
吊篮式自动移栽机动态喂苗影响因素分析
2016-03-23 08:11:38韩长杰赵晓伟赵占军杨宛章
农机化研究 2016年7期
关键词:吊篮
韩长杰,赵晓伟,郭 辉,赵占军,张 静,杨宛章
(新疆农业大学 机械交通学院,乌鲁木齐 830052)
吊篮式自动移栽机动态喂苗影响因素分析
韩长杰,赵晓伟,郭辉,赵占军,张静,杨宛章
(新疆农业大学 机械交通学院,乌鲁木齐830052)
摘要:吊篮式自动移栽机在移栽过程中遇到移栽地面不平整或车速波动,易造成吊篮式自动移栽机平抛喂苗准确率降低。为此,通过对吊篮式自动移栽机平抛喂苗运动进行分析,提出了改变苗筒喂苗位置来解决此问题的方法。通过分析得出:当栽植器机架倾角逐渐大于-arctan(0.073vm)时,苗筒喂苗位置沿车速方向移动。当栽植器机架倾角逐渐小于-arctan(0.073vm)时,苗筒喂苗位置沿车速方向移动。当栽植器机架倾角恒定时,车速增大,苗筒喂苗位置需要沿车速的相反方向移动;车速度减小时,苗筒喂苗位置需要沿车速方向移动;最佳吊篮接苗位置不随车速的波动而发生改变。本研究结论为提高吊篮式自动移栽机喂苗准确性奠定理论基础。
关键词:吊篮;苗筒;自动移栽机;平抛喂苗;轨迹模型
0引言
国内旱地移栽机的研究,始于20世纪70年代,主要是在发达国家移栽机构的基础上,进行了改进[1-3],并以半自动移栽机为主;而自动移栽机因结构相对复杂、研究成本高,且移栽模式受钵苗种类不同,结构相差大。目前,自动移栽机在国内尚处于试验研究阶段[4],主要机型有俞高红[5-12]等人研究的齿轮行星轮系自动移栽机;陈达[13]等人研究的自动分钵式栽植器;张晨[14]等人研制的2ZB-2穴盘钵苗旱地膜上自动移栽机等。
本文研究对象为韩长杰[15-16]等人设计的自动移栽机,该机喂苗方式为平抛喂苗。在移栽过程中,当受到地面不平整或车速波动时,钵苗不能准确喂入吊篮内,为解决此问题,本文对平抛喂苗运动进行了分析。
1动态喂苗速度分析
吊篮式自动移栽机传动示意图,如图1所示。拖拉机向前行驶驱动地轮转动,地轮经六方轴驱动栽植器及自动取喂装置工作。
图1中:链轮1'、1的齿数均为20,链轮2'、2的齿数均为17,链轮5、6的齿数均为16,链轮3的齿数为16,链轮4的齿数为20;轴Ⅰ'、Ⅰ为地轮的转动轴,轴Ⅱ为栽植器的转动轴,轴Ⅲ为六方轴,轴Ⅳ、轴Ⅴ分别为自动取喂装置的水平轴、竖直轴。根据传动关系可得,i12=0.85,i34=1.25,i56=1。
