电动车用开关磁阻电机驱动系统
2016-03-16 02:37李明辉徐少辉
电机与控制应用 2016年2期
李明辉, 徐少辉
(1. 中国人民解放军空军 西安航空四站装备修理厂,陕西 西安 710077;
2. 中国矿业大学 信息与电气工程学院,江苏 徐州 221116)
电动车用开关磁阻电机驱动系统
李明辉1,徐少辉2
(1. 中国人民解放军空军 西安航空四站装备修理厂,陕西 西安710077;
2. 中国矿业大学 信息与电气工程学院,江苏 徐州221116)
摘要:开关磁阻电机具有结构简单、转速范围宽、可靠性强、可控参数多等特点,适合作为电动车的驱动电机。首先介绍了电动车开关磁阻电机驱动系统组成,设计了以dsPIC30F6010A为主控制器和EPM570T100C5N为辅助控制器的车用控制器。设计了逻辑输入和逻辑输出电路,实现输入信号和输出信号的逻辑综合,简化控制系统设计。根据电机不同转速区域,设计了不同的控制策略,提高了电机调速范围和平滑度: 在低速区域内,基于转速电流双闭环控制策略,采用电流斩波控制,限制绕组电流,减小转矩脉动,保证电机转速的稳定性能和跟随性能;高速区域采用电流斩波和开通角、关断角角度控制交错控制的方式,调整绕组导通位置,实现电机宽范围调速的目的。最后,在搭建的试验平台上验证了控制策略的可行性,对转速、电流波形进行了对比和分析,测试了车用开关磁阻电机驱动系统的调速性能。
关键词:开关磁阻电机; 电动车; 驱动系统; 控制策略
0引言
驱动电机的高性能、高效率是衡量电动车产业化高度的重要标准。开关磁阻电机(Switched Reluctance Motor, SRM)结构简单,成本低廉,能够保证频繁起动和四象限运行[1-2],具有很强的再生制动能力,调速范围宽,起动转矩大,容错能力和缺相运行能力强,在很宽的速度和转矩范围内能保证高效率,非常适合于电动车应用场合[3-5]。在各级科研单位对SRM关键技术的深入研究之下,解决好SRM本身存在的转矩脉动大等问题,配合高效的控制策略,SRM能够得到大规模生产,广泛应用于电动车产业。文献[6-7]从公式、电流转速波形、控制策略对SRM进行了系统的描述,表明SRM可以实现四象限任意切换,具有很强的驱动能力和制动效能。文献[8-10]通过改变传统拓扑结构,使SRM更加适用于电动汽车,利用传统的不对称半桥结构和升降压电路相结合,实现了能量的双向流动,提高了储能装置的利用率,增加行车里程,简化了电动车的充电设施。
在本文研究中,首先介绍了电动车SRM驱动系统组成,设计了电动车用控制器及外围逻辑电路。基于电动车驱动电机特性,提出了优化控制策略。低速区采用转速电流双闭环,在保证转速跟随性能情况下,减小转矩脉动,降低噪声;在高速区域,一方面通过电流斩波和开通角、关断角角度控制,能够很好地控制电流峰值大小,从而达到保护器件的目的,另外通过角度优化控制,实现高速跟踪,完成宽范围调速目的。
