
基于小腿表面肌电的智能机器人协同控制方法
2016-02-24 05:00徐超立吴超华高小榕
中国生物医学工程学报 2016年4期
徐超立 林 科 杨 晨 吴超华 高小榕
(清华大学生物医学工程系,北京 100084)
基于小腿表面肌电的智能机器人协同控制方法
徐超立 林 科 杨 晨 吴超华 高小榕#*
(清华大学生物医学工程系,北京 100084)
作为人机交互的核心内容之一,面向机器人控制的步态识别拥有广泛的应用前景。提出一种基于小腿表面肌电信号的智能移动机器人控制方法。通过优化互信息的最大相关最小冗余算法(MRMR),实现对前进、后退、左转、右转等4种步态分类识别,并建立一套移动机器人同步控制系统。使用表面肌电信号(sEMG)作为输入信息,对人步态动作进行分类识别,并转化为对机器人运动进行控制的信息,从而实现人与智能移动机器人的实时协同交互。通过采集8名受试者前进、后退、左转、右转行走时的小腿表面肌电信号,并实时控制智能机器人的运动。结果表明,在少量的训练条件下,该方法的步态识别准确率可达88%。基于此方法搭建的移动机器人协同控制系统,具有较强的实时控制能力以及较高的控制准确度。基于小腿表面肌电的智能机器人协同控制方法具有良好的应用前景,未来或可广泛应用于人机运动协调机器人控制等领域。
小腿表面肌电信号;步态识别;最大相关最小冗余算法;智能机器人
引言
随着机器人技术的发展,人机交互方式越来越受到人们的重视。作为传统的移动机器人操控方式,遥杆、按键和触控等需要复杂的仪器设备[1],而且操作繁琐,临场感不强。因此,基于表面肌电信号的步态识别等新的人机交互方式成为了研究的热点。
表面肌电信号是一种伴随肌肉活动的电生理信号。由于在肢体运动中,相应的表面肌电信号蕴含了丰富的信息[2],因此可以通过分析不同步态对应的肌电信息来完成步态识别。目前,基于表面肌电信号的步态识别已有一些研究,并且取得了一些成果,其中有通过分析大腿残肢的肌电信号控制下假肢的运动[3-4]和基于粒子群优化-支持向量机方法的下肢肌电信号步态识别[5]。尽管现有的步态识别方法已经取得了较好的效果,但是仍存在3个主要局限:一是现有的大多数方法都需要同时采集双腿的大小腿多组肌肉群的肌电信号,而大腿部肌电的采集常常不方便;二是绝大多数研究较少涉及特征选择,往往都是直接采用某些特征的组合,如果直接将这些特征应用到小腿的步态识别中,分类效果较差;三是应用范围较窄,主要应用于假肢和康复医疗领域。
为了解决上述的问题,本研究在基于表面肌电信号步态识别的基础上,设计了一种智能机器人协同控制方法。通过表面电极,将行走时的肌电信号转换为移动机器人的运动指令,从而让人机交互更加自然、直观和灵活。在本研究中,只利用了单个小腿的肌电信息,并且利用最大相关最小冗余(minimal-redundancy-maximal-relevance, MRMR)算法[6],优选出最佳的特征组合。该算法通过互信息,寻找和类别标签相关度最大而彼此间冗余度最小的特征组合。基于这些特征组合,在Matlab上建立了一套机器人同步运动控制系统,可以利用对步态肌电信号的分析识别、实时观测,通过TCP/IP协议将结果发送给智能机器人进行远程控制。本研究所用的智能机器人是TurtleBot,是一款基于ROS系统的小型移动机器人。ROS是开源的,是用于机器人的一种后操作系统,或者说次级操作系统。它提供类似操作系统所提供的功能,包含硬件抽象描述、底层驱动程序管理、共用功能执行、程序间消息传递、程序发行包管理,它也提供一些工具程序和库用于获取、建立、编写和运行多机整合的程序[7-8]。
1 方法和实验
1.1 系统控制原理
图1给出了基于小腿肌电控制的智能机器人协同控制原理,其系统功能是利用从小腿采集的表面肌电图(surface electromyography, sEMG)信号对人的行走动作进行识别,然后基于识别结果控制智能移动机器人的运动。整个系统由肌电采集模块、模式识别模块和机器人控制模块构成。其中,肌电采集模块采集受试行走中的sEMG信号,将其放大采集后通过蓝牙通信送入模式识别模块;模式识别分析模块对sEMG信号进行预处理、活动段提取、特征提取和分类,然后将分类结果通过TCP/IP协议发送给机器人控制模块;机器人控制模块将不同指令输入给智能机器人,从而控制机器人的运动。
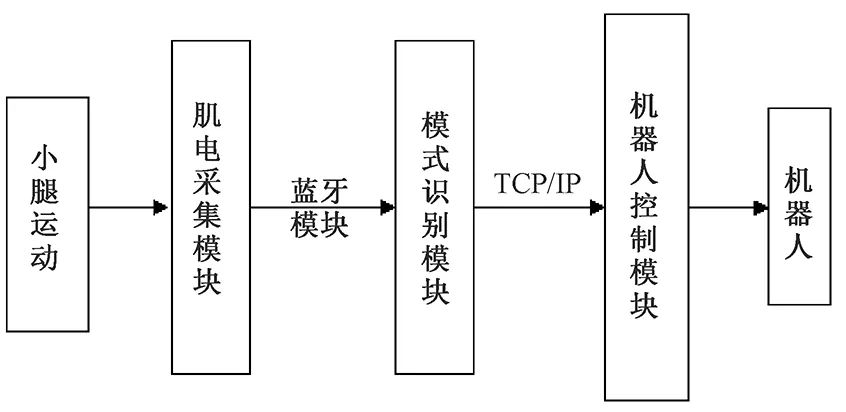
图1 系统框架Fig.1 System framework
1.2 肌电数据采集
1.2.1 行走动作定义
