
深水半潜式平台系泊系统时域研究
2016-03-18 10:15姜宗玉王爱军
中国海洋平台 2016年1期
姜宗玉, 崔 锦, 董 刚, 刘 婕, 王爱军
(1 挪威埃捷利海洋工程集团,上海201206;2 挪威船级社, 奥斯陆 1363;3 中国船级社天津分社,天津300457 )
深水半潜式平台系泊系统时域研究
姜宗玉1, 崔 锦1, 董 刚1, 刘 婕2, 王爱军3
(1 挪威埃捷利海洋工程集团,上海201206;2 挪威船级社, 奥斯陆 1363;3 中国船级社天津分社,天津300457 )
基于三维势流理论,运用时域动力耦合分析方法,对一座半潜平台系泊系统进行时域分析。模拟计算了不规则波中半潜平台的一阶波频运动、二阶慢漂运动以及系泊缆张力响应,并给出相关历时曲线数据。计算显示,系泊缆张力与半潜平台水平运动联系紧密,在水平自由度内,平台二阶慢漂运动的运动幅度要大于一阶波频运动幅度,对于半潜平台系泊系统模拟,二阶慢漂运动是影响锚泊系统的主要因素。
半潜式平台;系泊;二次传递函数;时域;慢漂运动
0 引言
系泊定位是半潜式平台、FPSO等多种浮式海洋结构物广泛应用的定位形式,常用于水深范围在100 m~1 500 m之间的水域,近几年聚酯纤维等新材料锚缆的使用已将系泊系统的适用水深范围扩展至2 000 m。根据分类方法不同,系泊系统可分为分布式/单点式、悬链式/绷紧式、移动式/固定式等多种形式。
浮式结构物在波浪载荷作用下产生波频运动以及二阶慢漂运动,风和流载荷也会推动浮式结构物偏离井口位置,系泊系统依靠系泊缆的拉力抵御以上环境载荷,将浮体的水平位移限制在一个可接受的范围内。因此,系泊问题需要从两方面研究:一是研究浮体在防浪流联合作用下的运动响应;二是研究系泊缆在浮体运动以及环境载荷作用下的动力响应。随着水深的增加,系泊系统的动力学特性以及系泊缆阻尼对浮体运动的影响愈加显著,需要将两方面计算耦合分析,以求出更加精确的计算结果[1]。
