负荷跟踪机械补偿运行策略研究
2016-04-06 07:07:45汤春桃党哈雷
核科学与工程 2016年4期
叶 青,杨 波,汤春桃,党哈雷
(上海核工程研究设计院,上海200233)
负荷跟踪机械补偿运行策略研究
叶 青,杨 波,汤春桃,党哈雷
(上海核工程研究设计院,上海200233)
经济、灵活及与电网匹配的运行控制是先进核电厂的设计目标之一。本文对核电厂典型的控制模式和机械补偿运行控制策略进行了介绍,进一步以机械补偿设计理念为基础,研究分析了其在各种负荷跟踪模式下的运行特性。分析结果表明,采用机械补偿运行策略可实现多种模式下的负荷跟踪运行,并且在绝大部分寿期内可实现URD要求的50%额定功率以上不调硼日间负荷跟踪运行。且在满足功率负荷变化及能量输出需求的前提下,功率峰因子还具有足够的裕量。由此说明机械补偿运行策略可以较大幅度地提升电厂的运行灵活性、经济性以及与电网匹配的适应性。
机械补偿;负荷跟踪;负荷调节
核电厂在基本负荷模式下运行具有最大的经济效益,同时能较为容易地实现电厂的有效控制。目前我国的整个电力市场中核电所占比重很小,可以不参与电网调峰。但是随着核电市场份额的逐渐增大,以及风能等间歇性供电能源的并网,核电厂被要求更多的参与电网调峰,这对核电厂的运行控制方式以及负荷跟踪运行能力提出了更高的要求。在压水堆核电厂发展初期,基于硼的功率调节方式A模式被广泛应用。随着对核电厂负荷跟踪能力要求的提高,采用黑棒和灰棒进行功率控制的G模式被提出。后来,为了对轴向功率分布进行更好的控制,法国提出了X模式。美国用户要求文件(URD,Utility Requirements Document[1])对核电厂的一项要求是:在大部分寿期内可以实现50%额定功率的不调硼负荷跟踪运行。为了适应这一发展趋势,机械补偿运行控制理念被提出。机械补偿是一种主要依靠控制棒进行反应性和功率分布控制的快速精确的先进控制策略,能够提高电厂运行的灵活性和经济性,以满足URD对负荷跟踪运行的要求。
1 核电厂运行控制模式
核电厂功率的改变将引起燃料和慢化剂温度、氙浓度和氙分布,以及轴向功率分布的改变。核电厂应采用合理的运行控制策略补偿堆芯反应性的变化,控制堆芯轴向功率分布在合理的范围之内。目前核电厂运行控制模式主要包括:A模式、G模式、X模式[2]和机械补偿控制模式[3-5]。
1.1 A模式
在压水堆发展初期,核电厂主要以基本负荷模式运行,基于硼的功率调节方式(A模式)被广泛应用。在该模式中,控制棒被同时用于堆芯冷却剂平均温度和轴向功率偏差的控制,化学和容积控制系统通过调节堆芯硼浓度补偿燃料燃耗、氙以及功率变化引起的反应性变化。在负荷跟踪过程中,由于控制棒为黑棒,限值了其插入堆芯的深度,因此其对堆芯反应性的调节能力非常有限,主要还是通过硼浓度的改变实现功率的调节。因此,功率调节速率将受到化学和容积控制系统的限制,且随着燃耗的加深,功率调节能力将大为减弱,产生的废水量也将大幅上升。在负荷跟踪过程中需要频繁调节堆芯硼浓度,不仅会产生大量含硼废水,还极大地增加了操纵员的负担。
1.2 G模式
随着核电市场份额的增加,核电厂需要参与电网调频,因此必须具备快速负荷跟踪能力。快速负荷跟踪的实现必须依靠于控制棒。堆芯功率大范围快速的变化,需要控制棒组较深地插入堆芯。而黑棒较深的插入堆芯将引起功率分布的畸变,从而导致堆芯安全裕量降低至不可接受的程度。G模式采用中子吸收效率较低的灰棒和黑棒补偿快速功率变化引起的反应性变化。正常运行时,堆芯冷却剂温度调节引起的微小反应性变化由主调节棒(黑棒)进行控制。当反应堆功率降低时,堆芯冷却剂温度发生变化,导致轴向功率分布向堆芯上部偏移,而灰棒的插入将使得轴向功率向下偏移,从而实现对轴向功率分布的有效控制。灰棒的引入使得G模式中使用的硼酸量小于A模式。G模式可以较快地实现较大范围的功率调节,减少了废水的产生;有效地实现了功率偏移的控制。但是在降功率和低功率运行过程中,仍然需要调节堆芯硼浓度以补偿氙毒引起的反应性变化,该过程需要操纵员高度关注堆芯状态,并预测反应性变化趋势。反应性控制和轴向功率分布控制未实现独立控制,不易实现堆芯的自动控制。
1.3 X模式