前进、后退、左转、右转等4种步态动作如图2所示。各步态动作与智能机器人操作指令之间的关系见表1。
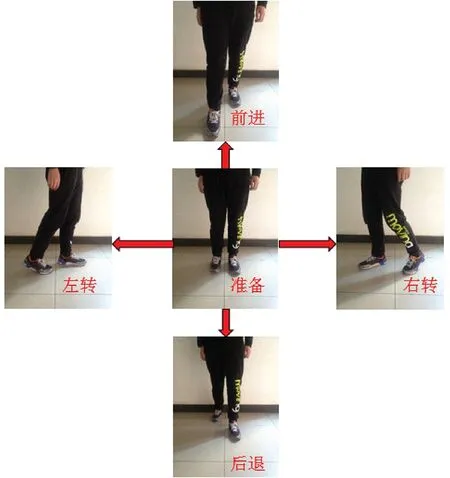
图2 4种步态动作Fig.2 Schematic diagram of four gaits
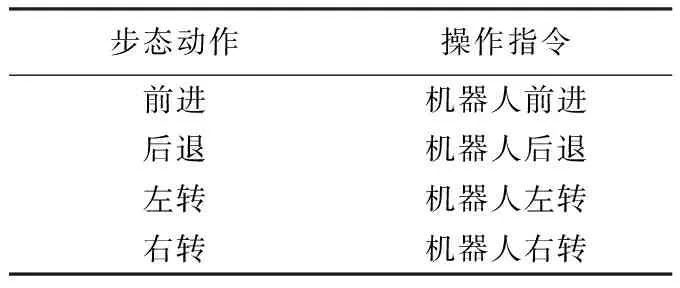
表1 步态动作与操作指令之间的对应关系Tab.1 The relationship between gaits and commands
1.2.2 sEMG信号采集
sEMG信号采集是通过本实验室采购的低功耗无线信号采集模块进行。该肌电采集模块能够采集8通道数据,并通过蓝牙模组将肌电信号发送给模式识别模块。肌电采集装置的采样率为1 kHz。
图3为电极的安置方案,包括8导sEMG电极、1导参考电极和1导接地电极。8通道的电极分别放在腓肠肌上,参考电极放置在脚踝附近,接地电极放在胫骨粗隆附近[9-10]。
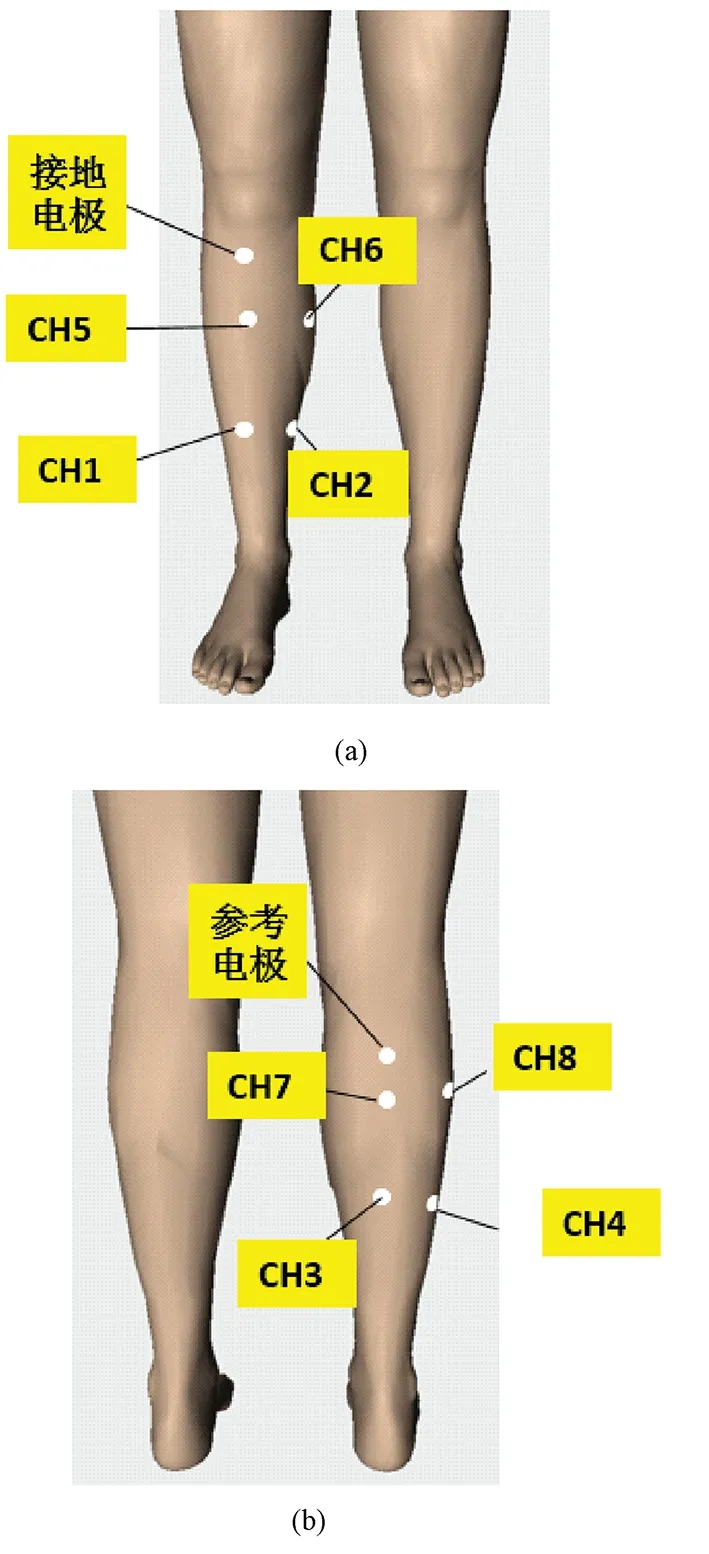
图3 电极的安放位置。(a) 正面;(b)背面Fig.3 Location of electrodes.(a) Front view;(b) Back view
1.2.3 实验数据采集
8位受试者参与了本次实验数据的采集,其中男性7位、女性1位。他们的年龄在25~31岁之间,无运动神经类疾病或障碍。在实验人员指导下, 受试者理解实验过程, 愿意参加试验,均签署了知情同意书。
8通道肌电电极放置于小腿上。在每次实验中,受试者需在用Matlab软件编写的实验程序的提示下,完成相应的步态动作。如图2所示,有前进、后退、左转、右转4种动作,不同的步态动作会随机出现。训练时,每位实验对象分别完成每类动作10次作为训练内容,然后用训练好的分类器对受试者进行测试,每个受试每类控制各进行40次,4种控制共160次。
1.3 步态sEMG模式识别
1.3.1 预处理和活动段提取
为了减小肌电采集中各类噪声的影响,本研究对采集到的肌电信号进行滤波预处理。通常认为肌电信号是非平稳随机信号,这主要是由于运动单元发放率的随机性,低频段肌电信号非常不稳定,需首先用30 Hz的高通FIR滤波器对信号进行滤波[11-12]。然后对信号进行50 Hz陷波,除去工频干扰。
区分人体肌肉是否活动是步态识别的前提,活动段检测是多通道表面肌电信号模式识别过程中重要的一环,其目的是在连续采集的多通道肌电信号数据流中提取出对应于动作执行时的幅度信号,称为活动段[13]。活动段信号是步态动作在sEMG上幅度相关信息的反映,作为动作分类与识别的基本单元。为了自动确定步态开始和结束的时间,本研究采用了开关阈值的方法,并结合样本熵SE(sample entropy)进行活动段检测[14-15]。
假设时间序列为x(i),i=1~N,预先给定相似容限r和模式维数m,从而可以得到N+m-1个时间子序列,U(i)=[x(i),x(i+1),…,x(i+m-1)](1≤i≤N+m-1)。
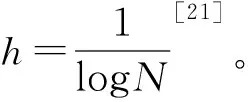
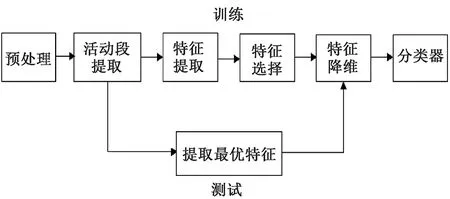
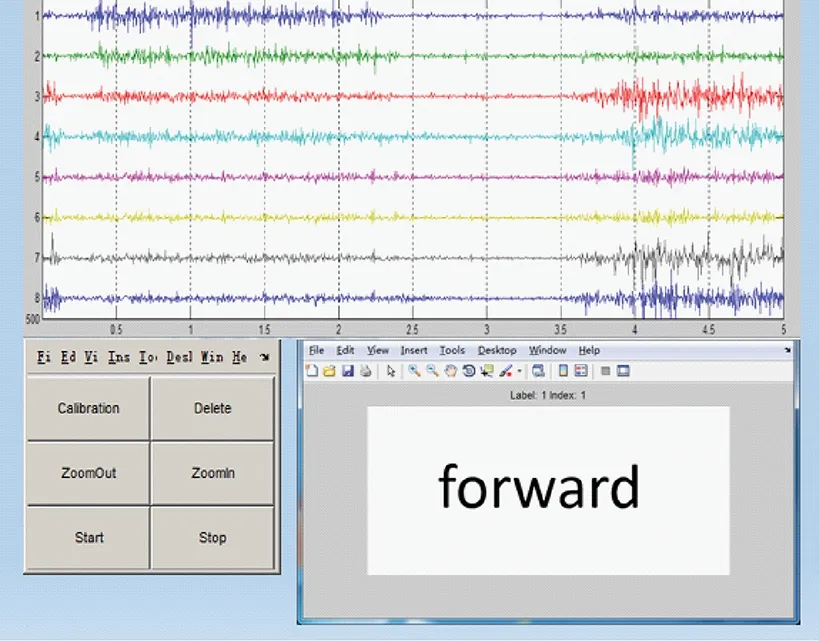
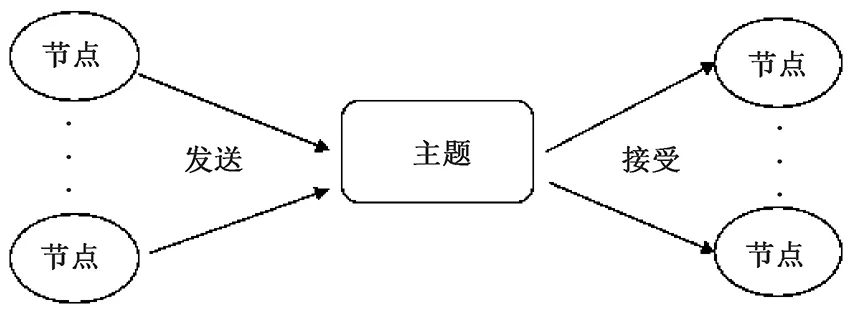
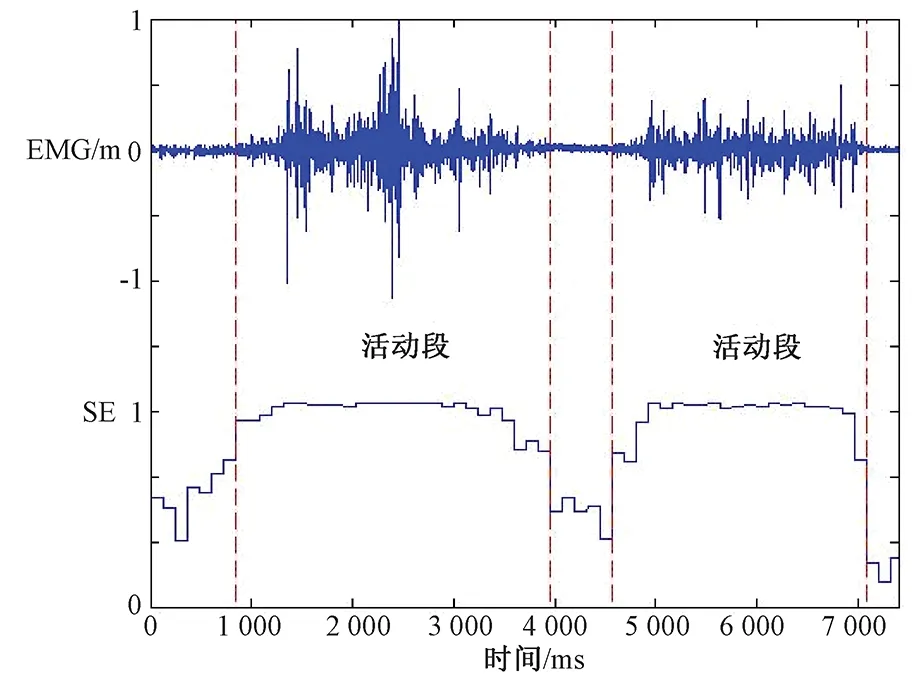
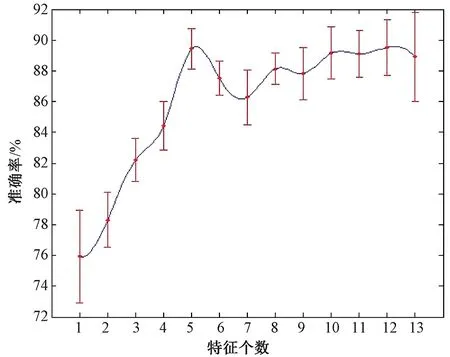
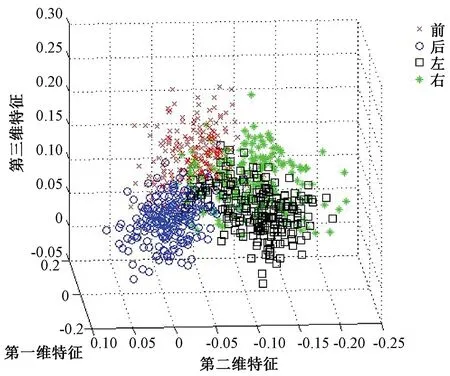
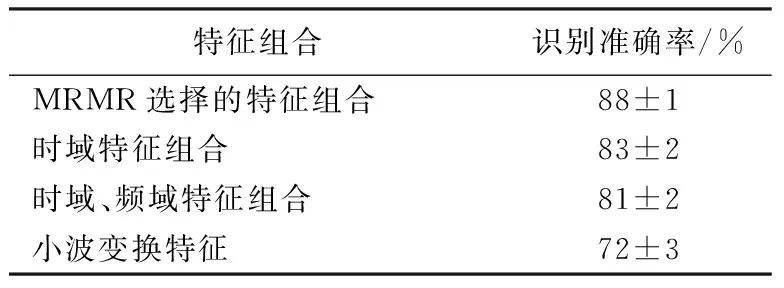
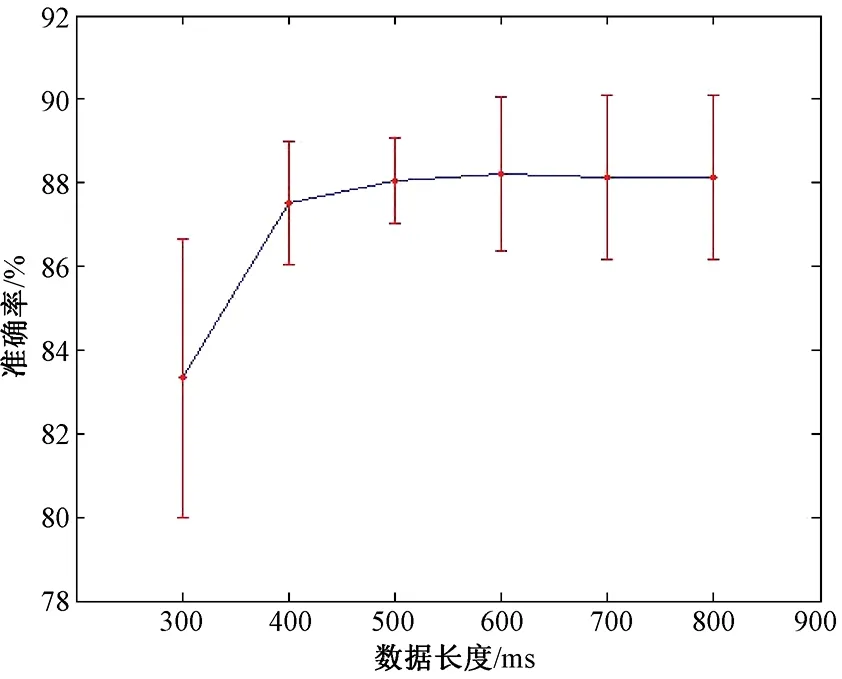
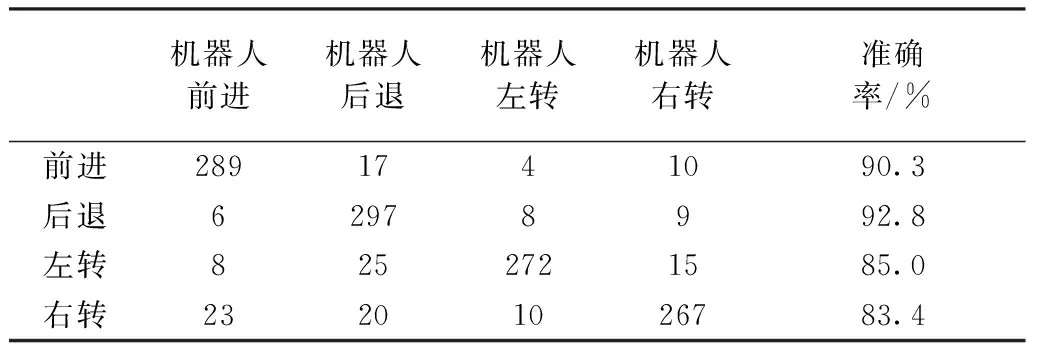
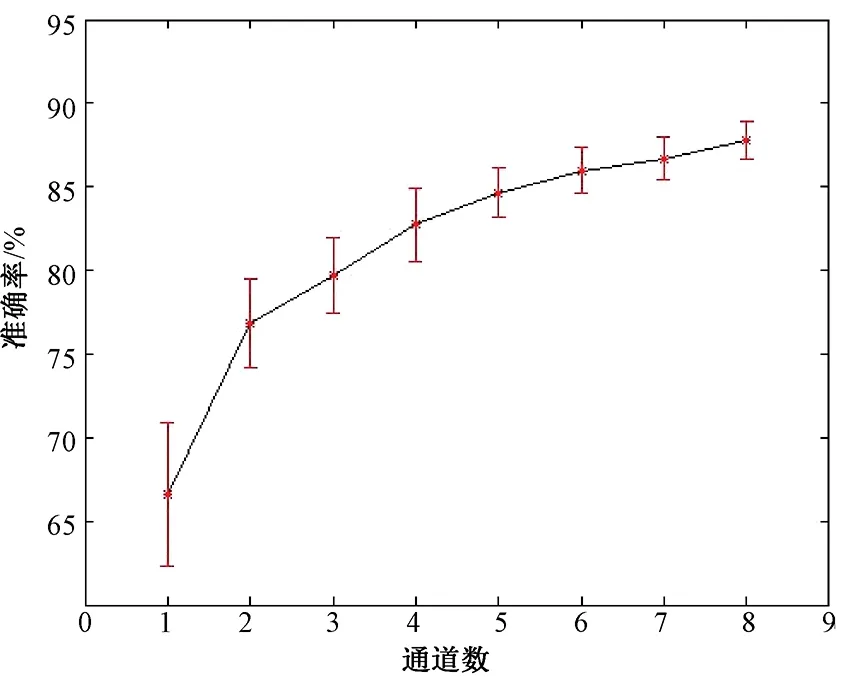