Maruo[2]提出基于流体动量守恒的远场方法计算水平方向平均漂移力。Newman[3]提出Newman近似方法,直接利用平均漂移力系数近似求出“非对角线”的二阶传递函数值,这种方法不需求解二阶速度势,因而大大降低了计算量。Faltinsen和Loken[4]通过求解全二阶传递函数,计算了不规则波中水平无限长圆柱的慢漂力,并将该文计算方法的结果和Newman近似方法的结果进行对比。Pinkster[5]完成了二阶慢漂力的计算理论研究,完全考虑了一阶速度势和运动的影响。Hermans[6]总结了二阶慢漂力和漂移阻尼的计算理论,分别对一艘VLCC、一艘LNG运输船和一艘半潜平台进行计算,并将计算结果和试验进行对比。Mavrakos和Papazoglou等[7]对深水浮筒系泊系统的动力学响应进行了试验和数值研究。Cozijn和Bunnik[8]分别运用动力耦合方法和准静定方法对CALM型单点系泊系统进行了对比分析,其结果显示动力耦合方法的结果与试验更加匹配。Teng和Yang[9]对规则波中的SPAR系泊系统分别应用准静定耦合与动力耦合方法进行分析,在模拟深水系泊系统特别是大幅响应时动力耦合具有重要影响。
该文以势流理论为基础,对系泊半潜平台在风浪流联合作用下的运动响应以及系泊缆的张力进行耦合时域模拟。首先在频域内求出全二阶传递函数;其次在时域内求出不规则波二阶波浪载荷,包括平均漂移力(力矩)和二阶慢漂力(力矩),慢漂阻尼根据Aranha[10]提出的近似方法求得,风和流载荷根据风洞试验测量的载荷系数计算;最后将基于系泊缆动力学计算的系泊力代入浮体运动方程进行耦合,模拟了对半潜平台系泊系统起主要影响的纵荡、横荡和首摇运动响应以及系泊缆动力响应。同时,将二阶漂移力的计算与试验结果进行对比,验证了计算的有效性。
1 理论与计算模型
该文所用坐标系皆满足笛卡尔右手坐标系要求:原点o位于静水面,x轴指向艏部,y轴指向左舷,z轴正向竖直向上。
1.1 二阶波浪载荷
波浪中的浮体所经受的水平方向波浪载荷大致可以分为两部分:(1)一阶波浪力,其频率与波浪频率相等,幅值与波幅成正比;(2)二阶漂移力,其幅值与波幅的平方成正比。其中二阶漂移力又可分为平均漂移力和慢漂力两部分。一般情况下,一阶波浪力要远大于二阶波浪力,但是半潜平台系泊系统的纵荡、横荡和首摇固有周期与二阶慢漂力的周期接近,从而产生大幅慢漂运动,对系泊系统具有重要影响。
