基于多跳无线局域网络的多联合收获机速度协同控制
2016-03-23 03:20余良俊席东河汪小志
农机化研究 2016年3期
关键词:机械效率
余良俊,席东河,汪小志
(1.武汉工程科技学院,武汉 430200;2.中国地质大学 机械与电子信息学院,武汉 430074;3.河南工业职业技术学院,河南 南阳 473000;4.武汉理工大学 物流工程学院,武汉 430063)
基于多跳无线局域网络的多联合收获机速度协同控制
余良俊1,2,席东河3,汪小志4
(1.武汉工程科技学院,武汉430200;2.中国地质大学 机械与电子信息学院,武汉430074;3.河南工业职业技术学院,河南 南阳473000;4.武汉理工大学 物流工程学院,武汉430063)
摘要:随着现代化农业科学技术的进步,大面积协同作业逐渐开始应用在机械自动化生产过程中,为了提高联合收获机械装置作业的生产效率,提出了一种多机协同控制的多跳无线局域网络,实现了多机大面积协同化作业控制。利用无线多跳网络,基于地形和地质条件,统一多机作业的速度,根据脱粒滚筒的转速和籽粒的损失率,对协同速度进行优化。为了验证设计的多跳无线局域网多速度协同控制的有效性,对多联合收割机的速度优化效果和籽粒的损失率进行了实验测试。由测试结果可以看出:采用多联合收割机前进速度协同控制后,其机械效率和籽粒的损失率都得到了明显的改善,从而验证了速度协同控制方法的可靠性,为大面积农作物收获机械自动化作业通信技术的研究提供了一种新的无线多跳网络优化方法。
关键词:协同控制;多跳网络;脱粒滚筒;籽粒损失;机械效率
0引言
