一种改进型MPPT控制的光伏发电及其并网逆变器的研究
2016-02-21 06:06李文华范新涛贾玉雯
河北工业大学学报 2016年3期
李文华,范新涛,贾玉雯
(河北工业大学电气工程学院,天津300130)
一种改进型MPPT控制的光伏发电及其并网逆变器的研究
李文华,范新涛,贾玉雯
(河北工业大学电气工程学院,天津300130)
光伏电池输出特性曲线方程是光伏发电理论研究的基础,首先建立光伏电池工程用数学模型,然后为了能够更有效地提高光伏发电系统的最大输出功率,在传统电导增量法的基础上提出了一种改进型的MPPT算法,经过验证此方法不仅能够有效提高跟踪速度和精度,而且可以较好的抑制系统在最大功率处的波动.并网的光伏发电系统,由公网系统提供电压支撑,所以可以采用P-Q控制方式的逆变器使其输出恒定的有功和无功功率.整个控制系统包括3个环节,分别是MPPT环、并网逆变器的电压外环和电流内环,MPPT环可与电压外环和电流内环相互独立,即升压电路与逆变电路分别由2个控制器独立完成.
光伏电池;MPPT算法;并网逆变器;P-Q控制
0 引言
近年来随着能源危机和环境污染的日益严重,开发利用清洁能源已经成为世界各国可持续发展的重要战略之一.太阳能是取之不尽、用之不竭的清洁能源,开发利用太阳能尤其是利用光伏发电具有十分重要的意义.光伏电池输出特性曲线方程是光伏发电理论研究的基础,目前光伏电池的模型有基于等效电路的指数模型及基于大量实验数据拟合的多项式模型.由于光伏电池单元内部含有P-N结,其中指数模型能很好的反应其内部结构,精度较高[1-2],所以本文是基于此类模型的研究.
