
弹齿链耙式播前残膜回收机的设计研究
2016-03-23 06:45:09闫盼盼曹肆林李俊江营雨琨卢勇涛
农机化研究 2016年6期
关键词:弹齿
闫盼盼,曹肆林,罗 昕,胡 斌,李俊江,营雨琨,卢勇涛,王 敏
(1.石河子大学 机电学院,新疆 石河子 832000;2.新疆农垦科学院,新疆 石河子 832000)
弹齿链耙式播前残膜回收机的设计研究
闫盼盼1,曹肆林2,罗昕1,胡斌1,李俊江1,营雨琨2,卢勇涛2,王敏2
(1.石河子大学 机电学院,新疆 石河子832000;2.新疆农垦科学院,新疆 石河子832000)
摘要:随着地膜覆盖技术的推广应用,残膜带来的白色污染越来越严重。为了减轻污染,不影响播种、出苗,研究设计了新型弹齿链耙式播前残膜回收机。重点介绍了该机的总体结构、工作原理,以及捡拾链耙、弹齿、脱膜机构等关键部件的设计分析。田间试验表明:该机生产率为0.85hm2/h,残膜回收率为81%,满足残膜回收的技术要求,研究成果有利于解决残膜污染问题。
关键词:残膜回收机;链耙式;弹齿
0引言
在我国西北干旱半干旱地区,为防止早春低温,提高农作物产量,广泛应用了地膜覆盖栽培技术。目前,农田使用聚乙烯地膜降解周期长,作物收获后残留在田间的地膜给土壤和环境造成极大的累积污染,同时影响播种等正常作业,急需对其进行有效回收。播前收膜是当前农业生产中一项重要的作业环节,可明显降低种子播在残膜上造成不出苗、死苗和烂苗等几率,有利于农业的增产增收。
现阶段残膜回收主要有人工回收和机械回收两种方式:人工回收残膜效率低,劳动强度大,回收成本高,不适应大面积作业;机械回收残膜可有效提高作业效率,降低劳动强度,是残膜污染治理的重要途径。现有的播前收膜机械主要是搂膜耙和扎膜辊。搂膜耙可将地表膜搂起,但每前进一段距离需要停机卸膜,否则影响搂膜效果,且卸下的残膜还需用其他机具运出田间,费时费力;扎膜辊可将地表膜轧在滚齿上,但需人工脱膜,脱膜困难[1-3]。针对这些问题,设计了一种弹齿链耙式播前残膜回收机,可实现长距离作业和自动卸膜,减少了以往人工退膜程序和非作业时间,大大提高了劳动生产率。其结构简单、工作可靠、作业效率高,为播前残膜回收工作提供了一种新思路和新机具,缓解了春播期间劳动力紧缺的压力。
1整机结构与工作原理
1.1整机结构
该机的总体结构包括机架、传动系统、捡拾链耙、限深轮、集膜箱、卸膜油缸、齿轮箱及脱膜机构等,如图1所示。