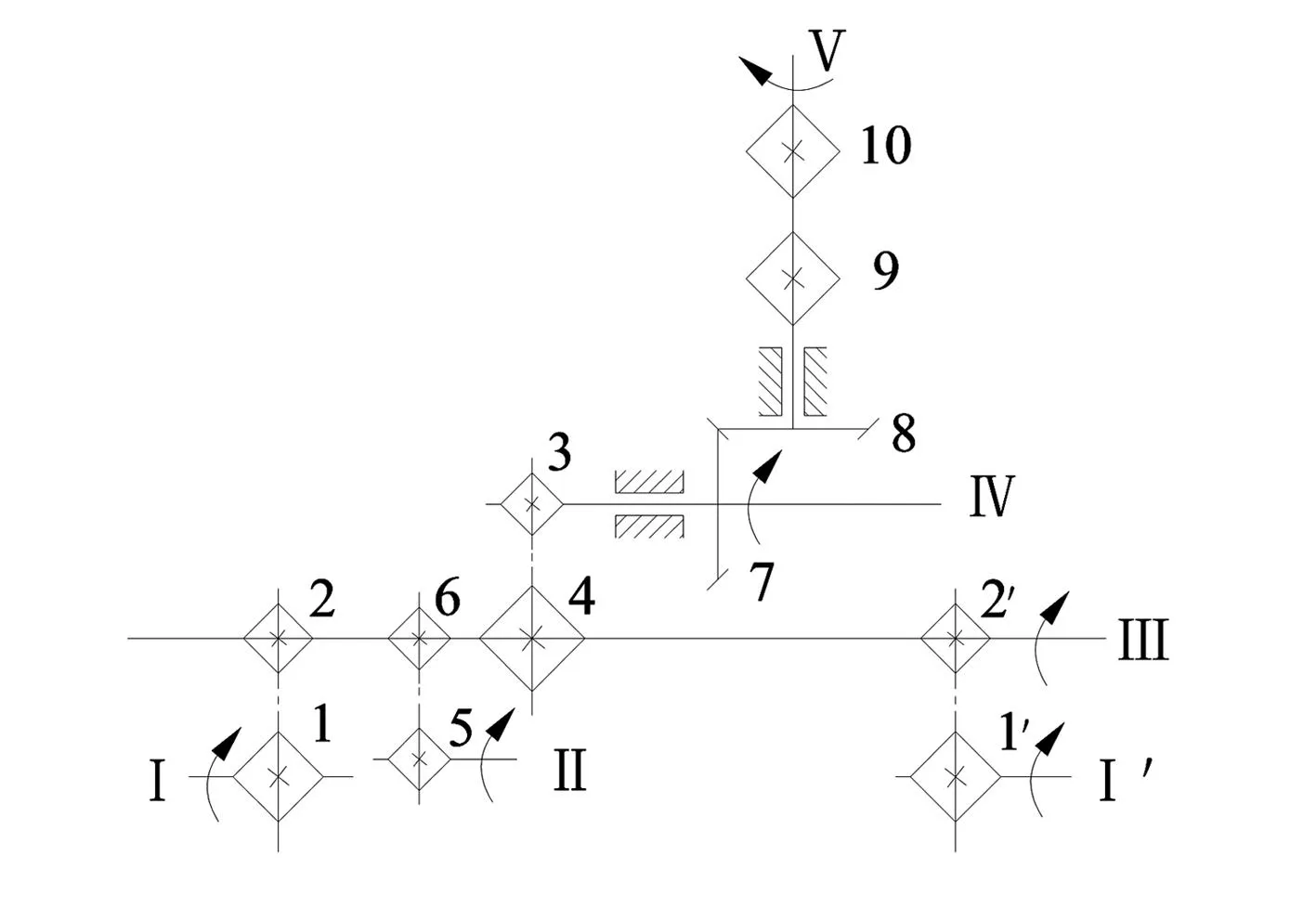
图1 吊篮式自动移栽机传动示意图
根据链传动分析计算得
(1)
其中,n1、n3、n5分别为相应链轮的转速(r/s)。
各链轮的速度为
(2)
其中,v1为地轮速度(m/s);vm为车速(m/s);vE为钵苗水平速度(m/s);vF为吊篮速度(m/s);d1为地轮直径(m);r为栽植圆盘半径(m);d9为链轮9分度圆直径(m);δ为地轮滑移系数。
2动态喂苗轨迹分析
以栽植器的转动中心O为原点,车速反方向为x轴的正方向,竖直向上为y轴的正方向,建立直角坐标系,如图2所示。图2中,vm表示车速;O2点为栽植器机架铰接点;O3点为可伸缩的活门托板末端固定点;a为在吊篮接苗点位置时,吊篮固定点与原点的连线相对水平面的夹角。当栽植器机架绕其铰接点O2倾斜θ角时,根据几何关系可得
(3)
其中,s1为A、B两点的水平距离(m);s2为A、B两点的竖直距离(m);s3为B、O3两点的水平距离(m);l为O2、O两点的距离(m);θ为栽植器机架倾角(°);l0为O3点的x轴坐标(m)。
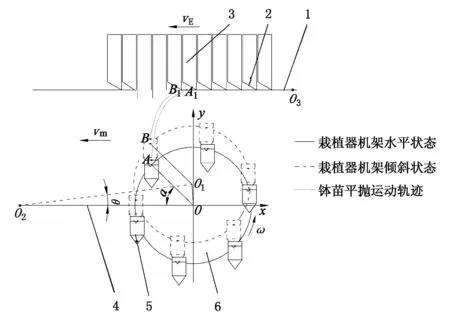
1.活门托板 2.活门 3.苗筒 4.栽植器机架
2.1吊篮接苗位置
为保障钵苗准确落入吊篮内,且钵苗与吊篮的碰撞较小,需确定吊篮最佳接苗位置。
在图2直角坐标系xOy中,由分析可得
(4)
其中,h0为栽植器机架固定点O2到活门托板的竖直距离(m);h为吊篮固定点到吊篮上平面的竖直距离(m);h1为钵苗从落苗位置平抛运动到吊篮接苗位置的竖直位移(m)。
当钵苗与吊篮的水平速度相同时,钵苗与吊篮在水平方向上无碰撞,此时吊篮接苗位置为其最佳接苗位置,可得
(5)
式中ω—栽植器圆周运动的角速度(rad/s)。
联立式(1)、式(2)、式(5)得
(6)
由式(6)可知:当栽植器机架倾角恒定时,最佳接苗位置不随车速波动而发生变化。
2.2苗筒喂苗位置
苗筒喂苗位置依靠活门托板长度来控制,其长度是苗筒喂苗点B1到活门托板固定点O3的距离,如图2所示。
当栽植器机架倾角为θ时,分析可得
(7)
其中,x2为钵苗水平位移(m);h2为钵苗竖直位移(m);t2为运动时间(s);g为重力加速度(m/s2);l1为活门托板长度(m)。
联立式(1)~式(5)、式(7)得
(8)
2.3栽植器机架倾角范围
