增程式电动汽车的动力参数匹配与性能仿真
2016-03-28 10:22:13周亚洲牛礼民杨洪源
安徽工业大学学报(自然科学版) 2016年4期
周亚洲,牛礼民,杨洪源,尹 然
(安徽工业大学机械工程学院,安徽马鞍山243032)
增程式电动汽车的动力参数匹配与性能仿真
周亚洲,牛礼民,杨洪源,尹 然
(安徽工业大学机械工程学院,安徽马鞍山243032)
为将一款纯电动汽车改装为增程式电动汽车,通过对増程器工作模式和原理的分析,对増程器的发动机与发电机参数进行匹配,得出合理的设计参数。结合MATLAB/Simulink与ADVISOR软件平台对改装前后的整车在相同循环工况(CYC_UDDS)下进行对比仿真分析。结果显示,改装后的增程式电动汽车续驶里程达177.8 km,且整车的动力性能与燃油经济性控制在合理的范围内,表明文中所提纯电动汽车改装方案是可行、有效的,为后续实车改造和整车路试实验提供参考依据。
增程式;续驶里程;参数匹配;仿真分析
能源危机和环境污染问题愈发突出,致使能源消耗较大的汽车行业的发展日益受到限制,因此开发新能源汽车已成为各国汽车公司的共识。其中纯电动电车以零排放、低噪声、结构简单等优点获得了大众的青睐,但受到动力电池技术的限制,其难以达到传统燃油汽车的续驶里程,且一般的纯电动汽车成本较高,导致其难以较快发展与普及。作为纯电动汽车的一种较低成本的替代方案,增程式电动汽车是目前最有实际应用前途的车型,也是纯电动汽车的平稳过渡车型[1]。
目前,国内外学者对增程式电动汽车及相关技术进行了深入研究。Matt等[2]在某型增程式电动汽车的基础上,通过加装氢气和普通燃油的双能源发电系统(Dual-Power Generation System)对其进行改造,使该型增程式电动汽车的续驶里程得到了很大提升;赵世靖等[3]针对传统增程式电动汽车提出了一种新型双轴传动系统,在满足动力性与经济性的要求下,对该系统进行了参数匹配,MATLAB分析表明,该新型传动方案能够显著提高原型车性能;申彩英等[4]在分析驾驶员驾驶习惯的基础上,以满足相关性能指标为设计目标,对增程式电动汽车参数进行匹配,CRUISE软件仿真结果表明,设计的增程式电动汽车满足性能要求。综上,国内外学者针对增程式电动汽车的研究主要集中在动力结构及参数匹配上,以优化燃油经济性、提高整车动力性能与续驶里程为目的。
本文以满足整车动力性能并提高续驶里程为目标,从工程实践出发,对纯电动汽车原型车进行加装増程器的改装,并采用MATLAB/Simulink和ADVISOR两款软件对纯电动原型车与改造后的增程式电动汽车分别进行动力性能、续驶里程性能联合仿真实验,以验证将纯电动汽车改造成为增程式电动汽车的方案可行性。
1 增程式电动汽车的结构与原理
