面向空间遥操作的非对称双人共享控制及其性能分析
2016-02-24 07:00:34鹿振宇黄攀峰戴沛
航空学报 2016年2期
鹿振宇, 黄攀峰,*, 戴沛
1.西北工业大学 航天学院 智能机器人研究中心, 西安 710072 2.西北工业大学 航天飞行动力学技术重点实验室, 西安 710072
面向空间遥操作的非对称双人共享控制及其性能分析
鹿振宇1,2, 黄攀峰1,2,*, 戴沛1,2
1.西北工业大学 航天学院 智能机器人研究中心, 西安 710072 2.西北工业大学 航天飞行动力学技术重点实验室, 西安 710072
面向复杂操控任务的多人/机遥操作技术是未来空间遥操作的发展趋势之一。在综述目前双主单从的遥操作控制模式的基础上,提出一种面向空间遥操作的非对称双人共享控制方法。首先,通过分析理想双主单从遥操作系统模型,并对优势因子进行区分,建立了时延影响下的非对称双主单从共享控制系统模型;然后,利用传递阻抗、可达阻抗范围、性能表现距离和传递阻抗比等函数对系统的性能指标进行评价分析,并给出优势因子、控制阻抗和环境阻抗等参数对系统运动学性能的影响;最后,对所提出的方法进行仿真和实验验证,结果表明相比于传统控制方法,非对称双人共享控制具有较好的透明性和抗时延影响特性。
遥操作; 非对称双人共享控制; 优势因子; 性能分析; 透明性
近年来,以“凤凰计划”和ISS加拿大机械臂任务为代表的包含复杂操控的空间装配、维护作业任务的空间在轨服务技术引起了各国的重视。在这些任务中,由于机器人智能程度不高,对于部分精细操作仍是采用遥操作的方式进行。目前,虽然遥操作技术已经被广泛地应用于航天器在轨服务、外星探测[1-2]、远程医疗[3]以及特殊环境的非接触操作中,一些单主单从(SMSS)遥操作控制方法在文献[4-5]中也有所总结,但是针对一些需要复杂并行操作的任务而言,这显然是不够的。
相比于传统的单主单从遥操作方式,多主多从(MMMS)遥操作技术旨在研究多个操作者对多个相互通信的机器人的操作,从而高效地完成较复杂的操作任务,在执行相同的任务时,其操作方式更为灵活,任务负载也更大[6-7]。
双人共享控制作为一种双主单从的遥操作控制方法,在远程医疗的外科手术训练与教学中首先得到研究[8],目前部分研究成果已在空间操控和远程医疗中得到验证[9-10]。这种共享控制方法不同于柔性共享控制[11-12],其基本思想来源于机械原理中的H型构件[8]。在H型构件中,α∈[0,1]表示节点在连接轴上的位置;而在双人共享遥操作控制中,α和1-α则表示系统中两个主控器(其中一个表示训练者,另一个表示被训练者)的控制权重,从手的位置和控制作用力由两个主手共同决定。此外,文献[8]还通过H∞的方法实现了训练者和被训练者对从手的单边协同控制,但是并没有将从手的动力学反馈信息用于主手的控制器设计中。
Khademian和Hashtrudi-Zaad[13]提出一种包含从手反馈信息的共享控制方法,与文献[8]中的控制权重概念类似,通过引入优势因子实现主手和从手之间力和速度信息的共享,由此形成了双主单从的共享控制基本结构,如图1所示。图中:Fh1和Fh2为操作者1和操作者2对主机械臂1和主机械臂2的作用力;Vh1和Vh2为操作者1和操作者2的速度;Fe为从手对环境的作用力;Ve为从手在环境中的运动速度。此外,文献[13]还通过定义传递阻抗函数和可达阻抗范围函数分析了各参数对系统运动学特性的影响。
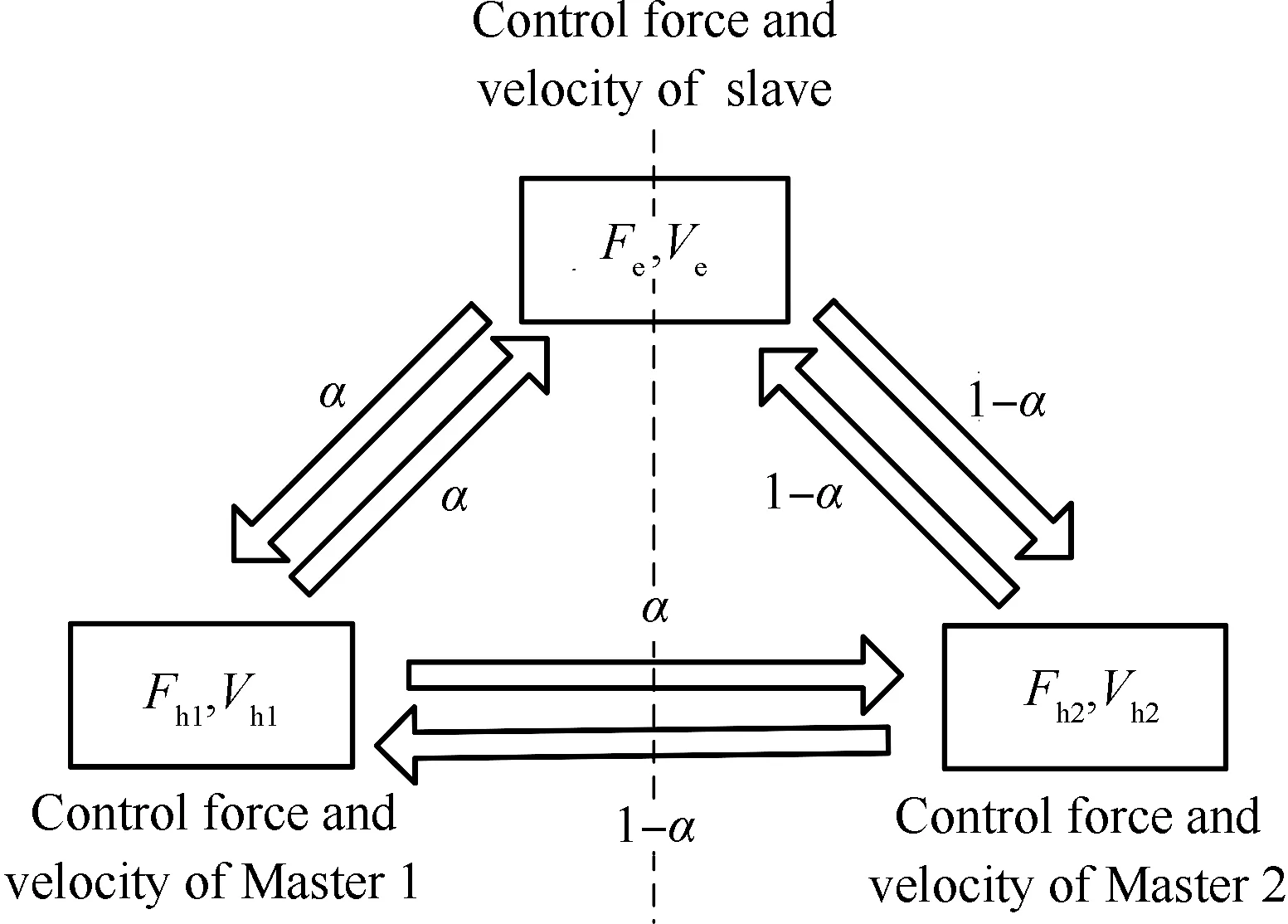
图1 双主单从的共享控制基本结构
Fig.1 Basic structure of dual-user single-slave shared control