1.机架 2.传动系统 3.捡拾链耙 4.限深轮
1.2工作原理
该机收膜时,主要分为3个工作段:弹齿入土挑膜段—提升段—脱膜段。链耙工作时,脱膜段与地面平行,提升段底部的弹齿接触地表。调整限深机构至弹齿入土20~50mm,拖拉机拉动机具向前运动的同时,动力经传动系统驱动主动轴带动链耙上的弹齿顺时针转动并挑起地表的残膜;当弹齿转动到脱膜段,齿尖朝下,大部分残膜在重力作用下掉入集膜箱,少量未能自动脱落的残膜在弹齿经过脱膜机构时被刷落;当集膜箱集满时,将机具行驶到地头,提升机具离开地面至一定高度,操控卸膜油缸打开集膜箱底板倾倒成堆。
1.3主要技术指标和技术参数
本机一次作业可实现捡膜及卸膜回收工作,主要参数如表1所示。
表1弹齿链耙式播前残膜回收机的主要参数
Table 1Main parameters of spring-tooth-chain- rake incomplete plastic film recycling machine before planting machine
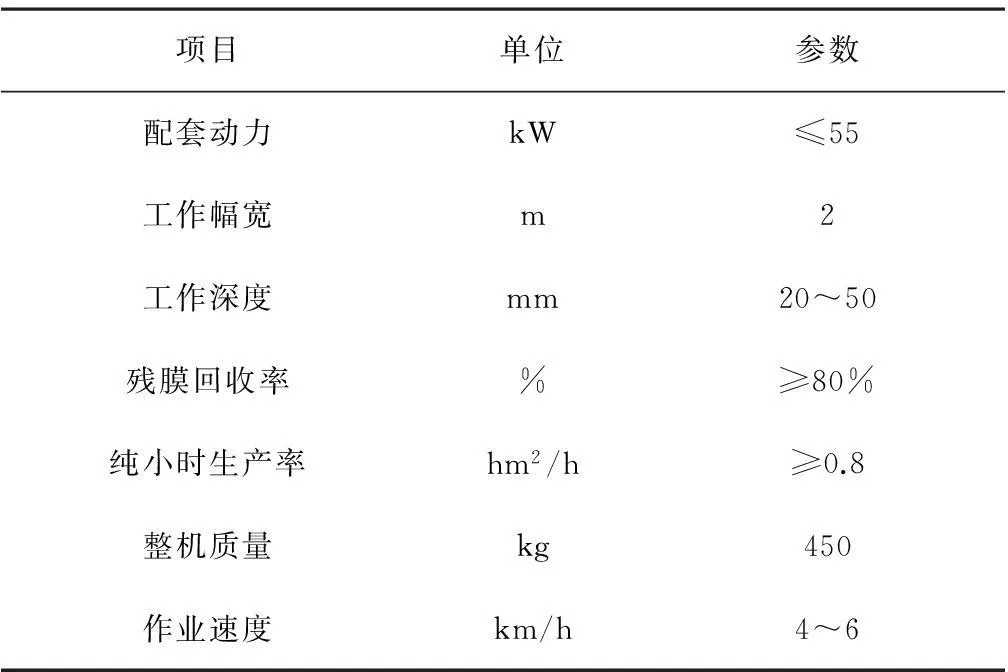
项目单位参数配套动力kW≤55工作幅宽m2工作深度mm20~50残膜回收率%≥80%纯小时生产率hm2/h≥0.8整机质量kg450作业速度km/h4~6
2关键部件的设计
2.1捡拾链耙
2.1.1功能要求与设计思路
弹齿链耙式收膜装置的主要作用有两方面: 一是转动链耙上的弹齿入土挑起残膜;二是挑起的残膜被链耙上的弹齿携带前进,在弹齿振动中实现膜杂分离,分离后的残膜分别受重力作用和脱膜刷作用进入集膜箱。
因此,弹齿链耙式收膜装置机构的设计必须满足以下要求: 一是要有合适的弹齿入土倾角及入土深度,能将残膜顺利地从土壤中挑出;经过实地勘察和测量,表层至50mm深度是残膜集中区,所以弹齿的入土深度确定为50mm。二是链耙的输膜倾角要满足在提升段土块自行滑落,以减少含杂。三是结构简单、功耗低、作业效率高。
弹齿入土倾角、入土深度、链耙转速、链耙的输膜倾角是影响捡拾链耙性能的重要指标。为了寻找合理的参数配置,以保证链耙工作时能够连续收膜且尽量不漏捡,需要对弹齿的运动进行分析。
2.1.2弹齿的运动分析
取任一弹齿的顶点M,该点不仅随着链耙作转动,同时也随机组水平向前运动。因其运动较为复杂,本文只分析弹齿从入土到出土这段时间内的运动。如图2所示:该运动中弹齿由A点入土经过B点后从C点出土,此过程是一个从压膜到挑膜的过程,弹齿随机具的行走速度V一起移动,同时又以绕链耙从动轮轴心O做匀速转动。弹齿的运动分析如图2所示。

图2 弹齿的运动分析
弹齿由A到C的时间为t,则弹齿端点M从A到B的运动轨迹方程为
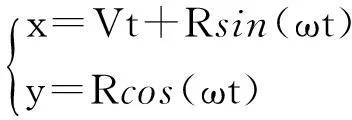
(1)
式中V—机具的行走速度(m/s);
t—A到C点的运动时间(s);
R—捡拾机构的回转半径(mm);
ω—弹齿绕O点的旋转角速度(rad/s)。
这里捡拾机构的回转半径即弹齿的长度,下同。
假定捡拾耕层内残膜时,以弹齿在地面以下的作用面为有效捡拾面,即要使残膜回收机工作时不漏捡,前一排捡膜弹齿端点经过有效捡拾面离开地面时,下一排弹齿的端点至少应进入地面,如图3所示。

