
基于改进Hough变换的ASAR图像船只尾迹检测算法研究
2016-02-15 08:53王海涛席沛丽侯雨生路瑞峰
上海航天 2016年6期
巩 彪,王海涛,席沛丽,侯雨生,路瑞峰
(上海卫星工程研究所,上海 201109)
基于改进Hough变换的ASAR图像船只尾迹检测算法研究
巩 彪,王海涛,席沛丽,侯雨生,路瑞峰
(上海卫星工程研究所,上海 201109)
为能更准确地对先进合成孔径雷达(ASAR)图像中船只尾迹进行探测,提出了一种基于改进Hough变换的船只尾迹检测算法。切割ASAR窗口图像,以尾迹为中心、略小于尾迹长度为高度,确定含船只目标及其尾迹的窗口,将船只用窗口图像灰度均值替代以使其不影响尾迹检测。用改进Hough算法,先后对亮尾迹和暗尾迹进行检测,在变换域中由设定的阈值寻找峰值,反演出尾迹所在直线,再由阈值条件确定尾迹的起点和终点。给出了用于ASAR图像船只尾迹检测算法的流程。对两幅含船只尾迹的ASAR图像进行了检测,结果表明:与传统算法相比,该算法运算简单,实现速度快,能较准确地检测到船只尾迹及其起点和终点。
合成孔径雷达; 先进合成孔径雷达图像; 船只尾迹; 检测; Hough变换; 船只掩膜; 阈值; 约束条件
0 引言
与岸基、船载、机载等探测方式相比,星载合成孔径雷达(SAR)探测有全天时、全天候、远距离、大范围等优点,能宏观、长期、动态地对陆地和海洋实施观测。因特殊的成像原理能提供高分辨率的遥感图像, SAR被广泛用于军事侦察和目标检测等领域[1]。水面的运动船只或水下的运动物体在水面留下的痕迹被称为尾迹,光学图像和SAR图像上常能发现这种尾迹。自1978年在美国Seasat SAR卫星的SAR图像上首次观测到船只尾迹以来,利用船只尾迹雷达特征信号作为一种船只检测和分类方式受到广泛关注[2]。船只尾迹的SAR图像检测已成为研究热点,研究成果有广泛的应用前景,如对特定海域、海湾港口的尾迹进行检测;对海洋水运交通、非法捕鱼、海上走私活动等进行监测和管理等[2-3]。目前,国内外研发了众多的星载SAR、机载SAR,获得了丰富的SAR图像数据[2]。当海量的SAR图像用于船只尾迹检测时,为能及时有效发现和提取船只尾迹信息,迫切需要对尾迹检测进行研究。近年来,在SAR图像尾迹检测进行了大量研究,主要是基于Radon变换和Hough变换[4-7]。