1电动车SRM驱动系统组成
设计的电动车SRM控制系统由96V蓄电池组、SRM、功率变换器、控制器及检测装置等组成,如图1所示。本系统的控制模块是由微芯公司的dsPIC30F6010A可编程数字处理器和ALTERA公司的EPM570T100可编程逻辑器件组合而成的。位置检测采用的是光电传感器,用于检测转子的位置;电流检测采用的是霍尔电流传感器,用于检测三相电流,不仅可以在控制中使用,也可以作为驱动系统过流保护使用;电压检测采用的是霍尔电压传感器,用来检测蓄电池的电压,防止蓄电池过充和过放电。车载蓄电池组为能量源,通过功率变换器把电能转换为电机的机械能,而三者之间的双向箭头表明在电机制动模式下,依然可以借助功率变换器把电机的机械能回馈到电源,为蓄电池组充电。
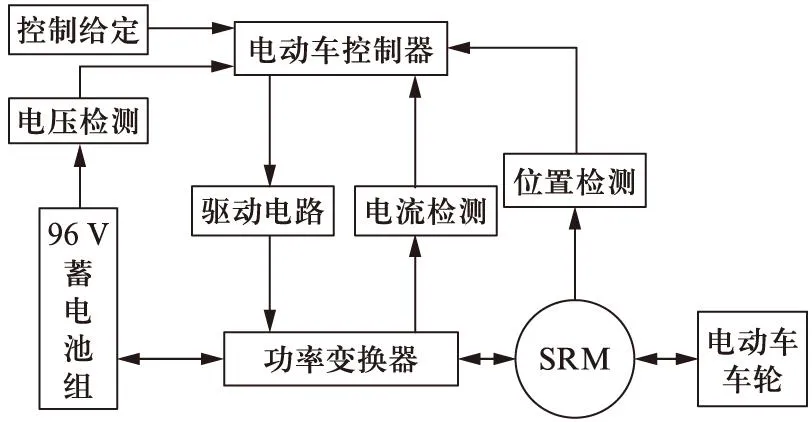
图1 电动车SRM驱动系统结构图
从图2可以看出,控制芯片dsPIC30F6010A主要完成绕组电流、母线电压的检测功能,经由内部的A/D模块处理,完成实时数据采集,为双闭环策略提供数据;利用SPI模块输出串口信号,搭建辅助显示电路,对电机的运行状态有直观的显示;对EPM570T100C5N预处理之后的位置检测信号进行捕获,经过捕获模块的处理,辅以速度闭环控制函数和定时器模块,完成电机的速度闭环控制和实时速度采样,更可完成开通角和关断角角度的调整;经过特定的控制策略处理后得出控制信号,经由输出比较管脚输出到EPM570T100C5N芯片,完成最后的逻辑综合命令;定时器模块在各个模块的使用过程中交错使用,用于电流采样时间的控制、速度数值计算、电机开通角和关断角的控制。保护电路设置在控制板单元和驱动板之间,通过实时的电流反馈,保证电机的可靠运行,防止因电流过大损坏电机本体和功率器件。

图2 电动车SRM驱动控制系统
为了消除干扰,保证信号能够以理想波形输入到控制器管脚被识别,加入施密特整形芯片CD4016,去除毛刺。经过6N137进行电压转化,实现光电隔离,最后通过增加驱动能力的74HC04,输送到控制器芯片EPM570T100C5N,从而完成位置信号的检测功能。图3所示为具体的输入检测电路,3路位置检测信号输入到CPLD芯片。在芯片中经过预处理,预处理功能主要包括两个方面: 为了实现对脉冲信号的细分而做的倍频处理;对信号进行检测,与设定的逻辑顺序进行匹配,如不正确输出保护闭锁信号。因此对于此功能,需要3个输入管脚,7个输出管脚,输出信号包括: 3路对应的位置脉冲倍频信号,3路正常位置脉冲信号,1路输出保护闭锁信号。经过芯片dsPIC30F6010A对脉冲信号的处理,可以确定转子和定子的相对位置,根据控制命令,从而输出相应的信号控制相绕组的通断,使电机能够正常运行;辅以定时器模块,在控制器中通过数字滤波器计算实时电机转速值,保证数据的实时性和准确性,完成转速闭环。