二阶漂移力可以用以下公式表达:
(1)
可以看出,当j=k时,上式退化为:
(2)
1.2 漂移阻尼
Aranha[10]提出一种计算漂移阻尼的近似方法,规则波中的漂移阻尼系数可表示为:
(3)

(4)
1.3 风、流载荷
引起浮体漂移的载荷除了波浪以外还包括风和流载荷。风和流载荷幅值可根据风洞试验测量的载荷系数计算:
(5)
式中:Cm为风/流载荷系数;β为风/流方向;V为风/流速度。
1.4 系泊缆动力控制方程
假定系泊缆是没有弯曲刚度的细长杆,整条缆位于同一垂直平面。则其控制方程可由以下公式表示:
(6)
(7)
(8)
(9)
式中:m为缆单位长度质量;u为切向速度;v为法向速度;t为时间;φ为缆切向与水平面夹角;man为单位长度缆法向附加质量;T为缆张力;s为缆拉格朗日坐标;w为缆水中单位长度重量;Ft为切向拖曳力;Fn为法向拖曳力;e为应变。
1.5 系泊浮体运动方程
浮体在各种外力(包括系泊缆的张力)作用下产生运动,运动参数的改变导致系泊缆张力改变,考虑系泊系统作用的浮体运动方程可由以下公式表示:
(10)
式中:M为质量矩阵;Ma为附加质量矩阵;x″为加速度;Fwf为一阶波浪力;Fc为流载荷;Fw为风载荷;Fm为系泊力;Fd为阻尼力;Fh为静水恢复力。该文只考虑水平自由度的运动,静水恢复力在水平自由度内
可以忽略。
2 系泊系统与环境参数
2.1 半潜式平台主尺度
该文以一条半潜式平台为研究对象,对其系泊能力进行时域模拟。该平台按照挪威国家标准和DNV规范设计,主要用于北海以及挪威北部海域钻井作业,平台主尺度见表1。
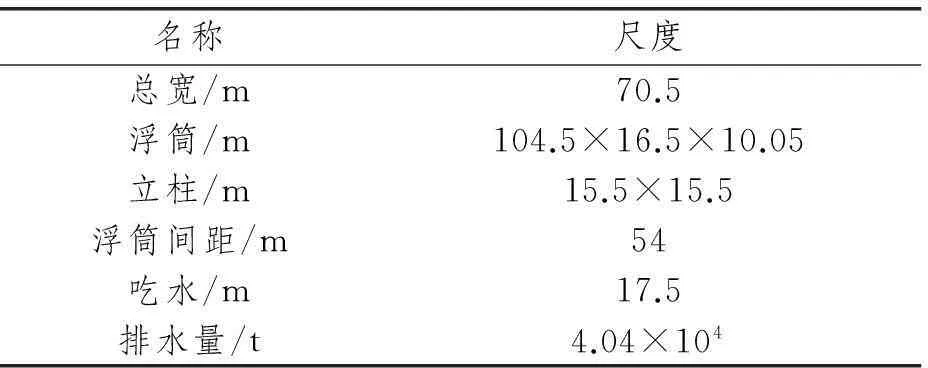
表1 半潜式平台主尺度

图1 系泊系统分布
2.2 系泊系统参数
平台工作水深设定为1 000 m,采用分布式系泊系统进行定位,系统包含8根悬链线系泊缆,每两根一组,分为4组对称布置,系泊系统分布水平示意图如图1所示。每根系泊缆由1 500 m长的锚链和1 470 m长的钢缆组成,锚链和钢缆的参数见表2。
2.3 环境参数