在此基础上,Khademian和Hashtrudi-Zaad还研究了四通道结构下主从手作用力和位置共享控制情况的系统运动学特性[14],并通过改进系统的控制结构增加系统的可操作性和操作者对环境的感知能力[15]。在控制方面,Khademian和Hashtrudi-Zaad的主要贡献在于提出了共享控制结构下的绝对稳定条件[16],并研究了多边共享控制的主手动力学不确定参数问题的鲁棒控制方法[17]。此外,Razi[18]和Li[19]等也分别通过将共享控制形式化为三端口网络,利用ZW稳定性标准和Llewellyn准则,给出了共享多边控制的系统稳定性条件。
通信时延是影响遥操作系统稳定的重要因素之一,针对双人共享系统,Shahbazi等利用无源理论、鲁棒控制、自适应阻抗控制和滑模控制给出了固定时延情况[20]、时延未知[21-22]以及未知固定通信时延和不确定干扰信息的情况[23]下双人遥操作系统的控制方法。
不难发现,无论是选取控制权重还是优势因子,共享控制系统的共享程度都是由一个参数α决定,尤其是在双主单从的三边共享控制中(如图1 所示),主从手的控制结构是对称的。本文提出一种包含通信时延的非对称的控制结构,即各主从操作端的优势因子不同,从而增加主从手的操作灵活性,并以此分析不同参数的选择对系统运动学特性的影响。
1 非对称共享控制模型
主从机器人的一般动力学模型可以描述为
(1)

操作者和环境的动力学通常在任务空间进行描述,本文的操作者和环境采用线性时不变(LTI)模型,即
(2)
式中:Zm1=Mm1s,Zm2=Mm2s和Zs=Mss,Mm1、Mm2和Ms分别为主从手阻抗的质量模型参数,s为拉普拉斯算子;Fcm1、Fcm2和Fcs为主从手的控制力,采用基于位置反馈信息的双通道模型表示为
(3)
式中:Cm1=Bm1+Km1/s、Cm2=Bm2+Km2/s和Cs=Bs+Ks/s,Bi和Ki(i=m1,m2,s)均为主从手PD控制器中的阻尼和刚度系数;Zcm1=Zm1+Cm1,Zcm2=Zm2+Cm2和Zcs=Zs+Cs为PD控制下的主从动力学阻抗;Vh1d、Vh2d和Ved分别为主手和从手的期望速度,假设主手间间距相比于主从手间距可以忽略且两主手与从手间通信时延相同,则有
(4)
式中:α1、α2和α3分别为非对称共享控制中的优势因子;T为主从手之间的通讯时延。若式(4)中的优势因子取为α1=α2=α3=α,则非对称共享控制与传统共享控制的表达式相同,所以传统共享控制是非对称共享控制的一个特例。参照文献[13-14]中的共享控制系统结构模型,多边非对称共享控制系统结构如图2所示。
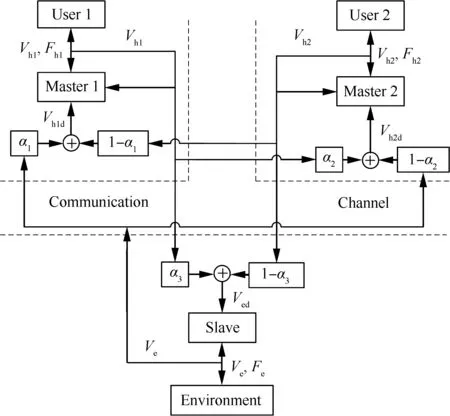
图2 非对称共享控制系统结构
Fig.2 System structure of asymmetric shared control
将双人系统表示成一种三端口网络的形式,其具体形式为[24]
Y=HU
(5)
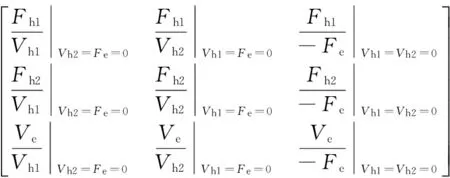
式中:H为混合矩阵,其具体表达式为
H=

U=GY
(6)
理想情况下,主手可以完全感受到从手的作用力,从手的运动由主手的共同作用得到,即满足
则此时混合矩阵的理想值Hideal为
此外,在双人操作训练过程中,还希望被训练者(通常为主手2)能跟随训练者(主手1)的运动变化,从手作用力也由两主手共同决定[14],即满足
则G的理想值Gideal为
在共享控制中,若令α=1,那么式(4)可以化为Vh1d=Vee-sT和Ved=Vh1e-sT,此时共享控制变为主手1和从手之间的双通道双边控制系统;同时由于Vh2d=Vh1,则此时主手2完全被主手1控制,从而无法直接接收从手信息。同样,当α=0时,可以实现主手2与从手的双边控制,且主手1也完全由主手2所控制。
