异步电机模型预测直接转矩控制*
2016-03-16 02:37朱晓雨彭周华
电机与控制应用 2016年2期
关键词:异步电机
朱晓雨, 王 丹, 彭周华, 刘 星
(大连海事大学 轮机工程学院,辽宁 大连 116026)
异步电机模型预测直接转矩控制*
朱晓雨,王丹,彭周华,刘星
(大连海事大学 轮机工程学院,辽宁 大连116026)
摘要:传统直接转矩控制不仅计算复杂而且对参数依赖大,导致系统控制延时,严重阻碍系统应用。为克服上述难点,提出一种带延时补偿的模型预测直接转矩控制方法,对定子磁链和转矩进行预测,并结合拉格朗日外推法,得到具有延时补偿的控制策略。基于三相异步电机数学模型,以定子磁链和转矩误差为目标函数,通过在线评估开关矢量对电机的作用效果,最终选择使目标函数最小的最优电压矢量。该算法能够有效降低转矩和磁链脉动,减小电流谐波畸变,并且系统结构简单,动态响应较快,解决了传统方法中存在的延时问题。仿真验证了所提方法的有效性。
关键词:异步电机; 模型预测直接转矩控制; 目标函数; 延时补偿
0引言
对于三相异步电动机,近年来学者们相继提出许多新颖、复杂的控制策略。这些控制策略的共同目的是有效降低转矩和磁链脉动,减小电流谐波畸变等[1-2]。文献[3-6]采用直接转矩控制(Direct Torque Control, DTC)和磁场定向控制(Field Oriented Control, FOC),均能实现高性能的动态响应,然而,传统DTC的一个显著缺点是输出转矩脉动大、开关频率不恒定。为解决该问题,文献[7]采用空间矢量调制(Space Vector Modulation, SVM)技术,极大地减小输出转矩的脉动,同时获得了恒定的开关频率。但该方法存在一个调制模块,加大了系统控制的复杂性,并且使用了更多的电机参数。虽然控制性能有所提高,却丧失了DTC控制结构简单的优点。文献[8]采用一种基于简单占空比调节的DTC方法,既能减小转矩和磁链脉动,并且尽可能保持了传统DTC结构简单和鲁棒性强的优点。与SVM技术相比,复杂性有所降低。以文献[9-13]为代表的模型预测直接转矩控制(Model Predictive Direct Torque Control, MPDTC)技术,具有快速动态响应、内部完全解耦和易于引入非线性约束条件等优点,近年来已被广泛应用于电机控制领域。但是,MPDTC控制过程中在线计算量较大,会导致系统控制延时。
本文利用MPDTC思想,进一步以转矩和磁链偏差的绝对值作为目标函数,给出一种新型MPDTC方法,避免定子磁链和电流较大毛刺的出现,减小电流谐波畸变,同时有效降低转矩脉动。首先建立异步电机模型,阐述传统MPDTC基本原理。然后依据推导的预测模型,通过目标函数最优策略在线求得最优电压矢量,从而确立了基于有限集模型预测控制(Finite Control Set Model Predictive Control, FCS-MPC)思想的MPDTC方法。
1三相电压型逆变器驱动异步电机数学模型
图1所示是一个三相电压型逆变器驱动异步电机等效图,异步电机三相负载对称,采用Y型无中线连接。三相输出电流为io,逆变器输入直流母线电压为Udc。
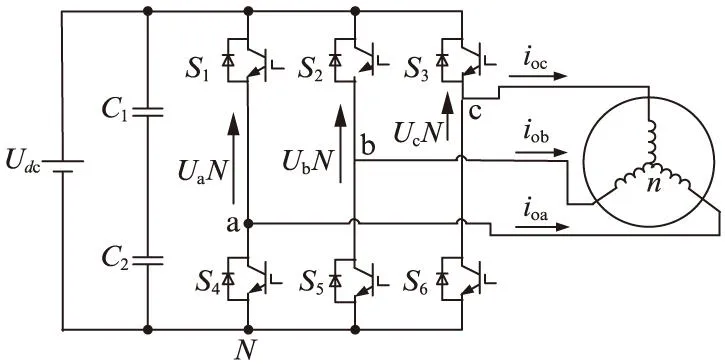
图1 电压型逆变器驱动异步电机电路模型
定义开关函数为