图3 弹齿的运动轨迹
由图3可知:h=R(1-cosα),2Rsinα=O1O2。工作时不能漏捡应满足:2Rsinα≥V(t2-t1)。
当半径R转过角度2α时,其经过的时间为t1也是捡拾弹齿从入土到出土所经过的时间,因此t1=2α/ω。设同一圆周上弹齿的排数为n,则相邻两排弹齿之间的夹角为β=2π/n;下一排弹齿转过β角后,它的齿端位于A2,所经过的时间是t2=2π/nω。将t1、t2带入上式求解得
由上式求解得
经整理,得
(2)
式中v—机具的行走速度(m/s);
t—A到C点的运动时间(s);
R—捡拾机构的回转半径(mm);
ω—弹齿绕O点的旋转角速度(rad/s);
h—弹齿的入土深度(mm);
α—弹齿的入土倾角(°);
n—链耙圆周上的弹齿排数。
综上可以得出:只要确定机具的行走速度、弹齿的长度、弹齿的入土深度和链耙圆周上的弹齿排数,就可以确定对应捡拾链耙的旋转角速度ω。因此,捡拾机构在适当配置链耙旋转角速度ω的情况下,就可具有连续捡膜的功能[3-4]。
2.1.3弹齿入土倾角的设置
弹齿捡膜的工作过程是弹齿以一定角度进入土壤,将耕层内的残膜挑起,再将其挑离整个土面的过程,是一个复杂的非线性结构动力学问题。当地块较硬、地表残膜较多时,土壤和残膜对弹齿的阻力较大。为避免弹齿弯曲过大及弹齿入土后能把残膜捡拾上来,需要增大弹齿入土倾角;但过大的入土倾角会减少单排弹齿的捡拾距离,容易引起漏捡。经试验,弹齿合适的入土倾角为10°~20°。
2.1.4链耙转速的设置
链耙转速关系到整机的工作效率:转速过高,容易打碎地膜,给地膜回收增加更大的难度,且过高的转速会加剧弹齿的磨损,导致弹齿疲劳破坏,降低使用寿命;过低的转速会降低收膜机的工作效率,更重要的是链耙转速的高低关系到链耙是否可以连续收膜。本文由上面得出的弹齿入土倾角的范围、弹齿入土深度及机组前进速度可以得出链耙的旋转角速度,取h=50mm,α=15°,v=6m/s,R=150mm;又由相邻两排弹齿的间距即弹齿固定轴之间的距离d=2πr/n及本文链条和链轮采用的型号为24A,链节距为38,得到n=4.4,取n=5。其中,r为链耙的半径,r=108mm;d=152mm。把h、R、n、α、ν的值带入到公式(2),得到ω≥13.8rad/s。这时,链耙可实现连续收膜,不会漏捡。本文设计链耙主动轴的转速为135r/min。
2.1.5链耙输膜倾角的设置
因为链耙输膜倾角的大小关系到在提升段土粒振落下来的能力,所以要设计一个大小合适的值,防止土粒在提升段降落进入集膜箱,需要分析土粒在链耙提升段的受力情况。
取链耙提升段任意1位置的土粒并对其进行受力分析,如图4所示。链耙对土粒具有法向作用力N及摩擦力F,两者的合力为R,φ为土粒与链耙的摩擦角,θ为链耙输膜倾角。N可分解为使土粒随链耙一起运动的作用力p及土粒沿链耙向上滑动的作用力T[5-6]。土粒向地表下落的条件为
F>T
由于F=Ntanφ,T=Ntan(90°-θ),因此Ntanφ>Ntan(90°-θ),即φ>90°-θ,θ>90°-φ。所以,链耙的输膜倾角θ取决于土粒对链耙的摩擦角,如果θ>90°-φ,则土粒在提升段顺利落下,不会进入集膜箱。经试验,一般土粒与钢的摩擦角是15°~40°,所以链耙的输膜倾角θ要大于50°~75°,本文取θ=60°。

图4 土粒的受力分析
2.1.6捡拾链耙结构设计
根据以上对不漏检条件的分析计算,设计出弹齿链耙式收膜装置的结构。该装置的主要结构有链轮、链条、弹齿、弹齿固定轴及张紧轮组成。其输膜倾角为60°,弹齿固定轴绕链耙1周均匀地排列,固定轴间距为152mm,共31排,如图5所示。考虑到工作环境的恶劣及较大的冲击载荷,链条和链轮采用的型号为24A,每相隔4个节距的内链板采用双耳结构,用来安装弹齿固定轴。弹齿固定轴通过螺栓连接固定在内链板上,由于工作时链耙振动较大,为防止螺栓松动,全部采用锁紧螺母。

