
重载航空负载模拟器非线性最优前馈补偿控制
2016-02-24 07:00欧阳小平李锋朱莹杨上保杨华勇
航空学报 2016年2期
欧阳小平, 李锋, 朱莹, 杨上保, 杨华勇
1.浙江大学 流体动力与机电系统国家重点实验室, 杭州 310027 2.航空机电系统综合航空科技重点实验室, 南京 211100
重载航空负载模拟器非线性最优前馈补偿控制
欧阳小平1,*, 李锋1, 朱莹2, 杨上保2, 杨华勇1
1.浙江大学 流体动力与机电系统国家重点实验室, 杭州 310027 2.航空机电系统综合航空科技重点实验室, 南京 211100
重载航空负载模拟器是用来模拟“C919”、“运-20”等重载飞机舵面工作载荷的地面仿真平台。设计了一种重载航空负载模拟器,采用非对称缸作为执行机构以在小体积下完成大载荷加载。为了消除多余力对重载航空负载模拟器加载精度的影响,分析了非对称缸正反向运动和大载荷变化下伺服阀流量增益的非线性变化对前馈补偿函数的影响,并设计了非线性参数估计控制器。同时分析了加速度等动态参数变化和静态参数的误差对多余力消除的影响,设计了参数最优控制器。仿真和试验结果均表明,相比于传统前馈补偿控制器,所设计的非线性最优前馈补偿控制器下的加载精度和多余力抑制能力提高了50%以上。
重载; 负载模拟器; 多余力; 非线性控制; 前馈控制
研制和发展大飞机,不仅是快速增长的航空市场的需求,也是促进产业发展和多学科进步的需求。民用大飞机“C919”、军用大飞机“运-20”等重载飞机的发展在应对抢险救灾、人道援助等方面具有重要意义[1]。重载航空负载模拟器主要是用来在重载飞机地面测试时,为舵面加载飞行状况下的负载,测试飞机舵面在带载状态下的可靠性和控制性能。重载航空负载模拟器的研制能够缩短重载飞机的研制周期,对于重载飞机的发展意义重大[2-4]。
重载航空负载模拟器是一种典型的位置干扰力(矩)控制系统。在整个加载过程中,由于需要跟随位置系统移动,因此产生了强迫流量从而产生多余力,对于整个加载精度造成很大影响。当进行大功率、重载试验时,多余力甚至高达加载值的5~10倍,因此消减多余力是负载模拟器研制的关键[4-5]。针对多余力消除的问题,国内外进行了深入的研究,其方法主要分为3类:
1) 文献[6]利用位置同步马达来实现位置跟踪,然后在其转子上再安装一个加载马达完成系统加载。文献[7]采用双阀控制原理,两个阀分别完成位置跟踪和系统加载。这类方法通过附加硬件来完成位置跟踪,结构复杂,成本较高。
2) 文献[8-9]采用了定量反馈理论(QFT)设计了控制器,文献[10-12]采用非线性鲁棒控制、文献[13-15]采用了模糊控制方法以及文献[16-17]采用了神经网络控制方法来消除多余力。这类方法将多余力看作干扰力,利用智能算法来完成控制,对控制器要求较高。
3) 文献[18]对阀控非对称缸被动式加载系统建立了数学模型,采用双向前馈补偿控制器进行控制。文献[19]在传统的速度同步控制基础上,增加了舵面与加载系统的速度差进行二次补偿。文献[20]采用自适应非线性优化补偿控制,该方法将加载力误差最小化作为系统的控制目标,在动态加载的过程中对非线性参数实时估计。这类方法均是在速度补偿控制的基础上,利用自适应等方法进行改进,方法简单、效果明显且对控制器要求较低。
以双出杆缸或液压马达作为负载模拟器执行机构的轻载负载模拟器已经取得了大量的研究成果,但对于“C919”和“运-20”等重载飞机舵面需要承受重载的场合,目前能够实现大载荷加载的负载模拟器的相关研究还很少。如何在有限的空间内完成大载荷加载,以及大载荷变化时能否完成高精度的跟踪性能是重载航空负载模拟器研制过程中遇到的两个难点。
针对以上问题,本文采用非对称缸作为负载模拟器执行机构,在小空间内完成重载荷加载。采用非线性最优前馈补偿控制器,有效抑制多余力并实现在大载荷变化时良好的跟踪性能。
1 系统数学模型及补偿环节分析
1.1 数学模型