性能良好的联合收获机应该在不超过额定喂入量和允许籽粒损失量的前提下,在一定的地形和地质条件下具有最大的前进速度。联合收获机前进速度自动控制的目的是保持均匀合理的喂入量,使脱粒滚筒和螺旋输送器等主要工作部件的负荷稳定。随着大面积作物种植技术的推广,单一的联合收割已经不能满足大型机械化生产的需要,需要使用多台机械联合控制的方法,通过并行作业的方式,才能完成作物的联合收割任务。
为了满足多台联合收割机的联合控制,首先要控制单台收获机独立完成任务时的最优速度和最佳路径,然后将速度和路径控制指令传输给其它联合收获机。但是,信息的传递需要通过网络通信,在没有基础通信设施的情况下,在距离较远的两台联合收割机直接可以使用多跳网络通信。多跳无线网络不需要基础设施、高度自治,因此其无法或不方便建立基础设施及只需临时性组网通信的应用场景,并且多跳无线网络仍将以4G网络不可或缺的组成部分而占据重要地位。多跳网络通信改变了传统依靠基站的通信方式,使多台联合收割机直接可以实现信息共享,便于协同控制,提高了机械控制的效率及大面积作业的机械化程度。
1多联合收获机速度协同控制原理
联合收获机速度的协同控制主要是基于多跳局域网络的联合通信功能。喂入量是联合收获机械的重要设计参数和性能参数,在收割机速度自动控制系统中,可以使用传感器监测滚筒的转速来测量喂入量;而地形和地质条件可以通过联合收获机的阻力负荷反馈调节来实现。联合收获机速度协同控制的基本框架设计如图1所示。
工作时,首先通过传感器采集地形地质条件、收获机滚筒转速、前进阻力的相关信息,然后将信号进行处理,发出调速指令,利用无线多跳网络对多联合收获机协同控制。无基础设施的无线网络没有网络基础设施和中心控制的网络结构,终端节点除了作为通信的终端,还具备路由转发的功能。其基本结构示意图如图2所示。