光伏电池的输出电压和电流会随着光照强度和环境温度的变化表现出较强的非线性,为了提高光伏发电系统的效率,最大功率跟踪控制(MPPT)是光伏发电系统必不可少的环节.目前针对最大功率跟踪控制的方法有很多,比如恒定电压法、扰动观测法、电导增量法、智能算法等[3-6].但这些方法有的在跟踪速度和跟踪精度之间存在矛盾,在步长较大时有可能在最大功率点附近波动,加大功率损耗;有的计算算法复杂,不利于计算.为了解决上述问题,本文在传统电导增量的基础上提出一种新型变步长电导增量法,此方法能够有效提高系统的跟踪速度和精度及抑制在最大功率处的波动.
外界环境变化时会导致Boost电路输出侧直流电压变化,光伏发电逆变并网需确保直流侧电压稳定,另外逆变器并网运行的功率因数应该为1[7].为了满足光伏并网要求本文做了相应的研究.
1 光伏电池数学模型
为了分析光伏电池的外特性,通常将光伏电池与负载用如图1所示的等效电路来模拟[1].
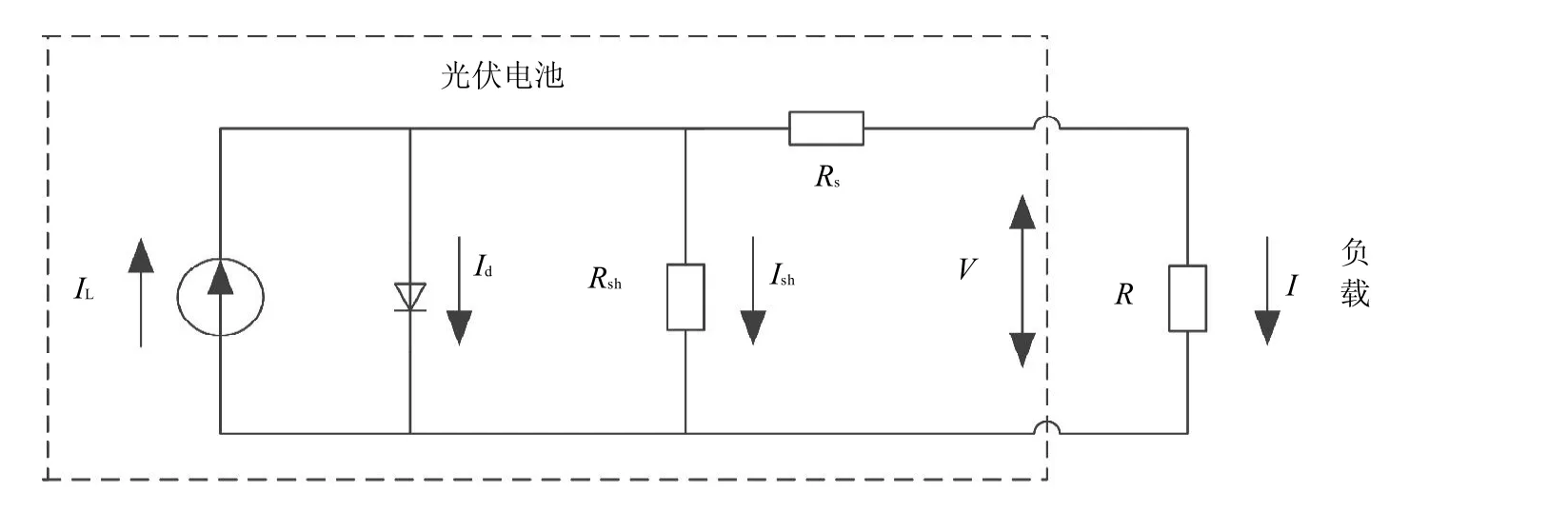
图1 光伏电池等效电路Fig.1 Equivalentcircuitof the solar cell
由此可以得到光伏电池的I-V特性曲线方程为
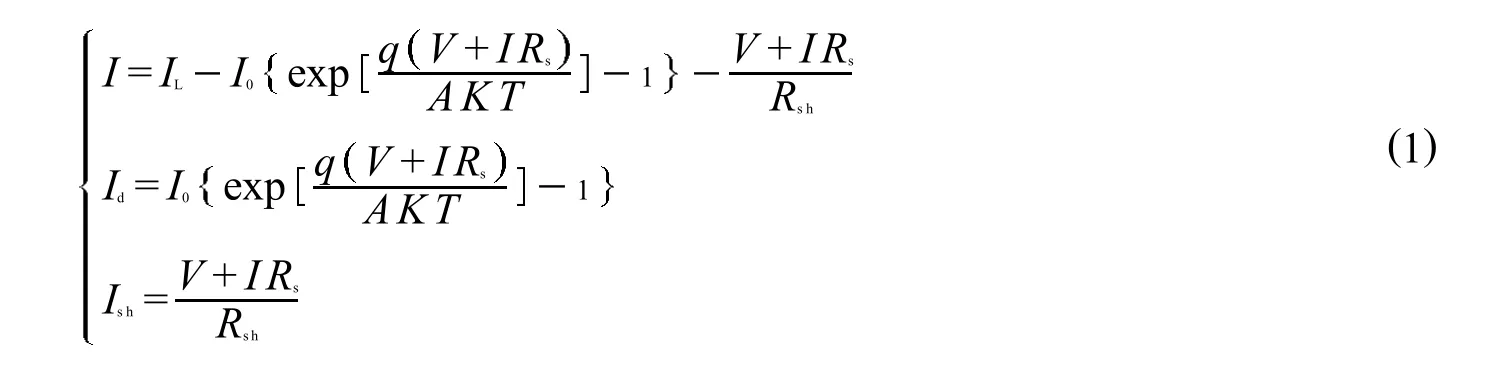
式中:IL为光电流,当光伏电池工作时,其光电流不随工作状态而改变,大小为光伏电池的短路电流;I0为反向饱和电流;q为电子电荷;K为玻尔兹曼常数;T为绝对温度;A为二极管因子;Rs为串联电阻;Rsh为并联电阻.
在式(1)的基础上推导出比较实用的工程用数学模型如式(2)
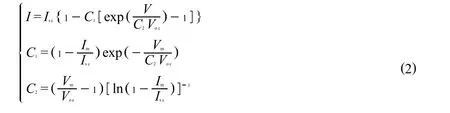
在任意环境条件下,Isc、Voc、Im和Vm会按一定规律发生变化;通过引入相应的补偿系数,近似推算出任意光照S和电池温度T下4个技术参数如式(3)