(1)
其中:y=a,b,c。
根据(Sa,Sb,Sc)的不同组合,可以得到八种不同电压矢量,其中U0=U7,这意味着三相电压型逆变器虽然有八种不同的开关组合,但是只可以提供七种不同的电压矢量[14],如图2所示。
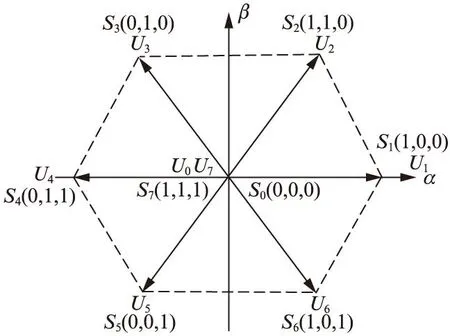
图2 逆变器输出电压空间矢量
异步电机方程为
(2)

(3)
ψr=Lmis+Lrir
(4)
ψs=Lsis+Lmir
(5)

(6)
式中: Rs、Rr——分别是定子和转子电阻;
is——定子电流矢量;
ψs、ψr——分别是定子和转子磁链矢量;
Lm、Ls、Lr——分别是互感,定子自感和转子自感;
ωr——转子角速度;
p——电机极对数。
2MPDTC策略
模型预测控制(Module Predictive Control, MPC)是一种基于离散数学模型的优化控制算法。它具有自适应性及鲁棒性的内在特性[15]。本文提出的MPDTC方案如图3所示。控制回路由一个非线性内部控制器(MPDTC)和一个外部PI速度控制器组成。MPDTC的标准方法是建立一个目标函数模型,利用目标函数最优策略,选择使目标函数最小的电压矢量,以抑制转矩和磁链脉动。通过使用权重因子将转矩和磁链误差放在一个目标函数中。这些因子取决于工作点和系统参数[16-18]。MPDTC的实施强烈地依赖于系统模型,该算法包括一个预测的输出和一个优化阶段。此外,由于定子磁链是不能直接测量的,需要在预测前作出估计,因此变成一个三阶段算法: 磁链估计,磁链和转矩预测,目标函数优化。由于磁链预测来自外环,当前时刻无法得知下一时刻值,需要对其进行预测。

图3 MPDTC框图
MPDTC算法控制过程主要包括如下几个方面:
(1) 测量定子电流is和转子角速度ωr;
(2) 在七种不同电压矢量下,预测转矩T和定子磁链ψs;
(3) 计算预测下一时刻转矩和定子磁链参考值;
(4) 通过目标函数检验七个预测值与参考值的误差;
(5) 选择使目标函数最小的电压矢量并应用于下一时刻;
(6) 在每个采样时间重复以上步骤。
2.1 磁链估计
MPDTC中,在当前采样时刻k,估计定子磁链ψs和转子磁链ψr。
将式(5)用欧拉公式离散化,得到定子磁链估计值:

(7)
为了估计转子磁链,用式(4)来估计转子电流并代入式(5),得到转子磁链方程:
(8)
将式(8)离散化并将式(7)代入,得到转子磁链离散化模型为

(9)
2.2 定子磁链和电磁转矩预测
由于MPDTC中的控制变量是定子磁链和电磁转矩,下一时刻的值无法得到,必须进行预测。定子磁链预测值ψs(k+1)可以通过定子电压方程求得,将式(5)离散化,得到k+1时刻定子磁链离散化模型为

(10)
定子电流is(k+1)的预测通过异步电机定子动态方程获得

(11)

将式(11)用欧拉公式展开,可以得到k+1时刻定子电流is的预测:


(12)
k+1时刻电磁转矩的预测取决于定子磁链和定子电流:

(13)

2.3 目标函数
开关状态的选择由目标函数决定。它对应于转矩和磁链参考值与他们预测值的比较。将最接近参考值对应的一组开关状态应用于下一个采样时刻,也就是说,选择使目标函数g最小的电压矢量:

(14)

2.4 转矩和定子磁链参考值预测
根据MPC的基本原理,为使系统实际输出能够准确、快速地跟踪参考输出,系统k+1时刻的参考值与预测值误差要尽可能地趋近于0。其中转矩和定子磁链预测值由式(10)和式(13)得到,而k+1时刻的参考值由以下2种方法求解。
在采样时间足够小的情况下,可采取近似:

(15)
T*(k+1)≈T*(k)
(16)

T*(k)——k时刻转矩参考值。
当采样周期较大时,如式(15)~(16)所示的近似法容易造成较大的输出纹波,其大小取决于采样周期测量的初始值与控制周期的参考值之间的差值。本文采用末端输出控制方法,下一采样时刻转矩和磁链参考值可以由如下外推公式预测得到:


(17)
Tp*(k+1)=3T*(k)-3T*(k-1)+
T*(k-2)
(18)
仿真中采样周期设定为50μs,所以选择式(17)~(18)所示计算方式更好。
2.5 计算延时补偿
由于MPDTC对所有可能的开关状态均进行预测,其计算量较大,所以对具有复杂拓扑结构的逆变器挑战性更大。例如,在矩阵变换器和中点钳位变换器中,不同电压矢量的个数均为27。因此,在一个较短的采样周期中,很难完成上述计算量,需要考虑程序执行耗时对MPDTC控制效果的影响。
式(17)~(18)所示的方式虽能产生较小的输出纹波,但带来输出平均值的延时,需要对其进行补偿。在实际系统中,采样与控制算法无法瞬时完成,存在着一个周期的控制延迟,也就是说在k时刻的开关状态用在了k+1时刻,即使延迟的时间非常短,如果不对其进行补偿,系统的控制效果也将会受影响。因此,系统的延时可以通过计算下一个采样周期结束时的目标函数g来补偿,即将所选的开关状态应用在第k时刻,就有一个采样周期时间用来采样和计算,避免了MPDTC算法存在的计算延时问题。为此要对转矩和定子磁链参考值进行预测并对目标函数作如下修改:
将下一时刻的转矩和定子磁链参考值修改为

(19)
Tp*(k+1)=6T*(k-1)-8T*(k-2)+
3T*(k-3)
(20)
目标函数修改为
g=|Tp*(k+1)-Tp(k+1)|+

(21)
在该算法中,利用前三个时刻的转矩和定子磁链参考来预测下一时刻的转矩和定子磁链参考值。在当前时刻可以有充足的时间用于计算最优跟踪路径,从而对系统延时有很好的补偿。
系统开始运行时,检测t(1)~t(4)四个时刻的转矩和定子磁链参考值;在第4个周期由式(22)预测t(5)时刻的最优开关状态并将其应用在t(5)时刻,在第5个周期检测t(5)时刻转矩和定子磁链参考值以便于下一周期计算;以此类推。如图4~6所示,分别对比了系统理想情况下,有延时无补偿情况和有延时有补偿情况下系统输出跟踪路径。其中,ψ*、ψ、ψγ分别为定子磁链参考值、可能的定子磁链矢量、选定的最优定子磁链矢量。
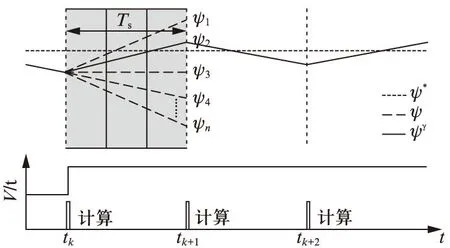
图4 理想情况下跟踪路径

