿真图、实物图、复杂坐标图等建议采用彩色图片。
本刊编辑部
Influence of Ship-borne Radar Optical Axis Jitters
on Calibration of Correction Parameters
ZHONG Dean1,2,MAO Yongxing1,2,LIU Yang1,BAO Fei1,FENG Hongkui1
(1. China Satellite Maritime Tracking and Control Department,Jiangyin 214431,China; 2. Joint Laboratory of Ocean-based Flight Vehicle Measurement and Control,Jiangyin 214431,China)
Abstract:Optical axis of calibration telescope and television on ship-borne radar will jitter in different degree along with the antenna state and the amplitude can reach a magnitude of minute. When calibrating radar's zero position and shafting with the reverse method,considerable errors will be produced. So in this paper,a method of judging jitter existing or not is put forward,which detects the not-parallel degree in reverse and positive direction separately between the optical axis of calibration telescope and televisions. In the meantime,the method of calculating optical axis jitters accurately with geodetic results and its model are provided,which meet the precision requirement of calibration. Consequently,the improved data processing model of correlative correction parameters such as pitching zero position,pitching photoelectric deviation and gravity droop error of antenna,etc,is presented while optical axis jittering.
Key words:ship-borne radar;optical axis jitter;parameter calibration;error correction model
doi:10. 3969/ j. issn. 1001-893x. 2016. 02. 005引用格式:于钦添,彭华峰,孙正波,等.利用多转发器直播卫星信号的外辐射源目标探测技术[J].电讯技术,2016,56(2):140-144. [YU Qintian,PENG Huafeng,SHUN Zhengbo,et al. Target detection technology based on signals of multiple transponders on broadcasting satellite [J]. Telecommunication Engineering,2016,56(2):140-144. ]
作者简介:
中图分类号:TN95;V556
文献标志码:A
文章编号:1001-893X(2016)02-0135-05
*收稿日期:2015-11-04;修回日期:2016-01-05 Received date:2015-11-04;Revised date:2016-01-05
猜你喜欢
商(2016年32期)2016-11-24
中国市场(2016年38期)2016-11-15
商(2016年30期)2016-11-09
商(2016年16期)2016-06-12
商(2016年16期)2016-06-12
中国市场(2016年20期)2016-06-12
现代经济信息(2016年9期)2016-05-24
商(2016年4期)2016-03-24