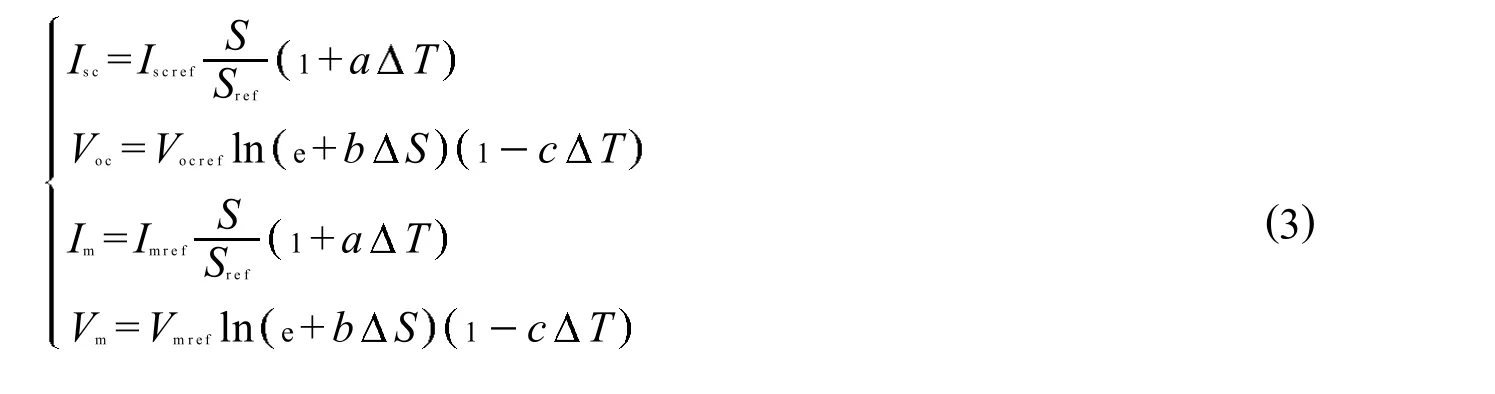
式中:Sref=1 000W/m2为参考太阳辐射强度;Tref=25℃为参考电池温度;S=S/Sref1为实际光强与参考光强的差值;T=T Tref为实际电池温度与参考电池温度的差值;e为自然对数的底数;a、b、c为补偿系数.通常a=0.002 5;b=0.5;c=0.002 88;Iscref、Vocref、Imref、Vmref由生产厂家给定.由此数学模型可得环境温度为25℃,光照强度分别为1000、800、600W/m2时的P-V(有功-电压)曲线,如图2a);及光照强度为1000W/m2,温度分别为25℃、50℃、75℃时的P-V(有功-电压)曲线,如图2b).
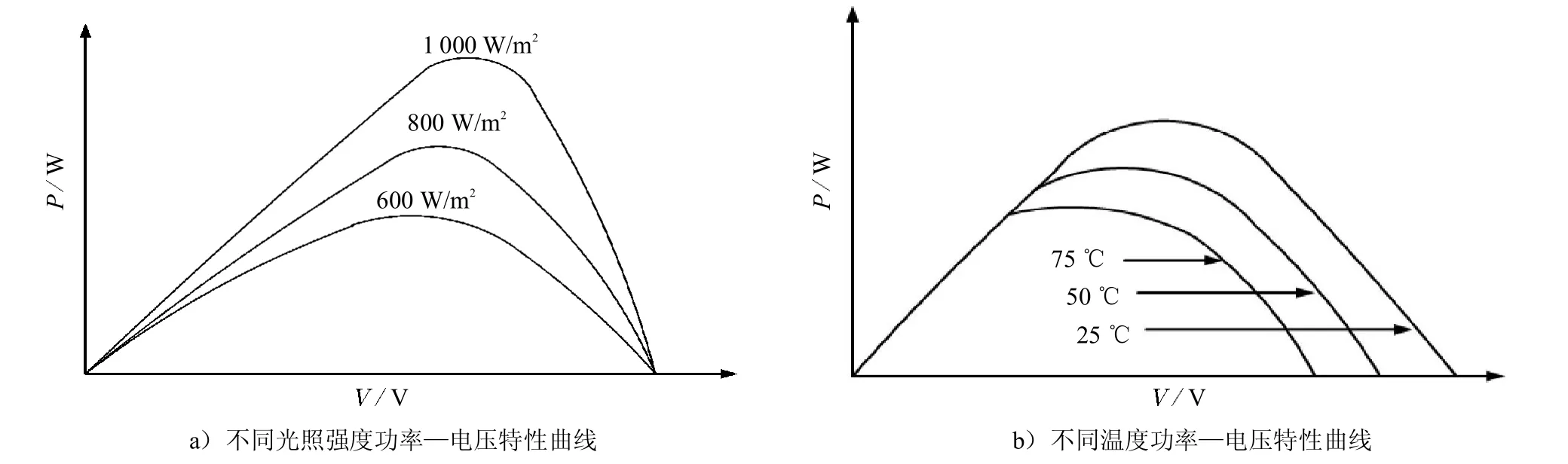
图2 不同温度、不同光照强度光伏电池输出特性Fig.2 Theoutputcharacteristicsof photovoltaic cellswith different temperaturesand differentillum ination intensities
2 改进型MPPT算法
根据以上分析及图2可知,当d P/d V=0时系统工作在最大功率点处;当d P/d V>0时系统工作在最大功率左侧可以通过增大步长搜寻最大功率;当d P/d V<0时系统工作在最大功率右侧可以通过减小步长搜寻最大功率[8].则电导增量法的判断依据

当光伏电池工作在最大功率时,功率对电压导数为0,即

大多数实际应用中,最大功率跟踪是通过在光伏阵列和负载之间连接的阻抗匹配转换器来完成.可以通过控制占空比D自动调整步长.