为了提高机组的操作灵活性,并实现对轴向功率偏移更好地加以控制,法国开发了X模式。其采用控制棒控制轴向功率偏差和冷却剂平均温度,同时采用硼酸补偿氙和燃料燃耗引起的慢反应性变化。控制棒轴向位置采用重叠布置方式,X1棒组(灰棒)位于堆芯下半部,X2棒组(黑棒)位于堆芯上半部。两组棒同时移动,以实现对轴向功率偏差的有效控制。在X模式中,所有控制棒组均用于调节冷却剂温度,使得冷却剂平均温度与参考温度的偏差在±0.8℃以内,X1和X2棒组用于控制AO,使得堆芯AO与目标值偏差在±1%以内。
X模式提高了堆芯运行的灵活性,并较大程度地降低了运行过程中废水的产生,同时有效地实现了轴向功率偏移的控制,避免氙振荡的产生。但是,X模式控制相当复杂,而且部分控制棒插在堆芯下半部,增加了燃料轴向燃耗的不规则性。
1.4 机械补偿运行控制策略
机械补偿运行控制策略以常轴向偏移控制方式为基础,采用两种功能独立的控制棒组(M棒组和AO棒组)分别进行堆芯反应性和轴向功率偏移的控制。M棒组采用价值相对较低的灰棒进行堆芯反应性控制,AO棒组采用价值相对较高的黑棒进行堆芯轴向功率部分的控制。核电厂在负荷跟踪运行模式下,灰控制棒组依照一定策略较为精确地控制堆芯慢化剂平均温度,快速补偿因燃料温度、慢化剂温度和氙变化等因素引起的反应性变化。为了避免在反应性控制过程中控制棒的移动对堆芯轴向功率分布造成较大的扰动,灰控制棒组采用了钨作为中子吸收体,以降低控制棒价值,M棒组共布置了四组,以满足在较大范围的负荷跟踪过程中的反应性控制。AO棒组用于自动控制功率变化过程中堆芯轴向通量偏差在所要求的目标值附近,由于AO棒组价值较大,为了避免其对堆芯反应性造成较大的扰动,AO棒组通常插入堆芯较浅。由于堆芯反应性和轴向功率分布分别由M棒组和AO棒组进行独立控制,因此机械补偿运行方式可由棒控系统自动控制。
在负荷跟踪运行中,机械补偿运行控制策略依靠控制棒进行堆芯功率水平和轴向功率分布的自动精确控制,不需要或者很少进行堆芯硼浓度的调节,几乎消除过程中废水的产生,极大地减轻了操纵员的负担。但是该运行模式对堆芯设计和棒控系统设计要求较高,目前国际上还没有机械补偿运行经验。
2 负荷跟踪机械补偿运行研究
为了检验机械补偿运行控制策略对电厂控制的有效性,研究其在负荷跟踪过程中对堆芯核特性的影响,本文对某百万千瓦级核电厂负荷跟踪过程机械补偿运行控制策略进行计算分析。
2.1 模拟的运行模式
根据美国用户要求文件(URD)要求,电厂应具有如下的24h日间负荷循环跟踪的能力:在2h内功率从100%线性下降至50%并在50%功率保持2~10h,再在2h内从50%功率线性增加至100%并在其余时间保持100%功率。此外为了适应多种电网调峰运行要求,充分考虑电厂运行环境的复杂性,核电厂可以考虑如下几种负荷跟踪模式:
(1) 日间阶跃负荷跟踪:电厂在短时间内将功率下降至目标水平,在完成低功率运行后以较快速度恢复至额定功率,该负荷跟踪模式的最大功率变化率为5%RTP/min,该运行模式是衡量电厂快速负荷响应的重要指标。
(2) 负荷调节:通常情况下,电网频率会由于用电负荷的变化产生相对较小但十分快速的波动,为了适应电网这一特性,核电厂应具备快速负荷调节能力。
(3) 周末降功率运行:周末时用电量通常保持在较低水平,为了适应电网要求,电厂应具备在整个周末期间降功率运行,并在新一周开始后平稳恢复到基负荷运行模式的能力。
(4) 连续日间渐变负荷跟踪:电厂在特定情况下实施以天为单位连续的负荷跟踪运行,期间电厂可根据实际需要选择每天的功率变化形式,该运行模式是衡量核电厂连续负荷调节能力的重要指标。
本文采用机械补偿运行策略对某百万千瓦级压水堆核电厂进行了日间负荷渐变跟踪、日间负荷阶跃跟踪模式、日间负荷调节模式、周末降功率运行模式、连续负荷跟踪模式(连续两天)的模拟。
日间负荷渐变跟踪模式考虑了不同的功率变化幅度(70%、50%以及30%额定功率)以及不同的功率变化速率,详细的日间负荷渐变跟踪模式如表1所示。

表1 日间负荷渐变跟踪模式
注:① 即负荷跟踪过程中,在3h内由100%功率降至70%功率,在此功率水平停留6h,之后在3h内回升至100%功率,其余时间均在满功率状态。
日间负荷阶跃跟踪模式考虑了典型的功率变化幅度(50%额定功率),并假设功率变化速率达到了设计最大值(5%RTP/min)。
对于负荷调节模式,本文在模拟时考虑了电网频率波动的随机性,使用随机数产生堆芯波动的功率变化曲线。功率在90%~100%范围内以不超过5%RTP/min的速率变化。