根据式(4)可知,通过设定统一的优势因子α即传统双人共享控制,不可能同时满足Hideal和Gideal的要求。而在非对称共享控制中,当α1和α2满足α1=1,α2=0时,即可得到Hideal和Gideal的值,α3可以看作共享控制权重(也为优势因子),表示主手对从手操作的不同影响程度,从而获取更为理想的控制效果。
2 运动学性能分析
2.1 性能分析标准
文献[13]通过构建透明性转换阻抗及相关函数来分析系统性能。参照该文,定义非对称共享控制的传递阻抗为
(7)
将式(1)~式(4)代入式(7)可得
Zto1=Zcm1-
式中:
(1-α3)(1-α2)ZcsZcm2e-2sT
根据主手1和主手2的对称性,函数Zto2可以通过将Zto1中的参数及阻抗α1、1-α1、α3、Zh1、Zcm1和Zcm2替换为1-α2、α2、1-α3、Zh2、Zcm2和Zcm1得到,故本文将主要讨论对主手1的影响。
在传递阻抗函数的基础上分别定义以下4个函数,以分析优势因子和阻抗值的变化对系统操作透明性和运动跟随性的影响。
定义1 透明性转换函数Gt
式中:Zto为传递阻抗。Gt指标用于分析系统的透明性,理想情况下,Gt的幅频值和相频值分别为1和0。
定义2 可实现阻抗范围Zto1width
Zto1min=Zto1|Ze=0
Zto1max=Zto1|Ze→∞
Zto1width=Zto1max-Zto1min
函数Zto1width表示Zto1在Ze发生变化时的变化范围,理想情况下,Zto1min=0,Zto1width→∞。
定义3 性能测度函数Disp(α1,α2)
Disp(α1,α2)=Zto1(1,0)-Zto1(α1,α2)
式中:Zto1(α1,α2)为α1和α2变化时的Zto1值;Zto1(1,0)为理想情况(α1=1,α2=0)下的Zto1值。Disp(α1,α2)用于分析优势因子α1和α2的变化(α3取任意值)对于透明性的影响,
定义4 传递阻抗比函数Ht
函数Ht用来分析操作过程中的参数变化对两主手间运动跟随性(即耦合效果)的影响。
2.2 非对称共享控制性能分析
2.2.1 透明性转换函数
考虑α3表示共享控制中的优势因子,为了分析各参数对Gt的影响,在考虑时延对仿真结果的影响时,取T=1.5s,其他系统参数如表1所示,其中,M、B和K分别为阻抗的质量、阻尼和刚度系数。

表1 数值分析参数
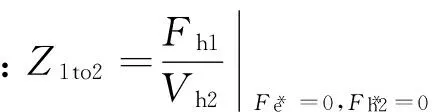
首先固定α3=0.5,讨论中等接触环境、宽松控制情况下,不同α1和α2的变化对Gt幅频变化的影响,结果如图3和图4所示。
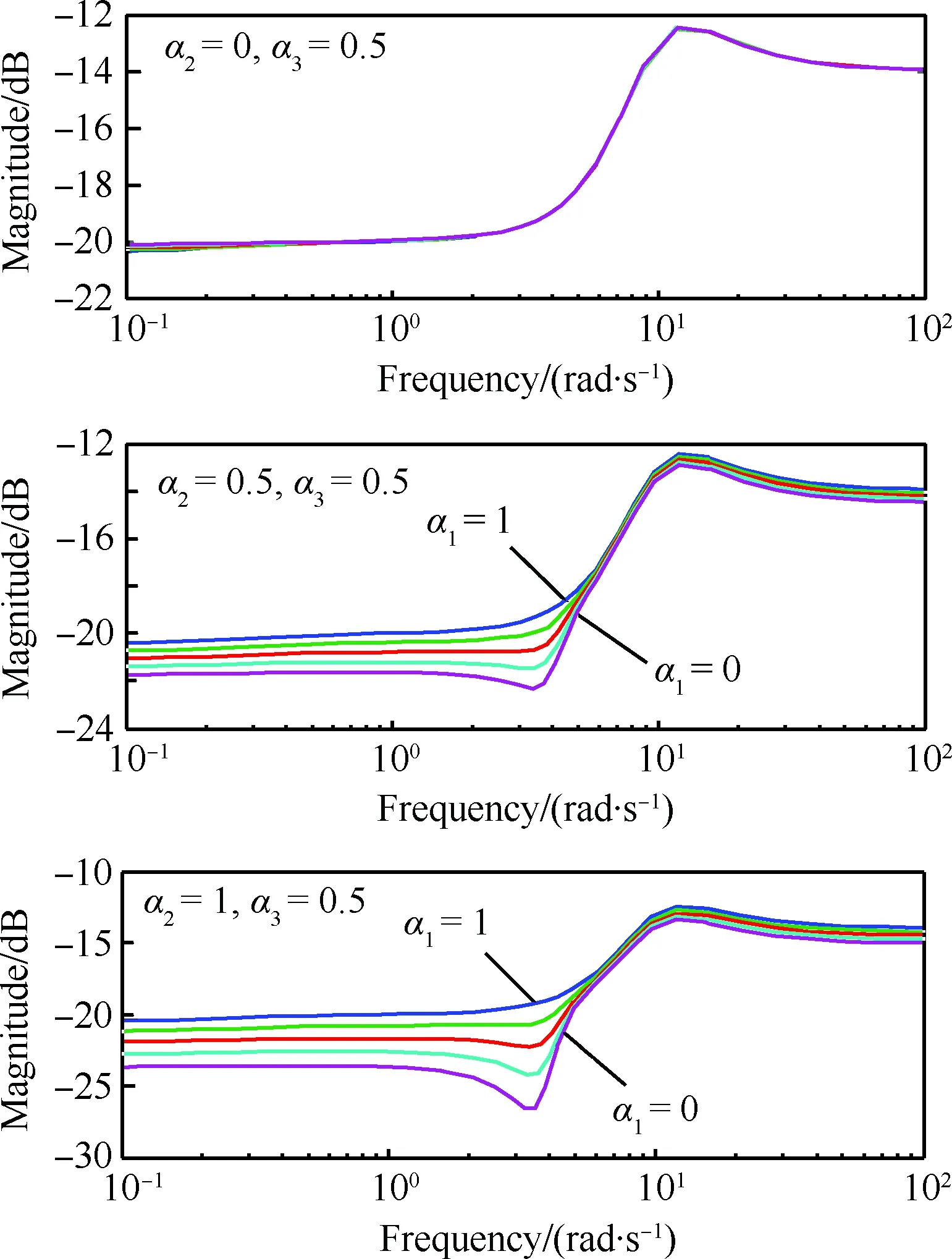
图3 不同α2且α1等差变化下Gt的幅频变化
Fig.3 Amplitude-frequency variations of Gtwith constant α2and equidifferent α1
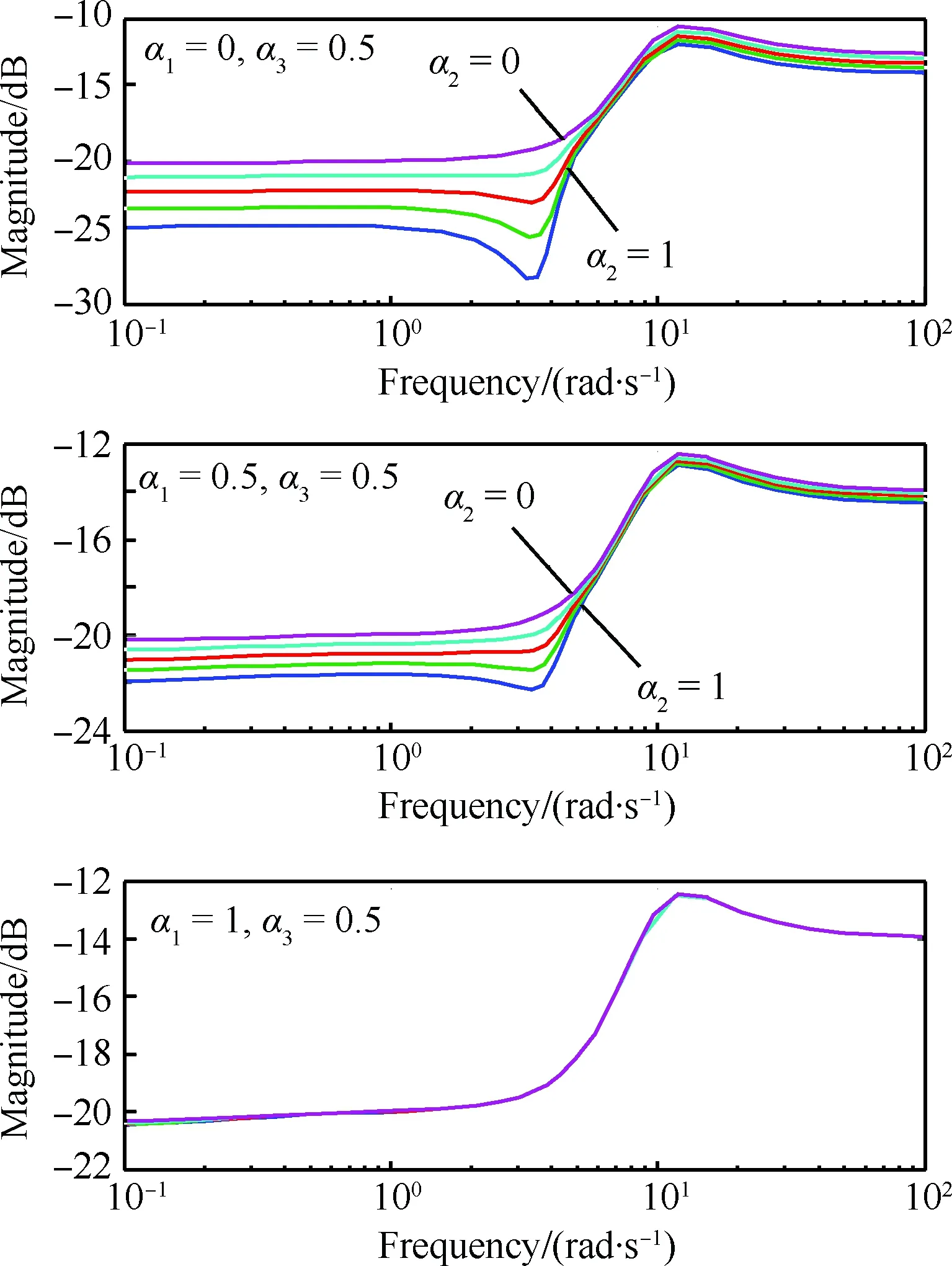
图4 不同α1且α2等差变化下Gt的幅频变化
Fig.4 Amplitude-frequency variations of Gtwith constant α1and equidifferent α2
对于主手1,α1=1、α2=0为理想透明度,其他情况下的幅频响应曲线距离其越远则表示透明性越差。由图3和图4不难看出,α1和α2对于Gt幅频变化的影响效果相反。当α3固定时,取α1=1,改变α2,或者取α2=0,改变α1,对Gt的幅频变化影响较小。