波浪谱选用JONSWAP,有意波高6 m,谱峰周期13 s,谱峰因子3.3。假定流速不随水深变化,流速均匀,速度为0.93 m/s,一小时平均风速设定为19.6 m/s。在假定风浪流同向的情况下对系泊系统进行了3个角度的模拟,角度分别为0°(X轴同向)、45°和90°(Y轴同向)。

表2 系泊缆参数
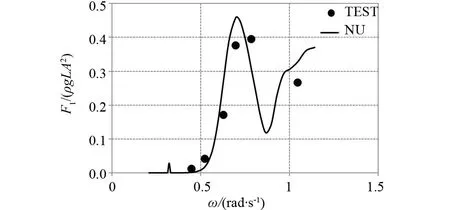
图2 纵荡漂移力,浪向0°
3 计算结果验证与分析
3.1 计算结果验证
为了验证计算的有效性,将二阶漂移力的计算结果与水池试验结果进行对比,图2~图6中TEST代表实验数据,NU代表计算数据。对比显示,计算与试验吻合良好,可以认为该文的计算方法以及计算结果是准确有效的。

图3 纵荡漂移力,浪向45° 图4 横荡漂移力,浪向45°

图5 横荡漂移力,浪向90° 图6 首摇漂移力,浪向45°
3.2 计算结果分析
半潜式平台承受来自不同方向的风浪流载荷。同一时刻内,风浪流三者的方向不一定相同,但是三者同向的情况最为危险,因此在该文计算中均假定三者同向。分别计算了在0°、45 °和90 °三种海况下半潜平台纵荡、横荡和首摇历时曲线以及每根系泊缆顶部张力的历时曲线。计算设定平台的初始状态是位移、速度和加速度均为零,模拟历时10 800 s,近似于一个典型短期海况的时长。
图7显示的是浪向0 °海况下的平台运动轨迹。初始阶段,由于系泊系统的恢复力小于风、流以及波浪平均漂移力组成的与时间无关的平均力,平台总体上与风浪流同向运动。当平台在纵荡方向上位移20 m以后,系泊系统恢复力增大到可以抵消平均力,平台以此位置为中心做回复运动。回复运动主要由周期性的一阶波浪力、二阶慢漂力以及系泊系统恢复力共同作用产生,纵荡运动的回复范围大致在10 m~40 m之间,横荡回复范围在0.4 m~0.7 m之间,可见浪向0 °时,平台运动以纵荡为主。
图8显示的是浪向0°海况下,基于一阶RAO计算的平台纵荡运动与包含二阶运动的平台纵荡运动对比。平台回复运动包括一阶波频分量和二阶慢漂运动分量,基于RAO计算的平台最大纵荡幅值为0.68 m,实际纵荡回复范围大致在10 m~40 m之间,可见二阶慢漂运动是平台运动的主要因素。