图5 有延时无补偿情况下跟踪路径
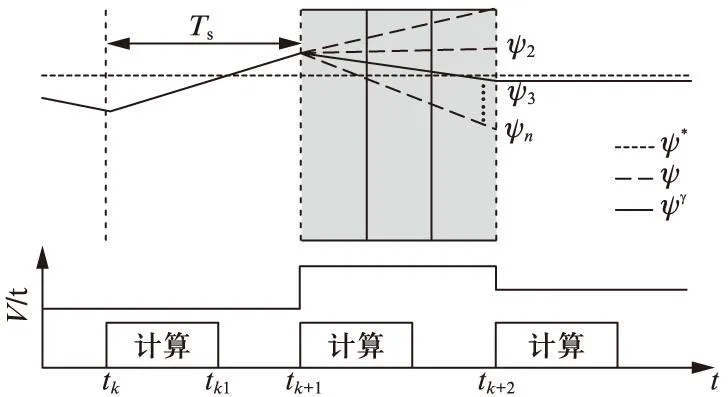
图6 有延时有补偿情况下跟踪路径
由图4可以看出,在理想情况下,由于不考虑计算延时,系统在tk时刻可以将计算所得到的值直接应用于tk+1时刻。在图5中,因为计算延时,在tk时刻由于需要计算下一时刻值,计算值要在tk1时刻才能应用于电机,所以会产生一段延时,这样在tk1时刻,选定的参考矢量方向已经不是当前时刻的最优矢量。在图6中,由于考虑计算延时问题,在tk-1时刻开始计算tk+1时刻的最优开关矢量,所以经过一个周期的计算在tk+1时刻,可以直接将选定的最优开关矢量应用在tk+1时刻。从图中可以很好地看出,系统在考虑延时补偿情况下,跟踪效果更好。
3仿真结果
为验证上述预测控制算法的有效性,本文用MATLAB/Simulink搭建了MPDTC的系统模型。该模型及控制系统的参数如表1所示。