进一步分析α3对Gt幅频变化的影响。选α2为理想值α2=0,α1取等差数值,得到Gt的幅频变化曲线,如图5所示。图6为无时延影响下,不同α3和α1等差变化下Gt的幅频变化曲线。
从图5中可以看出,随着α3的增大,Gt的幅频变化也逐渐增大。当α3=0时,Zto1=Zcm1相当于主手1控制自身运动,主手2实现双边共享控制;当α3=0.5时,虽然主手2不会受到主手1的直接控制,但是会通过从手与主手1之间存在一定的交互;当α1=1,α3=1时,为主手1与从手的双边控制。由图5与图6的结果比较可知,当时延增大时,优势因子α1和α2对Gt幅频变化(尤其是高频)的影响减弱。
2.2.2 阻抗性能范围
根据Zto1min、Zto1max和Zto1width的定义可得
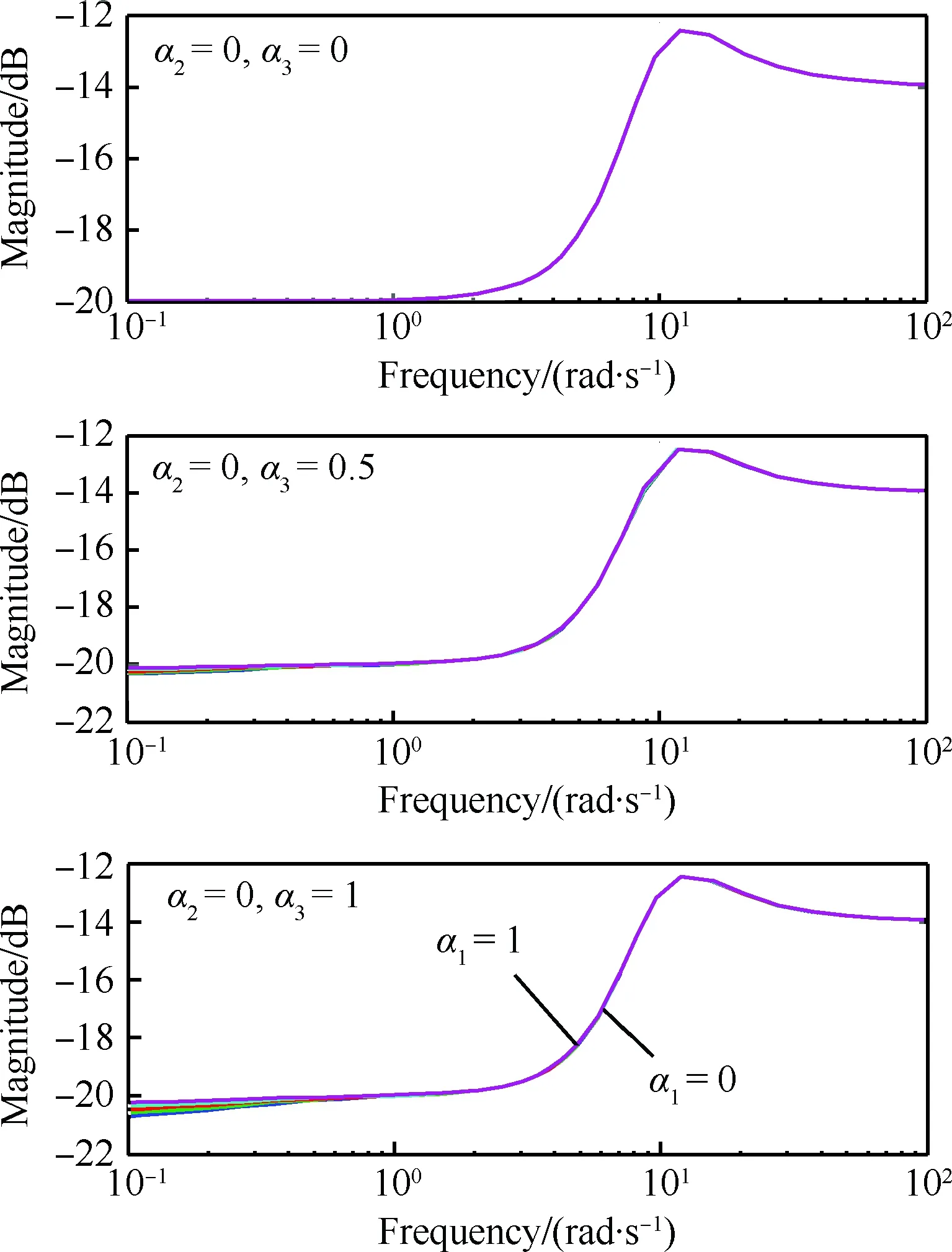
图5 不同α3且α1等差变化下Gt的幅频变化
Fig.5 Amplitude-frequency variations of Gtwith constant α3and equidifferent α1
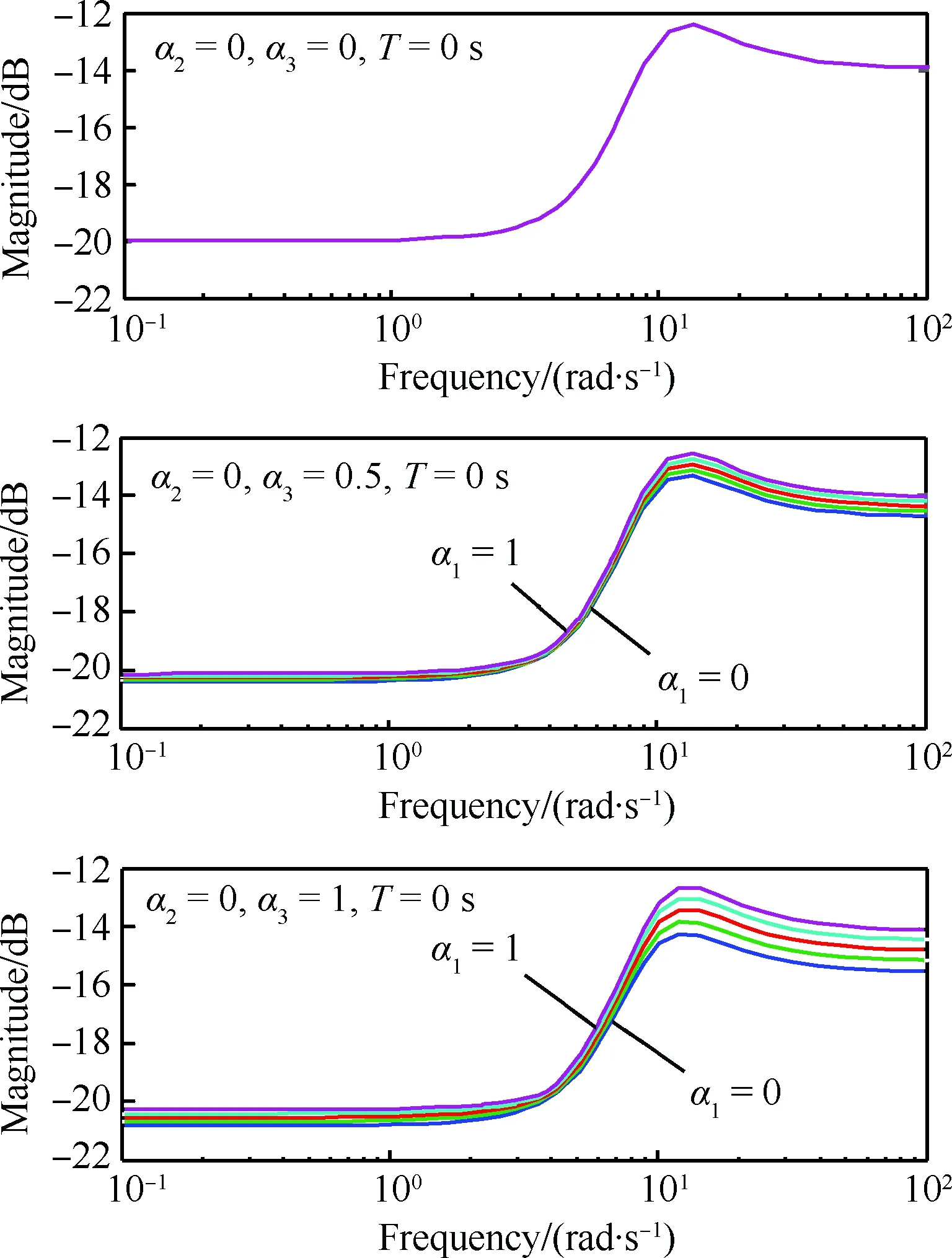
图6 无时延影响时不同α3和α1等差变化下Gt的幅频变化
Fig.6 Amplitude-frequency variations of Gtwith constant α3and equidifferent α1without time delay influence
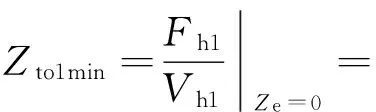


表2 传递阻抗的极值
Zto1min的取值范围与时间延迟环节有关,当T→0 s时,e-2sT→1,取α1=1,Zto1min的最小值取极小值0;当T→∞时,取α1=0,Zto1min的最小值为
此时,Zto1min与Zto1max的变化范围相同。理想情况下,Zto1min→0且Zto1width→∞,由表2不难得出当α2=0,α3=1时,Zto1width取最大值。同时由于受到系统稳定条件的限制,时延T会小于一定阈值,故当T→0 s时,Zto1width取最大值的条件为α2=0,α1=α3=1,此时α1和α2为理想值。取优势因子为α1=1,α2=0并化简Zto1width,分析α3取值对表现性能的影响。
进一步的,当T→0 s时,综合Zto1width的表达式,不难得出主手2的阻抗值Zh2和Zcm2对Zto1width的影响,如表 3所示。

表3 主手2的阻抗值对Zto1width的影响
通常情况下,Zh2≪Zcm2,选取较大的主手的控制增益Zcm可以减小优势因子变化对阻抗性能范围的影响。
2.2.3 性能测度
根据Disp(α1,α2)的定义,有
共享控制中,当α=0时,有
显然,Disp(0)与Zh2无关,在非对称共享控制中,有
除了时延T之外,Disp(0,1)还受α3和Zh2的影响,并且Disp(0,1)的值随着α3的增加而减小。由分析可知,α1和α2对Zto1性能变化的影响效果相反,故在讨论不同Zh2值下的Disp幅频变化时,取α3=0.5、T=1.5 s、α1和α2等差变化,结果如图7所示。
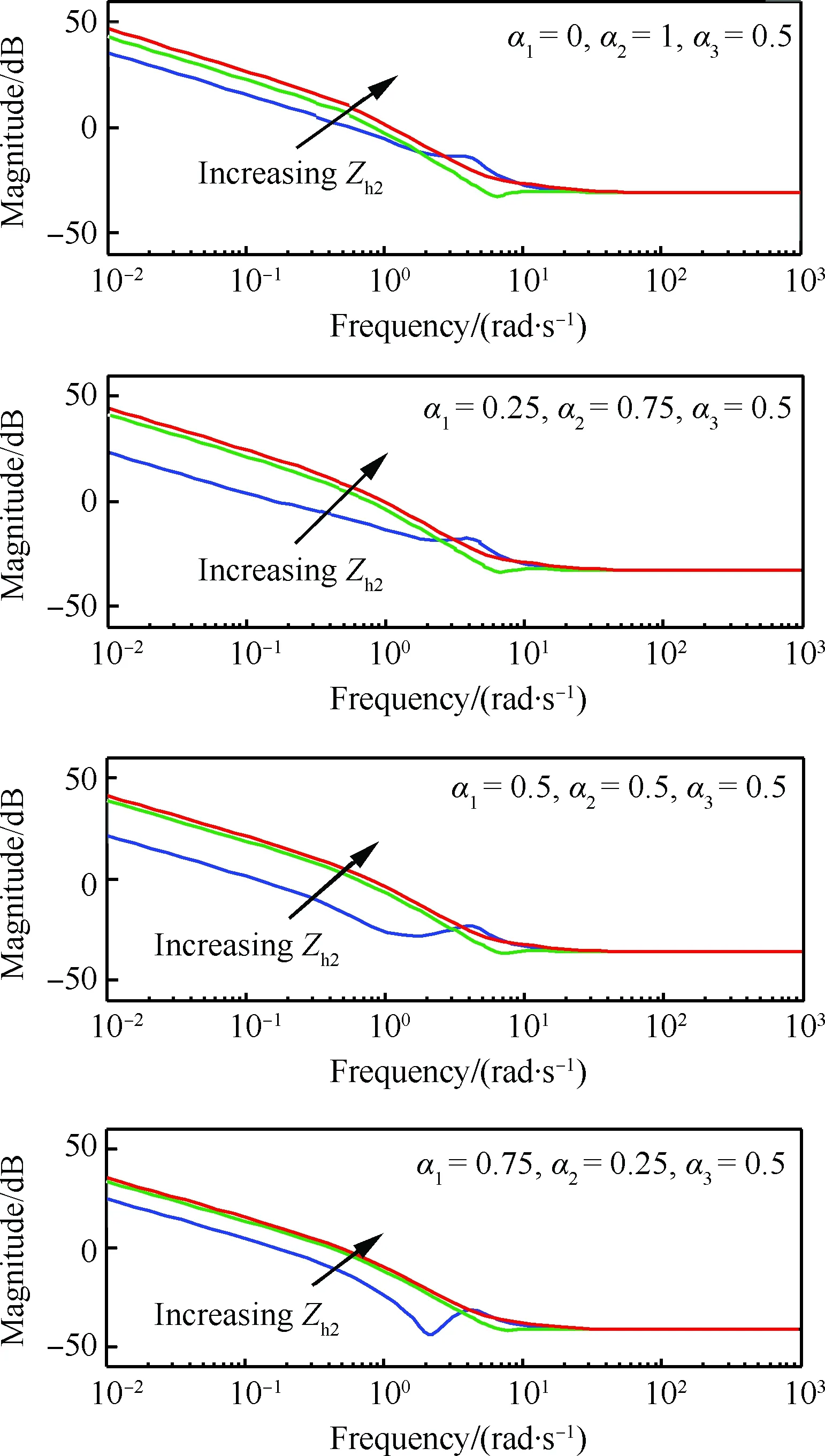
图7 不同α1、α2下Zh2值对Disp幅频的影响
Fig.7 Amplitude-frequency variations of Dispwith different Zh2and varying α1,α2