对于每个子序列,可以得到其他子序列与其距离小于r的个数,k(i)=number(d[U(i),U(j)] (1) A是维数为m+1时间序列自相似的概率,则样本熵定义为 SE=-ln(A/B) (2) 样本熵是由Richman等研究的,是通过近似熵改进而发展的一种信号复杂性测度方法。信号序列越复杂,其样本熵值越大[14]。算法选取1s的平静状态肌电信号,并计算一秒内肌电信号的样本熵SE。步态运动开始阈值设为SE×5,步态运动的结束阈值设为SE×3。在本研究中,对滤波后的信号进行实时的非重叠滑动窗处理,每个窗的时间长度为60ms,然后计算每个窗内信号的样本熵。当连续4个窗的平均样本熵大于开始阈值时,则4个窗中的第一个窗的起点为一次步态的开始时间。当连续3个窗的平均样本熵小于结束阈值,取3个窗中第一个窗的起点作为步态的结束时间。因为一次步态所需要的持续时间大约为200ms,因此如果检测到的步态持续时间小于200ms,则认为该次是误触发。 由于表面肌电信号是非平稳信号,因此在活动段检测后,对信号进行滑动窗处理,其中窗长为200ms,步长为40ms[16-18]。 1.3.2 肌电特征选择 在以往的步态研究中,大多数同时采集双腿的大小腿多组肌肉群信号,且采用常见的几种特征组合,包括AR系数和平均绝对值[11],时域平均绝对值、均方根和过零点数[19]等其他组合。在本研究中,只采集了单条小腿的肌电信号,直接利用前人研究的参数和方法,效果不佳。 借鉴前人方法和本系统肌电信号的特点,本研究采用的肌电特征包括平均绝对值、波长、过零率、均方根、威尔逊幅值、方差、AR系数[19]和小波变换系数[20]。 对于长度为N的信号x(1),x(2),…,x(N),平均绝对值定义为 (3) 波长定义为 (4) 过零率定义为 (5) 均方根定义为 (6) 对于给定阈值ε,威尔逊幅值定义为 (7) 其中 (8) 方差定义为 (9) 一段信号可以用式(9)来表示,其中ak为AR系数,有 (10) 小波变换系数的定义为WT,其中Ψ为小波基函数,在本文中用到的小波基函数为‘sym5’小波,有 (11) 在特征选择中,不仅要考虑特征与类别的相关度,也要考虑各特征之间的联系,互信息是比较合适的指标。对于给定的x、y这两个随机变量,两者间的互信息为 (12) 式中,p(x,y)为x和y的联合概率密度,p(x)、p(y)分别为x、y的概率密度。 对于n维特征的数据,MRMR算法的具体过程如下:首先,分别计算各特征和类别间的互信息Di(i=1,…,n),将互信息最大的特征k作为初始特征;然后,分别计算剩余特征和初始特征之间的互信息,作为冗余度Ri,从而得到剩余特征的最大相关最小冗余度Di-Ri,将Di-Ri最大的特征作为第二个特征;重复前面的过程,得到基于MRMR的特征排序;最后采用基于序列前向选择算法,以交叉验证的准确率作为标准,找出合适的特征组合。 1.3.3 特征降维和分类器训练 分类器采用支持向量机(support vector machine, SVM),其中核选择为RBF核,c、g为默认参数。支持向量机是一种经典的模式分类算法,在基于表面肌电的手势识别中有较好的性能[22]。 对于8通道的肌电信号,每帧有8n个特征。如果将8n维特征全部输入分类器,会造成过拟合现象,因此在训练之前需要对这8n维的特征进行降维。本研究选用线性判别分析(linear discriminant analysis, LDA),将数据降维到三维。相比常见的PCA方法,LDA可以找到线性可分性最大的子空间。 在测试时,取其前1 s的数据进行分析,1 s的数据共包含21个窗,对于每个窗都可以得到一个识别结果。在识别某一试次信号时,以21个窗识别的结果进行投票,得票最高的即为该试次对应的步态。 1.3.4 MRMR算法步骤 综上所述,整个算法的处理流程如图4所示。先对原始数据进行预处理,然后进行活动段提取和滑动窗处理。训练时,提取每个滑动窗所有特征,并通过MRMR算法确定最佳的特征组合,接着通过LDA将特征降到三维,并放入SVM训练得到分类器;测试时,提取每个滑动窗的最佳特征组合,然后通过LDA将特征降到三维,并放入SVM得到识别结果。 图4 算法流程Fig.4 Algorithmic flowchart 对于n维特征的数据,MRMR算法的具体过程如下。 步骤1:分别计算各特征和类别间的互信息Di(i=1,…,n),将互信息最大的特征k作为初始特征。 步骤2:分别计算剩余特征和初始特征之间的互信息,作为冗余度Ri,从而得到剩余特征的最大相关最小冗余度Di-Ri,将Di-Ri最大的特征作为第二个特征。 步骤3:重复步骤1和步骤2,得到基于MRMR的特征排序。 步骤4:基于序列前向选择算法,以交叉验证的准确率作为标准,找出合适的特征组合。 1.4 人机交互界面和智能机器人 人机交互界面是在Matlab平台下实现的,如图5所示。 人机互界面实现了3个功能:一是采集和存储原始肌电信号;二是建立各类步态动作sEMG特征模板,对分类器的参数进行训练;三是实时显示肌电数据和识别结果;四是实时识别出当前的步态动作,并且通过TCP/IP协议控制智能机器人的运动。 