增程式电动汽车(Extended Range Electric Vehicle,EREV)是一种将发电与充电两种过程结合在一起的新型电动汽车,基本结构如图1。汽车内部配有小功率发动机,并且与发电机串联集成在一起共同组成増程器,起到发电并向动力电池充电的作用。EREV在行驶时,可以在纯电动驱动与增程驱动2种工作模式[5]下切换运行,模式切换的依据是蓄电池的荷电状态(State of Charge,SOC)阈值。
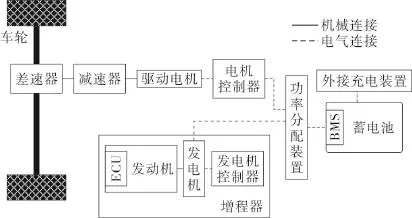
图1 增程式电动汽车基本结构Fig.1 Basic structure of EREV
増程器的工作模式见表1。在纯电动模式下,蓄电池的SOC值在设定的正常范围内,运行模式如图2。此时增程式电动汽车与普通纯电动汽车运行原理基本相同,増程器不工作,蓄电池向驱动电机供电,电机产生的动力经减速器传递至车轮,驱动车辆行驶。

表1 増程器的工作模式Tab.1 Working patterns of range extender
在增程模式下,蓄电池的SOC值低于设定的最低阈值,运行模式如图3。此时増程器的发动机控制单元(Engine Control Unit,ECU)控制发动机启动并运行在最佳状况,使发电机发电,产生的电能首先进入功率分配装置,一部分供给电机,驱动车辆行驶,多余的电能储存在蓄电池中,并且当车辆停止时,可以利用市电为蓄电池充电。

图2 纯电动驱动运行模式Fig.2 Operation pattern of pure electric drive
与纯电动汽车相比,增程式电动汽车的整车续驶里程得到了较大提升,可以随时在加油站加油。由于增程式电动汽车发动机功率较小,其排放及燃油经济性等指标均优于传统统燃油汽车,长距离行驶油耗比较低,大部分情况下发动机不启动,噪声小。相较于纯电动汽车的放电深度(Depth of Discharge,DOD),增程式电动汽车可以浅度充放电,延长了蓄电池的使用寿命[6]。
2 増程器参数匹配
文中选用的原型车为众泰公司的知豆E20纯电动汽车,整体外观见图4,基本参数见表2,改装后的性能要求见表3。
増程器的参数匹配是进行改装的重要环节之一,只有进行正确、合理的参数匹配与选型,才能使改装后增程式电动汽车满足动力性及续航里程的要求。増程器的参数匹配包括发动机参数匹配和发电机参数匹配,当整车需求功率较小时,发动机关闭,由蓄电池驱动电机;当整车需求功率较大时,如爬坡、加速时,由发动机和蓄电池共同驱动电机,满足整车的功率需求[7−9]。
増程器发动机功率的选择对于整车设计尤为重要,汽车的加速性能和爬坡性能可以由汽车的最高车速来体现。因此常根据汽车的最高车速来初步选择发动机的功率,此时理论设计功率[7]应满足

式中:PR是发动机理论设计功率;ηt是传动系统效率;m是汽车质量;g是重力加速度,取9.81 m/s2;f是滚动阻力系数;vmax是汽车最高车速;CD是风阻系数;A是汽车的迎风面积。式中各参数取值见表2,经计算得到増程器发动机的理论设计功率PR=6.59 kW。
