
一种新型仿生蜘蛛机器人行走机构的设计研究
2016-04-05 01:58梁忠正陈玉娟沈家润陈宇航
现代制造技术与装备 2016年9期
梁忠正 陈玉娟 沈家润 骆 淳 陈宇航
(上海师范大学 信息与机电工程学院,上海 201418)
一种新型仿生蜘蛛机器人行走机构的设计研究
梁忠正 陈玉娟 沈家润 骆 淳 陈宇航
(上海师范大学 信息与机电工程学院,上海 201418)
本文运用真空吸附技术设计了一种能够运用6足稳定,实现行走、转弯、爬墙、避障的新型仿生蜘蛛机器人。
蜘蛛机器人 真空吸附 行走机构 爬墙 避障
引言
仿生蜘蛛机器人是对蜘蛛形状、运动原理和行为方式等进行模仿,相比履带式或轮式机器人,仿生蜘蛛机器人存在结构上的不足。履带式机器人有更大的抓地面积,即使在一些坡度较陡的路面,履带式机器人也能顺利爬行,而蜘蛛机器人由于行走方式的不同,不能像履带式那样表现出色。
针对仿生蜘蛛机器人的这种缺点,采用不受地面材料限制的真空吸附法,给出了一种新型机器人的改进设计方案。该设计方案在功能结构上既保留了蜘蛛仿生机器人环境适应能力强、运动灵活的特点,又克服了其攀爬陡坡时的缺点,且实验测试效果良好。
1 新型仿生蜘蛛机器人的总体结构方案
新型仿生蜘蛛机器人的结构设计如图1所示。机器人本体是一个圆柱形结构,底盘为上下两层结构,电子硬件安装在下层底盘,感受器安装在上层底盘,机器人的核心部件都在两底板之间,保护效果很好。

图1 新型仿生蜘蛛机器人的结构设计简图
躯干部分:考虑到机器人躯干部位对灵活度基本没有要求,无需搭建活动关节,且躯干不宜受到关节活动干扰,采用加工六边形铝合金作为底盘,既减轻了重量,又利于支撑及保护内部装置。控制器采用arduino足,以满足机器人运算要求。
头部:在机器人上层底盘上安装采用激光扫描雷达作为主感受器,用于识别物体与避障,构成机器人的头部。
四肢:机器人的6条腿均匀安装在两层底板之间,机器人行走时依靠两两间隔的3条腿构成稳定的三角形支撑地板。每只腿设计有3个自由度——腰、髋、膝关节,实现前、后、左、右、上、下的三维活动空间。腰关节和髋关节轴线互相垂直,膝关节轴线和髋关节轴线互相平行。呈圆周对称分布的6条腿,分别分布在本体四周呈正六边形结构,使六腿机器人可以实现更多的前进方向和零半径转弯。整机共有18个主动关节,选取18个舵机充当肢体关节。在每条腿部触角部分别安装三个硬质吸盘,将吸盘与真空泵通过气管联通。机器人腿部示意如图2所示。
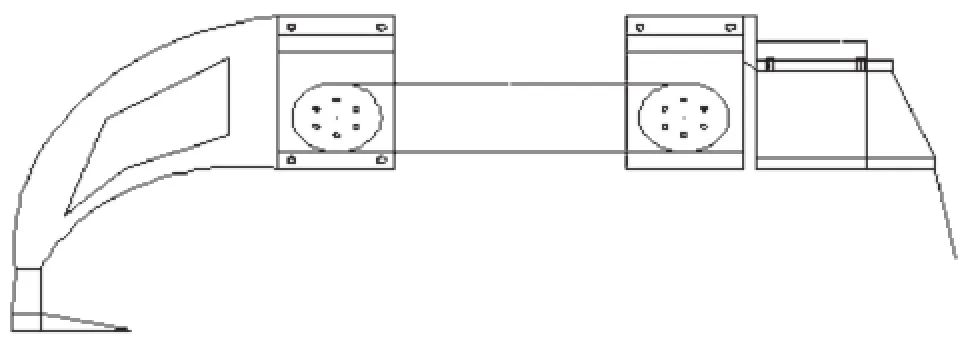
图2 机器人腿部设计简图
2 行走机构设计