直接利用Radon变换方法重构出的图像,虽然能看出尾迹,但其贯穿了整幅图像,无法判断航迹的起点和终点,缺点非常明显,故只用于粗略的线状特征的检测。基于Hough变换算法,多是先将灰度图像二值化再进行检测[7-10]。但对SAR图像来说,船只尾迹可能亮于SAR图像背景,也可能暗于背景,因此二值化的阈值常难以确定。基于改进的Hough变换的效果虽较前两种算法有改善,但对多幅SAR图像的实验研究表明,多数情况下只适于单尾迹的检测,且无法自动识别尾迹的类型。为此,本文对原算法进行改进:检测出船只并将船只部分用图像灰度均值代替,用阈值修正变换域中的峰值检测;修正了尾迹起点和终点的约束条件。
1 船只尾迹类型
常见的船只尾迹一般可分为窄V形尾迹、Kelvin尾迹和湍流尾迹三类[10-12]。窄V形尾迹和Kelvin尾迹是由船体对水面的扰动直接产生的,湍流尾迹是由船体排水和螺旋桨扰动造成的[13]。尾迹波模式组成分量几何关系如图1所示。图中:开尔文包络即为Kelvin尾迹。由图1可知:窄V形尾迹、Kelvin尾迹和湍流尾迹均有明显的线状特性,对尾迹的检测正是基于此特性的。
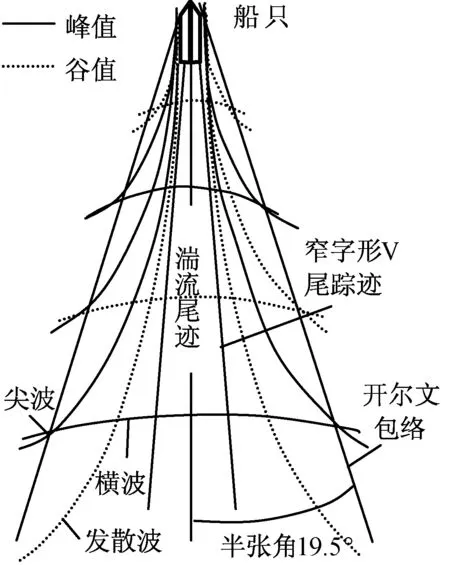
图1 船只波模式Fig.1 Structure of ship wave
2 用于ASAR图像船只尾迹检测算法
2.1 Hough变换算法改进
Hough变换是1962年HOUGH在其专利中引入,用于检测图像中的直线[1、3、14]。它在图像处理和计算机视觉中有多种应用,如直线检测、圆或椭圆检测和边界提取等。二维欧几里得空间中Hough变换的定义为
f(θ,ρ)=H{F}=

(1)
式中:D为整个(x,y)平面;(x,y)为以图像中心为坐标的二维欧式平面;F(x,y)为图像上点(x,y)的灰度值;δ为Dirac函数;ρ为由原点至直线的法线距离;θ为直线的法线与x轴的夹角,取值范围0°~180°。
改进的Hough变换算法可描述如下[15-18]。
a)参数空间中设定2个灰度累加器H1(ρk,θm),H2(ρk,θm)和2个直线长度统计累加器L1(ρk,θm),L2(ρk,θm),分别用于对亮尾迹和暗尾迹进行积分。此处:k,m分别为参数空间中横轴和纵轴的个数。
b)参数空间中,先对亮尾迹进行检测,累加每个像素的灰度值到H1(ρk,θm)并使L1(ρk,θm)加1,再在Hough变换域中搜索H1(ρk,θm)/L1(ρk,θm)的最大值,保存搜索结果,然后根据阈值判断是否继续搜索。