假设V k、I k是光伏阵列在时刻k的输出电压和电流,D k表示在k时刻的占空比,则步长更新规则为

其中Sp为扰动定步长,可以根据要求适当设置.

其中m为一常数,由光伏阵列的输出特性来决定.具体最大功率跟踪算法流程图如图3.
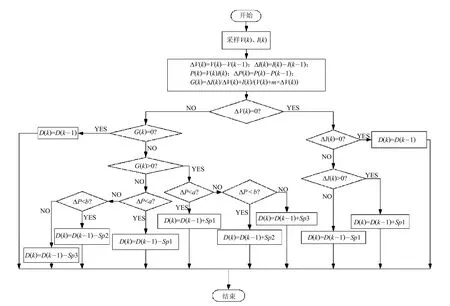
图3 新型最大功率跟踪算法流程图Fig.3 New maximum power tracking algorithm flow chart
设定初始环境状态为温度25℃、光照强度为1 000W/m2,光伏电池组件参数Iscref=4.2 A、Vocref=21 V、Imref=3.5 A、Vmref=17 V,保持光强不变,t=0.1 s时,外界环境温度升高至T1=50℃;t=0.2 s时,外界温度降低为T2=15℃;然后保持环境温度为T2=15℃不变,t=0.3 s时,光强增加为S1=1 200W/m2;t=0.4 s时,光强减弱为S2=900W/m2.定步长电导增量法和改进型变步长电导增量法的仿真图分别为图4和图5.
比较2幅图可知定步长电导增量法取Sp=0.01时,系统在0.05 s即达到最大功率,但是会在最大功点处产生明显震荡,加大了功率损耗.改进型变步长电导增量法取Sp3=0.01、Sp2=0.001、Sp1=0.000 5;a= 0.025、b=0.1时,跟踪速度虽然有所降低在0.07 s处系统才达到最大功率,但是由于步长越靠近最大功率处越小,所以可以有效抑制在最大功率处震荡,提高跟踪精度.同样改进型变步长电导增量在以后的环境变化时跟踪速度与跟踪精度都有所改善.另外由图4、图5可知,当温度上升时,最大功率Pm有所减少,而当温度降低时,Pm上升;由于温度变化量有限,其功率波动不大.当光照强度增强时,Pm明显增加;而当光照强度减弱时Pm会大幅下跌,转化过程中会出现一定振荡;光照强度的骤增骤减对最大输出功率有较大的影响.
