
基于数据驱动的PID自整定方法的研究
2016-04-05 10:02董学平张薛礼合肥工业大学电气与自动化工程学院安徽合肥230009
合肥工业大学学报(自然科学版) 2016年1期
房 耀,董学平,张薛礼(合肥工业大学电气与自动化工程学院,安徽合肥 230009)
基于数据驱动的PID自整定方法的研究
房耀,董学平,张薛礼
(合肥工业大学电气与自动化工程学院,安徽合肥230009)
摘要:传统的PID参数整定依赖于数学模型,通过大量工程实验来确定,这给PID的实际应用带来很大的局限性。文章基于数据驱动理论,提出一种PID参数在线自整定方法,适用于非线性离散系统,该方法无需系统模型的相关信息,且具有PID方法的适应性、抗干扰性、可靠性。通过仿真比较试验结果,验证了这种自适应数据驱动PID参数整定算法的可行性和有效性。
关键词:数据驱动控制;自适应控制;非线性离散系统;PID自整定
董学平(1962-),男,安徽舒城人,博士,合肥工业大学副教授,硕士生导师.
0 引 言
PID是工业过程控制中应用最广泛的控制器之一[1],而传统的PID控制器很难实现对复杂模型的高精度控制[2]。自适应PID算法通过自动辨识被控过程参数,自动整定控制器参数来适应被控系统参数的变化,从而实现对复杂系统的精确控制。自适应PID算法根据参数设计的原理,可大致分为极点配置自适应、相消原理自适应、基于二次型指标的自适应、神经网络自适应、模糊PID自适应[3]。其中,极点配置自适应算法只适用于二阶及二阶以下系统,控制效果的好坏和极点配置的好坏有很大关系;相消原理自适应对系统模型有较高的要求,限制了策略的使用范围;基于二次型指标的自适应,适用于最小相位系统,很难大规模应用;神经网络虽然能够实现PID的最优控制,但是结构和算法都比较复杂;模糊PID算法的模糊化过程和反模糊过程缺乏科学有效的方法,主要靠经验和试凑,限制了算法在实际工程中的应用[2-4]。
数据驱动算法不需要被控系统的模型,只根据系统的输入输出设计控制器[5-6]。然而算法的鲁棒性是建立在基于模型的条件下,对于数据驱动控制器来说,其鲁棒性的说法和定义都是不严谨的[7]。
本文提出的基于数据驱动控制的PID在线自整定策略,用于可控的非线性离散系统中,利用在线和离线的输入输出数据,使算法可以摆脱控制器对模型的依赖,可实现参数的在线自整定。此策略能简单地确定PID 3个参数,且具有快速性和抗干扰性,效果优于常规的增量式PID算法。
1 控制器设计及参数整定算法
1.1问题描述

对非线性SISO数学模型的描述如下:其中,u(k)∈R,y(k)∈R,分别表示k时刻系统的输入和输出;ny、nu为2个未知的正整数;f(…):Rny+nu+2|→R为未知的非线性函数。为此对系统(1)式提出一些假设。
假设1系统(1)式是输入输出可观测的、可控制的,这是对系统可控的最基本要求。
假设2系统(1)式除有限时刻外,f(…)关于第(ny+2)个变量的偏导数是连续的。
假设3系统(1)式满足广义Lipschitz的条件,即对任意的k1≠k2,k1,k2≥0和u(k1)≠u(k2)有:

其中,y(ki+1)=f(y(ki),…,y(ki-ny),u(ki),…,u(ki-nu)),i=1,2;b>0是一个常数。
引理1当非线性系统(1)式满足假设1~假设3,对所有时刻k有Δu(k)≠0成立时,一定存在伪偏导数φ(k),使得:

且|φ(k)|≤b,其中b为一个正常数[8]。
1.2数据驱动控制算法和收敛性分析
设计一个控制器,使得控制器输出跟上系统期望输出,即

根据“使u(k)最优”设计如下的目标函数:

其中,λ>0为一个权重因子;y*(k+1)为期望的输出信号。
将(5)式代入(6)式,对u(k)求偏导,并等于0,可得如下控制算法:
其中,ρ∈(0,1]为步长因子;β=ρφ(k)/(λ+|φ(k)|2)为控制器的一个设计参数。由此只需要求出φ(k),便可以求出系统的设计参数。
由于φ(k)为时变参数,需要根据被控对象的I/O数据来求最优解:

其中,μ>0为权重因子;^φ(k-1)为上一时刻的估计值。
对(10)式求关于φ(k)的极值,可得:其中,η∈(0,1]为加入的步长因子。
算法中λ用来限制输入量的变化Δu(k),在控制系统中被用来保证控制输入信号具有一定的平滑性;适当选取λ可保证被控系统的稳定性并获取较好的输出性能,且能有效避免控制律中的分母为0的情况;ρ、η使算法更具一般性,一般取值接近1,可获得较好的曲线;μ为对φc(k)估计值的惩罚因子[8]。
假设4对任意时刻k和Δu(k)≠0,系统伪偏导数的符号保持不变,满足φ(k)>ε>0或φ(k)<-ε<0,其中ε为一个小正数。
引理2针对非线性系统(1)式,在假设1~假设4的前提下,有系统输出跟踪误差是单调收敛的,且|y*-y(k+1)|=0[8]。
1.3控制器参数自整定算法
增量式PID的表达式为:

其中,kp(k)、ki(k)、kd(k)为k时刻的PID参数。使(12)式与(9)式相等,则有:

为此,假定任意3个连续的采样时刻k-2、k-1、k 的PID参数固定不变,则有:

得到(14)~(16)式的三元一次方程组,即

简写为:

其中

结论1(18)式中矩阵A,若rank(A)=3,则方程组必然存在唯一解P=(A)-1b,就是新的PID参数,而且使得系统能够跟上期望输出。
结论2若rank(A)<3,则系统可能解不存在或者多解。此时不更新PID值,依旧使用上一时刻的PID值。
如此便实现了PID参数的在线自整定。由引理2可知,给定一个有界的输入u(k)可以得到有界的输出y(k),且能够跟上系统期望输出,则此算法是收敛的。
1.4控制器设计的实现步骤
(2)系统初始条件,u(1)=u(2)=0;y(1)=y(2)=0;e(k-4)=e(k-3)=0。
(3)利用(9)式、(11)式和e(k - 2)=u(k-1)+Δu(k)-y(k),求出e(k-2),同理求出e(k-1)。
(4)利用步骤(3)中公式同理求出e(k)。求出A矩阵和b矩阵,若rank(A)=3,则PID参数矩阵P=(A)-1b。若rank(A)<3,则不更新PID参数矩阵;
(5)对步骤(4)进行迭代,更新PID控制器参数。
2 仿真研究
着重对本文提出的基于数据驱动的PID自整定方法进行仿真研究,仿真研究包含2个部分内容:
(1)本文方法的有效性和收敛性研究。
(2)本文方法和增量式PID比较性研究。
这些仿真研究从理论上证明了本算法的优越性和收敛性。
2.1理论证明算法的收敛性和优越性
非线性系统为:
y(i)=0.8y(i-1)-0.5y(i-2)+0.5u(i-1),其中i为正整数。
系统的期望输出为:

则系统仿真图如图1所示,可以看出,基于数据驱动的PID自整定能够在有限的时间内完成收敛,并能跟踪上系统的期望输出,且不会出现较大的超调,能得到比较满意的控制效果。其中步长因子ρ=0.98,η=0.88;仿真权重λ=0.97,μ=0.1。

图1 系统的有效性验证图
2.2本方法与增量式PID方法的对比图
同样,非线性系统为:
其中,i为正整数。在仿真步骤为170时加入幅值为0.1、持续一个采样间隔的干扰脉冲,系统的期望输出为:

则本方法与增量式PID的比较仿真图如图2所示,自整定算法3个参数变化规律如图3所示。
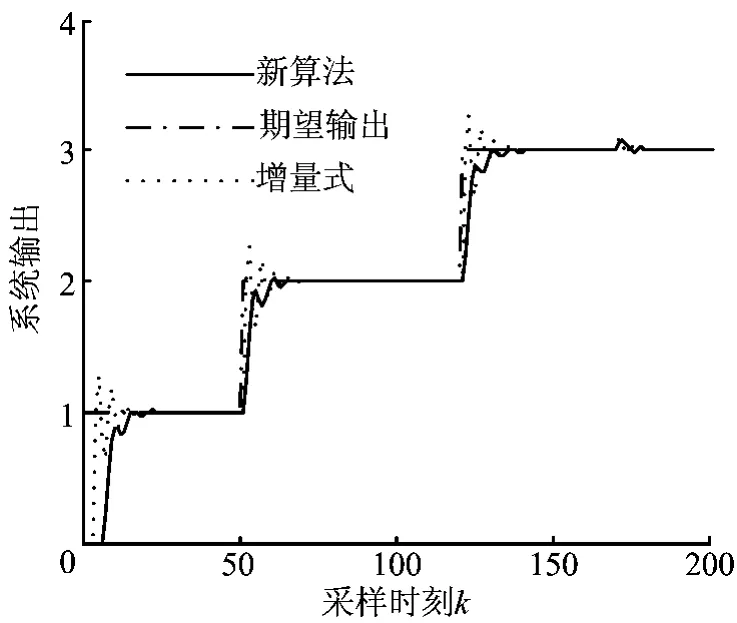
图2 本方法与增量式PID方法的比较仿真结果