吊篮式栽植器在移栽过程中,栽植器机架随地面起伏变化做上下浮动,栽植器与悬挂主梁的连接形式如图3所示。栽植器机架与固定板铰接,并通过固定板接悬挂主梁。栽植器机架向上倾斜的极限位置为其向上接触到固定板,向下倾斜的极限位置为其向下接触到限位板。栽植器机架倾角范围为
(9)

1.栽植器机架 2.限位板 3.悬挂点 4、5.固定板
3动态喂苗影响因素分析
本文只分析栽植器机架倾角θ和车速vm对活门托板长度l1变化的影响。部分参数依据韩长杰等人研制的自动取喂装置和吊篮式栽植器组装成的自动移栽机:d1为0.57m,d9为0.086 4m,g为9.8m/s2,h0为0.51m,h为0.02m,h3和h4均为0.02m,l0为0.5m,l为0.75m,l3为0.065m,l4为0.185m,r为0.252m,橡胶轮胎在农田内的滑移系数δ为0.05[17]。将各参数代入式(8)、式(9)得
(10)
-6.2°<θ<17.1°
式(10)对栽植器机架倾角θ求导并令导数为0可得
θ≈-arctan(0.073vm)
(11)
3.1栽植器机架倾角对喂苗位置的影响
栽植器机架倾角与活门托板长度的关系,如图4所示。由图4及式(11)可知:当栽植器机架倾角大于-arctan(0.073vm)时,随着栽植器机架倾角逐渐增大,活门托板长度也逐渐增大,此时苗筒喂苗位置沿车速方向移动;当栽植器机架倾角小于-arctan(0.073vm)时,随着栽植器机架倾角逐渐减小,活门托板长度逐渐增大,此时苗筒喂苗位置沿车速方向移动,才能满足准确喂苗。
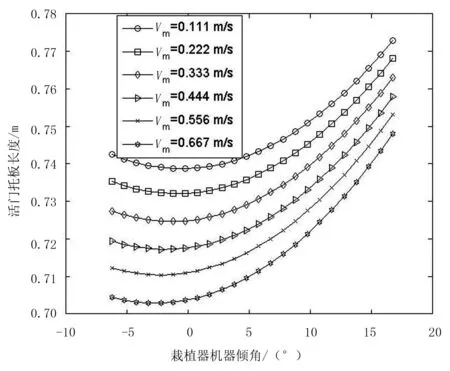
图4 栽植器机架倾角与活门托板长度的关系
从图2可知:当栽植器接苗位置在第1象限内时,栽植器吊篮上下浮动较大,不利于接苗;当栽植器接苗位置在第3、第4象限内时,第1、第2象限内的吊篮将会干涉钵苗落入吊篮,无法接苗,故接苗位置选择在第2象限内。
由图4可知:当活门托板长度在0.7~0.78m浮动时,钵苗均能从苗筒中下落后进入吊篮,此时落苗口恰好处在如图2中的第2象限,因此能够实现从吊篮最佳接苗位置接苗。
3.2车速对喂苗位置的影响
车速与活门托板长度的关系,如图5所示。车速越大,活门托板长度越小,苗筒喂苗位置需要沿车速反方向移动。不同的是,当栽植器机架倾角在2°与-6°时,两直线出现交叉现象。这主要是因为在栽植器机架倾角大小为-arctan(0.073vm)时,活门托板长度最小,故栽植器机架倾角在-arctan(0.073vm)两侧存在活门托板长度相等且苗筒能准确喂苗的情况。