发动机的实际功率应大于理论设计功率6.59 kW,以满足一定的冗余功率需求,如电路负载、车内灯光、空调等,这里选用的増程器发动机为四冲程双缸汽油机。则増程器的发动机参数为:功率10 kW,转速5 000 r/min,排量0.17 L。
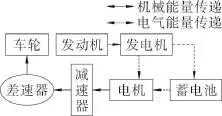
图3 增程驱动运行模式Fig.3 Operation pattern of extended range drive

图4 原型纯电动汽车整体外观Fig.4 Appearance of the pure electric vehicle
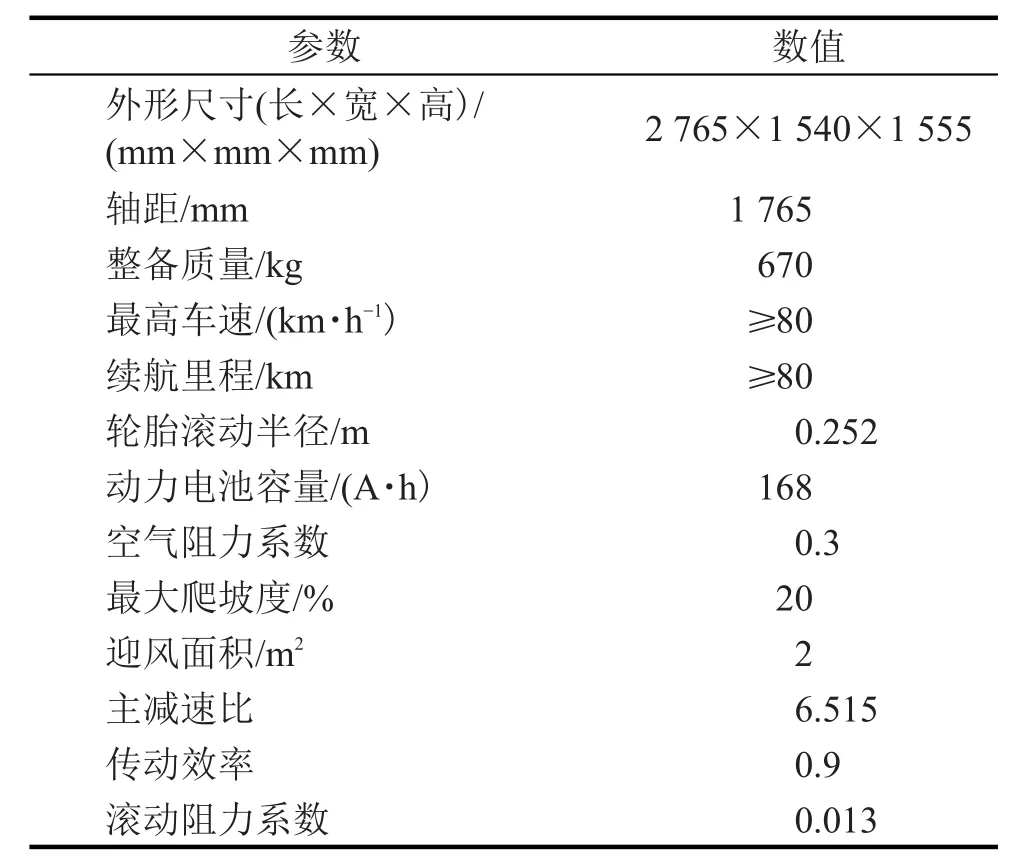
表2 整车基本参数Tab.2 Basic parameters of prototype vehicle
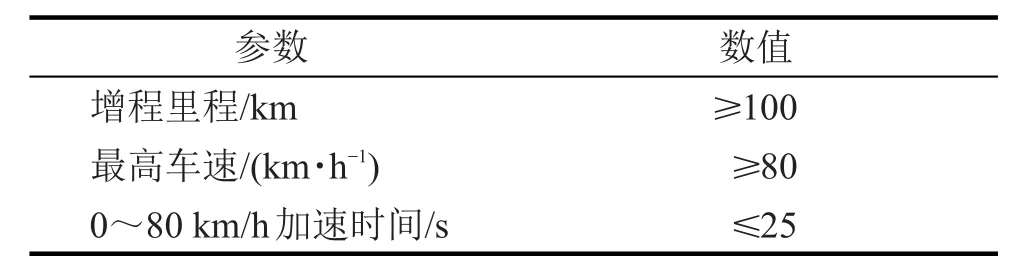
表3 改装后增程式电动汽车性能要求Tab.3 Performance requirements of the modified EREV
根据所选的发动机燃油消耗Map图[8],可以计算出满足增程式电动车续驶里程所需要的油箱容积,为

式中:S为增程里程,取100 km;fg为发动机高效工作点处的油耗,取150 g·kW-1·h-1;Pg为发动机高效点处的功率,为5.09 kW;va为匀速行驶车速,取40 km/h;ρ为燃油密度,取0.737 g/mL;η为发动机油电转换效率,取0.8,计算得V=3.2 L。
对于与发动机直接相连的发电机参数匹配设计,应考虑到电机与蓄电池的具体参数。表4,5分别是原型纯电动汽车的电机(直流永磁同步电机)性能参数与蓄电池的相关参数。
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有高效、高控制精度、高转矩密度、良好的转矩平稳性及低振动低噪声的特点,转子为永磁体,效率高、功率密度大,在电动汽车中的应用范围广,故増程器的发电机采用永磁同步电机[9],发电机的理论设计功率PG满足下式

其中ηm是电机效率,这里取ηm=0.9。计算得PG=7.3 kW,此处取发电机输出功率7.5 kW,额定输出电压为12 V,最大转速为5 000 r/min。
综上,匹配后増程器的参数:发动机功率10 kW,转速5 000 r/min,排量0.17 L,油箱容积3.2 L;发电机额定功率7.5 W,额定输出电压72 V,最大转速5 000 r/min。
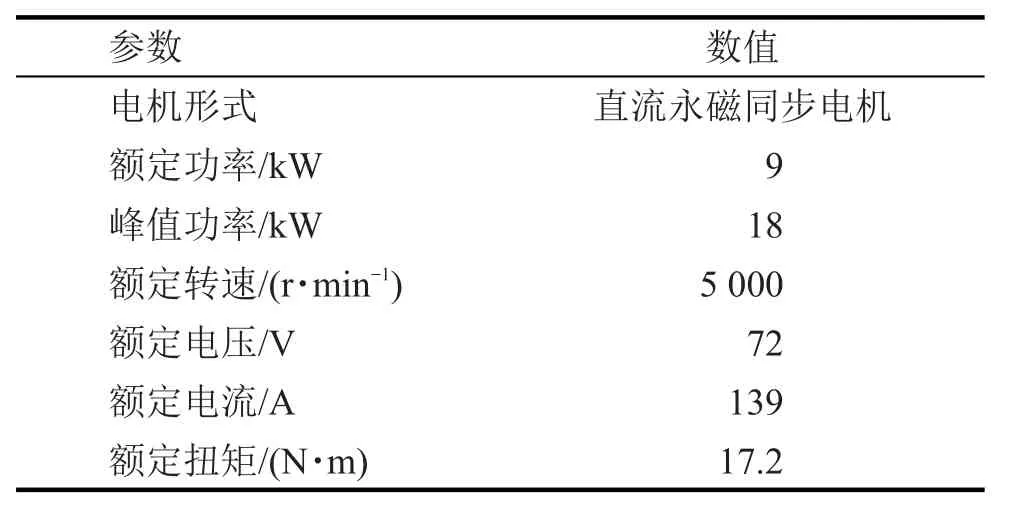
表4 电机性能参数Tab.4 Performance parameters of motor
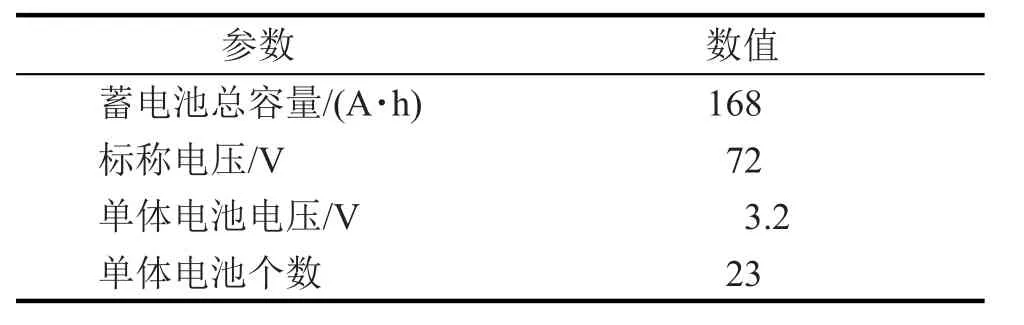
表5 蓄电池性能参数Tab.5 Performance parameters of battery
3 仿真与分析