c)对暗尾迹进行检测,累加每个像素的灰度值到H2(ρk,θm)并使L2(ρk,θm)加1,再在Hough变换域中搜索当H2(ρk,θm)/L2(ρk,θm)小于均值时的最大值,保存搜索结果,然后根据阈值判断是否继续搜索。若H2(ρk,θm)/L2(ρk,,θm)为0,则直接退出搜索。
d)参数空间中搜索峰值或谷值的前提条件是
L1(ρk,θm)或L2(ρk,θm)大于M。此处:M为含有尾迹的SAR图像局部窗口中高度的一半。该限定条件作用是剔除局部高灰度值对检测结果的影响。
e)根据检测出的亮尾迹或暗尾迹,用均值判别法及阈值法反演出尾迹端点坐标。
2.2 用于ASAR图像船只尾迹检测算法
常用的尾迹检测算法利用上述特性,式(1)中的F(x,y)为图像上点(x,y)的灰度值,变换后θ-ρ平面值f(θ,ρ)变为点(θ,ρ)对应的(x,y)平面的几何直线上所有像素点的灰度累计值。但图像上位于不同位置直线的像素点数各异,使在图像中的直线对Hough变换空间的贡献不均匀(即累加数目不同),且加上海面背景相干斑噪声的严重影响,经常导致检测结果不准确。
另一方面,传统算法都只涉及检测,未对尾迹的起始点进行确定,且没有对数据格式复杂的ASAR图像进行尾迹检测。因此,针对Hough变换算法的不足,本文提出了一种基于改进的Hough变换船只尾迹检测算法,可快速检测出尾迹的起始点,并在ASAR图像中实现,流程如图2所示,具体措施如下。
a)对ASAR窗口图像的切割,以尾迹为中心,以略小于尾迹长度为高度,确定含有船只目标及其尾迹的图像窗口。
b)将船只用窗口图像灰度均值代替。
c)对该图像窗口采用本文的改进算法,在变换域中通过设定阈值寻找峰值。
d)根据峰值(ρ,θ),反演出尾迹所在直线,再通过阈值条件确定尾迹的起点和终点。
图2中,重要的处理部分有:
a)掩膜船只,即将船只部分以窗口图像均值代替。本文用5×5像素模板将船只最大限度屏蔽,目的是使船只的目标像素值不影响尾迹检测。
b)用改进的Hough变换船只尾迹识别算法检测尾迹。在Hough变换域中,用
T=ρ+kσ,
(2)
k=(Amax-ρ)/σ+0.8
(3)
确定是否继续搜索峰值的阈值条件;用
T=ρ
(4)
确定是否继续搜索谷值的阈值条件。此处:ρ为窗口图像像素的均值;σ为窗口图像像素的标准差;Amax为Hough变换域中符合条件的第一个最大峰值;T,k均为阈值。