多跳网络相比单跳无线网络具有明显的优势,并可以使用 IEEE 802.11 DCF 无线链路对网络进行优化,优化模型如图3所示。等待状态同一时刻共享信道且邻近的无线链路中,只有一条链路能占用信道进行传输,而其余所有竞争信道的链路只能进入等待状态,并从其竞争窗口中随机选择一个数值设置其二进制退避计数器。
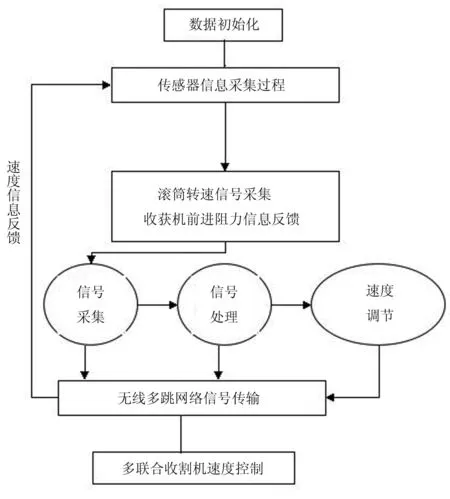
图1 多联合收获机速度协同控制示意图
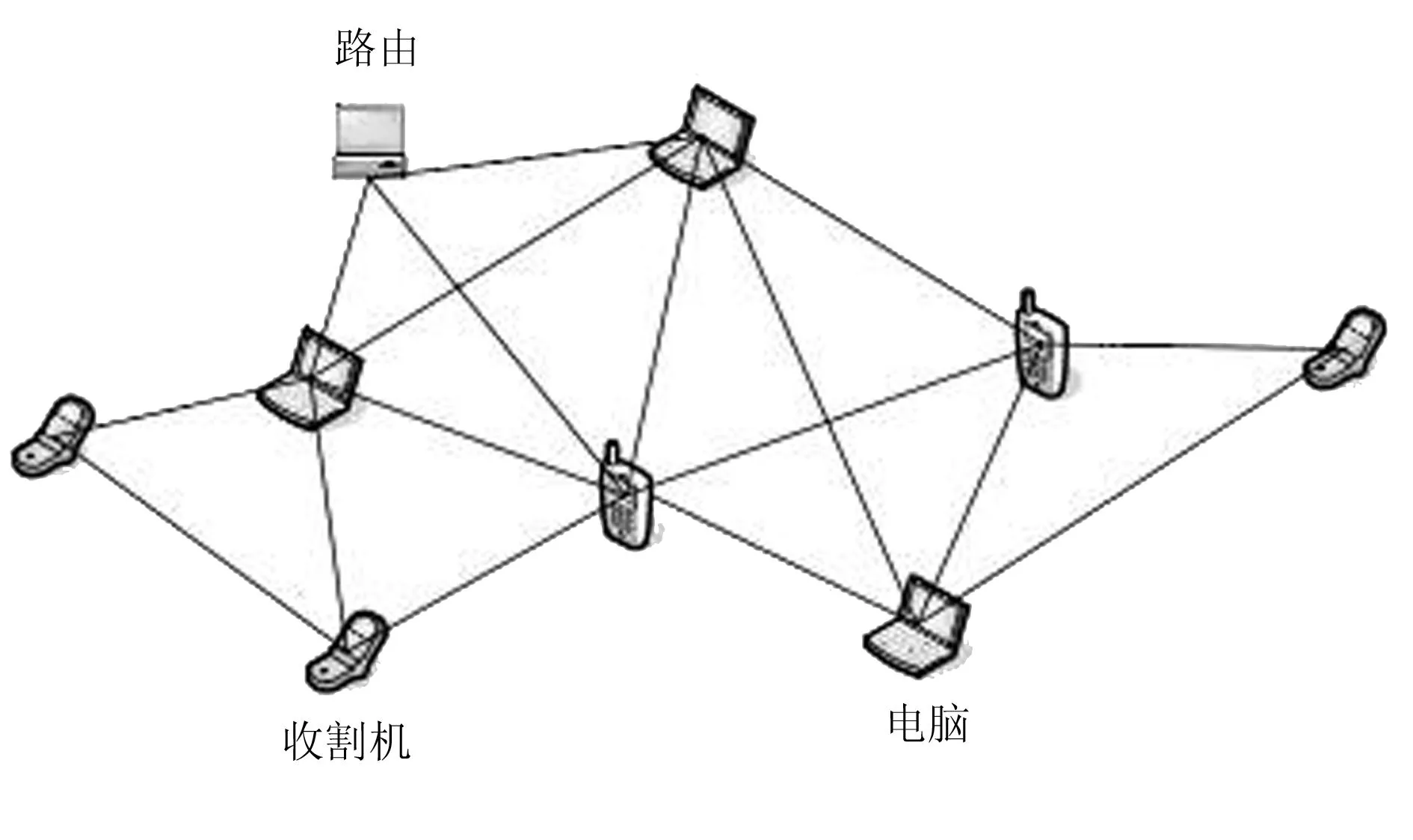
图2 多跳无线网络结构

图3 IEEE 802.11 DCF 无线链路传输模型
2速度协同控制无线多跳局域网设计
为了实现联合收获机多机协同控制,需要首先控制一台收获机的速度,然后根据电机转速来实现多联合收割机的互联通信。单台联合收获机速度控制的基本原理如图4所示。
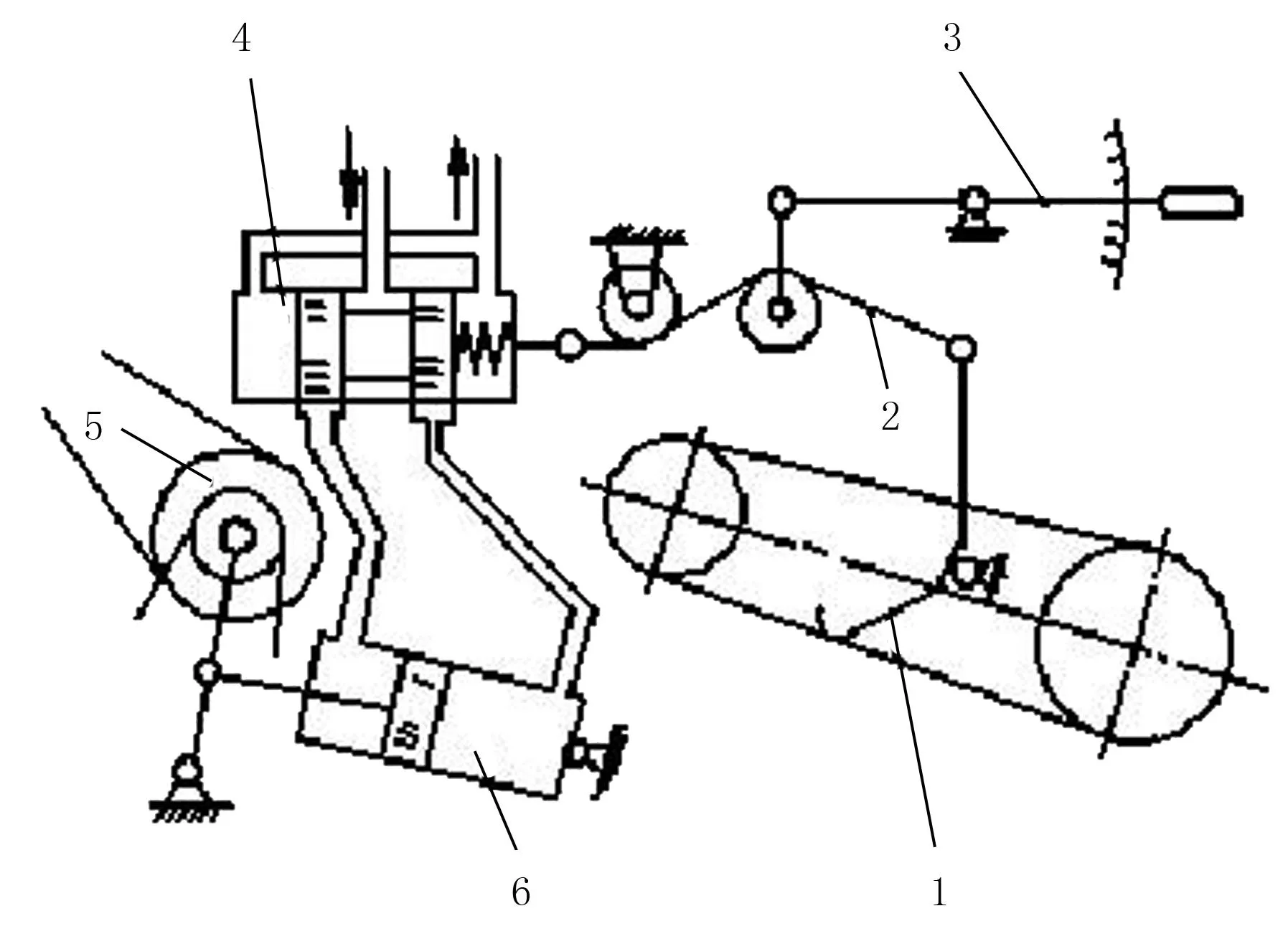
1.传感器滑板 2.拉丝 3.调节手杆 4.分配阀
控制系统中应用的即为机械式喂入量传感器,传感器通过采集信息,获得转速相关的脉冲信号,再通过如图5所示的电路对信号进行处理。
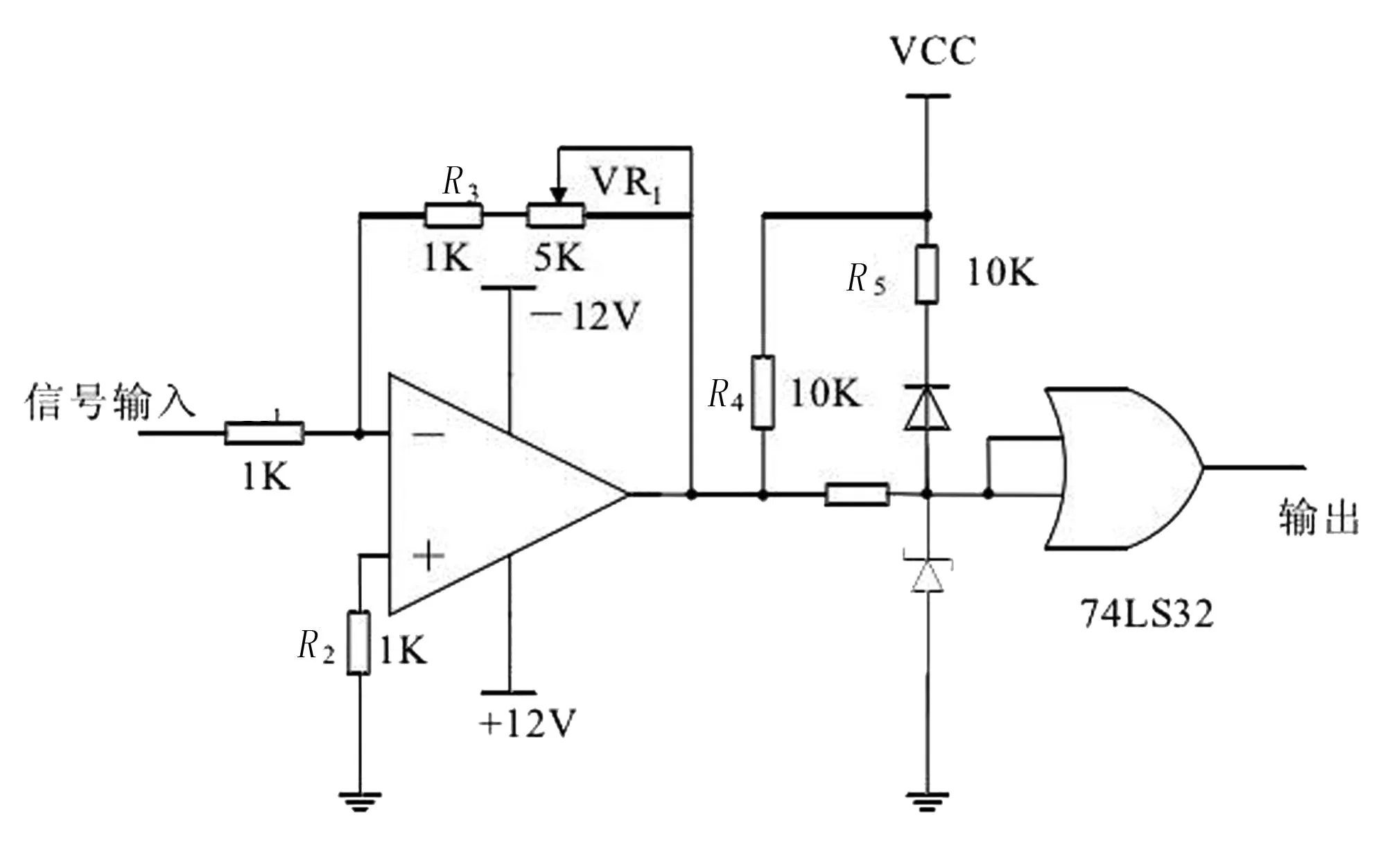
图5 速度信号处理电路
图5中,霍尔开关输出的脉冲信号经过放大后,被5V稳压管稳压,再经74LS32整形后输出;单片机从 T0 引脚接受脉冲信号后进行计算,得出转速,单片机通过如下流程发出速度控制指令,如图6所示。