采用MATLAB/Simulink和ADVISOR(Advanced VehIcle SimulatOR)软件对原型纯电动汽车及增程式电动汽车进行联合仿真,对2种不同配置车型的动力性能和续航里程进行验证,分析加装増程器对电动汽车性能的影响。
3.1 仿真参数设定
在ADVISOR中已有的车辆部件模型参数与所需的部件参数不同,故需对不同部件变量参数的M文件进行定义与修改。根据前述的整车及部件参数,需修改的部件主要有Vehicle(车辆)部件,Energy Storage(蓄电池)部件,Motor(电机)及电机控制器部件和Transmission(变速器)部件等。
在ADVISOR中并没有增程式电动汽车的整车模型,考虑到串联式混合动力汽车基本传动结构与增程式电动汽车基本相同,因此在增程式电动汽车的整车参数输入界面将Drivetrain Config传动系配置中选择series车型。整车及部件参数变量的具体设置与纯电动汽车的设置相同。
3.2 动力性能与续驶里程仿真
3.2.1 动力性能
对纯电动汽车基本车辆部件变量参数设定结束后,进入仿真参数设定界面。这里采用CYC_UDDS(Urban Dynamometer Driving Schedule)美国城市驱动循环工况,如图5。仿真总时间是1 369 s,行驶距离为11.99 km,最大车速为91.25 km/h,平均车速为31.51 km/ h,行驶期间的停车次数为17次,设定循环工况重复次数为10次进行仿真。为测试纯电动汽车的加速性能,同时勾选Acceleration Test加速性能测试,进入加速测试仿真选项,选定0~80 km/h的加速性能测试,仿真结果如图6。
在10次CYC_UDDS标准循环工况下,纯电动汽车的续驶里程达到81.5 km,0~80 km/h的加速时间为18.9 s,最高车速约90 km/h。同时对比图6(a),(b)可以发现,在汽车进行加速及高速行驶时,蓄电池的SOC下降较快,仿真结果基本符合已知的原型纯电动汽车的基本性能指标。
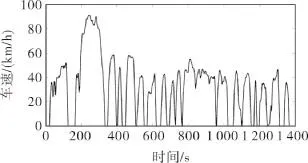
图5 CYC_UDDS行驶工况Fig.5 Running condition of CYC_UDDS
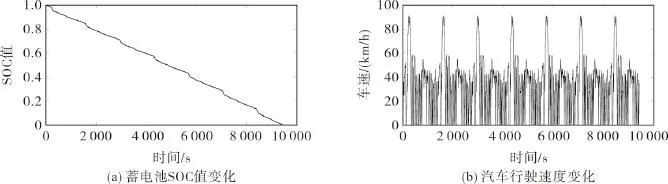
图6 纯电动汽车在CYC_UDDS工况下的仿真结果Fig.6 Simulation results of electric vehicle under CYC_UDDS
对加装増程器改装之后的增程式电动汽车,同样采用CYC_UDDS标准循环工况,设定循环工况重复次数为2次进行仿真。为测试改装之后的增程式电动汽车的加速性能是否满足设计要求,勾选Acceleration Test加速性能测试,进入加速测试仿真选项,选定0~80 km/h的加速性能测试,仿真结果如图7。

图7 增程式电动汽车在CYC_UDDS工况下的仿真结果Fig.7 Simulation results of EREV under CYC_UDDS