航空负载模拟器结构如图1所示,左侧为力加载系统,右侧为舵面系统。两套系统刚性连接,均采用伺服阀来控制非对称缸运动。两套系统中间安装一个力传感器来完成力闭环控制,舵面系统的非对称缸内安装一个位移传感器来完成位移闭环控制。
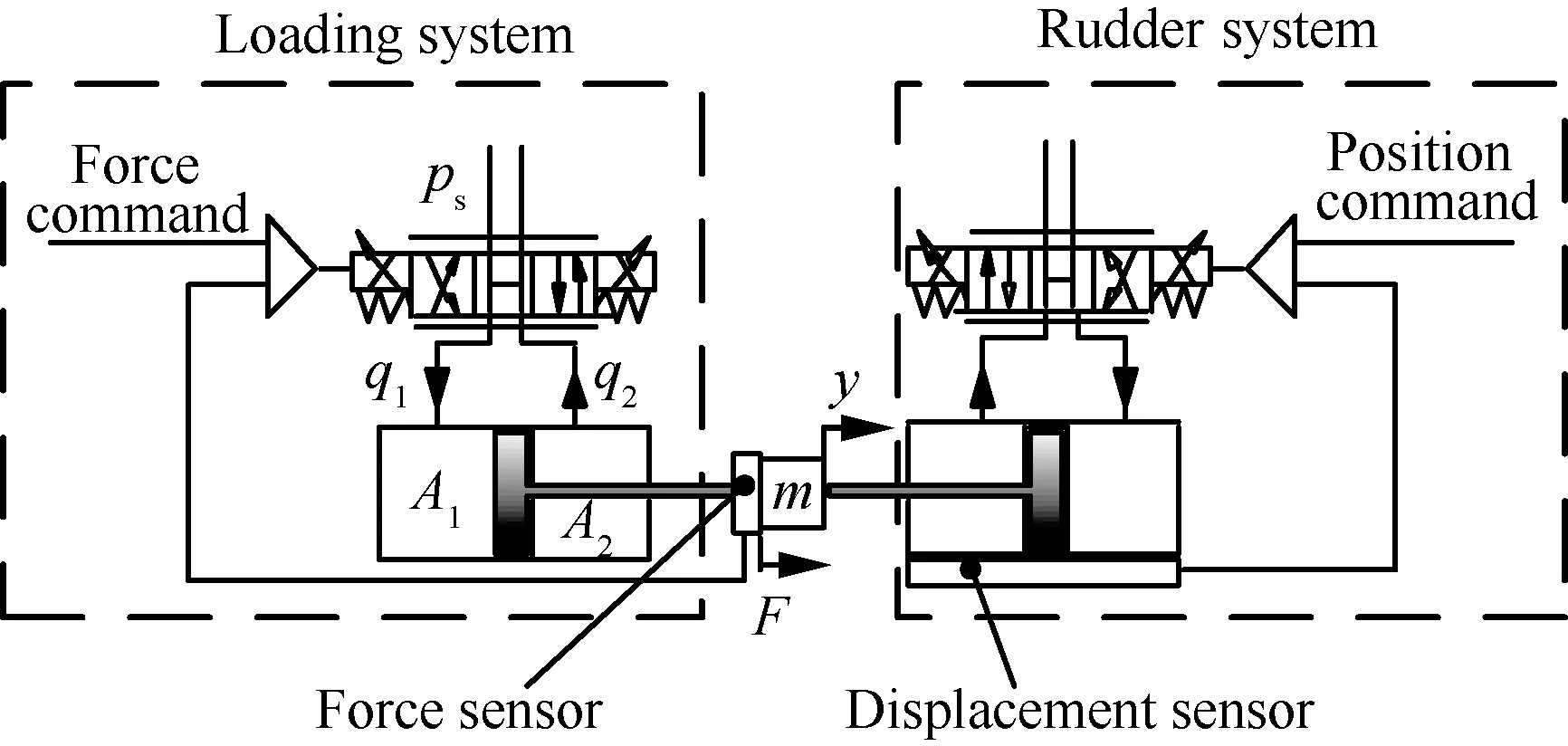
图1 航空负载模拟器结构
Fig.1 Architecture of aviation load simulator
由伺服阀节流口方程可得
(1)
式中:q1和q2分别为流入加载缸无杆腔和流出有杆腔流量,m3/s;p1和p2分别为加载缸无/有杆腔压力,Pa;ps为供油压力,Pa;Cd为加载阀流量系数;xv为加载阀阀芯位移,m;ω为加载阀窗口梯度;ρ为油液密度,kg/m3。
因为运动产生的容积变化较小可忽略,根据液压缸流量连续性方程可得
(2)
式中:A1和A2为加载缸无/有杆腔面积,m2;Vt为加载缸两腔的容积,m3;βe为系统油液弹性模量,Pa;Cip为加载缸内泄系数,m5/(N·s);y为活塞位移,m;
忽略摩擦力,根据力平衡方程可得
(3)
式中:B为活塞杆与液压缸之间的黏性阻尼系数, N·s/m;m为两系统活塞杆、液压质量以及惯性负载折算质量,kg;F为舵面系统所受加载力,N。
根据式(1)~式(3),得到负载模拟器模型框图如图2所示,图中:U为伺服阀输入电压。
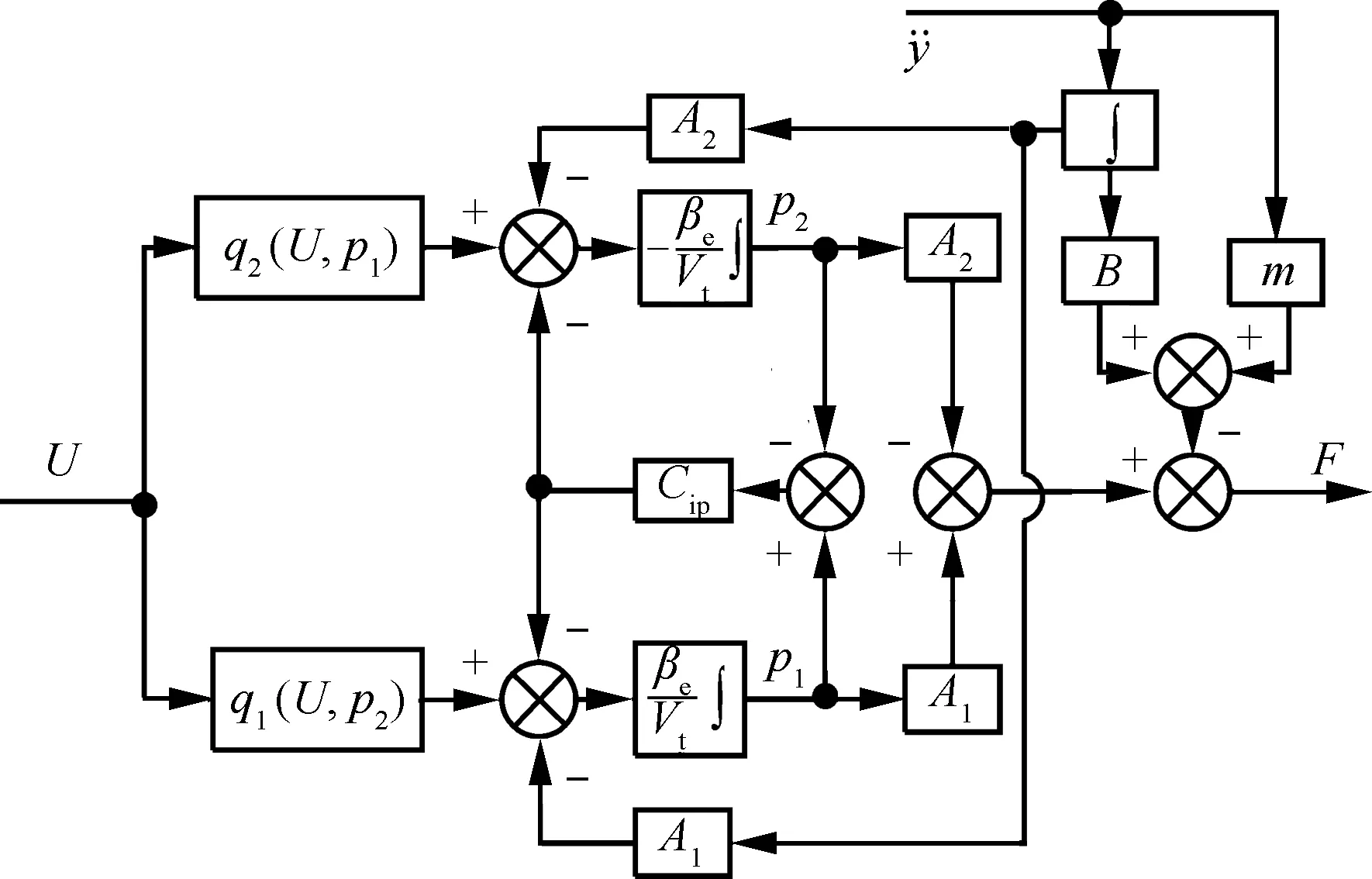
图2 负载模拟器模型框图
Fig.2 Block diagram of load simulator model
从图2中可以看出,当舵面系统工作而力加载系统不工作时,由于两套系统之间存在一种强耦合关系,力加载系统也会产生一定的多余力。舵面系统的运动会对力加载系统的加载精度产生巨大的影响。为了定量地描述两套系统相互之间的耦合关系以及其动态特性,根据能量守恒定律定义负载压力和流量[21]分别为
(4)
(5)
式中:n为加载缸有杆腔与无杆腔的面积比;pL为加载缸负载压力,Pa;qL为加载缸负载流量,m3/s。
当系统运动扰动较小时,伺服阀阀口工作在零位附近,综合式(1)、式(4)和式(5)并正反向分别线性化可得伺服阀流量线性化方程[22]为
(6)
式中:Kq为加载伺服阀流量增益,m2/s;Kc为加载伺服阀流量-压力系数,m5/(N·s)。
综合式(1)、式(2)和式(5),可得液压缸流量连续性方程为
(7)
式中:Ct和Cts均为内泄负载压力等效系数, m5/(N·s)。
为了避免运动扰动激发伺服阀的动态特性,采用了高频响伺服阀,其频宽远大于系统工作频率,故可以认为是一个线性环节。
xv=KvU
(8)
式中:Kv为伺服阀阀芯增益系数,m/V。
将式(3)、式(6)~式(8)合并,并进行Laplace变换后整合可得
(9)
式中:
1.2 前馈补偿环节分析
从式(9)中可以看出,加载力由两部分组成:伺服阀阀芯动作控制的力和由舵面系统运动产生的干扰力,即多余力Fad:
(10)
从式(10)的分子中可以看出,多余力与舵面系统运动速度、加速度以及加速度变换率有关。
为了消除多余力,通常利用前馈补偿控制器,其基本原理如图3,是用速度信号作为前馈补偿控制器的输入,经过前馈控制器运算后,输出值作为补偿值来完成系统的速度同步控制。

图3 前馈补偿原理图
Fig.3 Diagram of feedforward compensation principle
根据结构不变性原理和图3可得前馈补偿函数为
(11)
2 非线性补偿控制器
由式(11)可知,前馈补偿控制器设计存在两个问题:
1) 前馈补偿函数分子项λ1s与速度、加速度以及加加速度有关。若要完全补偿,需要对位置信号做二次微分以及三次微分,但由于噪声的存在,将很难保证精度。此外,加工和参数测量的误差以及活塞缸运动时容积的时变特性也会对前馈补偿函数产生影响。
2) 由前馈补偿函数分母项λ2可知,非对称缸在载荷大范围变化时,流量增益Kq会随着负载和运动方向变化实时发生非线性变化,从而导致前馈补偿函数发生非线性变化。针对非对称缸负载模拟器执行机构的情况,传统上常采用双向不同固定值切换前馈补偿,对于载荷小范围变化时可以获得较好的效果,但对于非对称缸在大载荷变化工况下就难以取得良好效果,在一些极端工况下甚至失效。