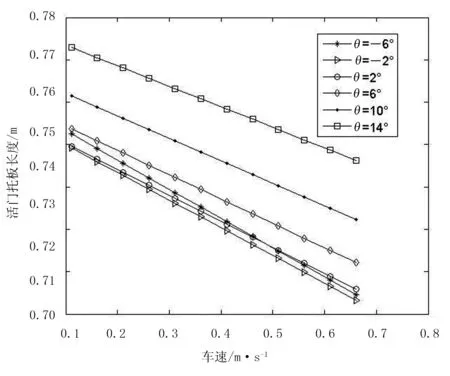
图5 车速与活门托板长度的关系
4结论
1)对吊篮式自动移栽机自动取喂装置喂苗运动进行理论分析,得出活门挡板长度与栽植器机架倾角和车速之间的运动学模型。
2)当栽植器机架倾角大于-arctan(0.073vm)时,随着栽植器机架倾角逐渐增大,活门托板长度也逐渐增大,此时苗筒喂苗位置沿车速方向移动;当栽植器机架倾角小于-arctan(0.073vm)时,随着栽植器机架倾角逐渐减小,活门托板长度逐渐增大,此时苗筒喂苗位置沿车速方向移动,才能满足准确喂苗。
3)当栽植器机架倾角恒定时,车速增大,活门托板长度减小,苗筒喂苗位置需要沿车速反方向移动,且最佳喂苗位置不随车速的变化而改变。
参考文献:
[1]赵晓伟,郭辉,张静,等.新疆旱地移栽机的现状及发展趋势[J]. 新疆农机化,2014(4):25-29.
[2]于向涛,胡良龙,胡志超,等.我国旱地移栽机械概况与发展趋势[J]. 安徽农业科学,2012,40(1):614-616.
[3]张冕,姬江涛,杜新武,等.国内外移栽机研究现状与展望[J]. 农业工程,2012(2):21-23.
[4]韩长杰,杨宛章,张学军,等.自动移栽技术现状与分析[J].新疆农机化,2011(5):5-6.
[5]俞高红,刘炳华,赵匀,等.椭圆齿轮行星轮系蔬菜钵苗自动移栽机构运动机理分析[J].农业机械学报,2011,42(4):53-57.
[6]俞高红,黄小艳,叶秉良,等.旋转式水稻钵苗移栽机构的机理分析与参数优化[J].农业工程学报,2013,29(3):16-22.
[7]俞高红,陈志威,赵匀,等.椭圆-不完全非圆齿轮行星系蔬菜钵苗取苗机构的研究[J].机械工程学报,2012,48(13):32-39.
[8]陈建能,黄前泽,王英,等.钵苗移栽机非圆齿轮行星轮系栽植机构参数分析与反求[J].农业工程学报,2013,29(8):18-26.
[9]陈建能,王英,黄前泽,等.钵苗移栽机变形椭圆齿轮行星系植苗机构优化与试验[J].农业机械学报,2013,44(10):52-56, 92.
[10]陈建能,黄前泽,王英,等.钵苗移栽机椭圆齿轮行星系植苗机构运动学建模与分析[J].农业工程学报,2012,28(5):6-12.
