
预制装配式停车楼的参数化生成设计
2016-03-09 10:08王其明李宝龙赵妍妍何金生
土木建筑工程信息技术 2016年5期
李 媛 王其明 李宝龙 赵妍妍 何金生 赵 培
(中国航天建设集团有限公司,北京 100071)
预制装配式停车楼的参数化生成设计
李 媛 王其明 李宝龙 赵妍妍 何金生 赵 培
(中国航天建设集团有限公司,北京 100071)
通过深入分析参数化生成设计方法及基于Revit的编程插件Dynamo的优势,本文以预制装配式停车楼为例,研究了停车楼的生成逻辑,并在归并构件族的基础上,展示生成设计中的四个重要环节,实现了输入任意长宽高参数即可自动生成三维模型的程序,同时可通过参数精细化设计构件,为信息传递的真实完整性和未来的3D打印构件打下基础。
参数化设计方法; 生成设计; 预制装配式建筑; 停车楼
【DOI】 10.16670/j.cnki.cn11-5823/tu.2016.05.10
东西方建筑史中都应用过参数化的理念,比如古罗马柱式底部柱径与其他部分之间的比例关联[1]; 《营造法式》[2]中开间、进深、柱径、脊高和斗拱之间的关联,因而可以通过已知某个参数便可确定整个构件或建筑,保证了设计和构件预制精度并提高了施工速度。这一理念在科技长足发展的今天,其内涵和外延又获得了新的拓展。
1 参数化生成设计的概念与方法
提起参数化生成设计,人们更多会联想到其美学上的识别性,即有序复杂的优雅和无缝流动感[3],而这只是其原则性内核的一种外在表现形式。参数化的实质是一个协同概念,是将一个物体中每个部分的约束条件及各部分之间的关系用可变的数值表示,任何一个部分的改变都会引发其他部分的关联性改变[3]。因而,任何用数学关系连接的自变量(自然因素、社会因素和技术因素)和因变量(建筑的几何形态)均属于参数化生成设计。
诚然,这种数学关系有时是环环相扣的,上一个环节的因变量即是下一个环节的自变量(图1)[4],且变量数目不等。

图1 参数间的逻辑关系
2 Dynamo在装配式建筑参数化设计中的优势
Dynamo是基于Revit的参数化编程软件,Revit的建模理念是建筑由各个族构成,而装配式建筑也是由各预制构件组成。因而,相对于其他编程软件,Dynamo具有三个优势:一是可以通过程序直接调用Revit族并改变族实例参数(包括某个参数的数值和用0/1控制的族中组件的可见性); 二是编程结果直接生成Revit三维模型,模型也可在Revit中修改,确定后直接出施工图; 三是Revit还可以自动统计不同类型预制构件的数量,以实现向下游工厂无缝传递信息。
3 预制装配式停车楼的参数化生成设计
下面以长春一汽技术中心研发基地预制装配式停车楼为例,介绍应用Dynamo实现该停车楼的参数化设计和普适性应用。
3.1 项目背景
一汽技术中心研发基地项目总建筑面积46×104m2,其中配建两栋完全相同的七层停车楼(图2),每栋停车楼建筑面积3.9×104m2,停车位1 209个,其标准层面积5 500m2,长104m,宽53m,分三跨,每跨17.5m,采用剪刀梯式双向坡道设计,车位呈垂直式布置(图3~4)。

图2 停车楼透视图

图3 停车楼标准层布置

图4 停车楼剖面图

图5 构件拆分的计算过程

图6 双T板剖面图
3.2 理顺生成逻辑
想要搭建通过输入任意建筑长度、宽度和高度就能自动生成的三维Revit模型,就需要深度挖掘各预制构件尺寸与位置等各参数间的关系,并理顺各参数间生成与被生成的关系。
对本项目起重要制约作用的是跨度为17.5m的横向受力构件——由高强度混凝土和预应力钢绞线制作的双T板(图6),它将梁板合二为一以承载4.0kN/m2的停车活荷载。纵向构件都是为了实现横向构件的功能而存在,因而生成程序需要满足的逻辑关系如下:
1)双T板翼缘长度为0~600mm,梁间距为1 200mm;
2)每块墙板的宽度与其支撑的双T板宽度一致;
3)墙板上牛腿的位置与双T板两个梁底的位置一致;
4)停车楼东西两端非坡道部分是固定不变的,坡道长度是可变的,但坡度不超过5%。
分析理顺停车楼的一层生成逻辑如图7, 2~3层、4~5层和6~7层与一层生成逻辑一致,不赘述。