为了方便描述以上两种因素对多余力消除产生的影响,定义λ1为多余力干扰系数、λ2为非线性干扰系数。
非线性最优前馈补偿控制器如图4所示,在PID控制器的基础上,利用参数最优化控制器克服λ1变化产生的影响,利用非线性参数估计控制器克服λ2变化产生的影响。通过力传感器获得所需的力信号并与力控制信号Fc对比计算所需的力偏差值e;通过位移传感器来获得位移信号并与位置控制指令yc对比完成位置控制。
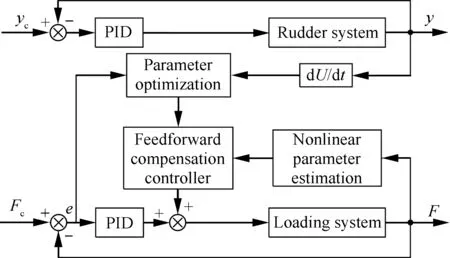
图4 非线性最优前馈补偿控制器
Fig.4 Nonlinear optimal feedforward compensation controller
2.1 参数最优化控制器
当实现完全前馈补偿时,Gb(s)=λ1s/λ2。由于多余力干扰系数λ1既与A1、m、B和ps等静态参数有关,也与加速度和加速度变化值等动态参数有关,由式(9)得到的参数在实际应用时很难获得完全补偿。
根据式(10)分析可得
欠补偿时(Gb(s)<λ1s/λ2),通过PID控制器力静态值跟踪偏差e>0 N;过补偿时(Gb(s)>λ1s/λ2),则通过PID控制器力静态值跟踪偏差e<0 N。

欠补偿时(Gb(s)<λ1s/λ2),通过PID控制器力静态值跟踪偏差e<0 N;过补偿时(Gb(s)<λ1s/λ2),则通过PID控制器力静态值跟踪偏差e>0 N。
对于一般负载模拟器,系统在20 Hz运动扰动时,多余力主要由于速度项产生,加速度以及加加速度产生的多余力只占总多余力的1%左右。因此,当加速度以及加加速度在高频小幅度变化时,对系统产生的影响较小。只要在初始调节完成后,飞行舵面处于正常运行时,参数动态变化、加速度以及加加速度并不会导致多余力干扰系数发生十分迅速的变化。
综合上述分析,为了实现完全补偿,根据运动方向以及偏差信息,采用步进式参数寻优方法,实时调整干扰系数λ1,可以有效抑制多余力。设计参数最优化控制器为
(12)

综合式(9)和式(12)可得
(13)
2.2 非线性参数估计控制器
根据式(9)可知,非线性干扰系数λ2与Kq、Kv有关,其中Kv为静态变量,故当载荷变化时只有Kq将发生变化。
通过式(6)中的定义可知,对于绝大多数确定的pL,当阀芯向不同方向运动时,Kq会发生跃变;在同一方向运动且载荷变化大时,pL发生较大变化,Kq会发生非线性变化。
由伺服阀节流口方程和式(8)可得
(14)
式中:qn为伺服阀额定流量,m3/s;Δpn为伺服阀额定流量下的压降,Pa;Umax为伺服阀最大输入电压,V。
综合式(4)、式(8)、式(9)和式(14)可得
(15)
式中:
2.3 稳定性分析
由于前馈补偿控制器和非线性参数估计控制器均为开环控制,本身并不会对系统稳定性产生影响。只有参数最优控制器,利用偏差信号形成步进式闭环控制,会对系统的稳定性产生影响。
忽略参数最优化开启阈值,结合式(9)和式(11),可知参数最优控制器输入输出传递函数为
(16)
由于本文设计的参数最优控制器是基于步进寻优,故相当于被积函数为符号函数的积分器。代入系统参数,速度取研究对象最大值,得到前馈补偿函数的Bode图,如图5所示。从图5中可以看出,系统最大相角为-180°,系统全频稳定。当系统自身运动变化导致的输入量变化时,系统属于低频段,具有幅值增量大、稳定性余量大的特点。
此外,为了抑制由于采用步进式积分器而导致的输入量自身振荡,本文设置了寻优开启阈值。若开启阈值大于最小步长产生的偏差,当系统偏差在开启阈值以内时,参数最优控制器输出值为固定值不会产生振荡,这时非线性最优补偿控制器仅为一个开环控制器,不会影响系统的稳定性。

图5 前馈补偿函数的Bode图
Fig.5 Bode diagram of feedforward compensation function
3 仿真分析
3.1 参数设置