表1 异步电机和控制系统参数
在采样时间Ts=50μs时,稳态和瞬态情况下考虑不同情况的模型预测控制系统仿真结果如7~11所示。
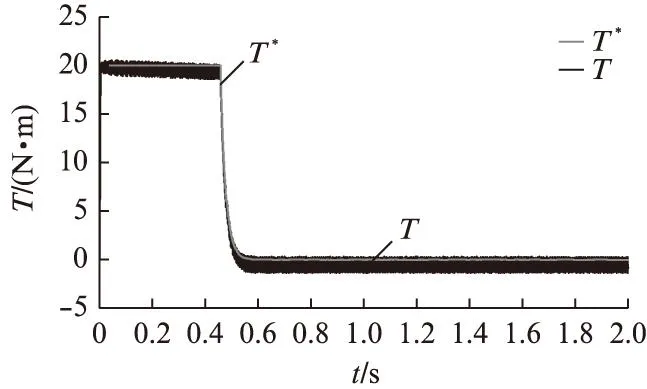
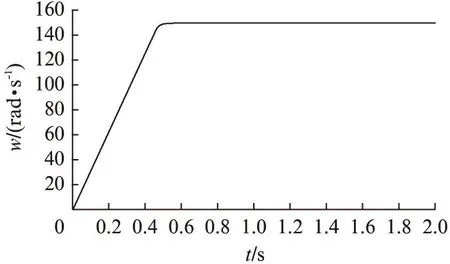
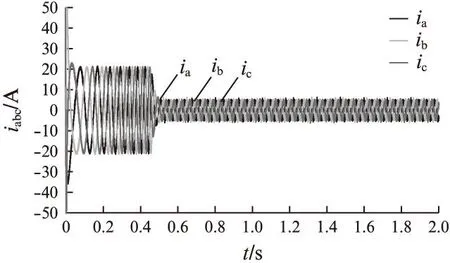
图7 空载起动转速升至150rad/s
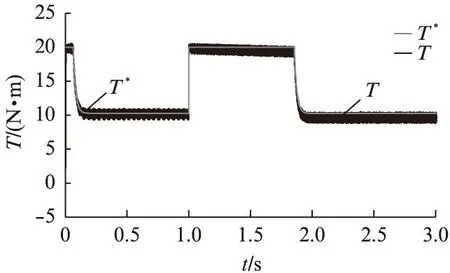
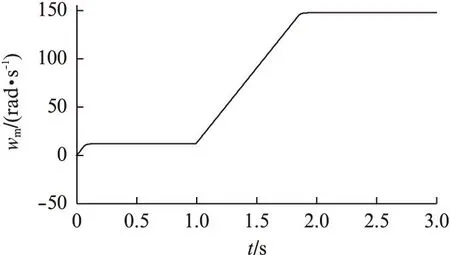
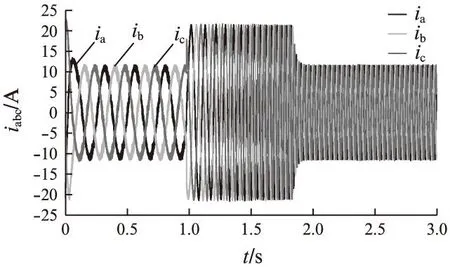
图8 转速从15rad/s升至150rad/s
图7所示为电机空载起动,给定转速150rad/s。由图7可以看出,电机可以很好地跟踪给定转速,进入稳态后,定子电流脉动较小,波形比较平滑。
图8所示是电机半载起动,转速从15rad/s上升至150rad/s。由图8可以看出,电机能够快速跟踪给定转速。
图9所示是当速度给定值为25rad/s时的转速图。由图7~9可看出,电机在高速和低速,空载和满载情况均运行良好,在全速度区内效果都比较理想,速度跟踪值可以快速、准确的收敛到真实值。系统具有良好的动态和稳态特性。