[11]赵雄,沈明,陈建能,等.棉花移栽机旋转式取苗机构的运动学分析及虚拟试验[J].农业工程学报,2014,30(8):13-20.
[12]赵雄,陈建能,王英,等.水稻钵苗“D形”静轨迹移栽机构逆向设计与分析[J].农业工程学报,2012,28(8):92-97.
[13]陈达,周丽萍,杨学军.移栽机自动分钵式栽植器机构分析与运动仿真[J].农业机械学报,2011,42(8):54-57, 69.
[14]张晨,梁佳,郭俊先,等.2ZB-2型穴盘钵苗旱地膜上自动移栽机的研制与试验[J].新疆农机化,2014(1):19-20.
[15]韩长杰,杨宛章,张学军,等.穴盘苗移栽机自动取喂装置的设计与试验[J].农业工程学报,2013,29(8):51-61.
[16]韩长杰,郭辉,万建林.穴盘苗移栽自动取喂苗装置:中国,CN 201491493 U[P]. 2010-06-02.
[17]北京农业工程大学.农业机械学(上册)[M].北京:中国农业出版社,2003.
Trajectory and Influencing Factors of Dynamic Dropping Seedling Analysis for Nacelle-type Automatic Transplanter
Han Changjie,Zhao Xiaowei, Guo Hui, Zhao Zhanjun, Zhang Jing, Yang Wanzhang

Abstract:A new-style automatic transplanter that is composed of automatic feeding system and nacelle-type planting apparatus is designed. Artificial to pick seedling and feed seedling is replaced by automatic feeding system. Because of the seedlings that leave automatic feeding system will move to nacelle in horizontal projectile motion, decreasing of dropping seedling accuracy from field unevenness or speed changeable of automatic transplanter. In order to solve the low dropping seedling accuracy, the dropping seedling of the automatic transplanter is analyzed, and a scheme that changes dropping seedling location of guiding tube is proposed. The mathematics model of the shutter plate length is established, and the model is simulated by Matlab R2011b. when the change of planting apparatus traction frame angle and speed in the course of transplanting, the length variation of the shutter plate length is analyzed in this paper. According to the automatic transplanter which is composed of automatic feeding system and planting apparatus with nacelle, some parameters of the model is determined.The results show that when the traction frame of planting apparatus gradually more than -arctan(0.073vm), the dropping seedling edge of guiding tube shift to the speed direction; when the traction frame of planting apparatus gradually less than -arctan(0.073vm), the dropping seedling edge of guiding tube shift to the speed direction, and then moves at the speed direction; when the tilt angle of traction frame don’t change, as the speed increases, the dropping seedling location of the guiding tube moves at the reverse speed direction, and as the speed slowly, the dropping seedling location of guiding tube moves at the speed direction, and the best dropping seedling position will not change as only the speed changes.The movement mechanism analysis will provide theoretical foundation for improving the dropping seedling reliability of the nacelle-type automatic transplanter.
Key words:nacelle; guiding tube; automatic transplanter; horizontal projectile dropping seedling; trajectory model
文章编号:1003-188X(2016)07-0110-04
中图分类号:S223.92
文献标识码:A
作者简介:韩长杰(1980-),男,河南遂平人,副教授,博士,(E-mail)hcj_627@163.com。
基金项目:国家自然科学基金项目(50905153);新疆农机开发项目(2011-NJKY-07);新疆自治区高技术发展研究计划项目(201211117);留学人员择优资助项目(2014)
收稿日期:2015-06-18
猜你喜欢
建筑机械化(2022年8期)2022-08-19 08:06:12
起重运输机械(2021年10期)2021-06-15 02:54:28
运输经理世界(2021年2期)2021-03-06 11:56:53
农业装备与车辆工程(2021年2期)2021-02-27 07:58:46
建筑施工(2020年8期)2020-12-01 08:04:34
建材发展导向(2019年22期)2019-12-09 14:45:42
四川水泥(2019年7期)2019-02-17 13:09:22
机械工程师(2018年7期)2018-07-30 09:05:16
中国建筑装饰装修(2018年12期)2018-02-25 01:40:40
中小企业管理与科技(2018年23期)2018-02-07 08:08:14