光伏阵列在部分阴影遮挡下存在局部最大功率点,且局部最大功率点的个数和分布随着遮挡条件的变化而变化.使用传统的MPPT追踪算法,只能追踪至局部最大功率点,无法找到全局MPP(最大功率点).因此,需要研究新的可靠且迅速的针对多峰MPPT的控制方法.另一方面讲,即使采用有效的多峰MPPT控制算法使得光伏阵列工作于全局最大功率点处,但是由于该工作点不是每个组件的MPP,因此阵列向外输出的功率会有很大的降低[10].
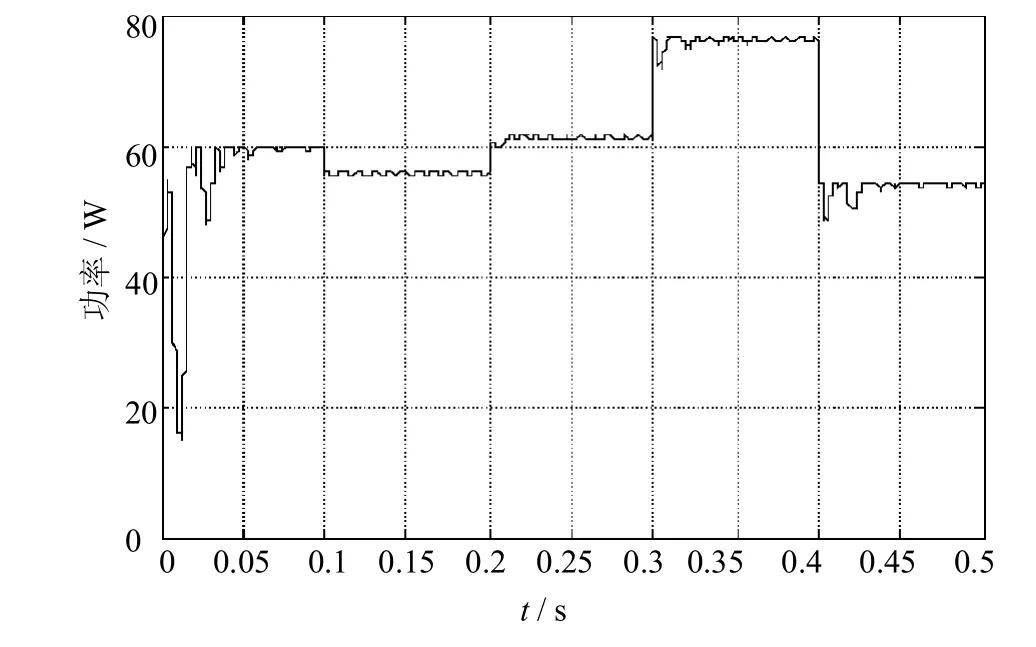
图4 定步长电导增量法输出功率Fig.4 Fixed step conductance incrementmethod
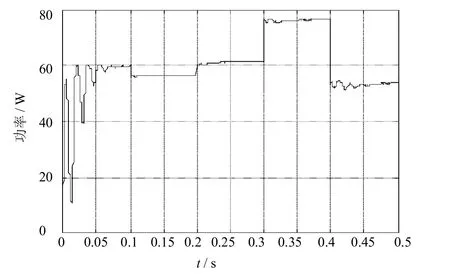
图5 改进型变步长电导增量法输出功率Fig.5 Modified variable step incrementalconductance increment
为了最大限度的解决部分阴影遮挡条件所造成的组件失配对整个光伏发电系统造成的不利影响,提高系统的整体效率,最有效的方法是采用分布式控制方式.通过对尽可能小的组件集合分别进行MPPT控制,即分布式MPPT[11].目前分布式MPPT大致分为组串式MPPT及组件式MPPT 2大类.组串式无法从根本上解决上述问题,所以组件式是最好的选择.组件式MPPT是指为每一个光伏组件都配备一个微型功率变流器,以改变其输出特性,使其始终工作在最大功率点上,再将这种复合单元进行串、并联连接,就可以构成一个高效率的光伏发电阵列,可以解决上述问题.具体结构图如图6所示.
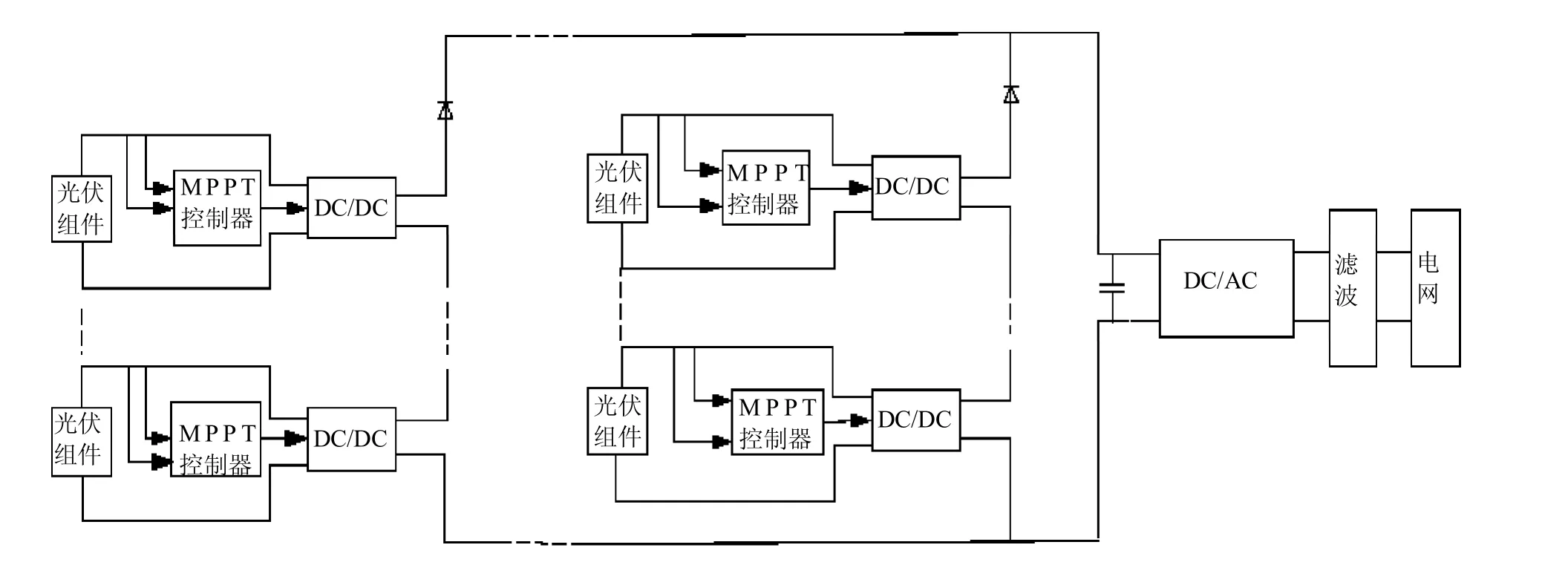
图6 组件式MPPT发电系统Fig.6 ComponentMPPT powergeneration system
3 光伏并网逆变器的研究
光伏并网逆变器,典型的控制策略是通过对逆变器输出电流矢量的控制来实现并网及有功、无功的控制,其中基于电网电压定向的矢量控制最为常用[12-13].首先通过电压传感器、电流传感器,分别采集电网电压a、b、c和逆变器输出的电流a、b、c,然后根据式(8)和式(9)进行Clark、Park坐标变换.