图10为带10N·m负载起动,转速给定为150rad/s,1.5s时转速给定突变为-150rad/s。可以看出,电机正反转切换过程平稳。
图11为突加负载转矩时转速实际值和给定值,转矩、定子电流仿真结果。转速略有下降,但很快恢复至稳态,定子电流幅值稳定、脉动小。可以看出, MPDTC相对畸变率低,跟踪效果好。
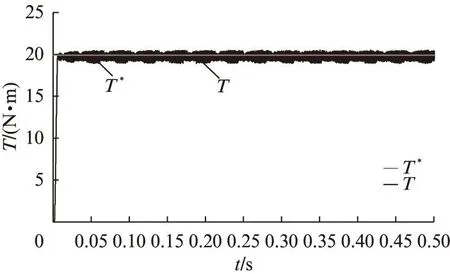
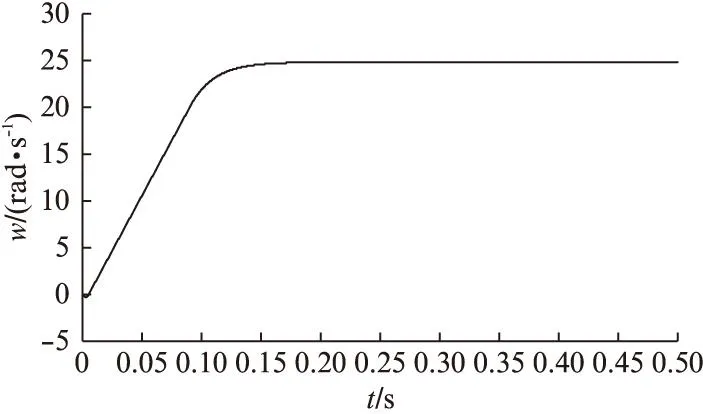
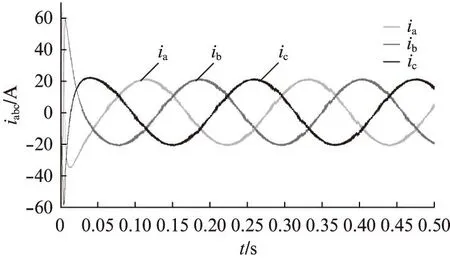
图9 满载起动,转速为25rad/s
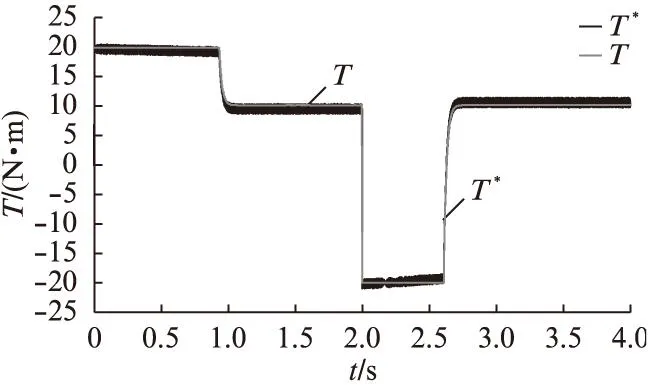
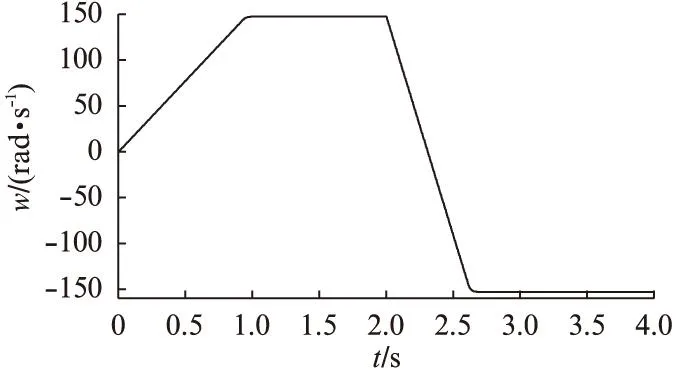
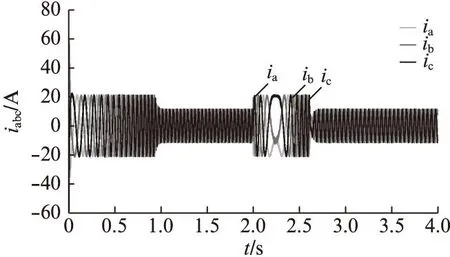
图10 半载起动转速从150rad/s变换至-150rad/s
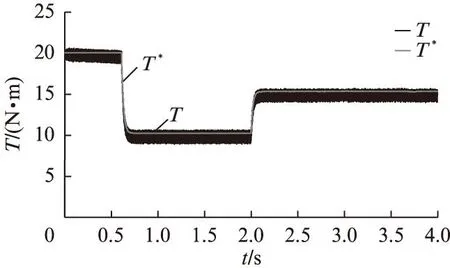
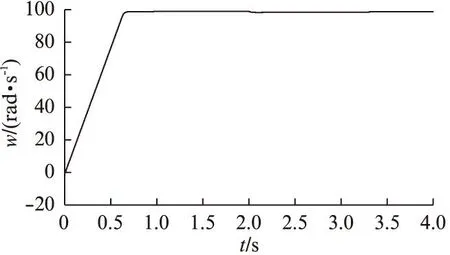