图7 停车楼一层生成逻辑
3.3 归并构件族
构件族是构成预制停车楼的基本元素,为了便于管理和编程,将建族时构成逻辑相同的构件尽量归并为一个族。比如,本项目中的柱子共有10种不同外形,除了高度不同,大小牛腿的数量和位置亦各不相同(图8),但这些柱子可以归并为一个族(图9),可通过程序调用的参数见图10,利用Dynamo改变柱子族中每个实例的参数见图11。
同理, 6种宽度不同、牛腿数量不同的墙板可以归并为一个族(图12),族中可调用的各参数见图13,利用Dynamo改变墙板族中每个实例的参数见图14。

图8 外形不同的各种柱子

图9 柱子族

图10 柱子族可调用参数

图11 改变柱子实例参数的程序

图12 墙板族

图13 墙板族可调用参数
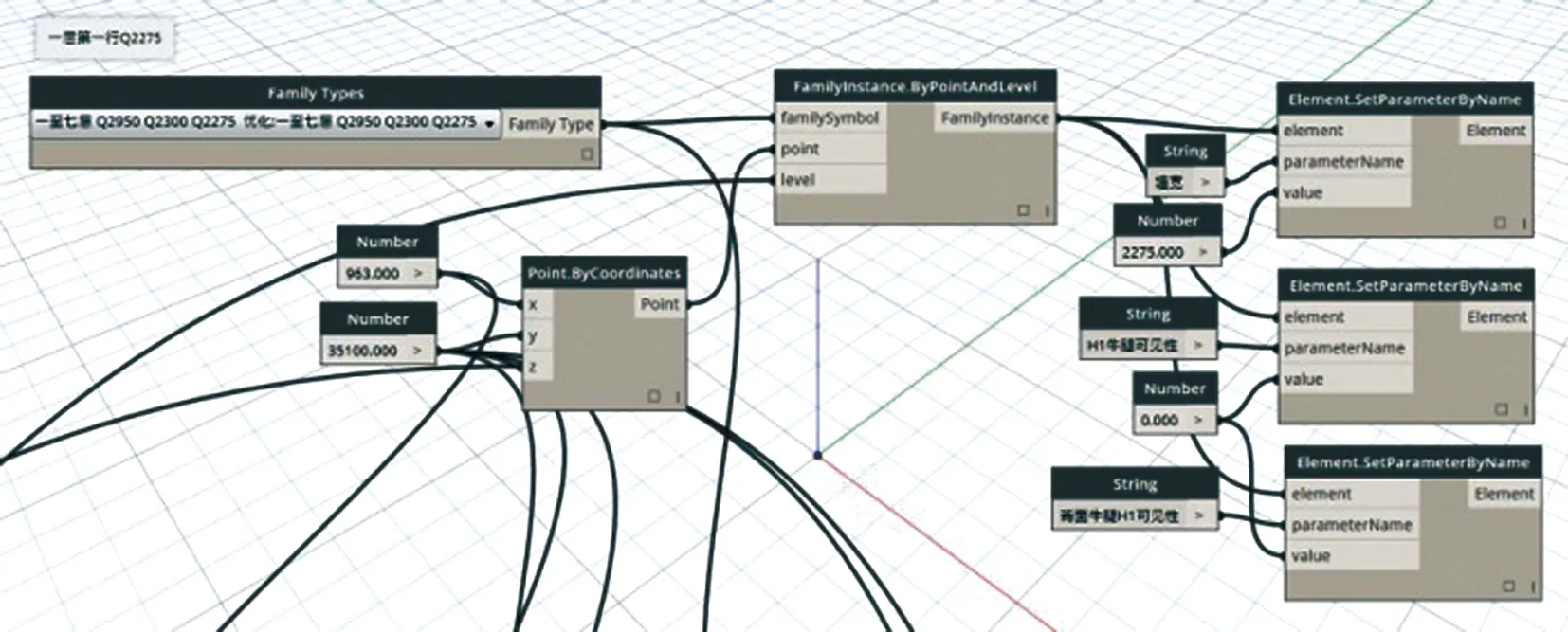
图14 改变墙板实例参数的程序
3.4 编程过程中的重点环节
3.4.1 确保符合规范的剪刀梯坡度
规范中要求斜楼板式汽车库楼板坡度不应大于5%[2],为保证输入任意长度时,能将不满足长度要求的值排除出去,编程时将输入的长度值与层高对应的坡道长度及两端头非坡道部分长度之和相较取大值(图15)。
3.4.2 适应任意长度的构件布置
首先,要确保任意长度下中间标准宽度墙板Q2300的个数是整数个。将上一步结果去除两端非标准墙板的长度后,除以2 400mm(Q2300宽度加板间缝隙100mm)后取整。
而后,确保第四行墙垛的相对均匀分布。该停车楼每两墙垛间都支撑3个双T板,但当长度值为任意时,Q2300墙板的数量被3除的时候会出现
整除、余1和余2三种情况,而墙垛间能支撑双T板的合理数量为2~4个,分别对应余2、整除和余1的情况(图16~17)。