基于MATLAB Simulink软件平台,根据图2 所示的非线性数学模型搭建系统仿真模型,模型参数如表1所示。PID控制器比例参数KP和积分参数KI通过齐格勒-尼柯尔斯法则整定,固定补偿控制器以空载状态正向运动进行设计,双向补偿控制器以空载状态设计其正反向非线性干扰系数λ2±。在正常工况下,速度项以外项产生的多余力只占总多余力1%,PLC循环周期为0.8 ms,为了调整的快速性和系统跟踪的准确性,设f0(e,y)=A1,f为A1的1‰。根据多余力控制15%精度,eh取加载幅值的1%,当处于研究对象的最大速度,步长f对应的力步进变化稳态值为36.33 N,为防止产生振荡,eh取最小值为100 N,控制器具体参数如表2。

表1 仿真模型参数

表2 控制器参数
3.2 仿真分析
为了测试控制效果的有效性,共进行6组试验,试验结果如图6~图9所示。
3.2.1 多余力干扰系数影响仿真分析
在1 Hz、5 mm正弦位置干扰情况下,力恒值0 N 加载,多余力曲线如图6所示。由非线性参数估计控制器确定非线性干扰系数λ2,多余力干扰系数λ1分别取0.01,0.009 6,0.009。3种状态下,最大多余力分别为同向850 N,反向400 N,反向1 480 N。从3组曲线的对比中可以看出,当多余力干扰系数偏小时,前馈补偿不足,从而导致系统仍有较大的反向多余力;当干扰系数偏大时,产生前馈过补偿,从而导致产生了同向多余力。合适的前馈补偿系数能够大幅减小多余力。

图6 不同多余力干扰系数影响
Fig.6 Influence of different surplus force coefficients
3.2.2 静态值跟踪多余力仿真分析
在1 Hz、5 mm正弦位置干扰情况下,加载系统分别加载恒值50 000,0,-50 000 N,多余力曲线如图7所示。在0 N的固定值加载下,固定值补偿控制器在正向运动时的最大多余力为540 N,但反向时的最大多余力达到了5 800 N;双向补偿控制器正反向运动时的最大多余力均为540 N。通过两者对比可以得出,非对称缸正反向运动时动态参数的变化使得一个前馈补偿系数在正向运动时得到合适的补偿,但反向时将会产生较大的多余力。对比图7中的3幅图可以发现,双向补偿控制器在50 000,0,-50 000 N 加载时的最大多余力分别为4 200,540,6 500 N;非线性控制器在3种加载状态下的最大多余力均为450 N。说明在加载力大范围变化时,系统流量增益发生了较大变化,从而导致一个固定补偿系数在0 N状态下能够得到合适的补偿;但在±50 000 N 时,补偿效果减弱,存在较大多余力,而非线性控制器在加载力变化较大时均能够跟踪系统的变化,大幅消除多余力。

图7 不同静态力多余力仿真曲线
Fig.7 Simulation curves of surplus force under different static forces
3.2.3 动态加载跟踪仿真分析
在0.5 Hz、10 mm正弦位置干扰情况和1 Hz、5 mm正弦位置干扰情况下,0.5 Hz、50 000 N 力的正弦加载跟踪曲线分别如图8(a)和图8(b)所示。从图8(a)中可以看出,在低频响大位移干扰加载工况下,双向补偿控制器的最大多余力达到了2 660 N,非线性最优补偿控制器正反向的最大多余力仅为1 100 N。从图8(b)中可以看出,在高频响小位移干扰加载工况下,双向补偿控制器的最大多余力达到了6 000 N,而非线性最优补偿控制器最大多余力仅为2 100 N。在两种工作条件下,非线性最优补偿控制器相比于双向补偿控制效果,其多余力消除分别提高了58.7%和68.7%。

图8 不同情况下正弦加载(0.5 Hz、 50 000 N)的仿真结果
Fig.8 Simulation results under sine loading (0.5 Hz, 50 000 N) of different cases
在变幅值0.5 Hz正弦位置干扰情况下,5 000 N/mm 梯度力加载跟踪曲线如图9所示。