1.链耙主动轮 2.弹齿固定轴 3.弹齿
2.2弹齿的设计
弹齿是播前残膜回收机的关键部件,其作用是将散落在地表及嵌在耕层内小于等于50mm深度的残膜从土壤挑出地面,然后由捡拾链耙输送进入集膜箱。因此,要求弹齿在满足工作需求的条件下结构简单、工作可靠。
为便于安装和拆卸,同时又能有较大的强度和稳定性,弹齿采用对称双弹齿结构,左右两侧各有3圈螺旋弹簧结构。弹齿材料为65Mn、直径为6.0mm、一端设计有φ10.0mm的螺栓定位孔;同时,与该定位孔垂直的方向上设计有螺旋弹簧式的定位孔,便于安装拆卸。由于弹齿入土深度为50mm,弹齿长度L在设计时需要有一定的富余量,同时考虑到弹齿端部受力较大,长度越大变形量也越大,弹齿长度L取150mm,如图6所示。为了详细地分析弹齿受力,对弹齿进行了有限元分析。
2.2.1建立有限元模型
通过SolidWorks三维软件对弹齿进行三维建模,如图7所示。将模型保存为.x-t格式并导入ANSYS/Wokebench有限元分析软件中,进行静应力分析。经查阅材料手册,得到65Mn材料的基本特征:泊松比为0.3,屈服强度为784MPa,抗拉强度为980MPa,弹性模量为210GPa。划分网格时,单元采用三维四面体单元Solid92单元。根据实际受力情况,弹齿固定轴上的固定孔周围受力较大,计算精度要求较高,因此固定孔及螺旋弹簧处需要较细的网格划分,共划分了8 165个单元,得到15 060个节点。

图6 弹齿的结构图

图7 弹齿的三维图
2.2.2加载和约束
由于弹齿受力是一个动态的过程,为便于分析,选取弹齿入土最深时的极限载荷条件,即链耙旋转捡拾残膜时弹齿端点M运动到B点的状态。此时,弹齿在土壤中的深度达到最大值50mm,受到的土壤阻力也最大。
在定义弹齿边界条件时,为了让弹齿的底端不发生位移变化,需要对其全部自由度进行约束。弹齿圆环固定在弹齿固定轴上,受到两个方向的约束,整个弹齿相当于悬臂梁结构。
2.2.3有限元分析的结果
通过有限元分析,得到弹齿的应力应变结果,如图8、图9所示。其最大的应力发生在螺旋圆环与弹齿直杆连接处,应力值为552.08MPa。由于材料的抗拉强度为980MPa,取安全系数为1.5,该材料许用应力[σb]=653MPa,因此σ<[σb]。从图8、图9可以看出:最大变形量发生在弹齿顶端,最大位移值为1.88mm;该位移相对整个弹齿较小,在许可范围之内。因此,该链耙式收膜装置的弹齿符合设计要求。
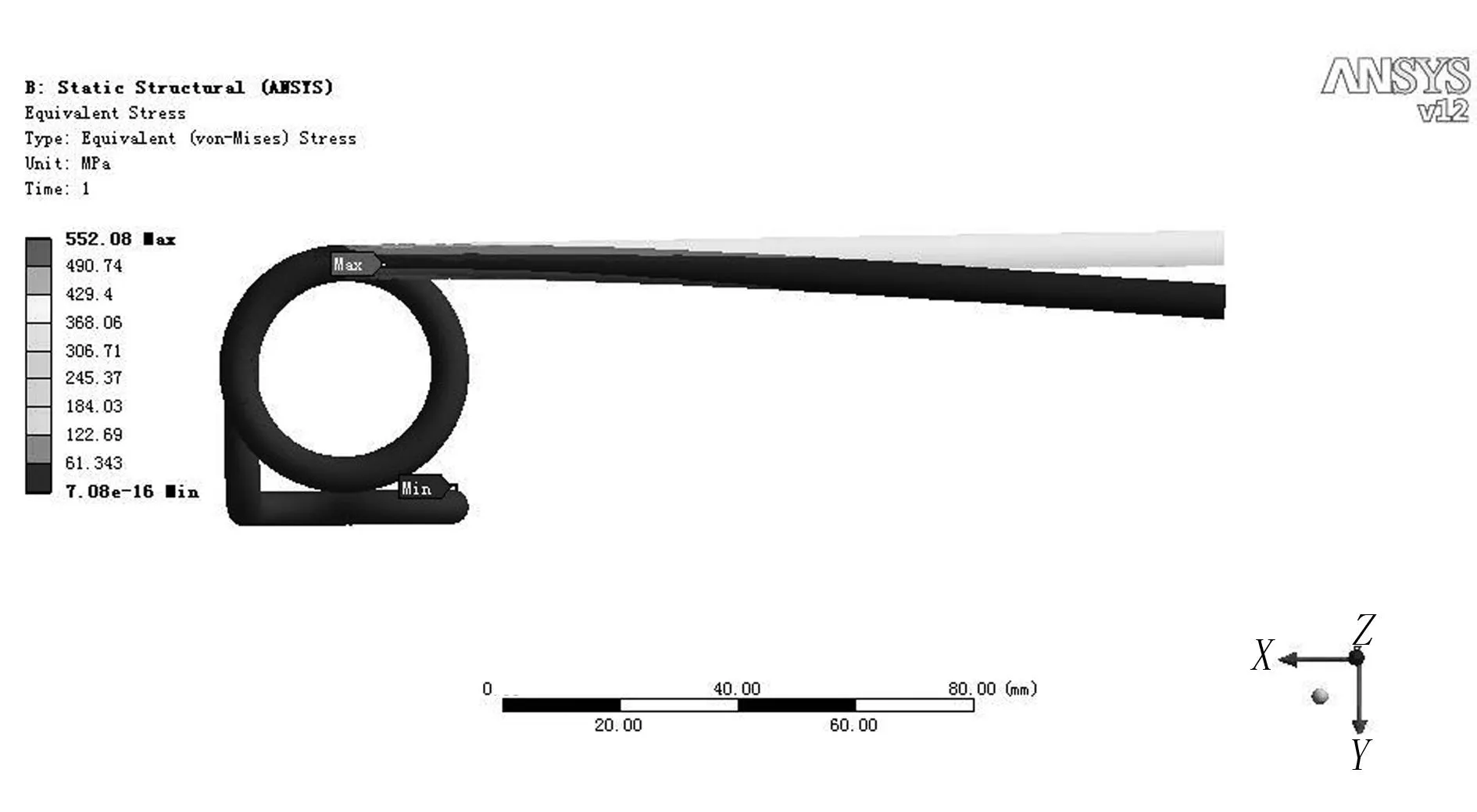
图8 弹齿的应力云图