Clark变换

Park变换

其中一般取A相的相角.
根据上述坐标变换,以d轴为有功轴,将该三相交流电压、三相交流电流分别变换至两相旋转坐标系下的电压矢量gd、gq和电流矢量d、q,最后在两相旋转坐标系下,分别实现对有功和无功的控制.式(10)为旋转坐标系下并网的数学模型.


则


一般来说,d轴有功量要确保逆变器直流电压稳定,通常采用双闭环控制策略,外环控制直流电压,将直流电压期望值Vd*c和实际值Vdc做差后通过PI控制器输出,输出的值作为d轴电流环的期望值*d,如式(12)所示该期望值与坐标变换后的d轴电流矢量d做差,通过PI控制器输出,参与最终的开关管脉冲计算,确保直流电压稳定和有功功率输出;q轴无功轴采用单闭环控制策略,通常逆变器的运行功率因数为1,因此无功电流期望值*q为0,该期望值与坐标变换后的q轴电流矢量q做差,通过PI控制器输出.d轴和q轴电流环的输出与坐标变换后的前馈量进行交叉解耦,解耦后的d、q轴电压d、q经过Park反变换输出、、、经过空间矢量脉宽调制法(SVPWM)计算出并网变流器开关器件的开关状态,控制变流器的输出[14-16].其中Park反变换为

其中双闭环PI调节子模块图如图7所示.
4 仿真结果分析
为了验证控制策略的正确性,本文在Matlab/Simulink的仿真平台上搭建仿真模型.输出图分别为图8交流侧输出A相电压、电流波形,图9直流侧电压波形.其中在0.4 s时光照强度从500W/m2增加到1000W/m2,光伏阵列参数Iscref=213 A、Iocref=370V、Imref=200 A、Imref=350 V.