在2次CYC_UDDS标准循环工况下,增程式电动汽车行驶了24 km,最高车速约90 km/h,0~80 km/h的加速时间为21.7 s。在仿真中设定蓄电池SOC值变化范围为0.4~0.7。对比图7(a),(b),(c)可以发现,在汽车加速或高速运行时,SOC值下降较快,在SOC值低于设定的0.4时,増程器发动机启动,带动发电机进行发电,一部分电能用于电机驱动车辆行驶,多余部分用于给蓄电池充电,致使SOC值上升。对应地,在470 s左右时,由于发动机刚刚起动,燃油消耗不充分,导致尾气排放量急剧上升,之后发动机工作在高效区,发动机的排放性能处在一个正常的范围之内,如图7(d)所示为发动机的转速-转矩特性曲线。
3.2.2 续驶里程
为验证改装后增程式电动汽车的增程效果,建立等速40 km/h的匀速循环工况(CYC_CONSTANT45),设定循环工况重复次数为250次进行仿真。
在等速循环工况下,蓄电池初始SOC值均为0.7,纯电动汽车续驶里程是71.9 km;增程式电动汽车每100 km油耗为1.8 L,总计行驶距离是138.9 km。由此可见,改装后的增程式电动汽车在消耗3.2 L燃料后,总的续驶里程达到177.8 km,增程里程约106 km,满足设计要求。
3.2.3 仿真结果对比分析
综合纯电动汽车与增程式电动汽车的动力性能与续驶里程仿真结果,可以得到:纯电动汽车的续驶里程为71.9 km,0~80 km/h的加速时间为18.9 s,最高车速约90 km/h;增程式电动汽车的总续驶里程为177.8 km,0~80 km/h的加速时间为21.7 s,最高车速约90 km/h。改装后增程式电动汽车的动力性能仍然保持在合理的范围内,满足动力性能要求,且在CYC_UDDS标准循环工况下,增程式电动汽车的油耗每100 km为3.2 L,其燃油消耗量与同等排量的传统燃油汽车相比下降约50%[12],节油效果明显;在CYC_CONSTANT45等速工况下,增程式电动汽车的177.8 km的续驶里程相较纯电动汽车的71.9 km的续驶里程有了明显的提升,表明纯电动汽车加装増程器的改造能够明显提升汽车自身的续驶里程,并且整车的动力性能与燃油经济性仍然能够保持在一个合理的范围内,因此方案是可行、有效的。
4 结 论
将某款纯电动汽车改装为増程器电动汽车,对其増程器的发动机与电机参数进行匹配,MATLAB/ ADVISOR软件联合仿真结果表明,增程式电动汽车相较纯电动汽车在CYC_CONSTANT45工况下的续驶里程增加了约106 km,油耗每100 km为3.2 L,0~80 km/h的加速时间为21.7 s,整车的动力性与续驶里程均满足设计要求。这些结果表明将纯电动汽车改造成增程式电动汽车的方案是可行、有效的,并为实车改造实验提供了参考依据,具有一定的工程应用意义。
[1]崔胜民.新能源汽车技术[M].北京:北京大学出版社,2014:212-217.