取Zh2为中等操作阻抗,分别针对自由运动、软环境、中等环境和硬操作环境下Disp的幅频变化进行比较分析,结果如图8所示。
图8 不同操作环境下的Disp幅频变化
Fig.8 Amplitude-frequency changes of Dispwith different manipulating environments
由图7可知,仅改变操作阻抗对|Disp|的幅频值变化影响较小;与图8结果相比较可知,环境阻抗Ze对|Disp|幅频相应特性的影响大于操作阻抗Zh2。由于在实际操作中,操作阻抗的变化范围要远小于环境阻抗的变化,故操作阻抗的变化(尤其是硬操作环境中)对系统透明性的影响较小,这与共享控制结果类似[13]。
2.2.4 传递阻抗比
在共享控制中,当α=1时,
此时,根据Vh1和Vh2的关系,可得
(8)
当Zcm2≫Zh2时,有Vh2≈Vh1,说明此时主手2的速度Vh2对主手1的速度Vh1具有很好的跟随性。在非对称共享控制中,当α1=1,α2=0时
Vh2=
K(α3)Vh1
K(α3)随着α3的增加而增加,当α3=1时,有
(9)
根据Ht的定义:
Ht=[α2(Ze+Zcs)Zcm2+(1-α2)α3·
ZcsZcm2e-2sT]/[(Ze+Zcs)(Zcm2+Zh2)-
(1-α3)(1-α2)ZcsZcm2e-2sT]
在中等操作环境下,采用紧控制方式,时延T=1.5s,α3和α2等差变化,对Ht幅频变化进行分析,结果如图9所示。
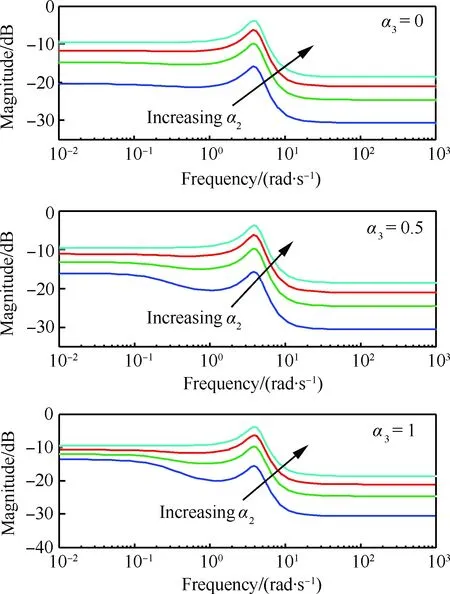
图9 不同α3且α2等差变化下Ht的幅频变化
Fig.9 Amplitude-frequency variations of Htwith different α3and equidifferent α2
理想的速度跟踪情况下Ht=1,幅频值为0。则由图9不难得知,随着α2的增大,运动跟随性越好;α3则会影响Ht随α2变化的疏密程度。当α3增加时,Ht的幅频变化变密,且受到时延的影响,低频情况下Ht的幅频变化更为明显,所以增加α2或者α3可以增加Vh2对Vh1的跟随性。
进一步根据式(9)和Ht的定义分析阻抗参数对Ht的幅频的影响,增大Zcs和Zcm2或者当Ze和Zh2较小的情况下都会增加Vh2对Vh1的跟随性。结合Vh1对Vh2的运动跟随性可知,增加Zcs或Ze较小时,主手之间的耦合程度会有所增加。
3 仿真与实验
3.1 仿真
包含3个仿真实验,条件如表1所示。
3.1.1 小时延情况下非对称共享控制与传统共享控制的对比实验
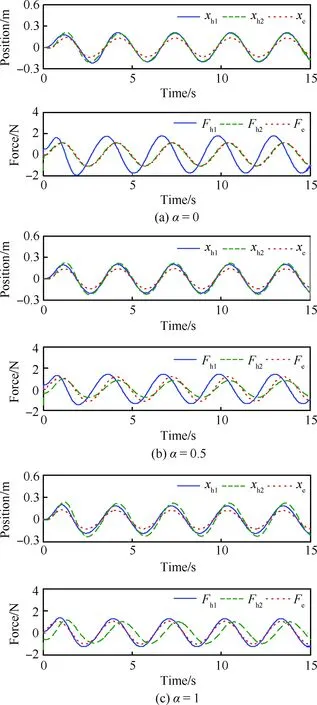
图10 不同α时传统双人共享控制下的位置和力比较
Fig.10 Comparison of positions and forces in shared control with different α
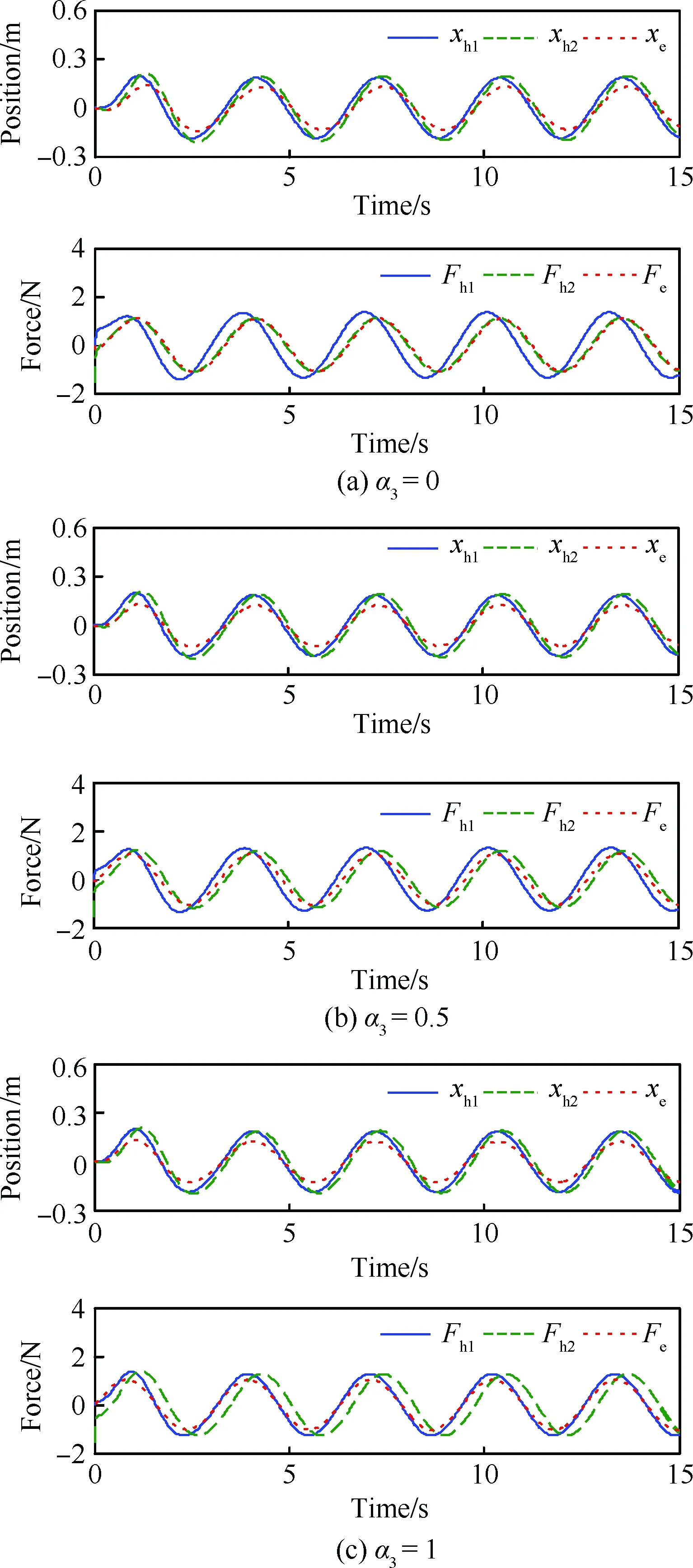
图11 不同α3时(α1=1,α2=0)非对称共享控制下的位置和力比较
Fig.11 Comparison of positions and forces in ideal asymmetric shared control with α1=1,α2=0 and different α3
从图10中可以看出,当时延较小时,选取不同的α值,主手与从手的位置幅值变化也不同。当α=0时,两主手之间的距离差较小,主手2的控制力与从手相重合,说明主手2对从手完全控制,主手1处于被动控制;由于此时主手2与从手之间为理想双边控制,主手1与主手2之间的差别反映为主手1与理想双边控制情况下位置和力的差距。当α=0.5时,两主手均与从手作用,从手作用力的幅值位于两主手之间。当α=1时,主手1与从手实现双边控制,其效果与α=0时,主手2对从手的效果相同。在共享控制中,主从手的位置和作用力幅值会随着α值的变化而变化。