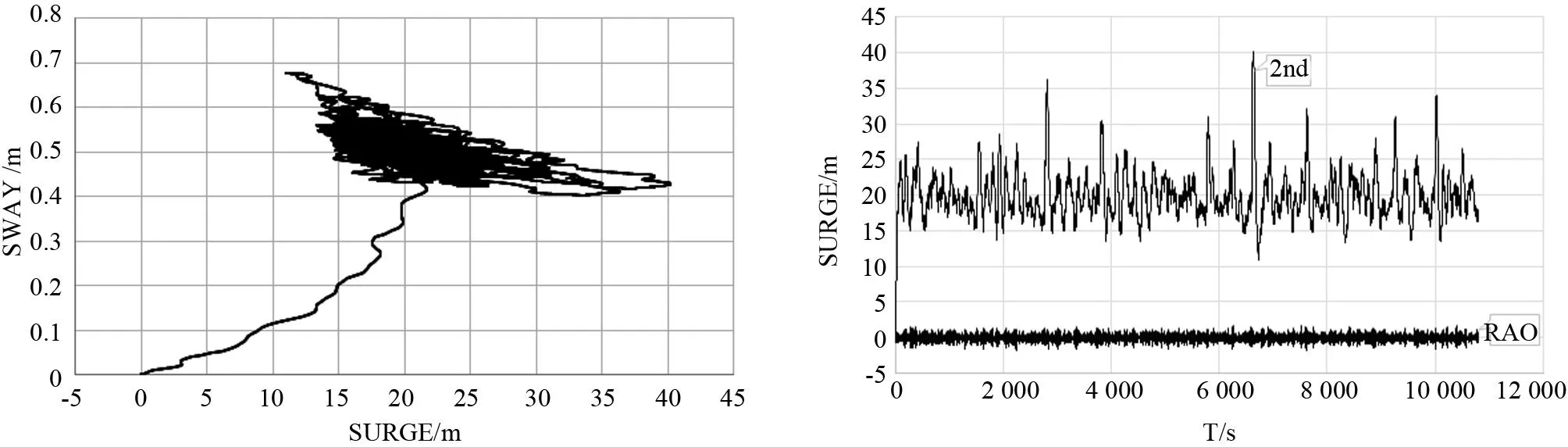
图7 水平运动轨迹,浪向0° 图8 纵荡,浪向0°
图9显示的是浪向45°海况下的平台运动轨迹。初始阶段,平台在风浪流平均力作用下与波浪传播方向同向运动。平台到达系泊恢复力与平均力相平衡的位置后做回复运动,纵荡运动的回复范围在10 m~22 m之间,横荡运动的回复范围在21 m~31 m之间。
图10~图12分别显示浪向45°海况下,基于一阶RAO计算的的平台纵荡、横荡以及首摇运动与包含二阶成分的平台相应运动的比较。对比显示,一阶运动幅值明显小于包含二阶的运动幅值,平台首摇最大幅值1.7°,可见首摇响应相对平和。

图9 水平运动轨迹,浪向45° 图10 纵荡,浪向45°

图11 横荡,浪向45° 图12 首摇,浪向45°
图13显示的是浪向90°海况下的平台运动轨迹。平台在平均力推动到达平衡位置后做回复运动,运动以横荡为主,横荡范围在24 m~44 m之间。图14的对比同样表明二阶慢漂运动是平台运动的主要因素。
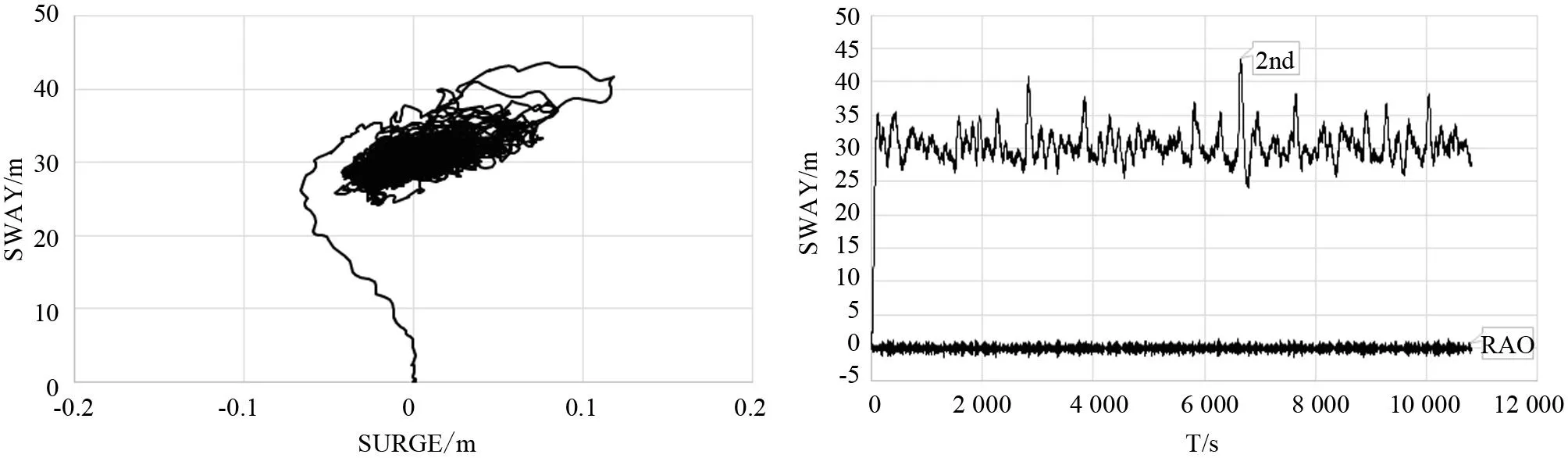
图13 水平运动轨迹,浪向90° 图14 横荡,浪向90°
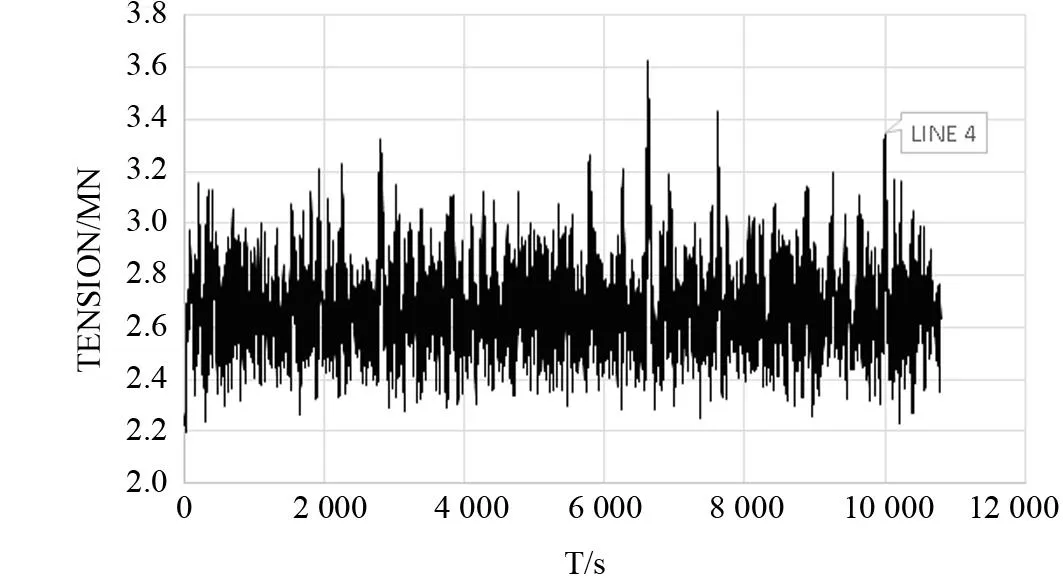
图15 4号系泊缆张力,浪向0°
在浪向0°、45°、90°海况下顶端张力最大的系泊缆分别是4号、3号、2号缆。该文只列出以上三条系泊缆在各自海况下的顶端张力历时曲线,如图15~图17所示。根据系泊缆控制方程,系泊缆长度与张力相关联。当平台漂移远离井口位置必定导致迎浪方向系泊缆伸长,张力增加。观察计算结果,系泊缆张力历时曲线和平台纵荡/横荡历时曲线对比也显示二者趋势相近,历时曲线峰谷几乎同时出现。
表3分别统计了三种海况下平台位移以及最大张力系泊缆顶端张力数据统计,其中平台位移按照以下公式计算:
(11)
式中:x1为纵荡位移;x2为横荡位移。