图6 速度控制指令
为了满足多台联合收割机的联合控制,需要将速度控制指令传输给其它联合收获机,这就需要引入多跳无线局域网络。多跳无线网络没有网络基础设施和中心控制的网络结构,终端节点除了作为通信的终端,同时还具备路由转发的功能,其时延特性的模型为
(1)
其中,St为最大退避阶段,N为链路的期望传输次数,φ是退避时隙,通常为几十微秒。函数E从无线链路的竞争窗口CWj中随机地选择第j次传输尝试的退避计数值,CW0是链路的初始竞争窗口。在多速度协同控制时,需要尽量地规避时延区,基于此,本次研究引入了RTS/CTS访问模式,其结构原理如图7所示。

DIFS: Distributed InterFrame Space CW: Contention Window
各联合收获机的通信方式使用RTS/CTS访问模式,该模式在发送节点与接收节点的DATA/ACK握手之前增加了一个RTS/CTS 握手过程;发送节点和接收节点通过RTS/CTS握手过程预约信道,同时通知其它共享信道的节点回避,实现了联合协同控制。
3速度协同控制无线多跳网络测试
为了验证本文设计的联合收获机速度协同控制无线多跳网络的有效性,本研究对多速度协同控制速度进行了测试,并对其优化路径进行了模拟,最后对其生产效率进行测试。
图8为联合收获机协同作业的示意图。使用速度协同控制后,根据地形和地质条件,结合收获机喂入量和籽粒的损失率,可以对速度和路径进行优化,选取其中3台做速度随时间变化曲线,得到了如图9所示的结果。

图8 多收获机联合作业示意图