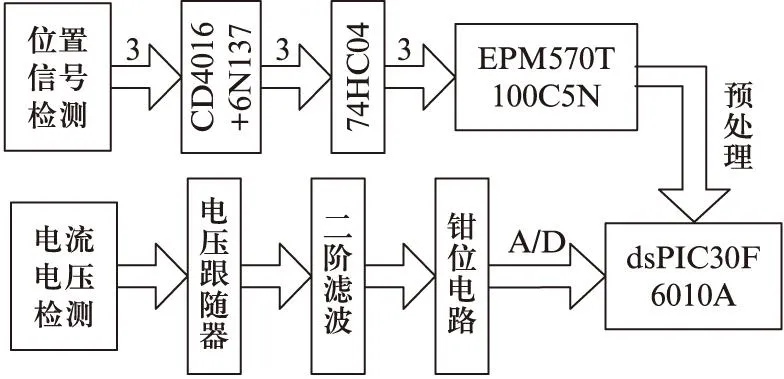
图3 采样逻辑输入电路
对于三相SRM,需要控制的IGBT模块有6个,因此控制器需要输出的信号也为6个。如图4所示,其中三路下管为相控位置信号,三路上管为相控斩波信号,而上管信号是对应相的相控位置输出信号和斩波信号经过“与”门而得。为了提高系统的驱动能力,减小控制芯片的功耗,在输出回路中加入74HC04;经过高速光耦隔离芯片6N136,进行高低压信号的隔离;利用主芯片dsPIC30F6010A输出的自锁信号ZS0来控制数据选择器芯片CD4019,保证信号的输出功能,可以防止控制器受到干扰误输出,保证只有在控制器上电之后才可以可靠输出信号;利用施密特整形电路,去除毛刺的干扰。

图4 控制器逻辑输出电路
2电动车SRM驱动系统控制策略结构框图
SRM在低速起动过程中,转速小,运动电动势小,电流迅速增长,必须对电流限值加以限制,防止对功率开关管器件和电机造成损害。随着电机转速的升高,电机的反电动势增加,电流快速下降。采用电压斩波控制方式,通过调节输入直流电压的PWM占空比,从而更改加到电机绕组两端的等效电压。此种方式,适合在电机中速区域的加速过程,但在PWM电压控制过程中,绕组电流波动效果比电流斩波大,转矩输出不平稳,脉动很大。
当转速超过3000r/min时,电机旋转速度过快,反电动势过大,电流不足以上升到期望值,为了提高电机的输出能力,应该采用开通角和关断角角度控制方式。开通角决定了绕组电流的峰值大小,关断角决定了电流续流开始时间。图5给出了控制策略结构图。
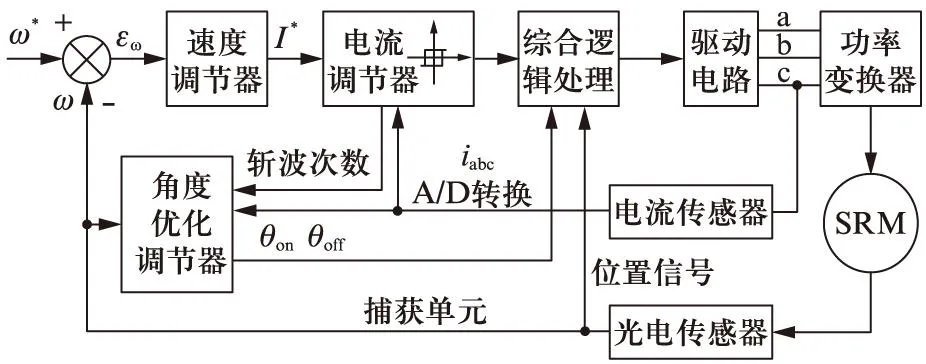
图5 控制策略结构框图
如图5所示,给定转速和实时转速的差值传输到速度调节器环节;调节器内部采用模糊控制算法,输入量为转速差值和差值变化率,输出量为电流的预期限值。经过模糊化,查询模糊推理表,获取模糊量值,最后经过反模糊化,得到最终的电流预期值I*。对每相绕组电流进行采样、滤波、转换,输入到电流调节器,作为实时电流值。电流调节器采用滞环调节器,通过对实时电流值和电流预期值I*进行比较,输出相应功率开关管的开关信号。