图2 用于ASAR图像船只尾迹检测流程Fig.2 Flowchart of ship wake detectionalgorithm for ASAR image
c)尾迹端点坐标反演。在检测出尾迹所在直线后,先根据是亮尾迹或暗尾迹,用均值判别法确定真实尾迹在原直线中的位置,再通过尾迹和图像背景灰度值间的突变设定阈值条件,确定尾迹的起始点。
基于改进的Hough变换船只尾迹检测算法能快速准确检测ASAR图像中的尾迹。
3 检测算法应用
3.1 数据
本文实验用ASAR数据,工作于C波段,工作模式有5种:图像模式(IM)、极化模式(APM)、宽带模式(WSM)、全球检测模式(GMM)和波模式(WM)[2、8]。
用本文的算法对71景ASAR数据进行分析,数据分布见表1。表1中:VV极化为垂直极化;HH极化为水平极化。结果表明:该算法能快速准确地检测出尾迹。

表1 实验所用数据的详细信息
3.2 结果分析
2007年5月5日获得的ASAR数据的APM图像VV极化模式图如图3(a)所示。由图3(a)可知:其窗口图像中存在十分明显的尾迹。分割出的尾迹窗口图像如图3(b)所示。Hough变换算法检测出的结果如图4(a)所示。本文的改进Hough变换ASAR图像船只尾迹识别算法检测所得尾迹如图4(b)所示。由图3、4可知:相较传统算法,改进的算法能准确识别出尾迹的起始点。
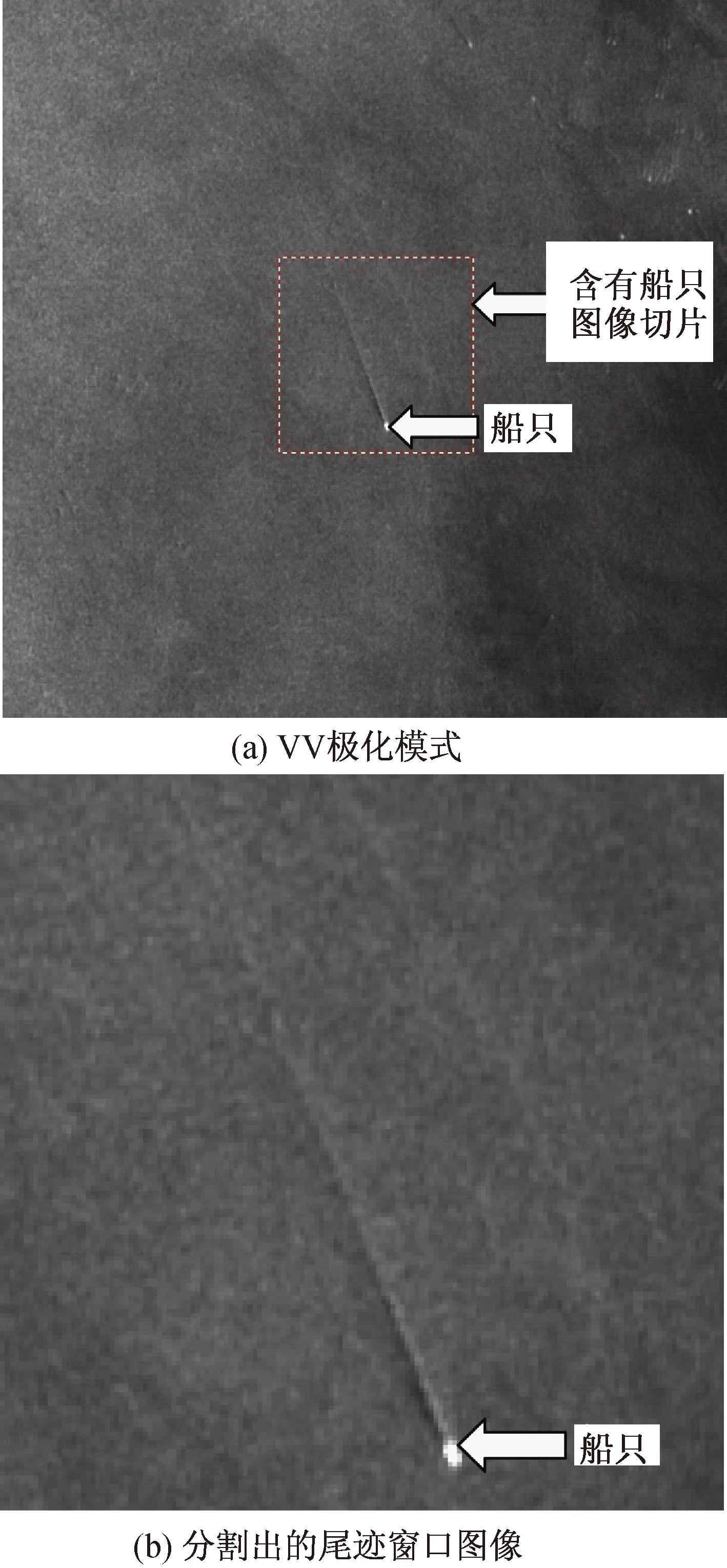
图3 2007年5月5日ASAR数据的APM图像Fig.3 APM image showing a pattern of VVpolarization using ASAR data and wake image of segmentation

图4 不同算法检测结果Fig.4 Wake detected by Hough transform and turbulent wake detected by identification algorithm proposed
2007年5月5日获得的ASAR数据的APM图像VV极化模式图如图5(a)所示。由图5(a)可知:其窗口图像中存在尾迹。分割出的尾迹窗口图像如图5(b)所示。Hough变换算法检测结果如图6(a)所示。本文的改进Hough变换ASAR图像船只尾迹识别算法检测所得尾迹显示如图6(b)所示。由图5、6可知:相较传统算法,改进的算法能准确识别出尾迹的起始点。