图11 转速不变,转矩增大
4结语
本文以三相电压型逆变器为研究对象,搭建了三相异步电机的仿真模型,采用了MPDTC算法,针对该算法存在的计算量大导致控制延时问题,提出了一种带延时补偿MPDTC策略。通过改进目标函数以及预测转矩和定子磁链参考值,实现延时补偿模型预测控制,目标函数的选择具有灵活性和多样性,易于应用于其他控制目标。给出的MPDTC方法能够有效降低转矩和磁链脉动,减小电流谐波畸变,并且动态响应较快。仿真结果表明,所设计的模型预测控制器在三相电压型逆变器驱动异步电机运行过程中具有良好的静、动态控制性能,同时,能够准确地跟踪参考值,解决了传统方法中存在的延时问题,具有较大的实用价值。
【参 考 文 献】
[1]RODRIGUEZ J, PONTT J, CORREA P, et al. Predictive power control of an AC/DC/AC converter[C]∥Industry Application Conference, 2005(2): 934-939.
[2]DEFAY F, LLOR A M, FADEL M. Direct control strategy for a four level three-phase flying-capacitor inverter[J]. IEEE Transactions on Industrial Electronics, 2010,57(7): 2240-2248.
[3]TAKAHASHI I, NOGUCHI T. A new quick response and high efficiency control strategy for an induction motor[J]. IEEE Transactions on Industrial Electronics Applications, 1986,IA-22(5): 820-827.
[4]BLASCHKE F. The principle of field-orientation as applied to the new transvector closed-loop control system for rotating machines[J]. Siemens Review, 1972,39(5): 217-220.
[5]GEYER T. A comparison of control and modulation schemes for medium voltage drives: emerging predictive control concepts versus field oriented control[J]. IEEE ECCE, 2010(9): 2836-2843.
[6]BLASCHKE F. The principle of field-orientation as applied to the new transvector closed-loop control system for rotating machines[J]. Siemens Revise, 1972,39(5): 217-220.
[7]张华强,王新生,魏鹏飞,等.基于空间矢量调制的直接转矩控制算法研究[J].电机与控制学报,2012,16(6): 13-18.
[8]李政学,张永昌,李正熙,等.基于简单占空比调节的异步电机直接转矩控制[J].电工技术学报,2015,30(1): 72-80.
[9]MIRANDA H, CORTES P, YUZ J I, et al. Predictive torque control of induction machines based on state-space models[J]. IEEE Transactions on Industrial Electronics, 2009,56(6): 1916-1924.
[10]RODRIGUEZ J, KENNEL R M, ESPINOZA J R, et al. High-performance control strategies for electrical drives: An experimental assessment[J]. IEEE Transactions on Industrial Electronics, 2012,59(2): 812-820.
[11]廖永衡,冯晓云,王珍.基于定子磁链滑模观测器的异步电机空间矢量调制直接转矩控制[J].中国电机工程学报,2012,32(18): 88-97.
[12]DURAN M J, PRIETO J, BARRERO F, et al. Predictive current control of dual three-phase drives using restrained search techniques[J]. IEEE Transactions on Industrial Electronics, 2011,58(8): 3253-3263.
[13]FUENTES E, SILVA C, QUEVEDO D, et al. Predictive speed control of a synchronous permanent magnet motor[J]. in Proc. IEEE ICIT, 2009(2): 1-6.
[14]AGUILERA R P, LEZANA P, QUEVEDO D E. Finite-control-set model predictive control with improved steady-state performance[J]. IEEE Transactions on Industrial Informatics, 2013,9(2): 658-667.
[15]DAVARI S, KHABURI D A, RALPH K. An improved FCS-MPC algorithm for induction motor with imposed optimized weighting factor[J]. IEEE Transactions on Power Electronics, 2011,27(3): 1540-1551.
[16]RODRIGUEZ J, PONTT J, SILVA C, et al. Predictive direct torque control of an induction machine[J]. IEEE International Conference on Power Electronics and Applications, 2004: 1851-1858.
[17]KENNEL R, RODRIGUEZ J, ESPINOZA J, et al. High performance speed control methods for electrical machines: An assessment[C]∥IEEE International Conference on Industrial Technology, 2010: 1793-1799.
[18]HOLTZ J. The dynamic representation of ac drive systems by a complex signal flow graphs[J]. IEEE International Symposium on Industrial Electronics, 1994(1): 1-6.
[19]CORTES P, KOURO S, ROCCA B L, et al. Guidelines for weighting factors design in model predictive control of power converters and drives[C]∥IEEE ICIT, 2009: 1-7.
[20]MIRANDA H, CORTES P, YUZ J, et al. Predictive torque control of induction machines based on state-space models[J]. IEEE Transactions on Industrial Electronics, 2009,56(6): 1916-1924.
Model Predictive Direct Torque Control of Asynchronous Motor
ZHUXiaoyu,WANGDan,PENGZhouhua,LIUXing
(College of Marine Engineering, Dalian Maritime University, Dalian 116026, China)
Abstract:There is a large amount of calculation during the traditional model predictive direct torque control (MPDTC)process which leads to the time delay and hinder the application of the MPDTC. In order to solve the problem, presents a novel model predictive direct torque control method based on objective function optimization. A delay compensation-based model predictive control strategy was derived by combining the Lagrange extrapolation and the prediction of the stator flux linkage and torque. Based on three-phase voltage inverter driven induction motor, we established the simulation model of MPDTC. Simulation results showed that the algorithm could effectively reduce the torque and flux ripple and reduce the current harmonics distortion with high dynamic response. Especially, the proposed method could solve the delay problem in traditional method. Simulation results were given to show the effective of the proposed method.
Key words:asynchronous motor; model predictive direct torque control (MPDTC); cost function; time delay compensation
收稿日期:2015-08-20
中图分类号:TM 301.2
文献标志码:A
文章编号:1673-6540(2016)02- 0006- 07
作者简介:朱晓雨(1989—),女,硕士研究生,研究方向为电力电子与电力传动。彭周华(1982—),男,副教授,研究方向为多智能体系统、自适应控制与自主海洋平台的协同控制。
*国家自然科学基金(61273137,51209026);辽宁省教育厅科学研究一般项目(L2013202);中央高校基本科研业务费专项基金项目(3132015021,3132014321)
王丹(1960—),男,教授,博士生导师,研究方向为非线性系统自适应控制、电力电子技术应用等。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
上海大中型电机(2021年1期)2021-06-09
防爆电机(2021年2期)2021-06-09
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电测与仪表(2016年10期)2016-04-12