在转速较低时,相电流斩波次数超过进入角度优化器的最大值,因此固定开通角关断角,实行电流斩波控制,不进行角度优化,根据捕获信号输出相控信号。随着转速的提升,超过3000r/min时,电流斩波次数小于预设值,进入角度优化器进行角度控制。开通角可以改变绕组电流曲线的幅值,关断角对电流的宽度有影响。调节器采用PI算法,输出量为开通角的变化量,定时器完成偏移过程,输出信号控制功率器件的下管。因此,采用电流斩波控制和开通角、关断角角度控制的交错控制,通过计数电流斩波次数来决定是否进行角度优化。
电流滞环控制器在电机运行过程中始终工作,而不仅仅是在对应绕组通电过程中工作。当电流超过限值,电流斩波信号输出为低;电流低于限值,电流斩波信号输出为高。在其他相工作过程中,该相绕组不通电,采样电流为零,根据滞环控制器原理,输出信号为高电平。因此,最终的上管斩波控制信号,应为滞环控制器输出信号和位置信号相“与”之后的信号,此过程在图5输出信号综合逻辑处理环节中完成,由芯片EPM570T100C5N负责;之后经过逻辑输出电路,在对信号滤波、隔离之后输入到驱动电路,控制功率变换器的功率开关管器件。
3驱动系统试验结果分析
通过搭建硬件测试平台,对电机驱动系统的性能进行测试。测试过程主要分为两部分: 第一部分是测试电机特性,包括不同控制方法的电流波形、位置信号波形和磁链波形,验证不同控制策略的正确性。第二部分是转速跟踪性能测试,测试三种不同的控制方案,选择适合电动车场合的控制方案,并实现宽调速范围。
图6为试验平台,主要包括SRM控制台、测功机、直流电源、上位机、示波器。其中测功机负责测量电机的功率,作为加载设备,完成电机的转矩测量。扭矩传感仪可以把电机的实时转矩输出到上位机,通过对传感器输出脉冲的测量,也可以显示出电机的实时转速值;磁粉制动器和电涡流制动器为电机提供负载,通过控制上位机输出可控电流信号,改变负载大小。

图6 试验平台
3.1 不同转速段的控制方法
图7为电流斩波控制下,转速为500r/min和1000r/min对应的绕组电流波形,此时负载设定为5N·m。其中CH1通道为位置信号波形,是光电传感器的实时输出波形,代表了电机的转子和定子的相对位置;CH2通道为电流波形,纵坐标每一格代表20A;CH3通道为磁链波形,纵坐标每一格代表0.05Wb。图7(a)横坐标每格代表 5ms,图7(b)横坐标每格代表2.5ms。从电流波形中可以看出,通过设定上下限值,电流波形近似为平顶波,在电感最小区电流上升较快,电流前端的波动比较大,斩波比较明显。
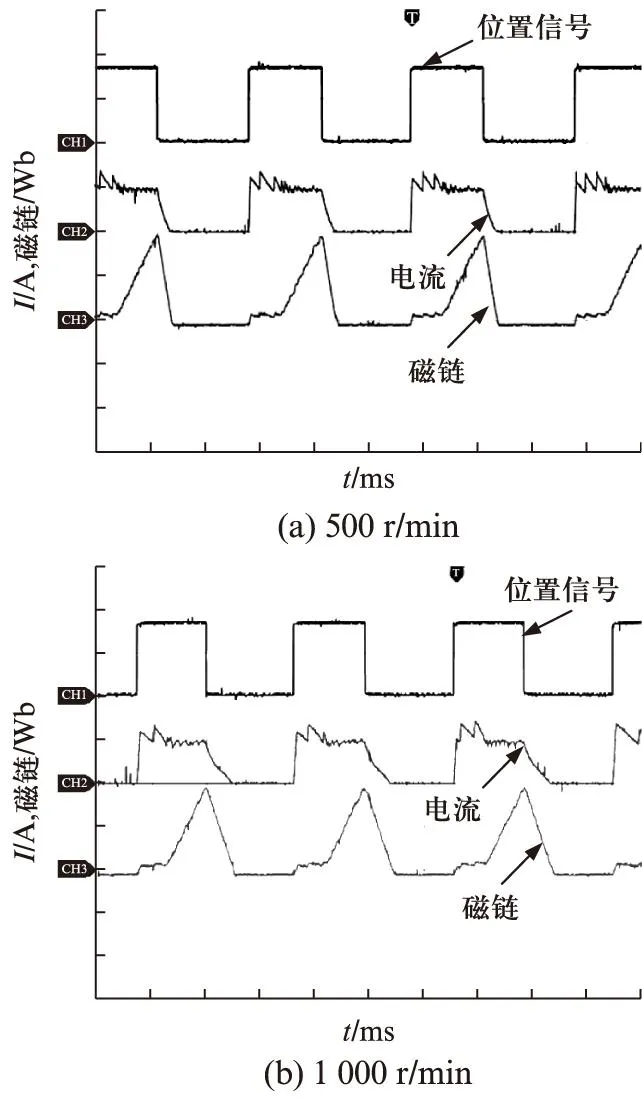
图7 电流斩波控制
图8分别为电压斩波控制下,2000r/min和2500r/min对应的绕组电流波形,此时负载设定为5N·m。CH1通道为对应的斩波信号,电压斩波脉冲频率设定为10kHz,可以看出随着转速的升高,脉冲占空比也在升高;CH2通道为电流波形,纵坐标每一格代表20A;CH3通道为磁链波形,纵坐标每一格代表0.05Wb。横坐标每格都代表0.5ms。