图5 2007年5月7日ASAR数据的APM图像Fig.5 APM image showing a pattern of VV polarization using ASAR data and wake image of segmentation on May 7,2007
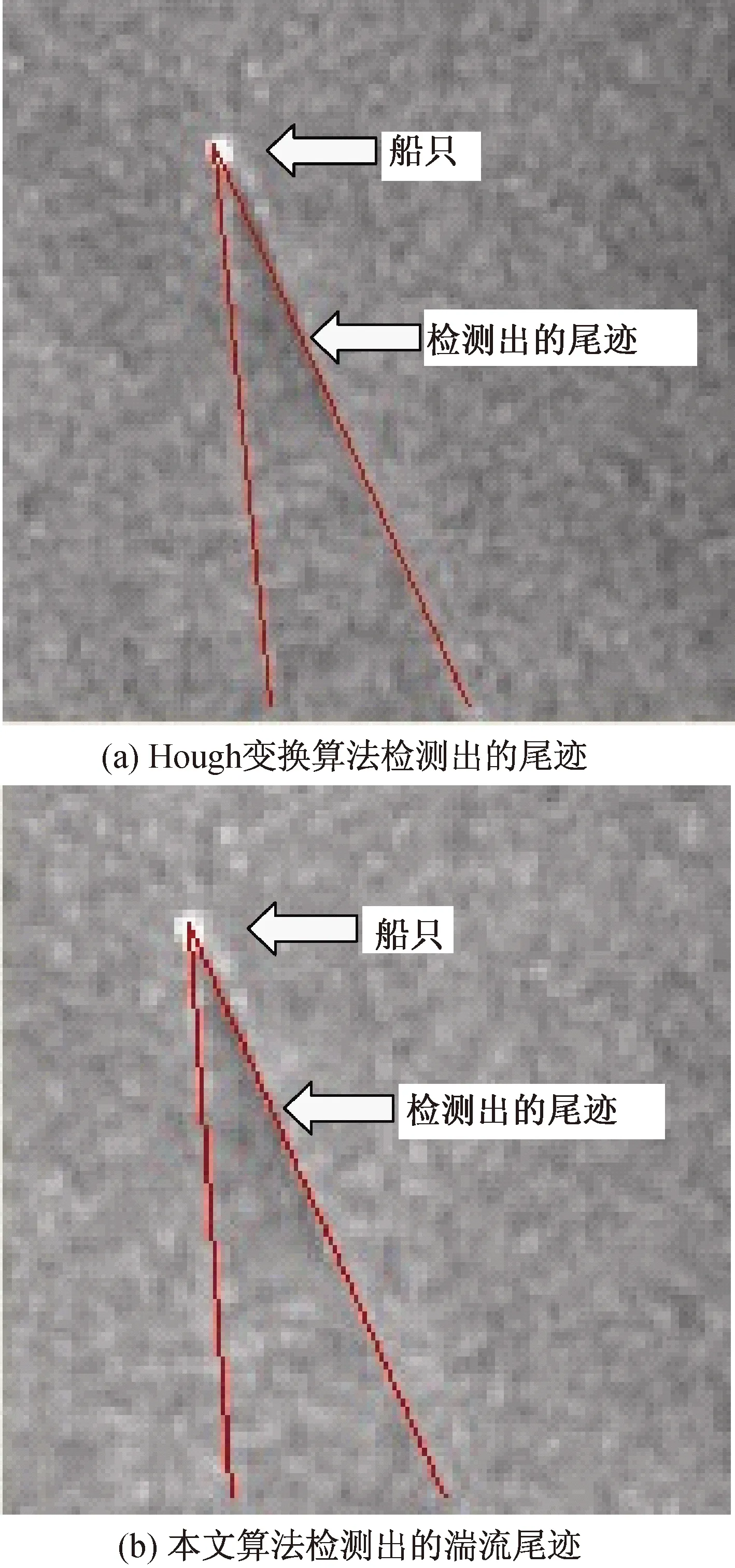
图6 不同算法检测结果Fig.6 Wake detected by Hough transform and turbulent wake detected by identification algorithm proposed
4 结束语
传统的Hough变换未用于ASAR图像检测,且无法确定尾迹的起始点。本文通过改进算法中的检测条件,提出了一种基于改进Hough变换船只尾迹检测算法,并用格式复杂的ASAR图像进行验证,结果表明改进的算法能准确检测出尾迹。文中给出了基于ASAR图像船只尾迹检测算法。通过对2景数据中的尾迹进行实验,对比分析了Hough变换检测算法和改进的算法,发现多数情况下Hough变换对多尾迹的检测并不非常准确,且没有在ASAR图像中应用。改进的算法能较好地弥补此不足,可检测出ASAR图像中的尾迹。研究可得出以下结论:本文的算法适于ASAR图像,将改进的算法用于ASAR图像能检测出尾迹,且检测结果较准确。本文算法可通过在变换域中设定阈值检测尾迹条数,达到了预期目的,实验结果表明该算法对ASAR图像有效。
[1] 艾加秋, 齐向阳, 禹卫东, 等. 一种基于图像分割和归一化灰度Hough变换的SAR图像舰船尾迹CFAR检测算法[J]. 电子与信息学报, 2010, 32(11): 2668-2673.
[2] 种劲松, 朱敏慧. SAR图像舰船检测及其尾迹检测研究综述[J]. 电子学报, 2003, 31(9): 1356-1360.
[3] 种劲松, 朱敏慧. 基于归一化灰度Hough变换的SAR图像舰船尾迹检测算法[J]. 中国图象图形学报, 2004, 9(2): 146-150.
[4] 种劲松, 欧阳越, 朱敏慧. 合成孔径雷达图像海洋目标检测[M]. 北京: 海洋出版社, 2006: 20-22.
[5] 蒋定定, 许兆林, 李开端. 基于Radon变换的SAR图像船迹检测研究[J]. 海洋测绘, 2004, 24(2): 50-52.