图9 变幅值正弦干扰下5 000 N/mm加载梯度仿真曲线
Fig.9 Simulation curves under variable amplitude position disturbance and 5 000 N/mm loading gradient
从图9中可以看出,在变幅值正弦加载过程中,双向补偿控制器的最大多余力达到了6 600 N,而非线性最优补偿控制器正反向的最大多余力仅为3 200 N。相比于双向补偿控制器,非线性最优补偿控制器的多余力消除效果在幅值增大时较为明显,幅值最大时多余力抑制效果提高了51.5%。
4 试验分析
4.1 试验台
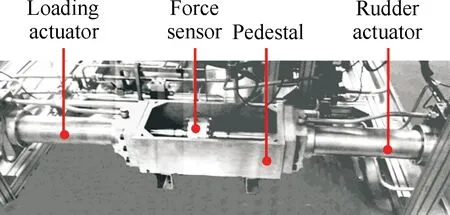
图10 试验台
Fig.10 Test rig
负载模拟器试验平台如图10所示,包括底座、左侧的负载模拟器和右侧舵面系统模拟器。两套系统之间安装力传感器(±300 kN),舵面系统模拟器作动器内安装有位移传感器(0~0.5 m)。伺服阀采用MOOG-G631-3006。采用两台恒压变量泵分别作为舵面系统模拟器和负载模拟器的油源。两套系统均设置了安全阀(31 MPa)来保证系统安全。两套系统位移和力由贝加莱CP1484 PLC编程控制。试验台还安装了温度传感器、压力传感器和转速传感器来完成系统工况监测以及一台工控机来记录测量数据以及人机交互控制。两套系统作动器完全一致,系统元件参数如表1所示,系统信号采样频率为1 kHz。
4.2 试验分析
为了验证控制效果的有效性,共进行5组试验,所得试验结果如图11~图15所示。
4.2.1 静态力跟踪多余力试验分析
在1 Hz、5 mm正弦位置干扰情况下,加载系统分别加载恒值50 000,0,-50 000 N的多余力测试曲线如图11所示。
图11 正弦位移干扰(1 Hz、 5 mm)下的多余力测试曲线
Fig.11 Test curves of surplus force under sine position disturbance (1 Hz, 5 mm)
从图11中可以看出,系统在0 N定值加载下,双向前馈补偿控制器和非线性最优前馈补偿控制器下的最大多余力分别为820 N和800 N;在50 000 N定值加载下,双向前馈补偿控制器和非线性最优前馈补偿控制器下的最大多余力分别为3 500 N和1 150 N;系统在-50 000 N定值加载下,双向前馈补偿控制器和非线性最优前馈补偿控制器下的最大多余力分别为5 800 N和1 050 N。试验结果表明,当系统力发生较大变化时,非线性最优补偿控制器均能够使多余力大幅消减,但双向前馈补偿控制器则只能在设计值附近完成有效补偿。
4.2.2 动态加载跟踪试验分析
在0.5 Hz、10 mm正弦位置干扰情况和1 Hz、5 mm正弦位置干扰情况下,0.5 Hz、50 000 N 力的正弦加载跟踪曲线分别如图12(a)和图12(b)所示。

图12 不同情况下正弦加载(0.5 Hz、 50 000 N)的试验结果
Fig.12 Test results under sine loading (0.5 Hz, 50 000 N) of different cases
从图12(a)中可以看出,在低频响大位移干扰加载工况下,双向补偿控制器的最大多余力达到了9 200 N,非线性最优补偿控制器正反向的最大多余力仅为3 650 N。从图12(b)中可以看出,在高频响小位移干扰加载工况下,双向补偿控制器的最大多余力达到了13 000 N,而非线性最优补偿控制器的最大多余力仅为5 450 N;在两种工作条件下,非线性最优补偿控制器相比于双向补偿控制效果多余力消除效果分别提高了60.3% 和58.1%。
在变幅值0.5 Hz正弦位置干扰情况下,5 000 N/mm 梯度力加载跟踪曲线如图13所示。