图11为理想情况下(α1=1,α2=0)选取不同的α3值时,非对称共享控制下的主从手位置和力的变化情况。当α3=1时,两主手受力的幅值相同,但是会存在相位上的差异。在作用力上,从手作用力与主手2作用力的曲线重合,说明此时主手2完全控制从手;与传统双人共享控制α=0时情况不同的是,两主手与从手的幅值差更小,说明此时主手1虽然没有与从手形成双边控制,但是仍能较好地感受到从手的作用力。同样分析α3=0.5及α3=1的情况,不难发现虽然主手间的跟随效果不如传统双人共享控制,但是主从手的作用力幅值并没有发生较大的变化。由此可以得出结论:在非对称共享控制中,仅调节优势因子参数α3即可实现传统双人共享控制中的控制权从主手2到主手1的转化,同时还可以保证两主手相对于从手都具备较好的透明性。
可以通过进一步的仿真实验证明当α1的值减小、α2的值增加时,两主手与从手的控制作用力幅值差变化增大,说明此时系统的透明性变差。
3.1.2 大时延对传统共享控制与非对称共享控制影响效果的对比实验
与3.1.1节比较,分析大时延对传统双人共享控制和非对称共享控制效果的影响。分别取T=1 s和T=5 s,其他控制条件与3.1.1节相同,仿真结果如图12和图13所示。
将图12(b)、图13(b)与图10(b)、图11(b)相比较不难发现,在大时延影响下,传统双人共享控制中的主从手位置和作用力的幅值和跟随性都具有较大变化;而且随着时延的增加,从手位置和作用力的幅值与主手比例明显减小。但是在非对称共享控制中,除了从手幅值与主手比例减小外,两主手之间的相对位置并未发生较大变化。由非对称共享控制的运动学特性可知,通过调节控制阻抗可以增强从手对主手位置或作用力的跟随性。
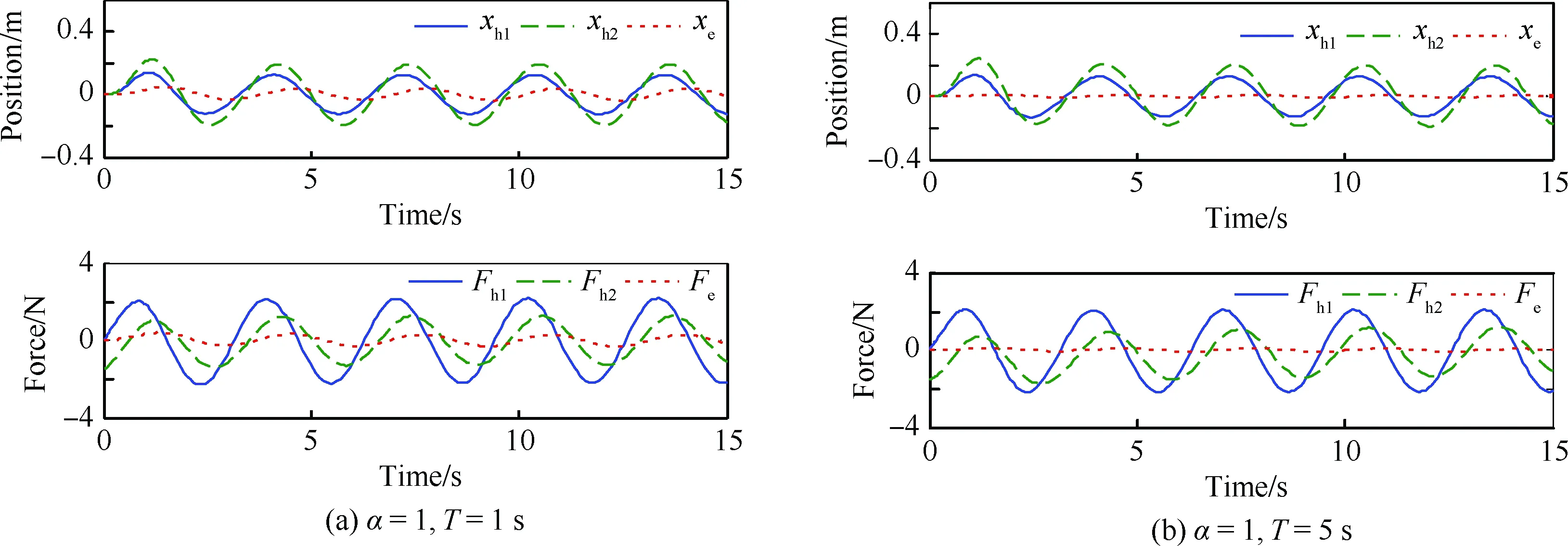
图12 α=1时,不同时延对传统双人共享控制中主从手的位置和力的影响
Fig.12 Influence of different delays on positions and forces of masters and slave in shared control method with α=1

图13 α3=1时(α1=1,α2=0),不同时延对非对称共享控制中主从手的位置和力的影响
Fig.13 Influence of different delays on positions and forces of masters and slave in asymmetric shared control method with α3=1 (α1=0,α2=1)
3.1.3 非对称共享控制主手间运动跟随性的仿真
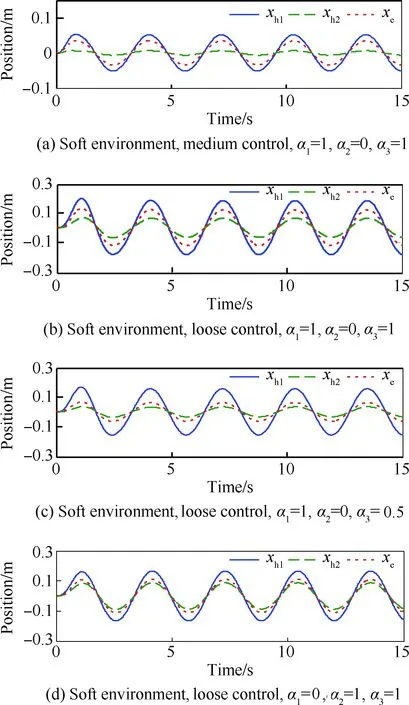
图14 非对称共享控制中参数变化对跟踪性的影响
Fig.14 Influence of varying parameters on position tracking performance in asymmetric shared control

3.2 实验
通过实验验证非对称共享控制的有效性,具体实验设计如下:通过Visual Studio 2005和Chai 3D 建立虚拟可视化实验平台,两位操作人员分别利用PHANToM和Omega手控器对平台对象进行控制,系统采用非对称共享控制,从手也使用具有虚拟质量和阻抗的点等效,如图15所示。