在周末降功率运行模式的模拟中,假定在周末将要开始时堆芯在3h内功率由100%RTP降至50%RTP,并在整个周末期间以50%RTP的低功率运行54h,而后在新一周工作时间将要到来之前,经过3h重新恢复至满功率。
连续日间渐变负荷跟踪模式以某个典型的100-50-100负荷渐变跟踪模式为基础,进行了连续十天的负荷跟踪模拟。
2.2 计算结果分析
图1~图4分别给出了典型的连续日间渐变负荷跟踪运行、日间阶跃负荷跟踪运行、负荷调节运行以及周末降功率运行过程中堆芯重要核特性参数的计算结果。

图1 典型的连续负荷渐变跟踪100-50-100(12-3-6-3)机械补偿运行计算结果Fig. 1 Typical Continuous Power Ramp Load Follow 100-50-100(12-3-6-3)Mechanical Shim Operation Results

图2 典型的负荷阶跃跟踪机械补偿运行模拟计算结果Fig.2 Typical Step Pulse Load Follow Mechanical Shim Operation Results

图3 典型的负荷调节机械补偿运行模拟计算结果Fig.3 Typical Load Regulation Mechanical Shim Operation Results
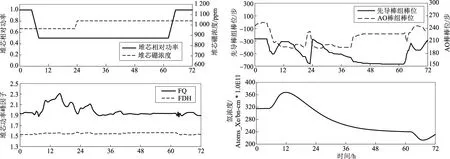
图4 典型的周末降功率机械补偿运行模拟结果Fig.4 Typical Weekend Power Descending Mechanical Shim Operation Results
模拟结果表明,反应堆在进行各种模式的负荷跟踪运行中,堆芯的功率峰因子(如FΔH和FQ)在考虑相应不确定性后均在所要求的设计限值之内,堆芯具有足够的安全裕量。在大部分负荷跟踪运行期间(50%额定功率以上的负荷跟踪模式、日间负荷调节模式、连续负荷跟踪模式),M棒组和AO棒组可始终保持足够的调节能力,将控制参数(如慢化剂平均温度和轴向功率偏移ΔI)维持在较小的范围之内,且不突破插入极限和提升极限,因而无需化容系统投入运行。在部分负荷跟踪模式中(包括某些寿期燃耗30%额定功率负荷跟踪模式、日间负荷阶跃跟踪模式、周末降功率运行模式),由于功率变化速率更快、功率变化范围更大或降功率运行时间更长,导致堆芯的氙瞬态效应很强烈,导致控制棒组无法提供足够的控制能力,此时需要综合运用机械补偿控制策略和化容系统的调硼能力,以实现上述较极限的负荷跟踪模式。但此时所需的调硼次数也仅需1~2次。不同负荷跟踪运行下的调硼情况如表2所示。所有模拟的负荷跟踪运行结果的功率峰因子均在设计限值之内,并有一定的裕量,最低约为5%。

表2 不同负荷跟踪运行下的调硼情况
3 结论与建议
本文对核电厂典型的负荷跟踪运行控制策略进行了简要的比对,并针对机械补偿运行控制策略模拟了各种负荷跟踪运行,研究了相应的堆芯核特性。计算分析结果表明,机械补偿运行控制策略具有强健的堆芯反应性控制能力,可实现多种负荷跟踪运行控制,可大幅提升电厂的运行灵活性以及与电网匹配的适应性。此外,机械补偿运行控制策略可以在大部分寿期内绝大部分情况下的负荷跟踪运行中不调节堆芯可溶硼浓度,可实现完全自动化的负荷跟踪运行,并可大幅减少甚至避免在负荷跟踪运行期间产生含硼废水,对核电厂运行经济性有较大好处。
考虑到机械补偿运行控制策略相对复杂的设计,后续还将从便于核电厂实际运行操作和控制的角度对负荷跟踪机械补偿运行模式开展进一步的研究。
[1] Advanced Light Water Reactor Utility Requirements Document,Volume III ALWR Passive Plant,1999.
[2] Technical and Economic Aspects of Load Following with Nuclear Power Plants,NEA/OECD,2011.
[3] Fausto Franceschini,Bojan Petrovic. Advanced operational strategy for the IRIS reactor:Load follow through mechanical shim(MSHIM)[J]. Nuclear Engineering and Design,2008,238:3240-3252.