相比较在平地上移动,机器人在垂直墙壁上移动需要克服更多的困难。本文以后者为例,分析其行走机构设计方案。在六足触角处各安装三只硬质吸盘,在中央主体处安置真空泵,运用真空吸附原理使空气泵控制硬质吸盘内气压,落地时使吸盘内气压远小于大气压强,使机器人稳定在陡坡或垂直墙面上,而抬腿时使吸盘内气压与大气压相同,使腿部自由活动,以此往复运动达到在陡坡或墙壁上运动的目的。
采用多吸盘结构形式,可以增大吸附力,避免当地面凸凹不平时因为单个吸盘漏气而出现吸附力下降、承载能力降低的情况,提高了吸附结构的可靠性。
由于机器人在运动过程中吸盘与壁面总是不发生相对移动,所以可以将机器人吸附时的状态按静态进行分析。每组吸盘均由3个吸盘呈等边三角形构成。由于直接计算比较复杂,且计算时的精度要求不高,故可化简为一个吸盘,其面积与三个吸盘大小相等。该等效吸盘的中心位于原3个吸盘构成的三角形中心。机器人运动时的平衡状态受力如图3所示。
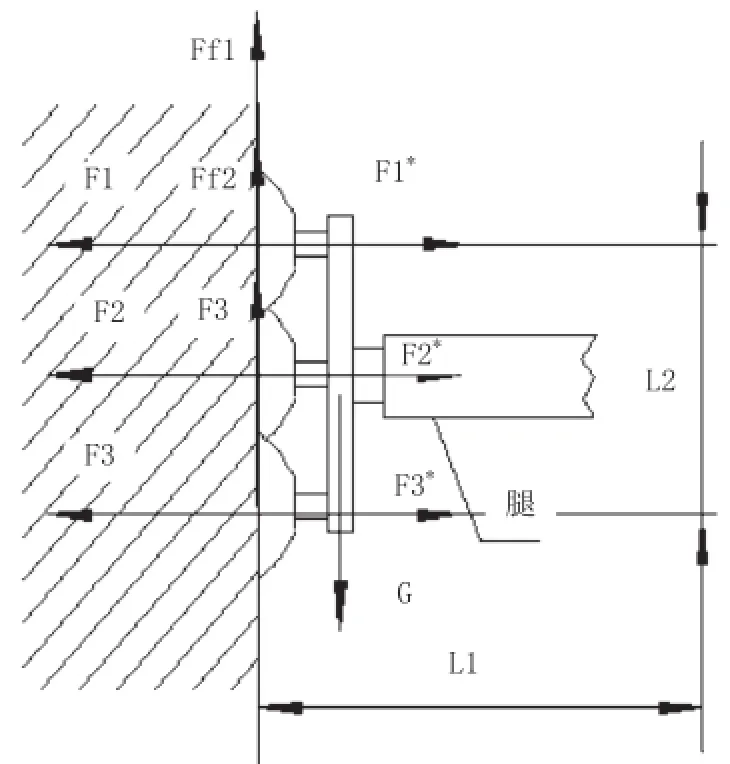
图3 机器人平衡状态受力图
其中,U为吸盘与玻璃壁面之间的摩擦系数,G为机器人自身重力(N),F1、F2、F3分别为吸盘1、2、3的吸附力(N),F1*、F2*、F3*分别为玻璃对吸盘1、2、3的反作用力(N),Ff1、Ff2、Ff3分别为吸盘l、2、3和工作面之间的摩擦力(N)。
选取硬质橡胶作为吸盘材料,由于工作表面是复杂地形,工作过程中由于各种情况的作用工作表面会变湿,摩擦系数降低0.1~0.4。出于安全考虑,假设降低0.4,摩擦系数为μ=0.5×(1-0.4)=0.3。

若吸盘内相对于外界压力为P,吸盘1和2的面积均为S,则要使机器人不会因重力下滑,则F1>0,F2>0,F3>0,Ff1+Ff1+Ff1>G。
以第一个吸盘与玻璃交界处为原点,列力矩方程为

吸盘要在倾覆力矩的作用下保持不脱落,必须满足1*0F>。
综上,得:

将G=180N,L1=100mm,L2=600mm代入上式,得F1≈233N。
从结构可看出,对机器人本体的可靠吸附影响最大的是在重力作用下的下滑力,也就是说每组处于吸附状态的吸盘要能产生233N的真空吸附力,才能保证机器人在重力作用下不下滑。每个吸盘组有三个吸盘,这样每个吸盘上只需要负担77.7N的力。
根据计算选取直径为40mm的吸盘就可以完全满足需要。考虑到布局的紧凑性和吸附稳定性,吸盘选用等边三角形布局。
将机器人的六条腿简化分成红蓝两组,1、3、5为蓝组,2、4、6为红组,每组的三条腿的连线构成一个三角形,机器人在静止状态下的腿部摆放如图4所示。图5为机器人腿部的初始状态。当机器人准备行进时,采用红蓝两组交替前进的方法。准备行进时,红组腿部不动,保持机器人稳定,蓝组腿部执行前进命令,达到如图6所示的状态。而后,蓝组腿部不动,保持机器人稳定,红组腿部执行前进命令,达到图7所示状态。循环图5、图6、图7运动状态,以此类推达到前进目的。