[2]MATT V W,REMON P.Development of a dual-fuel power generation system for an extended range plug-in hybrid electricvehicle [J].IEEE Transaction on Industrial Electronics,2010,57(2):641-648.
[3]赵世靖,毕长飞.基于新型双轴传动系统的增程式电动汽车参数匹配研究[J].机械传动,2015,40(1):44-47.
[4]申彩英,王婷,胥帆.基于驾驶员驾驶习惯的增程式电动汽车参数匹配研究[J].现代车用动力,2015(4):33-36.
[5]胥帆.增程式电动汽车控制策略研究[D].锦州:辽宁工业大学,2015:32-35.
[6]OSCAR P R V,THOMAS K,WIM C T,et al.Technoeconomic comparison of series hybrid,plug-in hybrid,fuel cell and regularcars[J].Journal of Power Sources,2010,195(19):6570-6585.
[7]周苏,牛继高,陈凤翔,等.增程式电动汽车动力系统设计与仿真研究[J].汽车工程,2011,33(11):924-929.
[8]龚贤武,吴德军,马建,等.增程式电动汽车动力系统参数匹配与仿真研究[J].机械科学与技术,2014,33(4):929-933.
[9]SUN Y Z,LI X J,DENG J,et al.Type selection,matching and simulation of plug-in series hybrid electric car[J].Automotive Engineering,2010,32(12):1015-1020.
[10]牛礼民,许吉禅,刘超.车辆底盘故障诊断的多智能体技术研究[J].安徽工业大学学报(自然科学版),2013,30(4):419-424.
[11]曾小华,宫维钧.ADVISOR2002电动汽车仿真与再开发应用[M].北京:机械工业出版社,2014:1-8.
[12]RIBAU J,SILVA C,BRITO F P,et al.Analysis of four stroke,wankel,and micro-turbine based range extenders for electric vehicles[J].Energy Conversion and Management,2012,58:120-133.
责任编辑:何莉
Parameter Matching and Performance Simulation for Extended Range Electric Vehicle
ZHOU Yazhou,NIU Limin,YANG Hongyuan,YIN Ran
(School of Mechanical Engineering,Anhui University of Technology,Ma'anshan 243032,China)
In order to convert a battery electric vehicle into an extended-range electric vehicle,by analyzing the working patterns and principles of range extender,parameters of engine and generator of the range extender’s were matched,and reasonable design parameters were obtained.With the co-simulation platform of MATLAB/ Simulink and ADVISOR,the battery electric vehicle and the extended-range electric vehicle were simulated in the same driving cycle(CYC_UDDS)respectively.Simulation results show that the driving range of the extended-range electric vehicle reaches 177.8 km,meanwhile its dynamic performance and fuel efficiency can be controlled within an appropriate range,which indicates that the modification scheme is reasonable and effective,and it provides the reference for the transformation test and vehicle road test.
extended range;driving range;parameter matching;simulation analysis
U 469.72
:A
10.3969/j.issn.1671-7872.2016.04.013
1671-7872(2016)04-0378-06
2016-01-28
国家自然科学基金项目(51275002)
周亚洲(1992-),男,安徽来安人,硕士生,主要研究方向为混合动力汽车控制策略。
牛礼民(1976-),男,安徽肥东人,博士后,副教授,主要研究方向为混合动力汽车控制策略。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:08
汽车工程师(2021年11期)2021-12-21 06:23:10
北京第二外国语学院学报(2021年2期)2021-08-13 08:34:30
防爆电机(2021年1期)2021-03-29 03:02:28
车迷(2017年12期)2018-01-18 02:16:12
中国宝玉石(2017年2期)2017-05-25 00:37:11
中国宝玉石(2017年1期)2017-03-24 09:19:42
读写算(上)(2015年6期)2015-11-07 07:18:00
噪声与振动控制(2015年4期)2015-01-01 07:08:09
客车技术与研究(2014年1期)2014-03-20 14:34:48