[4] Fausto Franceschini,Bojan Petrovic. Core physics analysis of 100% MOX core in IRIS [J]. Annals of Nuclear Energy. 2008,35:1587-1597.
[5] Robert J. Fetterman. AP1000 core design with 50% MOX loading [J]. Annals of Nuclear Energy. 2009,36:324-330.
Load-follow Mechanical Shim Operation Strategy Analysis
YE Qing,YANG Bo,TANG Chun-tao,DANG Ha-lei
(Shanghai nuclear engineering research & design institute,Shanghai 200233,China)
The operation and control strategy with economy,flexibility,and adaptability to match with the grid is the design objective of an advanced nuclear power plant. This paper describes the results of mechanical shim control strategy for various power change profiles based on the mechanical shim design concept. From this study,it is concluded that the mechanical shim operation strategy performs the load-following operation very well over a wide range of scenarios that are expected,and it fulfills the URD requirement that the power change above 50% of the rated power for a 24-hour load cycle can be performed without the soluble boron concentration adjustment during most of the fuel cycle. The power peaking factors have adequate margin. It is found from the results that the mechanical shim operation and control strategy will be robust enough to enhance the flexibility,economy,and adaptability to match with the grid of the nuclear power plant.
Mechanical shim;Load follow;Load regulation
2015-12-30
叶 青(1980—),男,浙江省宁波人,工程师,硕士研究生,现主要从事反应堆工程设计工作
TL36
A
0258-0918(2016)04-0459-06
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:58
设备管理与维修(2022年21期)2022-12-28 07:33:36
中国特种设备安全(2022年1期)2022-04-26 14:15:58
核科学与工程(2021年2期)2021-05-18 10:38:46
现代应用物理(2021年1期)2021-04-16 05:36:54
辐射防护通讯(2019年3期)2019-04-26 05:16:12
中国核电(2017年1期)2017-05-17 06:10:11
核技术(2016年4期)2016-08-22 09:05:32
设备管理与维修(2016年6期)2016-03-16 02:22:08
核科学与工程(2015年3期)2015-09-26 11:58:19