从图13中可以看出,在变加载过程中,双向补偿控制器的最大多余力达到了11 000 N,非线性最优补偿控制器正反向的最大多余力仅为 5 200 N。非线性最优补偿控制器相比于双向补偿控制效果多余力消除效果在幅值增大时较为明显,幅值最大时多余力抑制效果提高了52.7%。
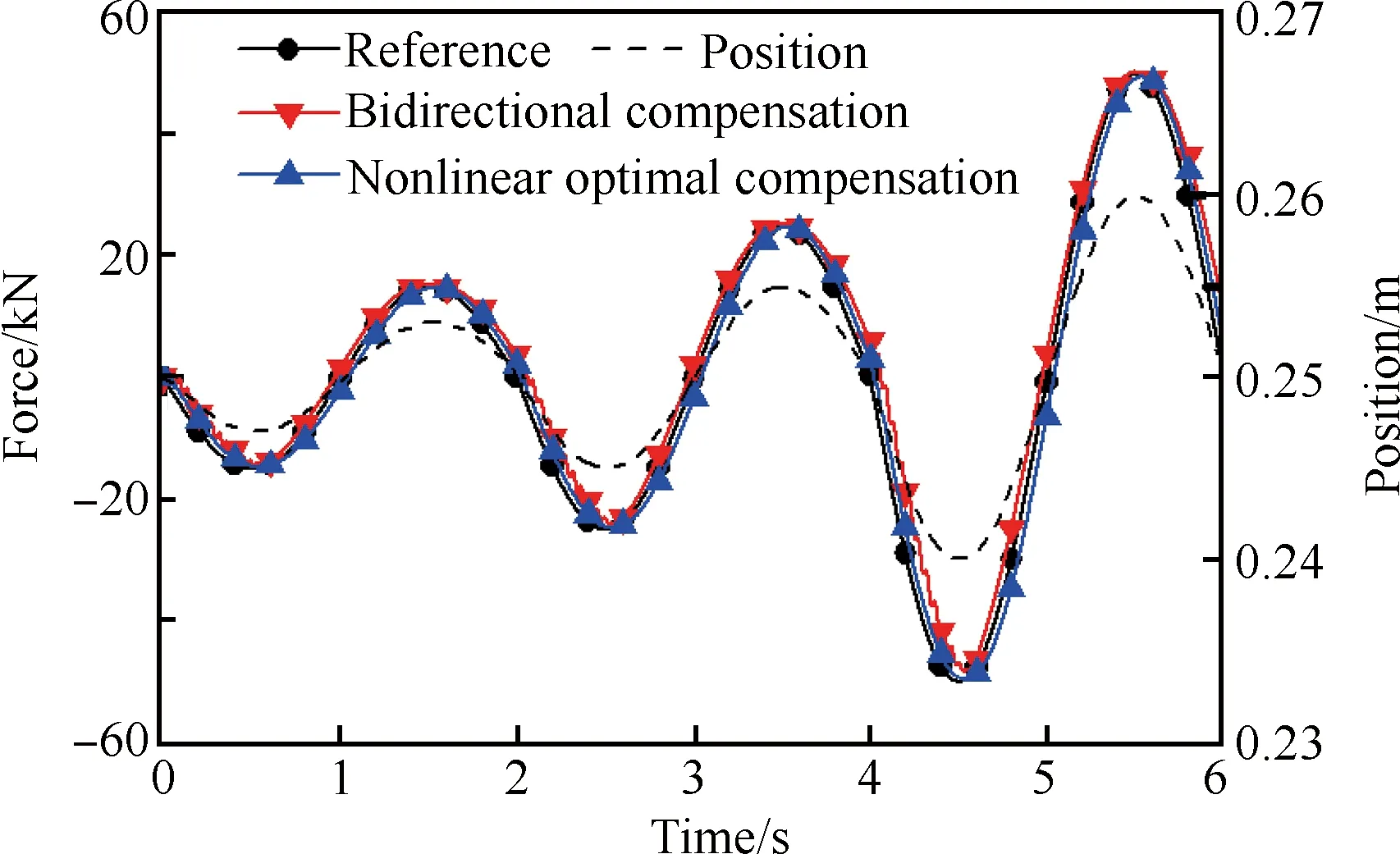
图13 变幅值正弦干扰下5 000 N/mm加载梯度试验曲线
Fig.13 Test curves under variable amplitude position disturbance and 5 000 N/mm loading gradient
4.2.3 试验与仿真对比分析
在不同正弦位置干扰情况下,0.5 Hz、50 000 N 正弦加载仿真和试验对比曲线如图14所示。变幅值正弦位置干扰、定加载梯度仿真和试验对比曲线如图15所示。

图14 正弦加载(0.5 Hz、 50 000 N)仿真试验对比
Fig.14 Comparison between simulation and test results under sine loading (0.5 Hz, 50 000 N)
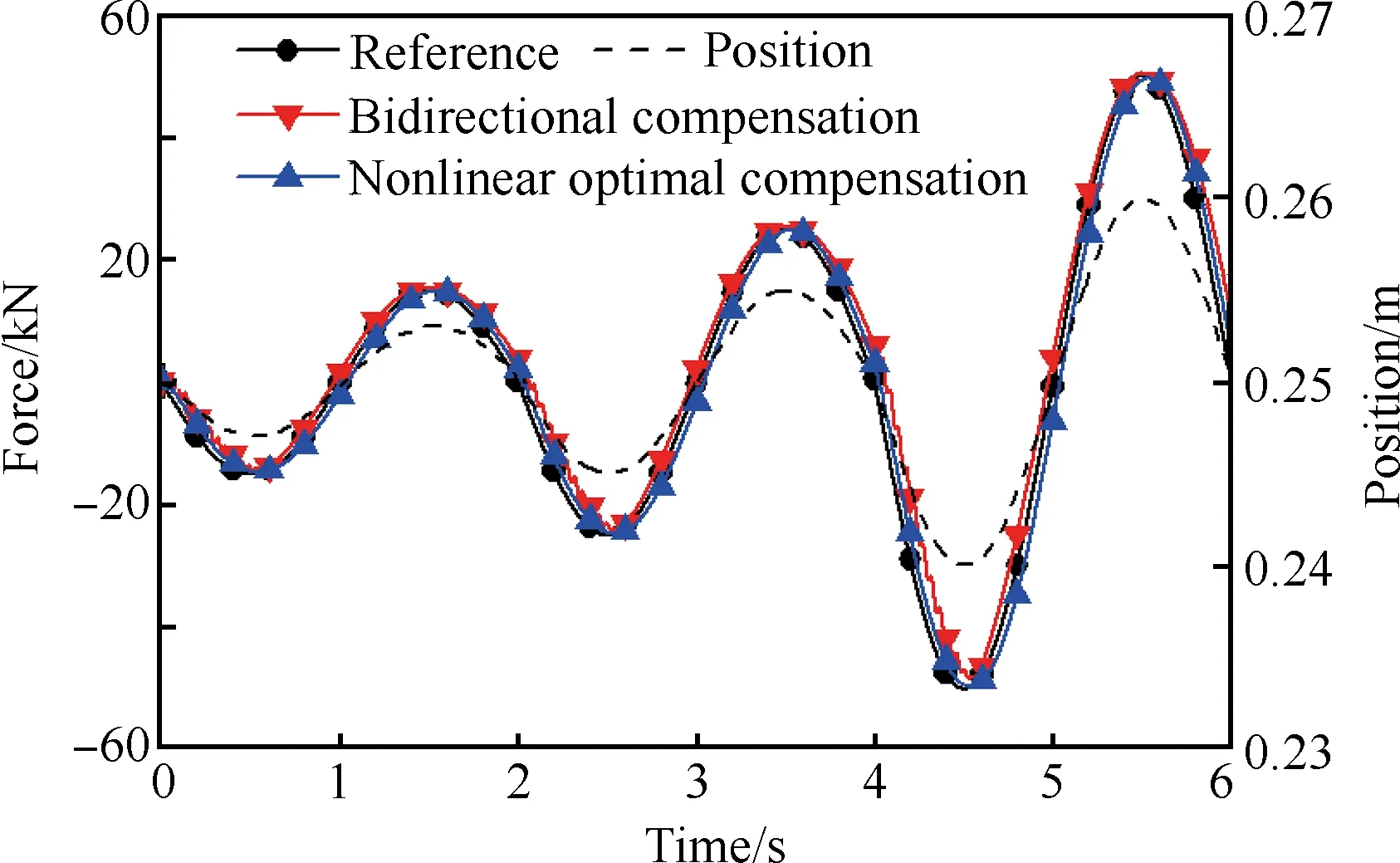
图15 变幅值正弦干扰下5 000 N/mm加载梯度仿真试验对比
Fig.15 Comparison between simulation and test results under variable amplitude position disturbance and 5 000 N/mm loading gradient
从图14和图15中可以看出,试验结果相较于仿真结果,跟踪误差略微提高,主要是因为试验中存在噪声干扰和供油压力变动等因素。仿真和试验结果都证明了非线性最优补偿控制对于重载航空负载模拟器的有效性。
5 结 论
1) 针对重载航空负载模拟器进行了研究,建立了系统的非线性数学模型,分析了多余力产生的原因,指出了双向前馈补偿控制器应用于重载航空负载模拟器失效的原因是流量增益在非对称缸正反向运动和大载荷变化情况下发生非线性变化。
2) 分析了参数不确定性和运动过程多余力干扰系数动态变化存在的原因,并指出了这两者会导致多余力大幅存在。
3) 非线性最优前馈补偿控制器在小扰动工况下,能够实时追踪系统的变化,做出最优的补偿。在非对称缸作为执行机构,大载荷动态变化的工况下,力跟踪效果较传统前馈补偿控制器提高50%以上。
[1] 杨华勇, 丁斐, 欧阳小平, 等. 大型客机液压能源系统[J]. 中国机械工程, 2009, 20(18): 2152-2159. YANG H Y, DING F, OUYANG X P, et al. Hydraulic power systems for trunk line aircrafts[J]. China Mechanical Engineering, 2009, 20(18): 2152-2159 (in Chinese).
[2] WANG C W, JIAO Z X, SHANG Y X, et al. Suppress surplus torque based on velocity closed-loop synchronization[C]//Proceedings of 2011 International Conference on Fluid Power and Mechatronics (FPM). Piscataway, NJ: IEEE Press, 2011: 435-439.
[3] WANG C W, JIAO Z X, WU S, et al. “Dual-loop control” of load simulator[C]//Proceedings of 2012 10th IEEE International Conference on Industrial Informatics (INDIN). Piscataway, NJ: IEEE Press, 2012: 530-535.