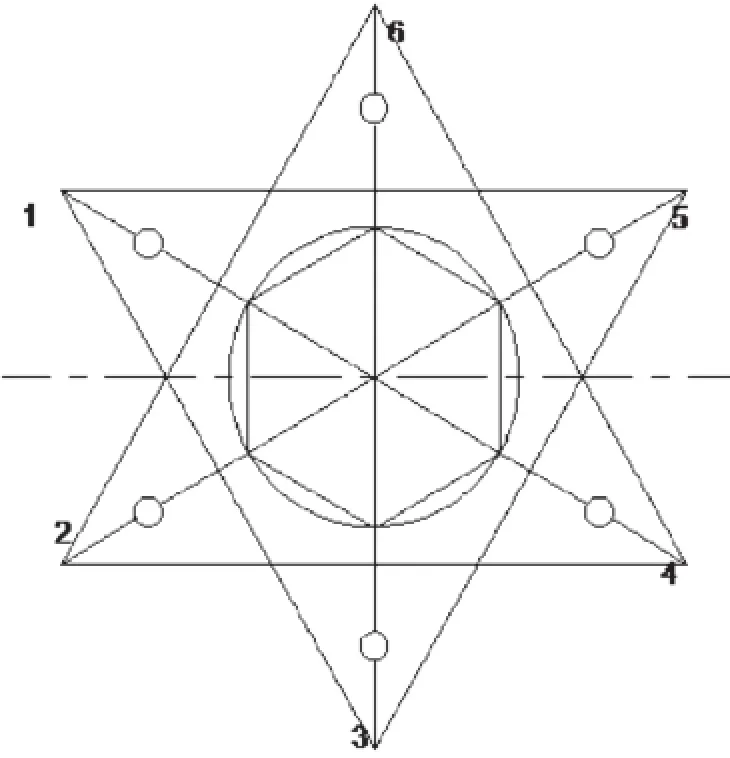
图4 机器人六肢展开简图
图5 行走准备阶段

图6 行走第一阶
图7 行走第二阶段
3 感觉机构设计
设计蜘蛛机器人的感官系统时,机器人采用激光测距实现障碍物绕行,在机器人本体安装1对激光扫描雷达。
在上层铝合金圆板边缘上安装一个激光扫描雷达,也就是机器人的头部在垂直方向下层底板上,同样安装一个激光扫描雷达。
4 程序设计
控制系统设计主要包含避障与爬坡两部分,上下两个激光测距仪通过测量差值判断是否为障碍。如果上下感受器测出的差值小于3厘米,则判断前方为障碍,则自动选择测出距离最长处前进。如果上下感受器测出差值大于3厘米,则判断前方障碍为陡坡,并立即在控制器内模拟陡坡,开启真空泵,运用真空吸附技术爬坡。过程中,激光测距仪不断向控制器传回数据,完成避障与爬坡,从而顺利到达目的地。
5 实验效果
实验表明,样机机构合理,具备一定的攀爬能力和对障碍物的判断能力。
以下是实验的具体内容。
实验条件:
(1)自制实验壁面:按照真实壁面结构组建,壁面倾角0°~90°可调。
(2)自制复杂地形沙盘:按照洞穴崎岖面组建,多障碍且路面不平齐。
实验设备:
(1)六足仿生机器人样机一台;
(2)笔记本电脑一台;
(3)控制盒;
(4)电源;
(5)电源线和总线通讯线。
实验过程:
在垂直墙面条件下,测得机器人运动参数:90°壁面垂直方向最大移动速度为10cm/s。
在水平自制复杂地形沙盘条件下,测得机器人运动参数:通过全长1米的沙盘所需时间7s;障碍物识别率:70%。
6 结束语
通过对仿生蜘蛛机器人的改进,研究了携带真空泵及硬质吸盘的新型仿生蜘蛛机器人。该机器人通过实验达到了在陡坡上行走的目的,克服了仿生蜘蛛机器人无法爬陡坡上的缺点。
设计的新型仿生蜘蛛机器人实现了攀爬陡坡及垂直墙壁的功能,不仅可以在崎岖的路上平稳前行,也能在陡坡上爬行。所以,新型仿生蜘蛛机器人的设计与实现,具有较高的研究价值和实际意义。
[1]施文灶,王平.仿生蜘蛛机器人的设计与实现[J].电子科技,2013,(3):90-93.
[2]于欣龙.六足仿蜘蛛机器人样机研制及步行机理研究[D].哈尔滨:哈尔滨工程大学,2013.
[3]罗庆红,韩宝玲.现代仿生机器人设计[M].北京:电子工业出版社,2008.
[4]日本机器人学会.机器人技术手册[M].北京:科学出版社,
2008.