图5 人机交互界面Fig.5 GUI 所用的智能机器人是TurtleBot,是一款基于ROS的小型移动机器人,如图6所示。整个基于ROS搭建的智能机器人系统包括3个关键部分:节点、消息和主题[23]。这三者的关系如图7所示,其中节点就是一些执行运算任务的进程。ROS利用规模可增长的方式是代码模块化,即一个系统由很多节点组成[23]。这样,节点就可以理解为ROS系统中运行的一个单元,节点与节点相连就构成了整个系统结构。节点与节点直接通过消息进行连接,每一个消息都是一个严格的数据结构。一个节点可以在一个给定的主题中发布消息。在该主题中,部分节点可以发送消息,而部分节点可以接受消息。在建立了基于ROS的智能机器人运动系统后,可以通过TCP/IP协议与模式识别模块进行连接。 图6 TurtleBot机器人Fig.6 TurtleBot 图7 ROS中基于主题的通信模式Fig.7 Topic based communication mode in ROS 2.1 活动段提取性能 为了验证提出的步态活动段检测算法的有效性,以一段包含2个步态动作的信号为例,分析该方法的实际应用效果。让一个受试者依次执行实验中定义的2个步态动作,采集到的8通道叠加平均后的sEMG信号及活动段检测的结果,如图8所示。图中上部信号为8通道叠加平均得到的sEMG信号,底部信号为各个移动窗的样本熵值,移动窗宽60 ms。从图中可以看出,在步态动作执行区间出现稳定的信号峰,通过合适的阈值检测就可以确定信号峰的端点,即每一个步态动作的起点和终点。图中虚线区域内为2个步态动作执行的区间,同时用虚线标记出每一个步态动作执行时的起止时刻,由此确定用户每执行一个步态动作所对应的活动段信号。从图中可以看出,本研究所提出的活动段检测方法可以准确地标记步态动作的起止时间,因为在对应的步态动作执行时间内信号的样本熵值明显较高。 图8 活动段检测Fig.8 Active segments detection 2.2 MRMR算法性能分析 利用Hanchuan Peng编写的MRMR工具包,得到相应的特征排序。然后,采用序列前向选择算法,以交叉验证的准确率作为标准,找出合适的特征组合。图9所示为特征个数和识别准确率的关系。可以看出,得到的前5个特征已经能达到很好的识别效果,继续增加特征个数对结果影响不大,而且特征个数越多则防止过拟合需要的样本量越大。综合考虑,选择了MRMR得到的特征序列的前5个作为本研究的特征组合。 图9 特征数和分类准确率的关系Fig.9 The relationship between feature number and accuracy 最终得到的特征组合为波长、均方根、‘sym5’小波3层分解得到的第3层系数能量,以及4阶AR模型的第2和第3个系数。图10所示为所选特征通过LDA降维到三维后得到的空间分布,从中也可以看到所选特征的可分性很好。 图10 特征空间分布Fig.10 Distribution of features domain 为了分析所采用的最大相关最小冗余特征选择算法的性能,对比了通过MRMR算法得到的特征组合和前人文献中提到的几种特征组合的分类正确率。常用到的特征组合包括时域特征组合(平均绝对值MAV,过零率ZC,符号改变斜率SSC,波长WL)、时域和频域特征组合(平均绝对值MAV,4阶AR模型系数)、小波变换系数(‘sym5’小波3级分解得到的系数能量),得到的结果如表2所示。 表2 不同特征识别效果比较Tab.2 The comparison of recognition performance using different features 2.3 实时交互控制 在实时控制系统中,系统的响应时间或延迟时间是很关键的一个指标。在本研究中,由于算法的运行速度和识别结果通过TCP/IP发送给机器人的时间较小可以忽略,所以整个方法的控制延迟主要取决于每次识别需要利用的数据时间长度。图11显示了数据长度与识别效果的关系,可见随着数据长度的增加,识别准确率也逐渐提高,最后趋于平缓。当每次识别利用的数据长度为300 ms时,由于提供的识别信息太少导致一定程度的分类困难,全局平均动作识别率仅有83%;当每次识别利用的数据长度增加到400 ms时,全局平均动作识别率达到88%,之后增幅也比较平缓。综合考虑系统的延迟时间和识别效果,每次识别利用的数据长度为400 ms。 