由图8系统输出电压、电流波形,可知锁相环节经过3个周期使电流与电压保持同步,保证逆变器输出功率因数为1,由于0.4 s时光照强度增加,所以电流幅值随着增加,使输出功率增大.由图9所示当光照强度变化时,直流侧电压经过短暂的波动,然后保持原来的值恒定.由此说明本文采用电压外环电流内环的双闭环控制策略能够有效控制直流侧电压稳定及输出功率因数为1,具有良好的动态和稳态性能,满足P-Q并网条件.
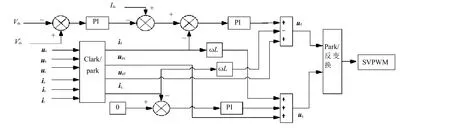
图7 双闭环PI调节子模块图Fig.7 Double closed loop PIregulator submodule diagram
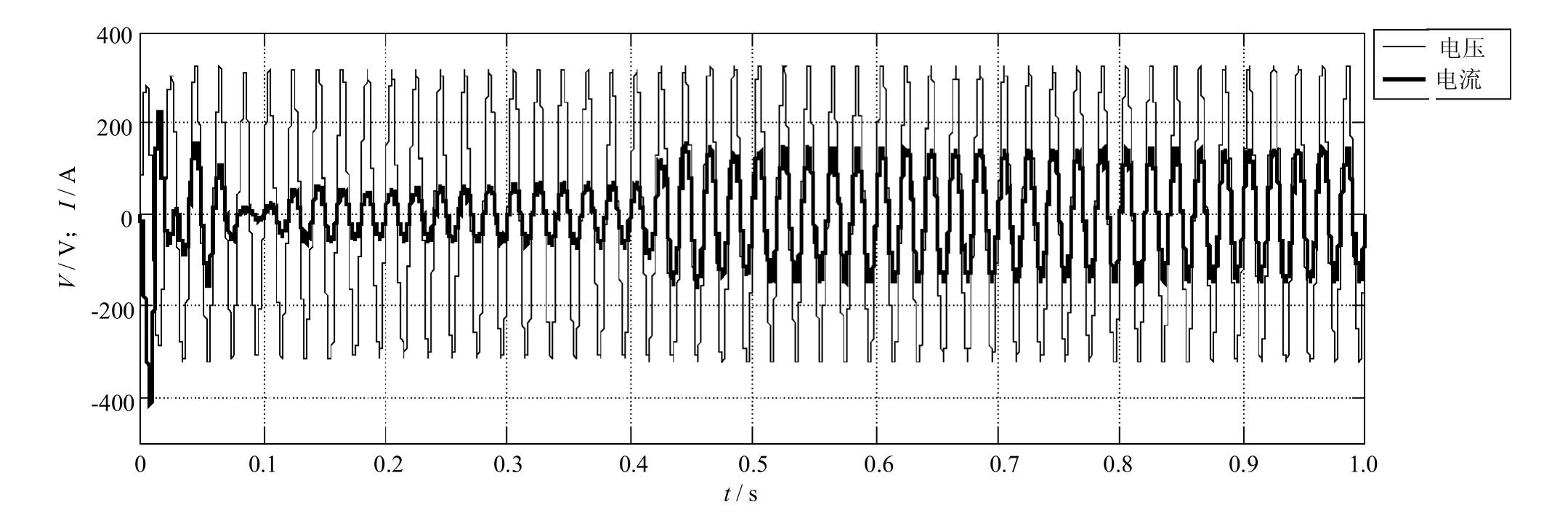
图8 交流侧输出A相电压电流波形Fig.8 Aphase voltage and currentwaveform of the AC side
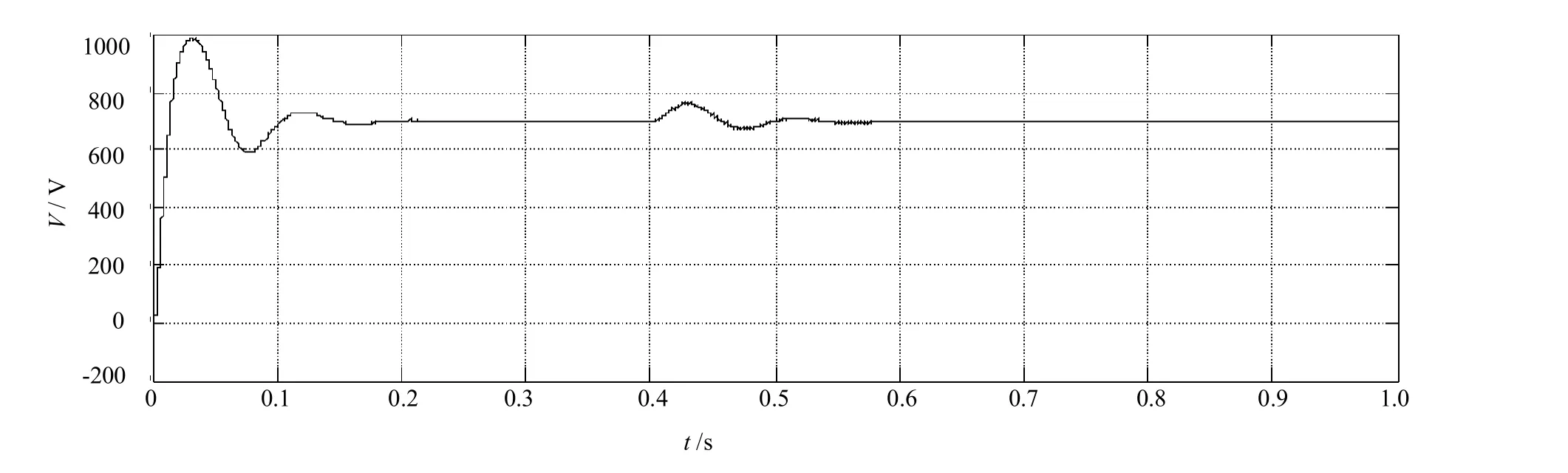
图9 直流侧电压波形Fig.9 Voltagewaveform of the DC side
5 结论
光伏电池数学模型的建立是研究光伏发电的基础,为了更好的反应光伏电池的内部结构,本文建立了精度较高的基于等效电路的光伏电池指数模型.光伏电池的输出电压和电流会随着光照强度和环境温度的变化表现出较强的非线性,为了提高光伏发电系统的效率,本文针对传统的最大功率跟踪算法在跟踪速度和跟踪精度之间存在矛盾及在最大功率处波动的缺陷,提出了一种新型的变步长电导增量法,另外为了最大限度的解决部分阴影遮挡条件所造成的组件失配对整个光伏发电系统造成的不利影响,采用组件式的分布式最大功率跟踪算法,最后通过仿真验证本文所提方法不仅能够提高跟踪速度和跟踪精度,而且能够有效抑制了在最大功率处波动.针对光伏电池逆变并网,本文采用电压外环电流内环的双闭环并网控制策略,通过仿真验证此方法能够维持直流侧电压恒定以及使系统以功率因数为1运行,满足并网条件.