图15 限制坡度的程序

图16 第四行墙垛布置程序
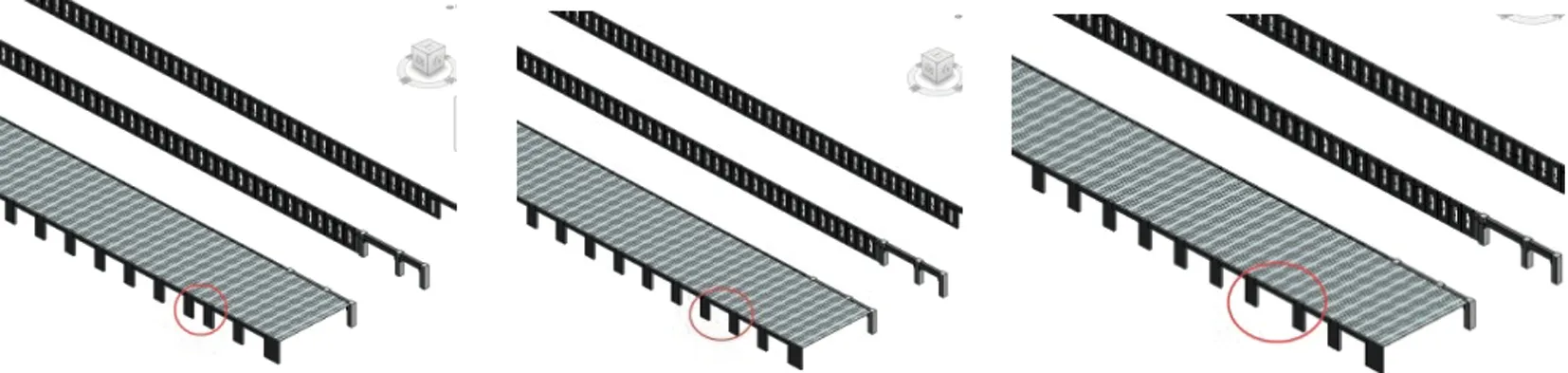
图17 随长度变换间距的墙垛
3.4.3 坡道两侧墙板的牛腿位置
通过等差数列确定坡道上每个双T板上表皮中心位置,而后将其旋转与坡度相同的角度,此时,上表皮中心点与T梁底部中心点位置的关系如图18,分析得出:
Z1=Z+600×sinθ-700×cosθ
(1)
Z2=Z-600×sinθ-700×cosθ
(2)
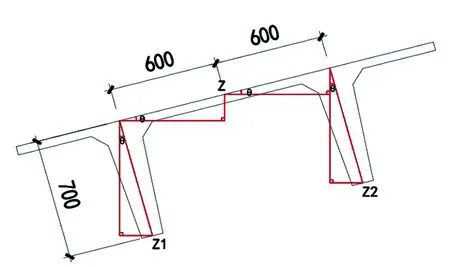
图18 双T板各点位置关系
由此编程得出每块墙板上牛腿的位置(图19),且可以随坡度变化而变化(图20)。
3.4.4 适应任意跨度和高度的构件布置
双T板的跨度可以由参数控制,支撑双T板的各行墙板和梁的间距与其跨度关联; 停车楼高度取
标准层高的整数倍与首层高度之和(停车楼首层因停大客车层高为4.5m,其他层层高均为3.2m),除首层外,墙板均为两层高,每面4个牛腿(图21~22)。