图11 数据长度和识别准确率的关系Fig.11 The relationship between data length and accuracy 在实时交互控制中,8位受试分别执行前进、后退、左转、右转4种步态各320次,结果如表3所示。前进、后退2种步态的分类识别率较高,分别为90%和93%;左转、右转2种步态的分类识别率较低,分别为85%和83%。 表3 交互控制结果Tab.3 The result of Human-machine interaction 在前面的分析中,利用了8个通道的数据,并取得了较好的结果。最后,进一步分析了通道数和识别准确率的关系。从图12中可以看到:随着利用的通道数越多,系统的识别准确率越高;当利用的通道数达到5个以后,识别准确率增长趋于平缓。所以,为了节省成本以及实验更加方便,可以只采集5个通道的数据,分别为第1、2、6、7和8通道。 图12 通道数和识别准确率的关系Fig.12 The relationship between channel number and accuracy 在本文中,提出了一种基于表面肌电的步态识别技术,为人机交互提供了新的思路。当前阶段,大部分的基于表面肌电的步态识别方法需要同时采集大腿及小腿的肌电信号,但在很多情况中受实际条件制约,大腿肌电信号难于同步采集,因而制约了步态识别技术的发展和应用。因此,本研究设计了一种基于小腿肌电信号的步态识别方法。通过采用所提出的MRMR算法得到的特征组合,只需要使用小腿表面肌电信号进行步态分类,即可得到良好的分类效果。 本研究对比了常用的一些肌电特征组合和新的特征组合的分类效果。在常用的特征组合中,小波变换提取的特征组合分类效果最差(72%),时频域特征组合分类效果较好(81%),时域特征组合分类效果最好(83%)。通过MRMR提取多种信号特征组合,包括不同导联数据中波长、均方根、‘sym5’小波系数能量、AR模型系数等,使新的特征组合识别准确率显著提高到88%。该组合既包含了传统的空域特征、时域特征,同时又进一步优化筛选了数据的频域特征,因此能够反映信号的空、时、频信息及信号的变化趋势。新特征组合之间的冗余度小、类别相关度大,因此产生了较好的分类效果。 基于表面肌电的步态识别技术是一种信号检测技术,检测质量通常与采样时间长度及信噪比密切相关。在实时交互中,实时采集数据越长,其包含的信息也越丰富,识别效果也越好,但也会使系统的响应时间越长。在正常情况下,完成一个行走步态需要大概300 ms,如果系统识别截取的数据长度为300 ms,则识别准确率较低(83.4%)。随着数据长度的增加,识别准确率逐渐增加,到400 ms左右开始趋于平缓,因此选择400 ms作为标准检测时长。由于存在背景噪声,多个电极往往能够比单个电极获得更高的信噪比。本研究采用了8导电极,这些电极位置比较密集,各通道之间的肌电信号存在信息冗余。研究发现,只采集第1、2、6、7、8通道的信号,识别准确率即可达85%,结果稍低于8通道信号的识别准确率(88%)。如果在实际应用中考虑成本问题,只采集这5个通道的数据也能得到较良好的分类效果。 8名受试者参与了智能机器人实时控制实验,其中包括1名体育特长受试者、2名经常参加健身的受试者、4名不经常参与体育锻炼但体重正常的受试者,以及1名体态偏胖的受试者。实验显示,体育特长受试者和经常健身的受试者的识别效果较好,体态偏胖的受试者的识别结果相对较差。据推测,经常运动的人群小腿肌肉发达,因此其小腿肌电信号较干净,信噪比较高;而体态偏胖的人小腿脂肪较多,肌电信号难于传导到皮层表面,因此采集到的肌电信号质量较差,信噪比较低。对比4种步态识别的结果,前进和后退步态的识别准确率达到90%以上,而左转和右转步态的识别准确率相对较低。在生物动力学研究中,转向动作主要由大腿肌肉群负责实施,小腿肌肉群仅起辅助作用。在本研究中,只使用小腿的肌电信号作为输入数据,因此相比直行步态,转向步态的识别准确率略有降低。 虽然本研究已经设计出一套有效的基于小腿表面肌电的人机交互方法,但该领域依然存在很多有待解决的问题。受试每天的肌电信号特征都有较大差异,实际应用中的训练数据只能在较短的时间内保持有效性,每隔一段时间都需要重新采集训练数据。肌电信号信噪比与受试者的疲劳程度密切相关,在不同疲劳状态下肌电特征也会发生偏移,从而对长时间的人机交互产生不良影响。因此,如何进行跨天学习以及如何消除疲劳状态的影响,是下一步的研究方向。 课题研究了一种基于表面肌电的智能机器人协同控制方法,并用于实现TurtleBot的前进、后退、左转、右转运动。在研究中,提取受试者行走时的肌电信号特征,采用MRMR算法提取出和类别相关度最大而彼此间冗余度最小的特征组合。