从图8中可看出,随着脉冲占空比的增加,电流转速上升,但是电流波形的整体趋势没有发生变化。在电感上升区导通绕组,电流上升,由于运动电动势的作用,电流下降。与图7对比可以看出,在相同转速、相同负载情况下,电流波动更大,电机输出的转矩脉动更大。因此在低转速区域中,电流斩波控制优于电压斩波控制,输出性能更好,开关损耗更低。
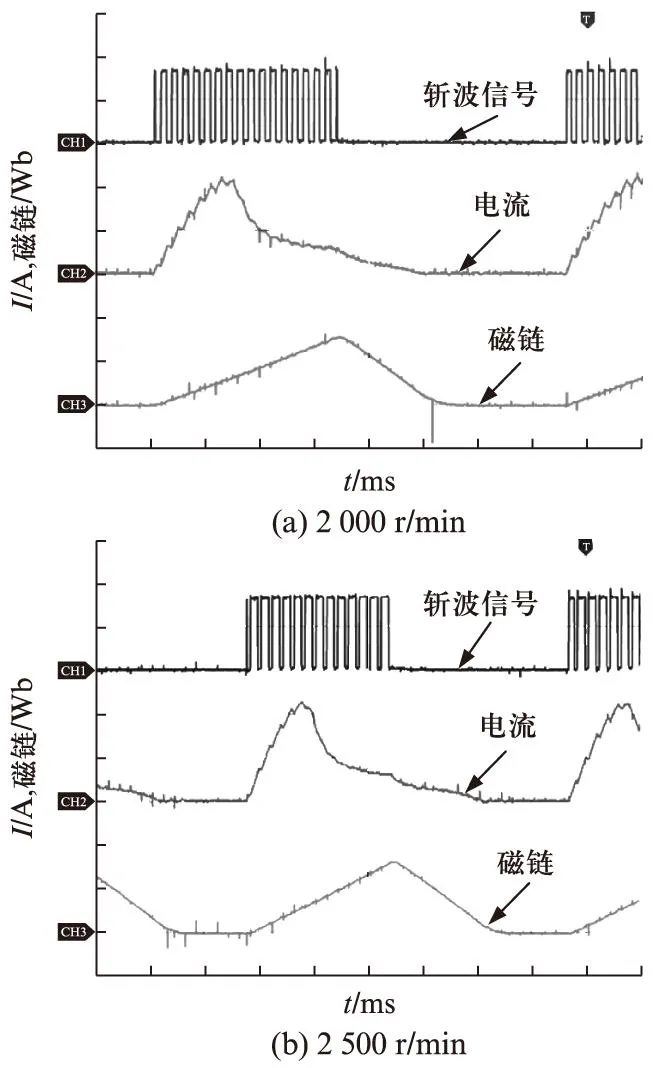
图8 电压斩波控制
随着转速的升高,电流斩波控制中,电流波形不再平滑,斩波次数降低,控制性能下降。因此,随着转速的升高,采用开通角和关断角角度控制方式,通过调节电机的开通角和关断角,实现调节电机的转速。图9分别为开通角和关断角角度控制下,转速为5000r/min和6000r/min对应的绕组电流波形,此时负载设定为5N·m。在控制的过程中,固定开关管开通时间,开通角和关断角同时移动,保证在电感下降区域,电流为零。随着开通角的前移,电流峰值变大,转速上升。
3.2 调速跟踪试验
在电动车正常行驶过程中,存在不可避免的加速和减速操作,甚至因为路况的原因造成速度的突然降低或者突然上升。在本文测试中,对三种控制方案进行测试,测试转速稳定性,并进行分析对比,从而选择最适合电动车场合的控制方案。
方案一: 前文提到的电流斩波和开通角、关断角角度交错控制方式,低速时采用电流斩波控制,高速时采用两种方法的交错控制;
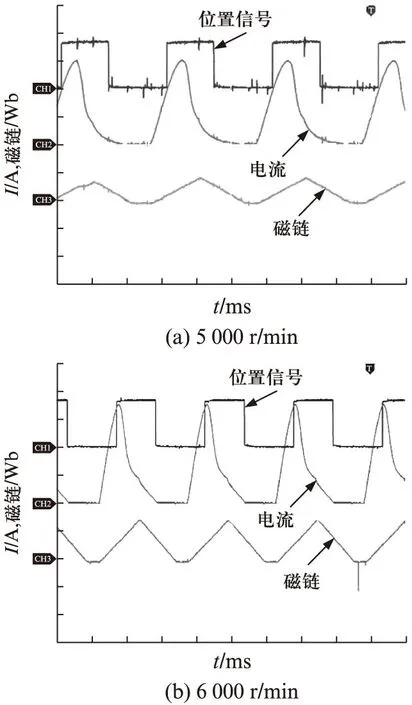
图9 开通角和关断角角度控制
方案二: 低速为电流斩波控制,高速为开通角和关断角角度控制,两者相互独立,分界点为转速值4000r/min;
方案三: 低速采用电流斩波,中速为电压斩波,高速为开通角和关断角角度控制,三者相互独立,分界点分别为2000r/min和4000r/min。
在三种方法中,低速情况均采用电流斩波,转速、电流双闭环控制,选取相同参数值;电压斩波中采用转速环控制,利用模糊控制输出占空比值;开通角和关断角角度控制中利用PI环进行调节,上下管是相同的相控信号。
方案二和方案三均需要在固定的转速值切换控制方式,设置速度滞环进行调节,提高系统的可调性。如果不加滞环环节,在固定的转速值进行控制方法切换,由于参数的不匹配因素,造成转速的突变,从而导致运行过程在两种控制方法之间连续切换,速度在设定值进行波动。加入滞环调节功能,在速度达到上限值时,进行低速控制方式到高速控制方式的转化,初始值为此时速度对应的正常控制量;在速度降为下限时,进行高速控制方式到低速控制方式的转化,初始值为上次加速过程中,到达此速度时的电流限值或者占空比值。