图20 坡道两侧墙板上的牛腿
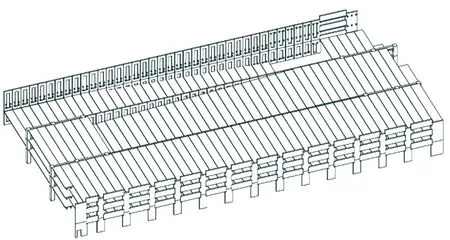
图22 三层高停车楼
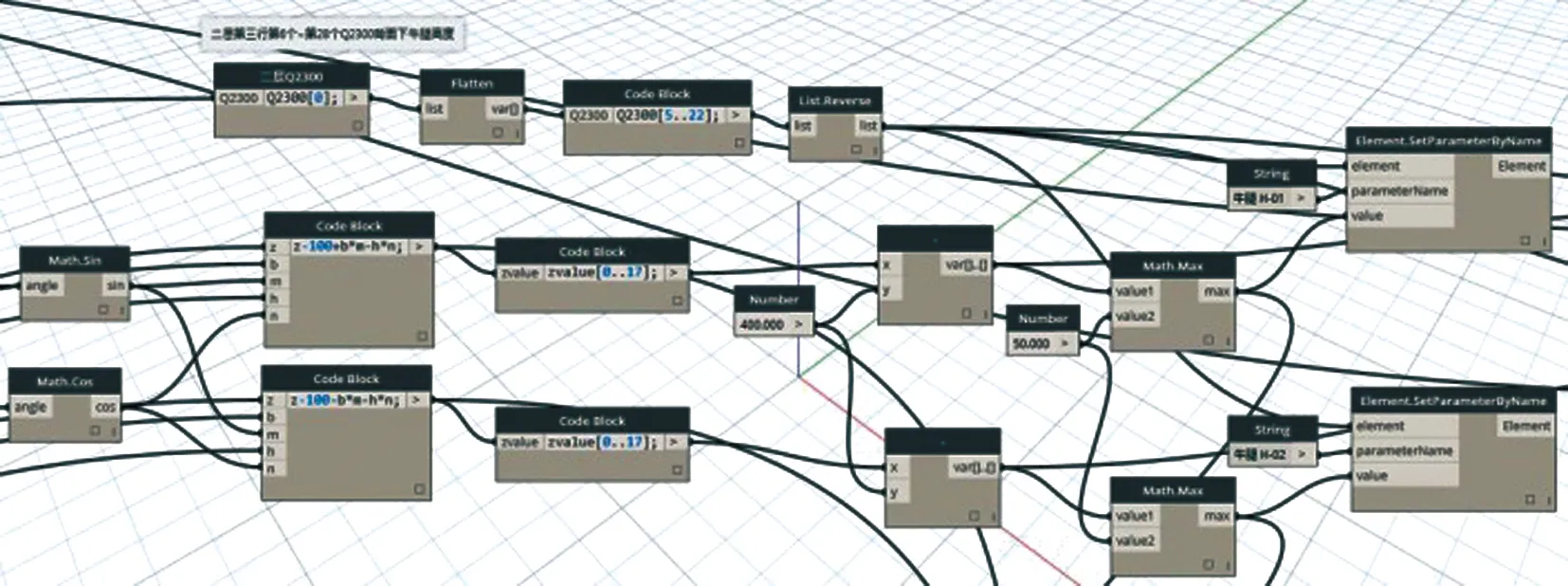
图19 牛腿随双T板坡度变化的程序
图21 二三层停车楼编程
3.5 构件的精细化处理
为了使预制构件信息实现建筑设计与厂家制作的完整对接,需要确保构件细部的准确性。比如,在建筑建模过程中,双T板与梁搭接时的处理方式是用布尔运算减掉双T板上二者的交集,这样两个构件紧挨在一起,没有缝隙(图23),与实际构造不符。为解决该问题,可通过参数控制双T板下的企口位置(图24~ 25)实现虚拟与现实的完全一致。
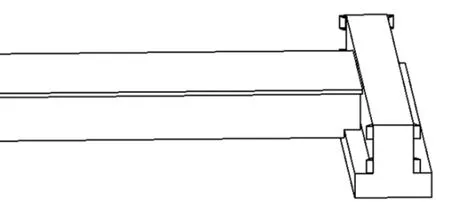
图23 双T板与倒T梁的错误搭接方式