图9 弹齿的变形云图
2.3弹齿的排列
据田间调查残膜主要是以4~25cm2的大小存在于土壤中[7],所以本文针对耕层内面积为4cm2的残膜设计同一固定轴上弹齿的间距,且相对的上下固定轴上的弹齿呈交错排布。弹齿通过螺栓在弹齿固定轴上均匀安装,每排共12个,相邻弹齿间距为85mm,如图10所示。
2.4脱膜机构的设计
脱膜机构的设计是残膜回收机研制的关键环节,但由于残膜具有吸附、缠绕等复杂的物理特性,根据机型的不同,现在主要的脱膜方法有人工脱膜、伸缩杆齿脱膜和脱膜叶片脱膜等。相比后两种脱膜方法可知:人工脱膜效率较低,劳动强度较大,可控性较差;伸缩杆齿结构复杂,机具的正常工作受杆齿变形的影响较大。脱膜叶片结构紧凑,相比前两种,其工作可靠性高;但由于现有叶片脱膜装置为滚筒型,且在滚筒圆周方向均布有脱膜叶片,工作时叶片与捡拾机构的运动方向正好相反,此种作用方式属逆向脱膜,残膜容易被撕裂,且在这种单次作用方式下不易使残膜与捡拾机构有效分离,脱膜效果差[8-10]。
针对上述问题,本文设计了一种新型的脱膜机构。该机构安装在链带脱膜段前部下方的机架上,由脱膜架和脱膜刷组成,且脱膜刷安装在脱膜架的矩形槽内,刷尖朝弹齿方向与竖直面成45°角。脱膜刷可以用弹性橡胶带、硬质毛刷等代替。如图11所示:当弹齿转动到脱膜段时,齿尖朝下,随着弹齿的转动,脱膜刷将扎、套在弹齿上的残膜梳刷到集膜箱。同时,可以通过调整螺栓在U型孔中的位置调整脱膜架中脱膜刷的位置,使脱膜刷与弹齿接触的长度与弹齿的入土深度一致。