图10中CH1为标志位,CH2为转速曲线,纵坐标每格代表1000r/min,横坐标为时间,每一格代表5s。测量过程中,分别给定两个速度3000r/min和6000r/min,测试其稳定性能和跟随性能。
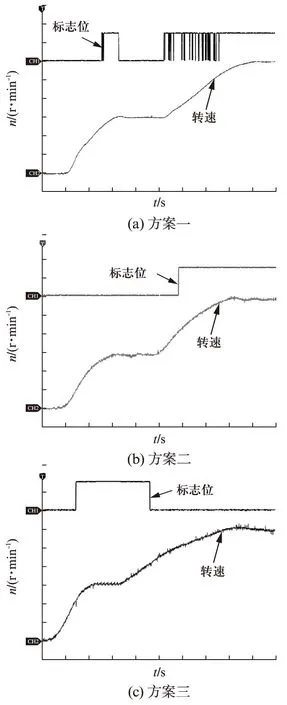
图10 调速跟随性能测试
图10(a)为方案一对应转速上升曲线和标志位情况,高电平代表进入开通角和关断角角度控制模式,低电平为电流斩波控制模式。从CH1通道可以看出,二者是交错调节,通过对斩波次数的统计,判定进入何种控制方法,图中第一次进入开通角和关断角角度控制模式的速度为2600r/min。此方案具有更强的适应性,可以根据负载情况、母线供电电压情况,灵活调整切换速度。
图10(b)为方案二情况下,电机转速上升特性。首先给定电机转速为3000r/min,转速快速上升,稳定在给定转速。此时转速没有到达模式切换速度,仍为电流斩波控制方式,设定目标转速为6000r/min,转速开始上升,在转速超过4000r/min 之后,控制模式转为开通角和关断角角度控制。从CH1通道中可以看出,两种控制方法是相互独立的;从CH2通道中可以看出,对于此两种不同的控制方式,转速上升趋势是相同的。
图10(c)为方案三情况下,电机转速上升特性。三种控制方式分别对应低速、中速和高速区域,且转速分界点分别为2000r/min和4000r/min。
从图10(b)和10(c)可以看出,在低速和中速区域过程中,电流斩波控制和电压斩波控制具有类似的运行特性,为了限值电流值大小、减少模式切换次数,可以采用电流斩波控制方式。在高速区域,电机转子速度快,通过调整开通角增加绕组导通时间,增加电机出力。相对来说,方案一,模式切换速度有很强的适应性,非常适用于电动车应用场合。
4结语
设计了电动车用SRM驱动系统,采用了主辅双控制器系统,并设计了逻辑输入、输出电路。根据电机的特性,设计了宽范围调速控制策略,采用低速和高速分别控制的方法,控制策略保证平滑切换。在低速情况下,为了限制电流峰值、减小转矩脉动,采用电流斩波滞环控制策略,其中外环转速环为模糊控制方式,内环电流环为电流滞环控制,双闭环控制策略保证了转速的跟随性能和电流的稳定性能。在高速情况下,采用开通角和关断角角度控制方式,控制方法采用PI算法,通过前移开通角和关断角,增加电机励磁时间,提高电机转速。在控制过程中,对三种控制方案进行了比较,试验结果表明电流斩波和开通角、关断角角度控制为交错控制方式,适应性最强,非常适用于电动车应用场合。
【参 考 文 献】
[1]刘慧武.开关磁阻电机直接转矩控制系统研究[D].哈尔滨: 哈尔滨理工大学,2014.