[5]琼斯.机器人编程技术[M].北京:机械工业出版社,2006.
[6]徐兵.机械装配技术[M].北京:中国轻工业出版社,2005.
[7]陈学东.多足步行机器人运动规划与控制[M].武汉:华中科技大学出版社,2006.
[8]John Blankenship.机器人编程设计与实现[M].北京:科学出版社,2010.
[9]田静眉.真空吸附式壁面清洁机器人结构设计与研究[D].成都:西南交通大学,2013.
[10]徐坤,郑羿,丁希仑.六轮腿式机器人结构设计与运动模式分析[J].中国北京航空航天大学学报,2016,(1):59-71.
[11]杨壮凌,李春起,卢旭锦,王佳龙.具有救援工作模拟功能的仿生机器人的研制[J].机电工程技术,2011,40(5):58-60.
Design and Research of a New Kind of Walking Mechanism of Bionic Spider Robot
LIANG Zhongzheng, CHEN Yujuan, SHEN Jiarun, LUO Chun, CHEN Yuhang
(School of information and electrical engineering, Shanghai Normal University, Shanghai 201418)
This article use vacuum absorption technique to design a new type of simulate spider robot which can use 6 feet to make working, turning, climbing and obstacle avoiding come true.
robot, vacuum adsorption, climbing, obstacle avoidance
上海市大学生创新活动计划项目(201610270088)。
猜你喜欢
玩具世界(2022年2期)2022-06-15
汽车实用技术(2022年7期)2022-04-20
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
山东交通科技(2020年1期)2020-07-24
现代营销·理论(2019年10期)2019-09-10
机电工程技术(2018年11期)2018-12-03
中南大学学报(自然科学版)(2016年2期)2017-01-19
中国水能及电气化(2016年11期)2016-02-28
恋爱婚姻家庭(2015年27期)2015-12-19