由表3可知,平台位移的最大值与其平均值的差值在20 m左右,而基于RAO计算的位移相应数据差值均不到2 m;同样,平台位移的均方根差也远大于RAO位移的均方根差,均方根差反应数据的离散程度,可以推断平台水平运动的二阶慢漂分量要远大于一阶波频运动分量。平台在各个海况下的纵/横荡运动谱清晰地显示平台运动主要集中在频率低于0.1 rad/s的频段内,平台运动以低频运动为主,纵/横荡运动响应谱如图18所示。

图16 3号系泊缆张力,浪向45° 图17 2号系泊缆张力,浪向90°

项目T/MNxRAO/mx/mT/MNxRAO/mx/mT/MNxRAO/mx/m浪向04590缆绳编号4--3--2--最大值3.631.7640.213.501.6637.733.381.5143.66均值2.67019.972.95029.312.88030.43均方根差0.170.523.450.130.492.250.120.872.81
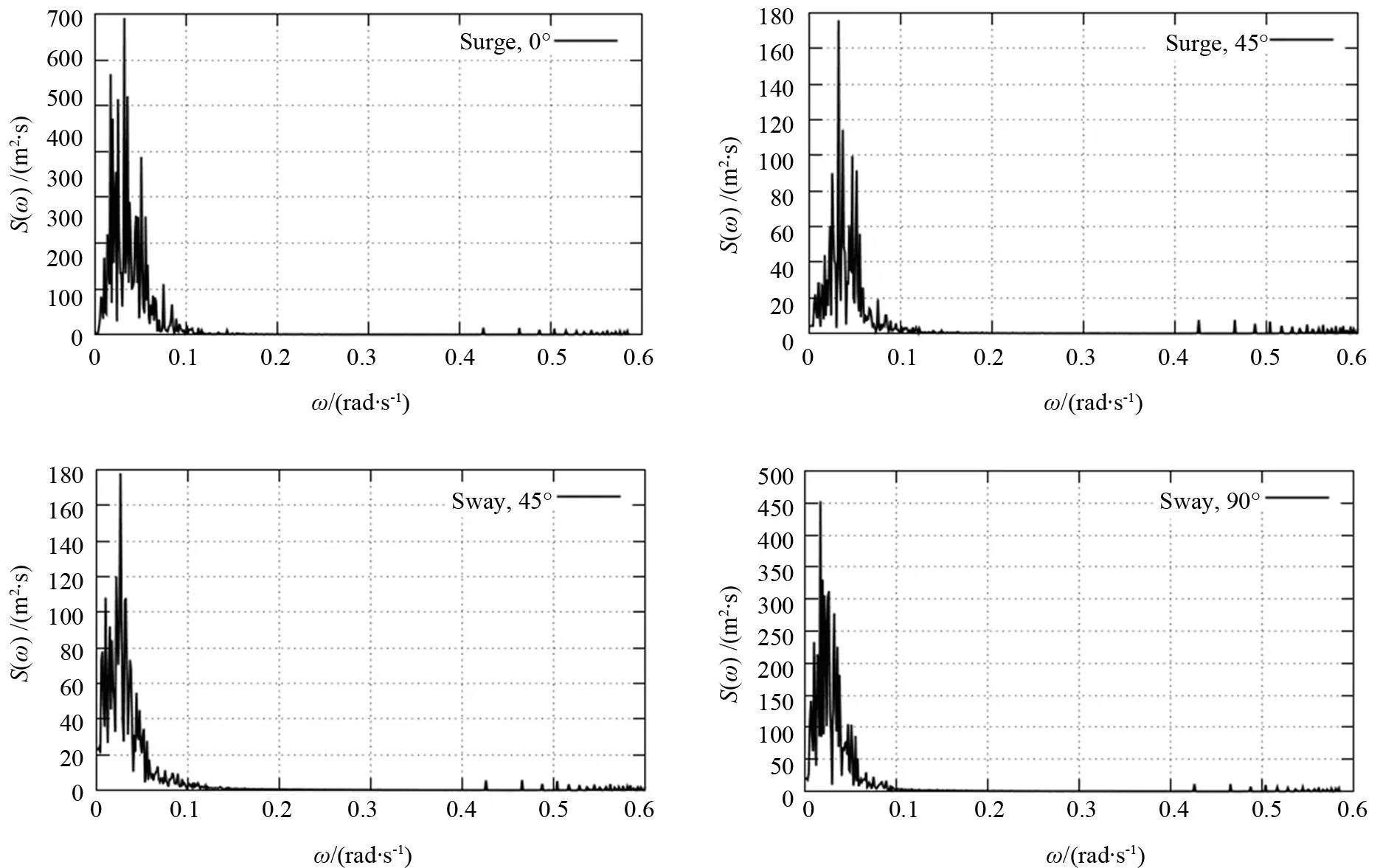
图18 纵/横荡运动响应谱
4 结论
该文对不规则波中半潜平台锚泊系统进行时域动态耦合研究。首先,在频域内计算出全二阶传递函数;其次,在时域内计算二阶漂移力。在计算出平台承受的风浪流载荷后,耦合系泊缆张力建立系泊平台运动控制方程,计算出其运动响应以及系泊缆张力历时曲线。
通过半潜平台运动和系泊缆张力历时曲线以及二者统计数据的对比分析,可以得到以下结论:
(1) 系泊缆张力与半潜平台水平位移联系紧密,将二者耦合计算对于提高计算结果的精确度具有重要意义。
(2) 半潜平台纵荡、横荡已及首摇二阶慢漂运动幅度要远大于一阶运动幅度,半潜平台二阶慢漂运动对系泊系统影响巨大,因此降低慢漂运动幅值在很大程度上有助于降低系泊缆最大张力。
[1] Wichers J E W, Devlin P V. Effect of Coupling of Mooring Lines and Risers on the Design Values for a Turret Moored FPSO in Deep Water of the Gulf of Mexico [C]. Proc. of the 11th ISOPE Conf., Stavanger, Norway, 2001.