图9 收获机速度协同控制
由图9可以看出:随机选取的3台收获机速度随时间的变化曲线基本一致,实现了多机的联合控制,其协同路径如图10所示。

图10 路径优化示意图
由图10可以看出:在多跳局域网络的控制下,收获机的路径由单任务转换为并行任务模式,实现了联合协同控制。
表1和表2分别表示在速度协同控制和非协同控制下机械效率和生产效果对比。由表1、表2可以看出:使用多联合收获机速度协同控制后,大大提高了机械作业的生产效率,缩短了作业时间。

表1 联合收获机协同控制机械效率
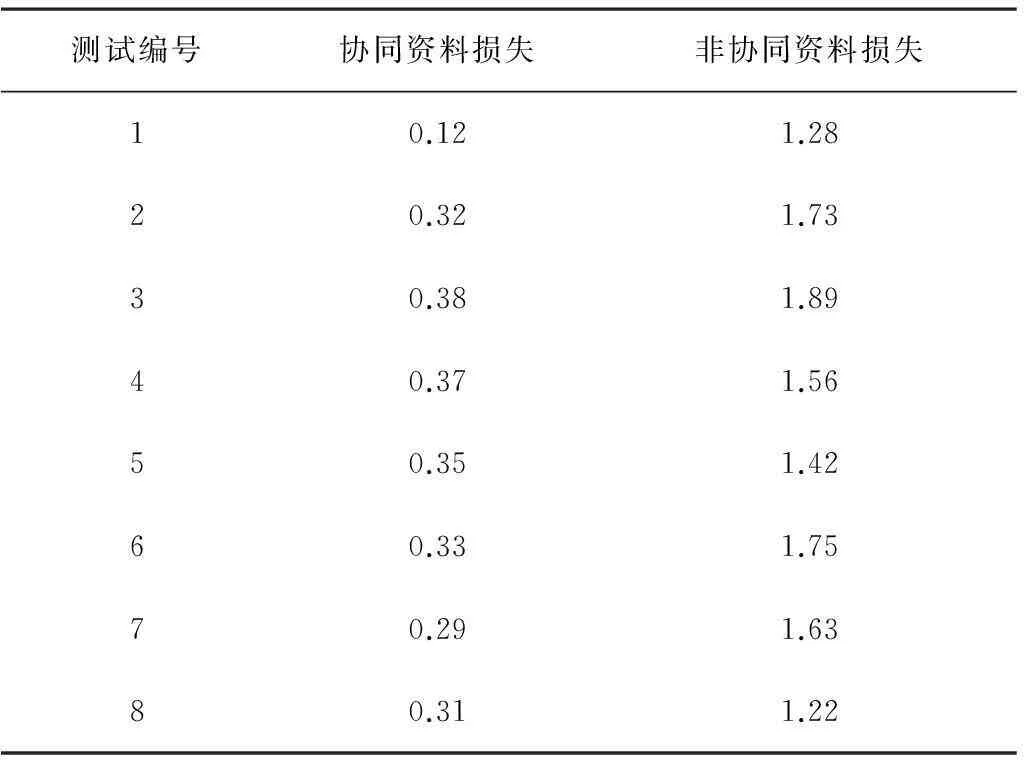
表2 联合收获机协同控制籽粒损失对比
为了验证联合收获机速度协同控制对籽粒损失的程度,对比了使用和不使用速度协同控制下的籽粒损失率。由对比结果可以看出:使用速度协同控制可以有效地降低籽粒的损失率,提高作业精度。
4结论
1)为了提高大面积农作物收割的机械效率、降低作物联合收获过程中籽粒的损失,提出了一种新的多联合收割机协同控制方法。该方法采用无线多跳网络对速度指令进行传输,完成多收获机的同步操控。
2)为了验证多联合收获机协同控制的有效性和可靠性,对多跳网络的协同控制进行了测试,得到了使用和不使用协同控制工况下联合收割机速度控制、机械效率和籽粒损失的对比结果。由测试结果可以看出:使用多联合收获机协同控制方法可以大大提高机械作业效率,降低籽粒的损失。
3)该方法在现代化大面积农业生产过程中投放使用,可以有效地提高作物的收获速度和精度,且该技术在耕地、施肥、播种和灌溉技术中也可以推广使用,具有很好的适应性。
参考文献:
[1]秦国成,秦贵,张艳红.设施农业装备技术现状及发展趋势[J].农机化研究,2012,34(3):81-82.
[2]张宁,廖庆喜.我国小粒径种子播种技术与装备的应用与研究进展[J].中国农机化,2012(1):93-96,103.
[3]郝金魁,张西群,齐新,等.工厂化育苗技术现状与发展对策[J].江苏农业科学,2012,40(1):349-351.
[4]罗昕,胡斌,黄力烁.气吸式穴盘育苗精量播种机的设计与试验[J].农机化研究,2010,32(11):130-132,140.
[5]李耀明,梁振伟,赵湛,等.联合收获机谷物损失实时监测系统研究[J].农业机械学报,2011,42(Z1):99-102.
[6]徐立章,李耀明,李洪昌,等.纵轴流脱粒分离-清选试验台设计[J].农业机械学报,2009,40(12):76-79.
[7]唐忠,李耀明,赵湛,等.夹带损失传感器不同安装位置对籽粒检测精度的影响[J].农业工程学报,2012,28(10):46-52.
[8]解福祥,区颖刚,刘庆庭.甘蔗收获机组合式扶起装置设计与试验[J].农业机械学报,2011,42(2):94-97.
[9]赖晓,李尚平,秦志文,等.新型甘蔗收割装置的仿真分析与试验研究[J].农机化研究,2011,33(2): 102-105.
[10]王健康,吴明亮,任述光,等.往复式切割器传动机构运动动力学分析[J].中国农学通报, 2011, 27(1):90-194.
[11]李婉,李尚平,刘东美.小型整秆甘蔗收获机械喂入机构仿真分析与试验研究[J].农机化研究,2010, 32(7):152-154.