[1]傅望,周林,郭珂,等.光伏电池工程用数学模型研究[J].电工技术学报,2011,26(10):211-216.
[2]杨永恒,周克亮.光伏电池建模及MPPT控制策略[J].电工技术学报,2011,26(S1):229-234.
[3]胥芳,张任,吴乐彬,等.自适应BP神经网络在光伏MPPT中的应用[J].太阳能学报,2012,38(06):468-472.
[4]丁爱华,卢子广,卢泉,等.基于改进PSO的复杂环境下光伏MPPT控制[J].太阳能学报,2015,36(2):408-413.
[5]NabulsiA,Ahmad,Dhaouadi,etal.Efficiency optim ization of a dsp-based stand alone PV system using fuzzy logic and dual-MPPT control[J].IEEE Transactionson Industrial Informatics,2012,8(3):573-584.
[6]杭凤海,杨伟,朱文艳.光伏系统MPPT的扰动观测法分析与改进[J].电力系统保护与控制,2014,42(9):110-114.
[7]黄天富,石新春,魏德冰,等.基于电流无差拍控制的三相光伏并网逆变器的研究[J].电力系统保护与控制,2012,40(11):36-41.
[8]周东宝,陈渊睿.基于改进型变步长电导增量法的最大功率点跟踪策略[J].电网技术,2015,39(6):1491-1498.
[9]高金辉,唐静.一种新型光伏系统最大功率跟踪算法的研究[J].电力系统保护与控制,2011,39(23):21-24,29.
[10]金新民.主动配电网中的电力电子技术[M].北京:北京交通大学出版社,2015,79-80.
[11]孙航,杜海江,季迎旭,等.光伏分布式MPPT机理分析与仿真研究[J].电力系统保护与控制,2015,43(2):48-54.
[12]吴国祥,杨勇.三相光伏并网逆变器dq旋转坐标系下无差拍功率控制[J].电机与控制学报,2014,18(12):37-43.
[13]陈树勇,鲍海,吴春洋,等.分布式光伏发电并网功率直接控制方法[J].中国电机工程学报,2011,31(10):6-11.
[14]Liming Liu,ABB Inc,Raleigh,et al.Decoupled active and reactive power control for large-scale grid-connected photovoltaic systems using cascadedmodularmultilevelconverters[J].IEEE Transactionson Power Electronics,2014,30(1):176-187.
[15]周德佳,赵争鸣,袁立强,等.具有改进最大功率跟踪算法的光伏并网控制系统及其实现[J].中国电机工程学报,2008,28(31):94-100.
[16]苗淼,李兴源,王曦.改进的三相光伏并网谐振电流控制策略[J].太阳能学报,2014,35(6):985-991.
[责任编辑 代俊秋]
Research on an improved MPPT control for photovoltaic power generation and grid connected inverter
LIWenhua,FAN Xintao,JIA Yuwen
(Schoolof Electrical Engineering,HebeiUniversity of Technology,Tianjin 300130,China)
The outputcharacteristic curve equation of photovoltaic cells is the basis of the theoretical research of photovoltaic powergeneration.So we firstly establish themathematicalmodelof photovoltaic cellengineering,and then in order to improve themaximum outputpowerofphotovoltaic powergeneration system effectively in theestablishedmodel, the MPPT algorithm improved based on the traditional conductance incrementmethod is proposed,which can notonly improve the tracking speed and precision,butalso can suppressthe fluctuationof thesystem atthemaximum powerpoint. Grid connected photovoltaic power generation system,the public network systems to provide voltage supportso that it can be used in the P-Q controlmode of the inverter tomake its output constantactive and reactive power.The whole controlsystem consistsof three parts,namely,theMPPT loop,the voltage outer loop and the currentinner loop of the grid connected inverter,TheMPPT loop isindependentof thevoltageouter loop and currentinner loop,thatis,theboost circuitand the inverter circuitare completed by two controllers.
photovoltaic cell;MPPT algorithm;grid connected inverter;P-Q control
M 743
A
1007-2373(2016)03-0001-08
10.14081/j.cnki.hgdxb.2016.03.001
2015-10-19
国家自然科学基金(51377044)
李文华(1973-),男(汉族),博士,教授.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
健康护理(2022年3期)2022-05-26
当代陕西(2022年6期)2022-04-19
成都信息工程大学学报(2021年5期)2021-12-30
当代水产(2021年8期)2021-11-04
中国惯性技术学报(2020年2期)2020-07-24
中学生数理化·中考版(2019年9期)2019-11-25
成都信息工程大学学报(2019年2期)2019-08-28
电子制作(2018年14期)2018-08-21
北京航空航天大学学报(2016年12期)2016-02-27