实验平台中,绘制0.03 m×0.03 m的矩形,如图15所示,并要求两主手控制从手点沿着矩形边界运动一周,其中红圈所在位置为出发点。非对称双人共享控制操作平台如图16所示。
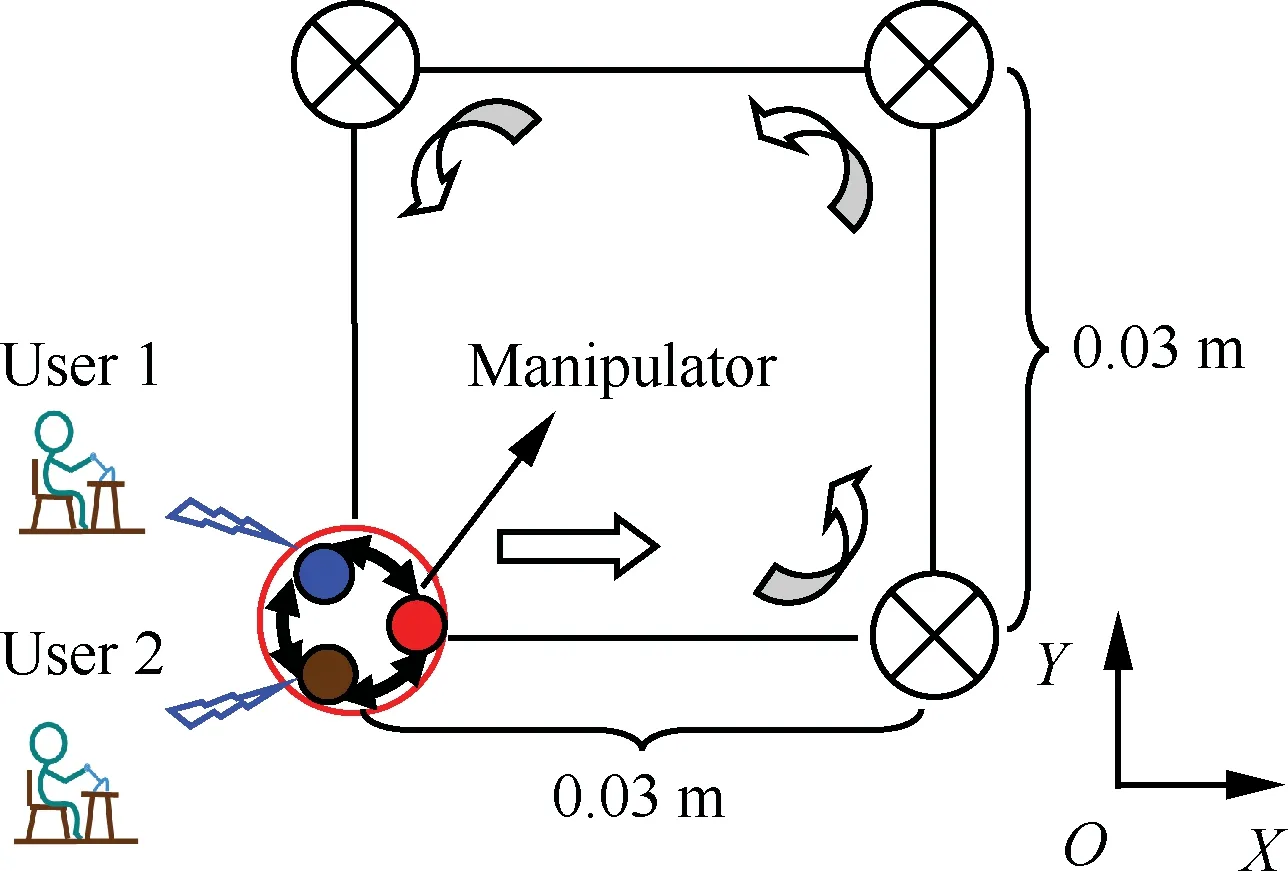
图15 主从手预定轨迹示意图
Fig.15 Sketch map of planned trajectory of masters and slave
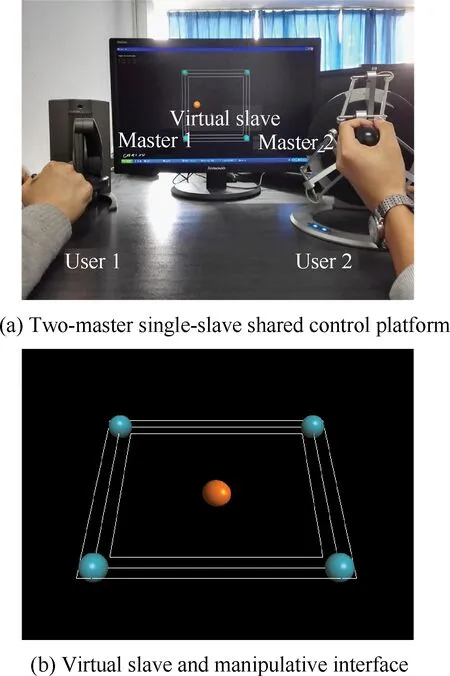
图16 非对称双人共享控制操作平台
Fig.16 Manipulative platform of asymmetric dual-user shared control
由于两操作手为非相同结构,在对操作机构重力抵消的基础上,对主从手设定相同的虚拟质量阻抗。为了保证从手具有较好的位置跟随性,在实验中,PD控制的参数选取要大于仿真数据。取Mm1=Mm2=Ms=5 kg,Bm1=Bm2=Bs=10 N·s/m,Km1=Km2=Ks=200 N/m,当α1=1,α2=0,α3=0.5时,从手操作环境为软环境,参数如表1所示,时延T=1.2 s,实验结果如图17~图19所示。
当α3=0.5时,从手由两个主手共享控制,且两主手对从手的控制效果相同,由图17~图19可知,此时从手的位置处于两主手之间,且会随着主手的变化而变化。虽然受到时延影响,主手的控制速度也不同,但是通过非对称共享控制方法,两主手均能感受到从手作用力的变化,具有较好的透明性。
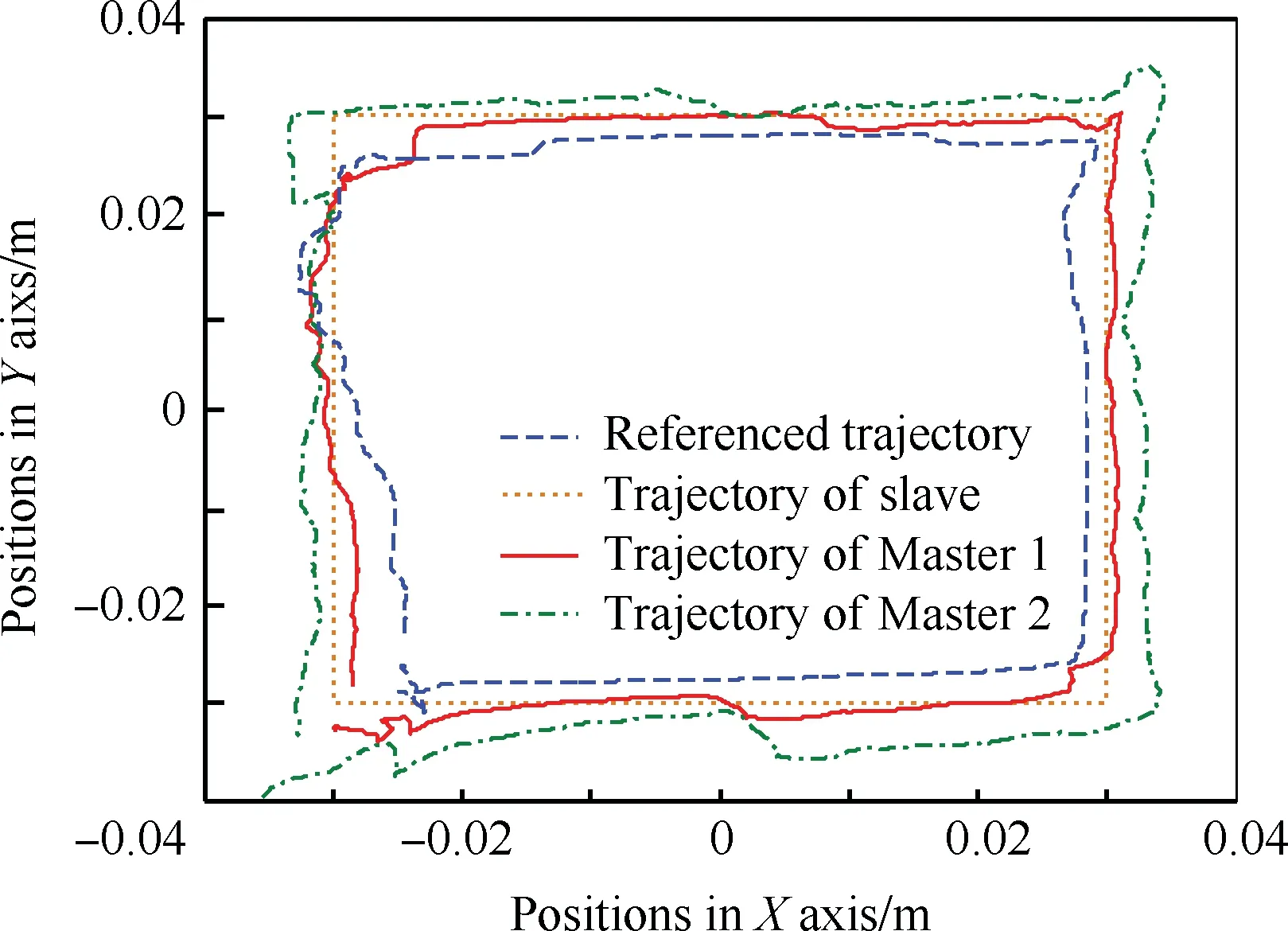
图17 主从手运动轨迹图
Fig.17 Trajectories of masters and slave
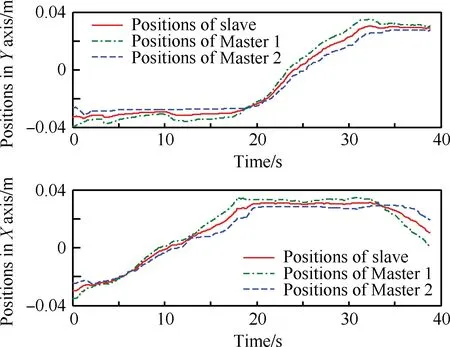
图18 主从手X轴和Y轴上的位置
Fig.18 Positions of masters and slave in X axis and Y axis

图19 主从手作用力
Fig.19 Control forces of masters and slave
4 结 论
相比于传统共享控制,非对称共享控制通过调节参数(包括优势因子、控制阻抗等)可以增强系统操作的透明性和抗时延影响。
1) 在透明性方面,增大主手1或减小主手2的优势因子可以增强主手操作的透明性并减小主手间的相互影响;选取较大的控制增益、控制阻抗、较硬的操作环境和较大时延时,可以减小透明性的波动范围。大时延环境下,相比于传统双人共享控制,非对称双人共享控制具有较好的抗时延影响特性,主手间的控制作用力差值较小。
2) 在跟随性方面,减小主手1的优势因子α1或增大主手2的优势因子α2、增加控制增益或减小被训操作者的操作阻抗可以增加主手之间的耦合程度,即增加主手之间的运动跟随性。
目前共享控制已经在遥操作的训练中得到一定的应用,非对称双人遥操作系统通过设定多个优势因子并按照相应的准则进行调节,可以提高操作的灵活性、透明性和运动跟随性。在此基础上,可以进一步针对两主手的操作功能作出划分,例如主手1可以作为辅助操作手并对主手2的操作进行监督和保护,或者与主手2进行协同操作,减小主手2在实时操作过程中的由于肌肉颤抖等原因造成的操作误差,这在空间精细操控和操作员切换操作起到作用。
[1] 李成, 梁斌. 空间机器人的遥操作[J]. 宇航学报, 2001, 22(1): 95-98. LI C, LIANG B. Teleoperation of space robotics[J]. Journal of Astronautics, 2001, 22(1): 95-98 (in Chinese).