[2] Maruo H. The Drift of a body Floating in Waves[J]. J. Ship Research, 1960, 15(4):1-10.
[3] Newman J N. Second Order, Slowly Varying Forces on Vessels in Irregular Waves [C]. In Proc. Int. Symp. Dynamics of Marine Vehicles and Structures in Waves, 1974.
[4] Faltinsen O M,Loken A E. Slow Drift Oscillations of a Ship in Irregular Waves [J]. Applied Ocean Research, 1979, 1(01):21-31.
[5] Pinkser J A. Low Frequency Second Order Wave Excitation Forces on Floating Structures [D]. TU Delft, 1980.
[6] Hermans A J. Lw-frequency Second-order Wave-drift Forces and Damping [J]. Journal of Engineering Mathematics, 1999, 35(3):181-198.
[7] Mavrakos S A, Papazoglou V J, Triantafyllou M S,et al.Deep Water Mooring Dynamics [J]. Marine Structure, 1996, 9(2):181-209.
[8] Cozijn J L,Bunnik T H J. Coupled Mooring Analysis for a Deep Water CALM Buoy [C]. Proc. Of 23rd OMAE, Vancouver, Canada, 2004.
[9] Teng B,Yang M D. Nonlinear Coupled Dynamic Analysis for Waves and a Moored Platform in Time Domain [C]. 26th IWWWFB, Athens, Greece, 2011.
[10] Aranha J A P. A Formulation for ‘wave Damping’ in the drift for a Floating Body [J]. J. Fluid Mech, 1994,38(1):35-40.
Time-domain Investigation for a Mooring System of Semi-submersible
JIANG Zong-yu1, CUI Jin1, DONG Gang1, LIU Jie2, WANG Ai-jun3
(1.Agility Group (China) Ltd, Shanghai 201206,China; 2. Det Norske Veritas, Oslo 1363, Norway;3. China Classification Society, Tianjin 300457, China)
Base on 3D potential theory, a coupled dynamic approach is applied to simulating a mooring system of semi-submersible in random sea. The wave-frequency motion,slow varying oscillation and mooring line tension of the semi-submersible is calculated and presented with duration curves. The calculation result indicates that the mooring line tension is tightly coupled with horizontal motions of platform and the coupling approach is significant. The amplitude of horizontal slow varying oscillation is distinctly larger compared to the amplitude of horizontal wave-frequency motion. The slow varying oscillation is one essential factor to the simulation of mooring system.
semi-submersible; mooring; QTF; time domain;slow varying oscillation
2014-09-22
姜宗玉(1981-),男,工程师。
1001-4500(2016)01-0034-08
P751
A
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
山东冶金(2022年2期)2022-08-08
军事护理(2022年4期)2022-05-08
中等数学(2021年9期)2021-11-22
装备制造技术(2020年3期)2020-12-25
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
船海工程(2015年4期)2016-01-05
舰船科学技术(2015年8期)2015-02-27
湖南师范大学学报·自然科学版(2014年3期)2014-10-24