图24 企口双T板

图25 企口双T板可调用参数
尽管目前预制构件厂家还需要将三维模型转化为二维图纸后才能制作构件,但在未来3D打印的大趋势下,虚拟模型的100%真实将发挥更大的作用。
4 结语
参数化设计作为建筑信息化的重要一环,不仅可以提高建筑设计中迭代的速度和设计准确率,更重要的是程序的灵活性和信息向下游传递的真实性和完整性。本文以预制装配式停车楼为例,展示了参数化生成设计方法在具体案例中的应用以及该程序在更多尺寸下的适用性,并探讨了参数控制的构件精细化设计的意义。
[1]陈志华. 外国建筑史(19世纪末叶以前)[M].北京:中国建筑工业出版社, 2010.
[2]李诫. 营造法式[M].北京:中国书店出版社, 2006.
[3]NeilL,YuanPF.ScriptingtheFuture[M].上海:同济大学出版社, 2012.
[4]李媛. 大跨建筑表皮的参数化设计方法研究[D].哈尔滨工业大学博士论文, 2013.
[5]汽车库建筑设计规范(JGJ100-2015)[S].北京:中国建筑工业出版社, 2015.
Parametric Generative Design of Prefabricated Parking Structure
Li Yuan, Wang Qiming, Li Baolong, Zhao Yanyan,He Jinsheng, Zhao Pei
(ChinaAerospaceConstructionGroupCo.,Ltd.,Beijing100071,China)
Based on the analysis of the parametric generative design method and the advantage of Dynamo,which is a parametric programming plugin of Revit,this article takes a prefabricated parking structure as an example to study its generative logic,group the similar components and present four important links of the process.Consequently,the programme can automatically generate a 3D model by inputting any length,width and height and control a component precisely through parameters,which is the foundation of the realness and integrity of the information transmission and 3D printing of components in the future.
Parametric Design Method; Generative Design; Prefabricated Building; Parking Structure
中国航天建设集团有限公司重大自主创新项目“智慧交通中的智能化绿色停车解决方案”(编号:YK2014-004)
李媛(1983-),女,博士,工程师,中国航天建设集团有限公司技术中心BIM技术分中心建筑产业化研发主管。主要研究方向:参数化设计,BIM应用。
TU318
A
1674-7461(2016)05-0051-07
猜你喜欢
建材发展导向(2022年18期)2022-09-22
施工技术(中英文)(2022年14期)2022-08-27
文化交流(2022年8期)2022-08-26
青岛理工大学学报(2022年4期)2022-08-18
建材发展导向(2022年10期)2022-07-28
江苏大学学报(自然科学版)(2022年2期)2022-03-07
上海建材(2021年1期)2021-11-22
建材发展导向(2021年20期)2021-11-20
建材发展导向(2020年16期)2020-09-25
安徽建筑(2020年5期)2020-06-15