[2] 丁炳源, 黄攀峰, 刘正雄, 等. 速度型虚拟夹具辅助空间遥操作技术研究[J]. 航空学报, 2013, 34(6): 1436-1444. DING B Y, HUANG P F, LIU Z X, et al. Research on space teleoperation technology assisted with velocity-based virtual fixture[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(6): 1436-1444 (in Chinese).
[3] SANCHEZ L A, LE M Q, LIU C, et al. The impact of interaction model on stability and transparency in bilateral teleoperation for medical applications[C]//Proceedings of IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2012: 1607-1613.
[4] HOKAYEM P F, SPONG M W. Bilateral teleoperation: An historical survey[J]. Automatica, 2006, 42(12): 2035-2057.
[5] 景兴建, 王越超, 谈大龙. 遥操作机器人系统时延控制方法综述[J]. 自动化学报, 2004, 30(2): 214-223. JING X J, WANG Y C, TAN D L. Control of time delayed tele-robotic systems: Review and analysis[J]. Acta Automatica Sinica, 2004, 30(2): 214-223 (in Chinese).
[6] ALDANA C, NUNO E, BASANEZ L. Bilateral teleoperation of cooperative manipulators[C]//Proceedings of IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ: IEEE Press, 2012: 4274-4279.
[7] FRANCHI A, SECCHI C, SON H I, et al. Bilateral teleoperation of groups of mobile robots with time-varying topology[J]. IEEE Transactions on Robotics, 2012, 28(5): 1019-1033.
[8] NUDEHI S S, MUKHERJEE R, GHODOUSSI M. A shared-control approach to haptic interface design for minimally invasive telesurgical training[J]. IEEE Transactions on Control Systems Technology, 2005, 13(4): 588-592.
[9] CARIGNAN C R, KREBS H I. Telerehabilitation robotics: Bright lights, big future?[J]. Journal of Rehabilitation Research and Development, 2006, 43(5): 695-710.
[10] GUPTA A, MALLEY M O. Design of a haptic arm exoskeleton for training and rehabilitation[J]. IEEE/ASME Transaction Mechatronics, 2006, 11(3): 280-289.
[11] 刘霞. 遥操作系统的控制结构与控制方法综述[J]. 兵工自动化, 2013, 32(8): 57-63. LIU X. Survey of control architectures and control method of teleoperation system[J]. Ordnance Industry Automation, 2013, 32(8): 57-63 (in Chinese).
[12] KIM W S. Shared compliant control: A stability analysis and experiments[C]//Proceedings of IEEE International Conference on Systems, Man and Cybernetics. Pisacataway, NJ: IEEE Press, 1990: 620-623.
[13] KHADEMIAN B, HASHTRUDI-ZAAD K. A four-channel multilateral shared control architecture for dual-user teleoperation systems[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2007: 2660-2666.
[14] KHADEMIAN B, HASHTRUDI-ZAAD K. Dual-user teleoperation systems: New multilateral shared control architecture and kinesthetic performance measures[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(5): 895-906.
[15] KHADEMIAN B, HASHTRUDI-ZAAD K. Novel shared control architectures for enhanced users’ interaction in haptic training simulation systems[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2009: 886-892.
[16] KHADEMIAN B, HASHTRUDI-ZAAD K. Unconditional stability analysis of dual-user teleoperation systems[C]//Proceedings of IEEE Haptics Symposium. Piscataway, NJ: IEEE Press, 2010: 161-166.
[17] KHADEMIAN B, HASHTRUDI-ZAAD K. A robust multilateral shared controller for dual-user teleoperation systems[C]//Proceedings of IEEE Canadian Conference on Electrical and Computer Engineering. Piscataway, NJ: IEEE Press, 2008: 1871-1876.
[18] RAZI K, HASHTRUDI-ZAAD K. Analysis of coupled stability in multilateral dual-user teleoperation systems[J]. IEEE Transactions on Robotics, 2014, 30(3): 631-641.
[19] LI J, TAVAKOLI M, HUANG Q. Absolute stability of multi-DOF multi-lateral haptic systems[J]. IEEE Transactions on Control System Technology, 2014, 22(6): 2319-2328.
[20] SHAHBAZI M, TALEBI H A, TOWHIDKHAH F. A robust control architecture for dual user teleoperation system with time-delay[C]//Proceedings of IEEE IECON 36th Annual Conference on Industrial Electronics Society. Piscataway, NJ: IEEE Press, 2010: 1419-1423.
[21] SHAHBAZI M, TALEBI H A, ATASHZAR S F, et al. A novel shared structure for dual user systems with unknown time-delay utilizing adaptive impedance control[C]//Proceedings of IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2011: 2124-2129.
[22] SHAHBAZI M, TALEBI H A, ATASHZAR S F, et al. A new set of desired objectives for dual-user systems in the presence of unknown communication delay[C]//Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Piscataway, NJ: IEEE Press, 2011: 146-151.
[23] SHAHBAZI M, TALEBI H A, YAZDANPANAH M J. A control architecture for dual user teleoperation with unknown time delays: A sliding mode approach[C]//Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Piscataway, NJ: IEEE Press, 2010: 1221-1226.
[24] MALYSZ P, SIROUSPOUR S. Nonlinear and filtered force/position mappings in bilateral teleoperation with application to enhanced stiffness discrimination[J]. IEEE Transactions on Robotics, 2009, 25(5): 1134-1149.
鹿振宇 男, 博士研究生。主要研究方向: 空间机器人遥操作。
Tel: 029-88460366
E-mail: lzy_robot@163.com
黄攀峰 男, 博士, 教授, 博士生导师。主要研究方向: 空间绳系机器人, 空间机器人遥操作技术。
Tel: 029-88460366
E-mail: pfhuang@nwpu.edu.cn
戴沛 男, 硕士研究生。主要研究方向: 空间机器人遥操作技术。
Tel: 029-88460366
E-mail: daipei@qq.com
Received: 2015-03-02; Revised: 2015-05-13; Accepted: 2015-07-28; Published online: 2015-08-28 09:25
URL: www.cnki.net/kcms/detail/11.1929.V.20150828.0925.006.html
Foundation items: National Natural Science Foundation of China (11272256, 61005062, 60805034)
*Corresponding author. Tel.: 029-88460366 E-mail: pfhuang@nwpu.edu.cn
Asymmetric dual-user shared control method and its performanceanalysis for space teleoperation
LU Zhenyu1,2, HUANG Panfeng1,2,*, DAI Pei1,2
1.ResearchCenterforIntelligentRobotics,SchoolofAstronautics,NorthwesternPolytechnicalUniversity,Xi’an710072,China2.NationalKeyLaboratoryofAerospaceFlightDynamics,NorthwesternPolytechnicalUniversity,Xi’an710072,China
The technique of multi-master multi-salve teleoperation is one of future space teleoperation tendencies. After summarizing the current studies about dual-master single slave teleoperation control mode, we propose a kind of asymmetric dual-user shared teleoperation method for space manipulation. Firstly, we analyze the ideal transparency of dual-user teleoperation, discriminate the difference of multi-dominant parameters and build the model of asymmetric dual-user teleoperation system under the influence of delay. Then the functions of transparency transfer, range of achievable impedance, performance distance and transmitted impedance rate are built to compare and analyze the influence of dominant parameters, control impedance and environment impedance to the kinesthetic performance of dual-user teleoperation. Finally, the simulations and experiments are taken to certify the effectiveness of the proposed method. The simulation results represent that the transparency and the anti-delay performance of the asymmetric dual-user shared control method are better than the traditional method.
teleoperation; asymmetric dual-user shared control; dominant parameters; performance analysis; transparency
2015-03-02;退修日期:2015-05-13;录用日期:2015-07-28; < class="emphasis_bold">网络出版时间:
时间: 2015-08-28 09:25
www.cnki.net/kcms/detail/11.1929.V.20150828.0925.006.html
国家自然科学基金 (11272256, 61005062, 60805034)
.Tel.: 029-88460366 E-mail: pfhuang@nwpu.edu.cn
鹿振宇, 黄攀峰, 戴沛. 面向空间遥操作的非对称双人共享控制及其性能分析[J]. 航空学报, 2016, 37(2): 648-661. LU Z Y, HUANG P F, DAI P. Asymmetric dual-user shared control method and its performance analysis for space teleoperation[J]. Acta Aeronautica et Astronuatica Sinica, 2016, 37(2): 648-661.
http://hkxb.buaa.edu.cn hkxb@buaa.edu.cn
10.7527/S1000-6893.2015.0211
V19
:A
: 1000-6893(2016)02-0648-14
*
猜你喜欢
设计(2022年8期)2022-05-25 05:27:44
建材发展导向(2021年9期)2021-07-16 07:11:16
——为小提琴与钢琴而作
黄河之声(2021年19期)2021-02-24 03:25:26
通信技术(2018年4期)2018-05-05 07:30:04
制造技术与机床(2017年6期)2018-01-19 02:41:22
创新作文(小学版)(2016年10期)2016-11-11 05:45:09
创新作文(1-2年级)(2016年4期)2016-05-14 12:45:16
电测与仪表(2016年24期)2016-04-12 00:21:04
探测与控制学报(2015年4期)2015-12-15 15:00:56
软件导刊(2015年2期)2015-04-02 12:10:43