
整体液压俯仰型式臂式斗轮机伸缩油缸各个铰点的几何布局
2016-02-10 09:13:14王文龙苏士超
环球市场 2016年24期
王文龙 苏士超
北方重工装卸设备分公司
整体液压俯仰型式臂式斗轮机伸缩油缸各个铰点的几何布局
王文龙 苏士超
北方重工装卸设备分公司
整体液压俯仰型式的臂式斗轮堆取料机,是由油缸的伸缩来完成俯仰动作的。本文主要介绍伸缩油缸各个铰点的几何布局,这是完成俯仰运动的机构设计内容
俯仰型式臂式斗轮机;伸缩机构;油缸;几何布局
在整体液压俯仰型式的臂式斗轮堆取料机(以下简称为斗轮机)俯仰过程中,虽然运动是在空间完成。但就我们目前设计的斗轮机,其俯仰运动仍然是平面运动,只不过是在垂直的平面内运动而已。另外,从机构学来说,这种油缸的伸缩仍属于曲柄摇块机构,只是由于把摇块换成了油缸,所以人们称之为摆动式油缸机构(因为油缸的轴线是摆动的,不能称之为曲柄滑块机构),设计者应当明白这普遍的物理概念。
1.油缸的布局
这种伸缩式油缸从油缸的轴线来分,有两种形式,一种是对中式布置,即油缸的两个铰点都在油缸的轴线上;另一种是偏置式布置,即油缸的非活塞杆上的铰点不在油缸的轴线上,而偏在油缸体的外侧,我们一般应用前者。
因为斗轮机的大臂俯仰的角度是为挖取堆顶和堆底的物料服务的,所以将大臂上抬和下俯到堆顶和堆底之后才能布置油缸的各个铰点,当各铰点的几何尺寸布置之后,应验算这几个铰点及油缸的伸缩能否完成这仰与俯的两个极限位置。
由于实际使用中,料堆可能整体下沉造成下俯角度加大,另外,还可能由于安装制造误差造成油缸的行程有可能不足,另外若活塞杆全部伸出,则导向性很差。这些实际中出现的问题是一个成熟的设计者应当考虑周全的。从从容地完成上仰和下俯的角度来看,油缸的行程(即伸缩量)是越大越好,但从油缸活塞杆的稳定性来看,行程是短些为好。所以,这几个几何铰点的设计需要很精确和合理的,一般情况下,我们都是在行程正好满足堆高和堆底的前提下,再上下各加一个50mm左右的行程。
2.油缸的长度
除了行程之外,油缸由于其自身结构的需要有一个刚性的长度(这个刚性长度主要包括耳环——我们称为缸头、活塞、前后端盖、导向套等),而且一般情况下这个刚性长度很难压缩,即是一个定值。(见图1)
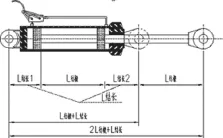
图1 《油缸的伸缩示意图》
当油缸的活塞杆伸缩到最小的尺寸时,二耳环之间的距离为一个行程和刚性长度之和;当油缸的活塞杆伸出到最大尺寸时,二耳环之间的距离为二个行程和刚性长度之和。这就象自行车打气筒一样,当用打气杆向下压缩气体到打气筒的最底时,打气筒要比(行程)长一些,这是因为有结构上的刚性长度的存在,当拔出打气杆到最顶端时,打气筒的总长是二个打气杆的长度和刚性长度之和。但不论如何,后者除以前者都大于1而小于2。这其中的道理请列式即可解得。
为说明方便,令油缸这个结构刚性长度为L结长,根据2.1节最后的论述我们在油缸额定行程的两端各加上50mm来考虑和分析问题。令上下各加上50mm后的油缸活塞杆伸出后两铰点的最大极限距离为L伸极,油缸活塞杆收缩后的两铰点的最小距离为L缩极,(在实际设计斗轮机的俯仰行程限位开关的时候,应将工作行程限位开关布置在上下未加上50mm的位置上,因为这上下50mm是留给料堆的下沉和增加活塞的导向性的)。
再令此时的油缸活塞的行程为L行极,很明显,L行极=L伸极-L缩极。当然,在设计的CAD图上时也还是要做出上下没加上50mm时的图形来,即理论额定两铰点的距离,其伸出额定距离为L伸额,其收缩后的额定距离为L缩额,此时,斗轮的轮斗在高位置紧贴物料的堆顶的上表面;在低位时斗轮轮斗的是紧贴地面(留200mm即可)的。
3.验算各铰点几何尺寸
很明显,油缸收缩到最小尺寸L缩极,要保证行程L行极,全部退回到油缸内并要保证不得压缩L结长,所以,L缩极,充分和必要条件是:L缩极≥L行极+L结长——①
当油缸伸出到最大的尺寸L伸极时,即是从L缩极又伸出一个行程L行极的过程,即是①式的两边各加上一个L行极得过程,得:L缩极+L行极≥L行极+L行极+L结长
即得有:L伸极≥2L行极+L结长——②
这①,②两式就是验算几何尺寸能否完成俯仰角度的关系式。式中L结长是油缸的参数,对应不同直径的油缸,可在样本中查到该尺寸,而其他三个尺寸是可以用作图法得到的。
结语
整体液压俯仰型式的臂式斗轮堆取料机是由油缸的伸缩来完成俯仰动作的。油缸只而一个执行元件, 对于斗轮机设计者来说应该掌握的内容除伸缩油缸各个铰点的几何布局还有以下五点
1.油缸的机构动力学的计算(如油缸活塞杆及摇杆的速度,角速度,传动角及各个角度相互间的变化对各杆件受力的影响等);2.斗轮机上部重量对伸缩油缸拉力和压力的分配3.斗轮机上部重心的确定及各种构件的受力计算。(这部主要应用平面力系的弯矩平衡方程、力系平衡合力为零、杠杆原理来计算)。4.如何确定斗轮处的离地力或用流体压差法确定离地力。5.液压系统的原理设计。
[1]《斗轮堆取料机》化工工业出版社
[2]《机械设计手册》化工工业出版社
猜你喜欢
机械设计与制造(2024年1期)2024-01-26 09:18:26
起重运输机械(2022年19期)2022-11-05 01:31:08
探索科学(学术版)(2020年9期)2021-01-20 07:56:46
装备维修技术(2020年3期)2020-11-20 18:12:10
建筑机械(2020年3期)2020-03-01 05:10:38
建筑机械(2020年7期)2020-02-22 10:40:26
制造技术与机床(2019年11期)2019-12-04 05:50:48
疯狂英语(双语世界)(2016年1期)2016-02-27 10:11:05
学习月刊(2015年22期)2015-02-28 11:57:26
中国航海(2014年1期)2014-05-09 07:54:17