图10 弹齿在弹齿固定轴上的安装方式

图11 脱模机构
3田间试验
试验在新疆石河子市145团场进行,作业块地为春播前经过整地后的棉田。通过试验得到以下结果: 残膜回收机行驶速度在4~6km/h的情况下,残膜回收率为81%,纯小时生产率为0.85hm2/h,符合农业部行业标准《残地膜回收机作业质量》NY/T1227—2006的相关要求。田间试验场景如图12所示。

图12 田间试验
4结论
本文得出了影响弹齿链耙式播前残膜回收机构性能的主要因素:弹齿入土倾角为10°~20°,输膜倾角为50°~75°,链耙转速为135r/min;同时,通过对弹齿的运动分析,得到弹齿的运动轨迹和连续收膜的条件。脱膜机构的设计减少了以往人工退膜程序和非作业时间,解决了搂膜弹齿脱膜技术难题,大大提高了劳动生产率。田间试验表明:残膜回收率大于80%,且结构简单、生产效率高、价格便宜,可以满足农户残膜回收的要求,适宜在兵团大面积推广。
参考文献:
[1]侯书林,胡三媛,孔建铭,等.国内残膜回收机研究的现状[J].农业工程学报,2002,18(3):186-190.
[2]靳伟,张学军,朱自成,等.残膜回收机具自动清理装置的研究[J].机械,2013,40(7):7-10.
[3]穆道欢,杨宛章.残膜回收机弹齿式捡拾机构的设计及试验研究[J].农机化研究,2015,37(11):92-93.
[4]赵海军.残膜捡拾滚筒的运动学和动力学研究[D].乌鲁木齐:新疆农业大学,2005.
[5]李斌.后置链齿耙式残膜回收机工作机理研究[D].石河子:石河子大学,2013.
[6]李革,斯拉海提,聂新富.弹齿式搂膜机弹齿的设计要点[J].新疆农机化,1995(4):34.
[7]司明理.气吹式春播前残膜回收机理论分析及试验研究[D].乌鲁木齐:新疆农业大学,2007.
[8]张佳.驱动耙残膜回收联合作业机的设计及试验研究[D].乌鲁木齐:新疆农业大学,2013.
[9]蒙贺伟,李进江.梳齿滚筒式残膜回收机的设计[J].农机化研究,2012,34(3):147.
[10]曹肆林,王序俭.残膜回收机机械化技术的专利分析研究[J].中国农机化,2009(4):50.
Research on the Spring-tooth-chain- rake Incomplete Plastic Film Recycling Machine
Yan Panpan1, Cao Silin2, Luo Xin1, Hu Bin1, Li Junjiang1, Ying Yukun2, Lu Yongtao2, Wang Min2
(1.Mechanical and Electrical Engineering College, Shihezi University, Shihezi 832000, China; 2.Xinjiang Academy of Agricultural and Reclamation Science, Shihezi 832000, China)
Abstract:With the popularization and application of mulching technology,white pollution caused by plastic film is getting worse.In order to reduce pollution, does not affect seeding, emergence, design a new type of spring-tooth-chain- rake incomplete plastic film recycling machine before planting machine.It highlights the aircraft's overall structure, working principle, key components such as pick-up chain harrow, spring-tooth, taking off the membrane mechanism for design analysis.Field test showed that the aircraft pure-hour production rate is 0.85hm2/h,recovery of plastic film is 81%. The plastic film recycling can meet the technical requirements and the study results may help solve the problem of plastic film pollution.
Key words:plastic film recycling machine; chain rake; spring-tooth
文章编号:1003-188X(2016)06-0137-06
中图分类号:S223.5
文献标识码:A
作者简介:闫盼盼(1989-),女,山东菏泽人,硕士研究生,(E-mail)958059401@qq.com。通讯作者:曹肆林(1982-),男,安徽望江人,副研究员,(E-mail)csl405240@sohu.com。
基金项目:新疆生产建设兵团重大科技专项(2014AA002-4)
收稿日期:2015-07-06
猜你喜欢
甘肃农业大学学报(2022年5期)2023-01-08 05:45:38
农业科技与装备(2022年6期)2022-04-13 08:08:12
林业机械与木工设备(2022年2期)2022-03-08 01:32:22
农业工程学报(2021年6期)2021-06-01 14:21:44
农业装备技术(2020年5期)2020-12-14 22:48:38
农业机械学报(2020年10期)2020-10-29 11:19:34
农业工程学报(2020年16期)2020-10-21 05:45:54
机械工程师(2020年3期)2020-03-27 06:33:36
农机化研究(2017年4期)2017-12-16 02:48:38
农机化研究(2016年2期)2016-03-24 08:29:45