基于这个特征组合,建立了一套在线的人机交互系统。先对步态动作sEMG信号采集和模式识别,然后将识别结果作为智能机器人运动的控制信息,从而实现了人与智能机器人的实时交互。通过实验发现,构建的这套协同控制方法具有控制实时性强和控制准确度高等特点,较好地展现出基于sEMG信号的步态识别技术在人机交互领域的应用前景。 [1] Hatanaka T, Chopra N, Spong MW. Passivity-based control of robots: Historical perspective and contemporary issues[C]//2015 IEEE 54th Annual Conference on Decision and Control (CDC). Osaca: IEEE, 2015: 2450-2452. [2] Pham H, Kawanishi M, Narikiyo T. A LLE-HMM-based framework for recognizing human gait movement from EMG [C]// 2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle: IEEE, 2015: 2997-3002. [3] Zhang TY. The research on motion recognition based on EMG of residual thigh [C]//Bioinformatics and Biomedical Engineering: New Advances: Proceedings of the 9th International Conference on Bioinformatics and Biomedical Engineering (iCBBE 2015), Shanghai: CRC Press, 2015: 445. [4] Hargrove LJ, Simon AM, Young AJ, et al. Robotic leg control with EMG decoding in an amputee with nerve transfers [J]. New England Journal of Medicine, 2013, 369(13): 1237-1242. [5] Fa-rong G, Jia-jia W, Xu-gang X, et al. Gait recognition for lower extremity electromyographic signals based on PSO-SVM method [J]. Journal of Electronics & Information Technology, 2015, 5: 022. [6] Peng H, Long F, Ding C. Feature selection based on mutual information criteria of max-dependency, max-relevance, and min-redundancy [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(8): 1226-1238. [7] Linder T, Arras KO. People detection, tracking and visualization using ROS on a mobile service robot [M]//Robot Operating System (ROS). Beilin: Springer International Publishing, 2016: 187-213. [8] Quigley M, Conley K, Gerkey B, et al. ROS: an open-source Robot Operating System [C]//ICRA Workshop on Open Source Software. Kobe:IEEE, 2009, 3(3.2): 5. [9] Huang H, Kuiken TA, Lipschutz RD. A strategy for identifying locomotion modes using surface electromyography [J]. IEEE Transactions on Biomedical Engineering, 2009, 56(1): 65-73. [10] Rainoldi A, Melchiorri G, Caruso I. A method for positioning electrodes during surface EMG recordings in lower limb muscles [J]. Journal of Neuroscience Methods, 2004, 134(1): 37-43. [11] 张旭. 