图3 自整定PID的参数变化
可以看出本方法的系统跟踪速度比增量式PID更快(误差在5%内认为跟上)。当期望输出变化时,自整定系统跟踪偏差较大,PID 3个参数迅速变化,保证了跟踪曲线的快速性和平滑性;系统跟踪偏差变小,kp、kd相应变化,ki减小并趋于0;最终系统进入稳态时,PID 3个参数保持不变。由于快速性和超调是一对不可调和的矛盾,所以只能保证快速性的同时,尽量保证跟踪曲线不超调。当加入干扰,系统输出紧跟期望输出,PID 3个参数略微调整重新进入稳态。控制器不用通过大量工程整定试验便能得到系统的PID参数,算法和结构简单,可通过系统本身的自学习、自整定,可以有效地解决PID参数难以确定的缺点,并具有一定的抗干扰能力。其中增量式PID的3个参数kp=0.7,ki=1.15,kd=0.2。
3 结束语
本文提出的一种基于数据驱动的PID在线自整定控制策略,其基本思路就是利用系统的期望输入输出计算出此时PID的最优解。此方法有如下优点:①系统响应速度较快;②系统参数整定简单;③系统具有抗干扰性;④系统对于模型的非依赖性。除此之外,本算法不需要通过大量的整定试验来确定PID参数,只需要系统通过自身调整。特别对于复杂系统,当系统参数发生变化导致系统模型变化时,普通的PID很难通过抗干扰性来跟踪系统的输出,而本方法可动态调整PID参数来达到控制系统的设计要求。
[参考文献]
[1]黄友锐,曲立国.PID控制器参数整定与实现[M].北京:科学出版社,2010:6-100.
[2]孟祥泉.PID自整定方法与控制器研制[D].大连:大连理工大学,2010.
[3]赵国山,仇性启.自适应PID的发展概况[J].化工自动化及仪表,2006,3(38):1-5.
[4]葛锁良,杨旭玮,张亚东.RBF网络自整定PID控制在网络化控制系统中的应用[J].合肥工业大学学报:自然科学版,2011,34(10):1489-1491,1550.
[5]王卫红,侯忠生,霍海波.基于数据驱动方法的控制器设计及其参数整定[J].系统科学与数学,2010,30(6):792-805.
[6]Leandro S C,Marcelo W P,Sumar R R,et al.Model-free adaptive control design using evolutionary-neural compensator[J].Expert Systems with Applications,2010,37(1):499-508.
[7]侯忠生,许建新.数据驱动控制理论及方法的回顾和展望[J].自动化学报,2009,35(6):650-667.
[8]侯忠生,金尚泰.无模型自适应控制:理论与应用[M].北京:科学出版社,2013:23-150.
(责任编辑马国锋)
Research on PID parameter self-tuning based on data-driven control
FANG Yao,DONG Xue-ping,ZHANG Xue-li
(School of Electric Engineering and Automation,Hefei University of Technology,Hefei 230009,China)
Abstract:The traditional PID parameter tuning depends on mathematical model,but also needs a large number of engineering experiments to ensure parameter,which has limited the practical application of PID severely.In this paper,an online PID parameter self-tuning method is proposed based on data-driven control,which has the advantages of strong adaptability,anti-interference,and reliability,and can solve the problem of the dependence of model and realize the online PID parameter self-tuning in discrete nonlinear system.And the feasibility and effectiveness of the proposed PID parameter self-tuning algorithm based on data-driven control are verified by comparative simulation tests.
Key words:data-driven control;adaptive control;discrete nonlinear system;PID self-tuning
作者简介:房耀(1990-),男,安徽亳州人,合肥工业大学硕士生;
基金项目:合肥工业大学产学研校企合作资助项目(H-037)
收稿日期:2014-12-29;修回日期:2015-04-07
Doi:10.3969/j.issn.1003-5060.2016.01.009
中图分类号:TP 273.2
文献标识码:A
文章编号:1003-5060(2016)01-0046-04