[4] AHN K K, TRUONG D Q, THANH T Q, et al. Online self-tuning fuzzy proportional-integral-derivative control for hydraulic load simulator[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2008, 222(2): 81-95.
[5] 华清. 电液负载模拟器关键技术的研究[D]. 北京: 北京航空航天大学, 2001. HUA Q. Studies on the key technology of electrohydraulic load simulator[D]. Beijing: Beijing University of Aeronautics and Astronautics, 2001 (in Chinese).
[6] YU C Y, LIU Q H, ZHAO K D. Velocity feedback in load simulator with a motor synchronizing in position[J]. Journal of Harbin Institute of Technology: New Series, 1998, 3(5): 78-81.
[7] 郝经佳. 双阀控制在电液负载仿真台中的应用[J]. 中国机械工程, 2002, 13(10): 814-816. HAO J J. Application of dual valve in electro hydraulic simulator[J]. China Mechanical Engineering, 2002, 13(10): 814-816 (in Chinese).
[8] NAM Y, HONG S K. Force control system design for aerodynamic load simulator[J]. Control Engineering Practice, 2002, 10(5): 549-558.
[9] NIKSEFAT N, SEPEHRI N. Design and experimental evaluation of a robust force controller for an electro-hydraulic actuator via quantitative feedback theory[J]. Control Engineering Practice, 2000, 8(12): 1335-1345.
[10] LI G Q, CAO J, ZHANG B, et al. Design of robust controller in electrohydraulic load simulator[C]//Proceedings of 2006 International Conference on Machine Learning and Cybernetics. Piscataway, NJ: IEEE Press, 2006: 779-784.
[11] YAO J Y, JIAO Z X, YAO B, et al. Nonlinear adaptive robust force control of hydraulic load simulator[J]. Chinese Journal of Aeronautics, 2012, 25(5): 766-775.
[12] WANG C W, JIAO Z X, WU S, et al. A practical nonlinear robust control approach of electro-hydraulic load simulator[J]. Chinese Journal of Aeronautics, 2014, 27(3): 735-744.