基于表面肌电信号的人体动作识别与交互 [D]. 合肥:中国科学技术大学, 2010. [12] 陈玲玲. 基于支持向量机的下肢肌电信号模式识别的研究 [D]. 天津: 河北工业大学, 2006. [13] Haroon N, Malik AN. Multiple hand gesture recognition using surface EMG signals [J]. Journal of Biomedical Engineering and Medical Imaging, 2016, 3(1): 1-8. [14] Chen X, Zhang X, Zhao Z Y, et al. Multiple hand gesture recognition based on surface EMG signal [C]// The 1st International Conference on Bioinformatics and Biomedical Engineering. Wuhan: IEEE, 2007: 506-509. [15] Kosmidou VE, Hadjileontiadis LJ. Sign language recognition using intrinsic-mode sample entropy on sEMG and accelerometer data [J]. IEEE Transactions on Biomedical Engineering, 2009, 56(12): 2879-2890. [16] 成娟. 基于表面肌电和加速度信号融合的动作识别和人体行为分析研究 [D]. 合肥:中国科学技术大学, 2013. [17] 佟丽娜, 侯增广, 彭亮,等. 基于多路sEMG时序分析的人体运动模式识别方法 [J]. 自动化学报, 2014, 40(5): 810-821. [18] Wang N, Chen Y, Zhang X. Realtime recognition of multi-finger prehensile gestures [J]. Biomedical Signal Processing and Control, 2014, 13: 262-269. [19] 刘欣. 基于模式识别的肌电信号动作分类性能研究 [D]. 济南:山东大学, 2010. [20] 王红旗, 李林伟, 毛啊敏. 基于小波包的表面肌电信号特征表示与识别 [J]. 计算机工程与应用, 2015, 51(9):217-220. [21] Kwak N, Choi CH. Input feature selection by mutual information based on Parzenwindow [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(12): 1667-1671. [22] Chen L, Yang P, Xu X, et al. Fuzzy support vector machine for EMG pattern recognition and myoelectrical prosthesis control [M]//Advances in Neural Networks-ISNN 2007. Beilin:Springer Berlin Heidelberg, 2007: 1291-1298. [23] 刘品杰. ROS机器人程序设计 [M]. 