[6] 李杭彩, 方景龙, 王晓飞, 等. 基于Hough变换的SAR图像舰船尾迹检测方法[J]. 杭州电子科技大学学报, 2009, 29(1): 71-74.
[7] 马龙, 陈文波, 戴模. ENVISAT的ASAR数据产品介绍[J]. 国土资源遥感, 2005(1): 70-71.
[8] 王连亮, 陈怀新. 基于递归修正Hough变换域的舰船多尾迹检测方法[J]. 系统工程与电子技术, 2009, 31(4): 834-837.
[9] 王世庆, 金亚秋. SAR图像船行尾迹检测的RADON变换和形态学图像处理技术[J]. 遥感学报, 2001, 5(4): 289-294.
[10] 叶文隽. SAR图像舰船尾迹检测研究[D]. 长沙: 国防科学技术大学, 2009.
[11] 张晓燕, 尤红建, 付琨. 基于Radon变换的星载SAR图像窄V尾迹检测[J]. 测绘科学, 2009, 34(2): 117-119.
[12] 周红建, 陈越, 王正志, 等. 应用RADON变换方法检测窄V型船舶航迹[J]. 中国图像图形学报, 2000, 5A(11): 901-905.
[13] COPELAND A C. Localized radon transform-based detection of ship wakes in SAR images[J]. IEEE Transactions on Geosciences and Remote Sensing, 1995, 33(1): 35-45.
[14] DEANS S R. Hough transform from the radon transform[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1981, 3(2): 185-188.
[15] ELDHUSET K. An automatic ship and ship wake detection system for spaceborne SAR images in coastal regions[J]. IEEE Transactions on Geoscience and Remote Sensing, 1996, 34(4): 1010-1018.
[16] LYDEN J D, LYZENGA D R, SHUCHMAN R A. Analysis of synthetic aperture radar imagery of surface ship wakes[C]// International Geoscience and Remote Sensing Symposium (IGARSS’86). Zurich: IEEE, GRSS, 1986: 801-805.
[17] REY M T, TUNALEY J K, FOLINSBEE J T, et al. Application of radon transform techniques to wake detection in SeaSAT-A SAR images[J]. IEEE Transactions on Geosciences and Remote Sensing, 1990, 28(4): 553-360.
[18] WANG Jin-fei, HOWARTH P J. Use of the Hough transform in automated lineament detection[J]. IEEE Transactions on Geosciences and Remote Sensing, 1990, 28(4): 561-566.
Study on Ship Wake Identification Algorithm for ASAR Image Based on Improved Hough Transform
GONG Biao, WANG Hai-tao, XI Pei-li, HOU Yu-sheng, LU Rui-feng
(Shanghai Institute of Satellite Engineering, Shanghai 201109, China)
In order to detect ship wake for advanced synthetic aperture (ASAR) image more accurately, a ship wake detection method based on improved Hough transform method was proposed in this paper. The window image of ASAR was sliced. The window including ship and its wake was determined through the way that the wake was served as the centre and the length which was smaller than wake slightly was served as the height. The pixels’ gray value of the ship was replaced by the gray mean value of the window image, which would not affect the wake identification. The light wake was detected firstly and then the dark wake was detected using improved Hough transform method. The peek was searched in the transform domain according to the threshold set. The wake line was inversed. The start point and end point of the wake were obtained by the threshold conditions. The flowchart of ship wake detection algorithm in ASAR image was given. The ship wake detection for two ASAR images was carried. The results show that the detection algorithm proposed is simple and fast, which can detect the ship wake and identify its start point and end point.
Synthetic aperture radar; Advanced synthetic aperture radar image; Ship wake; Identification; Hough transform; Ship mask; Threshold; Constraint condition
1006-1630(2016)06-0082-06
2016-06-28;
2016-09-15
巩 彪(1986—),男,硕士,主要研究方向为SAR海洋环境仿真。
TN957.52
A
10.19328/j.cnki.1006-1630.2016.06.012
猜你喜欢
农业工程学报(2022年7期)2022-07-09
北京航空航天大学学报(2022年6期)2022-07-02
电子设计工程(2022年12期)2022-06-29
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
北京航空航天大学学报(2017年2期)2017-11-24
环球时报(2012-03-13)2012-03-13
科技传播(2012年2期)2012-02-01