[13] TRUONG D Q, AHN K K. Force control for hydraulic load simulator using self-tuning grey predictor-fuzzy PID[J]. Mechatronics, 2009, 19(2): 233-246.
[14] TRUONG D Q, AHN K K, SOO K J, et al. Application of fuzzy-PID controller in hydraulic load simulator[C]//Proceedings of 2007 International Conference on Mechatronics and Automation. Piscataway, NJ: IEEE Press, 2007: 3338-3343.
[15] PARK Y J, LEE S Y, CHO H S. A genetic algorithm-based fuzzy control of an electro-hydraulic fin position servo system[C]//Fuzzy Systems Conference Proceedings. Piscataway, NJ: IEEE Press, 1999: 1361-1366.
[16] WANG X, WANG S, WANG X. Electrical load simulator based on velocity-loop compensation and improved fuzzy-PID[C]//Proceedings of International Symposium on Industrial Electronics. Piscataway, NJ: IEEE Press, 2009: 238-243.
[17] 王新民, 刘卫国. 电液伺服加载的神经网络内部反馈控制[J]. 航空学报, 2007, 28(3): 690-694. WANG X M, LIU W G. Neural-network internal feedback control for electro-hydraulic servo loading[J]. Acta Aeronautica et Astronautica Sinica, 2007, 28(3): 690-694 (in Chinese).
[18] 董传阳. 民机液压原理性验证系统研究[D]. 杭州: 浙江大学, 2014. DONG C Y. Research on the hydraulic test system of the civil aircraft[D]. Hangzhou: Zhejiang University, 2014 (in Chinese) .
[19] 汪成文, 焦宗夏, 罗才瑾. 基于改进的速度同步控制的电液负载模拟器[J]. 航空学报, 2012, 33(9): 1717-1725. WANG C W, JIAO Z X, LUO C J. An improved velocity synchronization control on electro-hydraulic load simulator[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(9): 1717-1725 (in Chinese).
[20] YAO J Y, JIAO Z X, SHANG Y X, et al. Adaptive nonlinear optimal compensation control for electro-hydraulic load simulator[J]. Chinese Journal of Aeronautics, 2010, 23(6): 720-733.
[21] 吴振顺. 液压控制系统[M]. 北京: 高等教育出版社, 2008: 39-47. WU Z S. Hydraulic control system[M]. Beijing: High Education Press, 2008: 39-47 (in Chinese).
[22] 卢长耿, 李金良. 液压控制系统的分析与设计[M]. 北京: 煤炭工业出版社, 1991: 121-124. LU C G, LI J L. Hydraulic control system[M]. Beijing: Coal Industry Press, 1991: 121-124 (in Chinese).
欧阳小平 男, 博士, 副教授, 硕士生导师。主要研究方向: 飞机液压、 电液控制以及外骨骼机器人。
Tel: 0571-87952274
E-mail: ouyangxp@zju.edu.cn
Received: 2015-06-11; Revised: 2015-07-09; Accepted: 2015-10-13; Published online: 2015-10-15 09:01
URL: www.cnki.net/kcms/detail/11.1929.V.20151015.0901.002.html
Foundation items: National Natural Science Foundation of China (51275450, 51521064); National Basic Research Program of China (2014CB046403)
*Corresponding author. Tel.: 0571-87952274 E-mail: ouyangxp@zju.edu.cn
Nonlinear optimal feedforward compensation controller forheavy load aviation load simulator
OUYANG Xiaoping1,*, LI Feng1, ZHU Ying2, YANG Shangbao2, YANG Huayong1
1.StateKeyLaboratoryofFluidPowerTransmissionandControl,ZhejiangUniversity,Hangzhou310027,China2.AviationKeyLaboratoryofScienceandTechnologyonAeroElectromechanicalSystemIntegration,Nanjing211100,China
Heavy load aviation load simulator is the ground simulation platform, which is used to simulate the real work load of the heavy-duty aircrafts such as C919 and Yun-20. A heavy-duty aviation load simulator is developed to achieve large load in limited space and the asymmetric cylinder is used as the actuator. In order to eliminate the influence of surplus force on the loading precision of the overloaded simulator, the influence of the bidirectional motions of the cylinder and the nonlinear flow gain coefficient of the servo valve for the feedforward compensation function are analyzed, and the nonlinear parameter estimation controller has been proposed. Meanwhile, the influence of dynamic parameters’ variation (such as acceleration) and static parameter error for eliminating the excessive force is analyzed, and the parameter optimal controller is developed. Both simulation and test results show that the performance of the developed feedforward compensation controller has been improved by more than 50% in the loading precision and the eliminating ability of the surplus force, compared to the traditional feedforward compensation controllers.
heavy load; load simulator; surplus force; nonlinear control; feedforward control
2015-06-11;退修日期:2015-07-09;录用日期:2015-10-13; < class="emphasis_bold">网络出版时间:
时间: 2015-10-15 09:01
www.cnki.net/kcms/detail/11.1929.V.20151015.0901.002.html
国家自然科学基金 (51275450, 51521064); 国家“973”计划 (2014CB046403)
.Tel.: 0571-87952274 E-mail: ouyangxp@zju.edu.cn
欧阳小平, 李锋, 朱莹, 等. 重载航空负载模拟器非线性最优前馈补偿控制[J]. 航空学报, 2016, 37(2): 669-679. OUYANG X P, LI F, ZHU Y, et al. Nonlinear optimal feedforward compensation controller for heavy load aviation load simulator[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(2): 669-679.
http://hkxb.buaa.edu.cn hkxb@buaa.edu.cn
10.7527/S1000-6893.2015.0277
V242
:A
: 1000-6893(2016)02-0669-11
*
猜你喜欢
装备环境工程(2022年9期)2022-10-13
新高考·高三数学(2022年3期)2022-04-28
汽车实用技术(2022年5期)2022-04-02
兵器装备工程学报(2021年12期)2022-01-11
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中学生数理化·高一版(2018年6期)2018-07-09