北京: 机械工业出版社, 2014. Cooperative Intelligent Robot Control Method Using Leg Surface EMG Signals Xu Chaoli Lin Ke Yang Chen Wu Chaohua Gao Xiaorong#* (DepartmentofBiomedicalEngineering,TsinghuaUniversity,Beijing100084,China) As a significant aspect of human-computer interaction, gait recognition technology has a broad prospect in robot control area. A method for intelligent robot cooperative control system was proposed by using single leg surface EMG-based gait recognition technology. The system achieved the classification and recognition among four different gaits (moving forward, moving backward, turning left and turning right) by using mutual information based minimal-redundancy-maximal-relevance (MRMR) algorithm, and built up a synchronous robot control system. Surface EMG (sEMG) signals were collected from 8 subjects to classify and recognize the gait, and then the recognition result was used to control the robot synchronous motion. The results of the experiment showed that the recognition accuracy of the system reached to 88%. Based on the proposed approach, a robot synchronous control system with good synchronous controlling performance and high controlling accuracy was built. In concusion, the leg EMG signal based robot cooperative control technology has the application potentials in the areas of civilian equipment control and human-computer interaction in the future. leg surface electromyographic (sEMG); gait recognition; minimal redundancy maximal relevance (MRMR) algorithm; intelligent robot 10.3969/j.issn.0258-8021. 2016. 04.001 2016-04-11, 录用日期:2016-06-03 国家自然科学基金重点项目(61431007,91320202); 装备预先研究项目(513260503) R318 A 0258-8021(2016) 04-0385-09 # 中国生物医学工程学会高级会员(Senior member, Chinese Society of Biomedical Engineering) *通信作者(Corresponding author), E-mail:gxr-dea@tsinghua.edu.cn






2 结果
3 讨论
4 结论
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
中国典型病例大全(2022年7期)2022-04-22
中国药学药品知识仓库(2022年1期)2022-03-23
成都信息工程大学学报(2021年4期)2021-11-22
科技传播(2019年24期)2019-06-15
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
中国美容医学(2018年12期)2018-02-27
中国学术期刊文摘(2018年23期)2018-02-08
北京航空航天大学学报(2017年9期)2017-12-18