[2]CHEN H, GU J J. Implementation of three-phase switched reluctance machine system for motors and generator[J]. IEEE/ASME Trans on Mechatronics, 2010,15(3): 421-432.
[3]王旭东,王喜莲.开关磁阻电动机电流双幅值斩波控制[J].中国电机工程学报,2000,20(4): 83-86.
[4]CHEN H, XU Y, CHING I H H. Analysis of temperature distribution in power converter for switched reluctance motor drive[J]. IEEE Trans on Magnetics, 2012,48(2): 991-994.
[5]梁涛年,李勇,杜吉林,等.12/8极开关磁阻电机双闭环控制系统设计[J].电气传动自动化,2015,37(1): 21-25.
[6]RAHMAN K M, SCHULZ S E. High performance fully digital switched reluctance motor controller for vehicle propulsion[C]∥ Industry Applications Conference, 2001, Thirty-Sixth IAS Annual Meeting, Conference Record of the 2001 IEEE, 2001: 18-25.
[7]SUN J, KUANG Z, WU H, et al. Implementation of a high-speed switched reluctance starter/generator system[C]∥ Electrical Machines and Systems(ICEMS), 2011 International Conference on IEEE, 2011: 1-5.
[8]袁晓玲,王宏华.对降低开关磁阻电动机振动和噪声的两步换相法频域分析[J].电机与控制学报,2006,9(6): 533-536.
[9]BILGIN B, EMADI A, KRISHNAMURTHY M. Comprehensive evaluation of the dynamic performance of a 6/10 SRM for traction application in PHEVs[J]. Industrial Electronics, IEEE Transactions on, 2013,60(7): 2564-2575.
[10]CHEN H, LU S L. Fault diagnosis digital method for power transistors in power converters of switched reluctance motors[J]. IEEE Trans on Industrial Electronics, 2013,60(2): 749-763.
An Electric Vehicle Drive System Based on Switched Reluctance Motor
LIMinghui1,XuShaohui2
(1. Xi’an Sizhan Equipment Repair Factory of Chinese People’s Liberation Army Air Force,
Xi’an 710077, China; 2. School of Information and Electrical Engineering, China University of
Mining and Technology, Xuzhou 221116, China)
Abstract:Switched Reluctance Motor(SRM) is suitable for electric vehicle(EV)’s drive motor due to the merits of simple structure wide speed operation range, high reliability, variable control parameters, etc. Introduced a SRM drive system framework for EV firstly, and a controller based on dsPIC30F6010A and EPM570T100C5N was proposed. Input and output logic process circuits were designed which simplified the control system. Different algorithms were applied for different speed range in order to improve speed adjustable range and smoothness. At low speed stage, the control strategy based on speed and current double closed loop with current chopping control(CCC) was introduced to limit phase currents and torque ripple, which aimed to ensure the speed stability and tracing performance. At high speed stage, CCC and APC(angle position control) were applied in turn. By adjusting conducting angle, wide speed operation range was acquired. At last, experiments were carried out on the prototype to verify the proposed control algorithm’s feasibility. By comparing and analyzing the current waveforms, speed adjustment performance of the SRM drive system for EV was tested.
Key words:switched reluctance motor; electric vehicle; control strategy
收稿日期:2015-07-23
中图分类号:TM 351
文献标志码:A
文章编号:1673-6540(2016)02- 0049- 06
作者简介:李明辉(1975—),男,本科,工程师,研究方向为机电系统控制。徐少辉(1994—),男,硕士研究生,研究方向为电机及其控制。
猜你喜欢
消费电子(2022年7期)2022-10-31
湖北农机化(2020年4期)2020-07-24
汽车与驾驶维修(汽车版)(2020年5期)2020-07-24
21世纪商业评论(2020年12期)2020-01-14
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
北京航空航天大学学报(2017年1期)2017-11-24
中国公路(2017年5期)2017-06-01
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11