[12]Takuyuki Y, Katsuaki S, Koki I, et al. Application of a Sugarcane Harvester for Harvesting of Willow Trees Aimed at Short Rotation Forestry: an Experimental Case Study in Japan[J]. Croatian Journal of Forest Engineering, 2012, 33(1): 5-14.
[13]宋春华,区颖刚,刘庆庭,等.两段式螺旋扶起机构理论的研究[J].农机化研究,2010,32(11):34-36.
[14]杜现军,李玉道,颜世涛,等.棉秆力学性能试验[J]. 农业机械学报,2011,42(4):87-91.
[15]宋占华,肖静,张世福,等.曲柄连杆式棉秆切割试验台设计与试验[J].农业机械学报,2011,42(11):162-167.
[16]王锋德,燕晓辉,董世平,等.我国棉花秸秆收获装备及收储运技术路线分析[J].农机化研究,2009,31(12):217-220.
[17]李耀明,秦同娣,陈进,等.玉米茎秆往复切割力学特性试验与分析[J].农业工程学报,2011,27(1):160-164.
[18]介战.我国谷物随机损失率测试展望[J].农机化研究,2009,31(7):5-9.
[19]周利明,张小超,刘阳春,等.联合收获机谷物损失测量 PVDF 阵列传感器设计与试验[J].农业机械学报,2010,41(6):167-171.
[20]李俊峰,介战.联合收割机谷物损失测试研究探讨[J].农机化研究,2007(12):248-250.
[21]梁振伟,李耀明,赵湛,等.切纵流联合收获机夹带损失监测方法[J].农业工程学报,,2012,28(Z2):179-183.
Speed Coordination Control of Multi Joint Harvest Machine Based on Multi Hop Wireless LAN
Yu Liangjun1,2,Xi Donghe3,Wang Xiaozhi4
(1.Wuhan University of Engineering Science,Wuhan 430200, China; 2.Faculty of Mechanical & Electronic Information, China University of Geosciences,Wuhan 430074, China; 3.Henan Polytechnic Institute, Nanyang 473000, China; 4.School of Logistics Engineering, Wuhan University of Technology,Wuhan 430063, China)
Abstract:Along with the development of modern agricultural science and technology progress,the application in mechanical automation production process appears in large collaboration areas. In order to improve the production efficiency in the operation of combine harvester device, it presents a multi aircraft cooperative control of multi hop wireless local area network,realizes the multi machine cooperative control of work in large areas.It uses wireless multi hop networks based on jointed multi machine operation speed to control topographic and geological conditions. According to the threshing roller speed and the grain loss rate, it optimizes the speed of coordination. In order to verify the validity of multi speed coordination control based on the multi hop wireless LAN design.it tests the loss optimization effect and the grain velocity on combine harvester rate by using multi combined harvester forward speed coordination control.The mechanical efficiency and the grain loss rate have been significantly improved, which verified the reliability of the speed control method of collaborative. The result provides a new kind of multi hop wireless network optimization method for the study of automation communication technology in the large area crop harvesting machinery.
Key words:collaborative control; multi hop network; threshing cylinder; grain loss; mechanical efficiency
文章编号:1003-188X(2016)03-0222-05
中图分类号:S225;TN925.93
文献标识码:A
作者简介:余良俊(1984-),女,武汉人,讲师,博士研究生。通讯作者:汪小志(1981-),女,武汉人,讲师,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金项目:湖北省自然科学基金项目(2014CFC1079);湖北省自然科学基金计划面上项目(2013CFB418)
收稿日期:2015-02-14
猜你喜欢
中学生数理化·八年级物理人教版(2020年8期)2020-11-06
学习周报·教与学(2020年25期)2020-10-21
初中生学习指导·中考版(2020年7期)2020-09-10
中学生数理化·八年级物理人教版(2016年6期)2016-08-27
初中生学习·高(2016年7期)2016-05-14
初中生学习·高(2016年8期)2016-05-14
中学生数理化·八年级物理人教版(2015年6期)2015-08-30
物理之友(2014年3期)2014-08-28
新课程·中旬(2009年11期)2009-07-01
中学理科·综合版(2008年1期)2008-04-21