摄动影响下避撞系统制动控制器设计与试验
2016-02-09 09:28袁朝春刘逸群
重庆理工大学学报(自然科学) 2016年12期
袁朝春,刘逸群,吴 飞
(江苏大学 a.汽车工程研究院;b.汽车与交通工程学院,江苏镇江212013)
摄动影响下避撞系统制动控制器设计与试验
袁朝春a,刘逸群b,吴 飞b
(江苏大学 a.汽车工程研究院;b.汽车与交通工程学院,江苏镇江212013)
为了提高主动避撞系统在超载、热衰退和水衰退等情况下的制动控制效果和鲁棒性能,以奇瑞某款智能车为研究对象,考虑实际中的参数扰动,利用线性分式变换建立摄动模型,根据μ综合理论设计制动控制器。利用奇瑞无人车试验平台,在不同的摄动条件下对μ控制器和基于标称模型的H∞控制器进行仿真和试验验证。结果表明:相比于H∞控制器,μ控制器能有效抑制参数不确定及外界传感器噪声干扰,具有更好的闭环鲁棒性。
避撞系统;μ理论;参数摄动;鲁棒性
国家公路安全委员会调查表明,在道路致死的事故中,80%以上是由于驾驶员本身过失引起的。近年来,被动安全技术对驾乘人员的保护已趋于极致,现有的被动安全技术和保护措施已经满足不了人们对于交通安全的要求。主动避撞系统能够在潜在危险发生之前提醒驾驶员,并在危险情况时自动采取避撞措施,最大限度地减少交通事故对驾驶员的危害。而制动控制又是该系统的一个重要组成部分,良好的制动控制器能保证避撞系统在各种工况下都有较好的避撞效果,已经成为各国研究的热门方向[1-6]。现有制动控制系统所采用的控制理论主要有PID、模糊控制理论等,这些理论的应用达到了一定的控制效果[7-10]。但是它们都没有考虑车辆参数变化、外界环境干扰等客观存在的因素对控制器性能造成的影响,这些扰动会造成系统超调量增多、调整时间长等问题,甚至会导致系统的不稳定,严重影响鲁棒性能。而μ理论[13]在设计时,考虑了系统中的参数摄动和外界噪声干扰,将输入输出、摄动、传递函数等所有的线性关联重构,以隔离不确定性和各类摄动。该方法能将性能鲁棒性和鲁棒稳定性协调统一,是解决控制系统中存在干扰、摄动等问题的较好方法。
本文以奇瑞某款采用盘式制动的智能车为研究对象,利用无人车平台,采用μ综合控制理论,分析了系统中的参数摄动和外界干扰,设计μ控制器,并通过仿真和试验将μ控制器与H∞控制器进行对比,验证控制器效果。
1 主动避撞系统纵向动力学模型
纵向动力学系统模型是实现车辆主动避撞系统功能的基础。图1是车辆主动避撞系统纵向动力学模型,反映了车辆纵向各组成部分之间输入输出关系[11-12],其中:实线表示力的传递方向;虚线表示信号的传递方向。
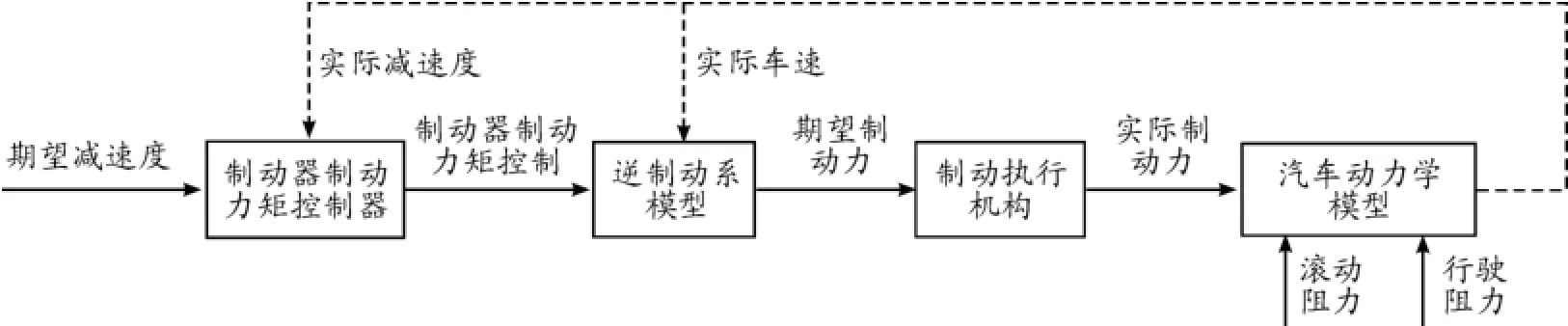
图1 主动避撞系统纵向动力学模型
1.1 制动器模型
制动器模型是用来描述液压缸的压力和制动力矩之间函数关系的数学模型。在汽车制动过程中,液压制动轮缸产生制动压力,通过活塞推动摩擦片来压紧制动盘以产生摩擦,从而产生制动摩擦力矩。制动盘的受力情况如图2所示。
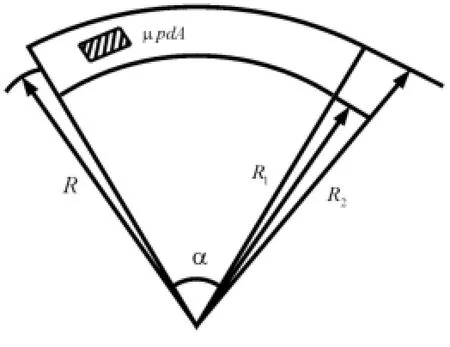
图2 制动盘受力分析
通常情况下,轮缸压力pw和摩擦片施加的压力Np之间的力学关系表达式如下:

式中:Np为摩擦片施加的正压力;pw为液压制动轮缸压力(MPa);Amc为摩擦片截面积(cm2)。
制动盘的压力表达式为:

式中:R1,R2为制动盘的内、外半径;φ为制动盘受力弧度角度。
取制动盘中一个尽可能小的受力单元,所受的摩擦力为μp d A,其中μ表示制动盘和摩擦片之间的摩擦因数。由于制动盘两侧都受到力,所以液压制动力矩为:

将式(2)代入(3)可以得到液压制动力矩:

1.2 整车运动系统模型
由于本文仅考虑纵向运动,因此,把模型简化成两轮模型,如图3所示,其中:v代表车速;Fw代表空气阻力;TbfTbr分别表示前轮、后轮的制动力矩;Wf,Wr表示前后轮的垂直载荷;G代表重力。
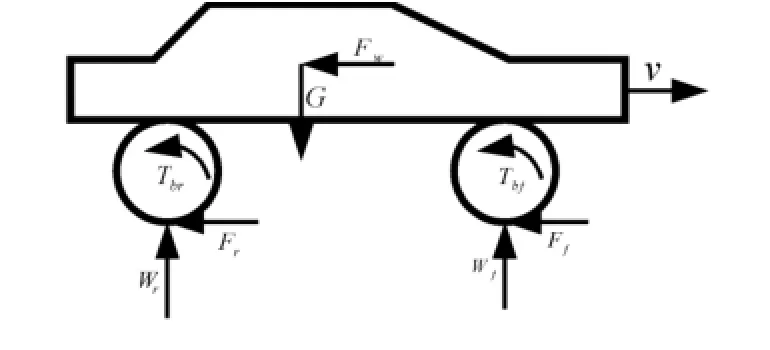
图3 车辆纵向受力
根据图3可以得到前后车轮运动方程:

其中:Jf,Jr分别表示前后轮转动惯量;rr表示轮胎的转动半径;ω代表转速;f表示滚动阻力系数。
前后轮垂直载荷:
其中:L为轴距;M表示整车质量;Lf,Lr分别表示前后轴到重心的距离。
车轮转速与车速有如下关系:

联立式(5)~(9),得到整车运动系统模型:其中:Aa为等效迎风面积;Cd为风阻系数。
1.3 制动执行器模型
制动执行器采用直流电机与钢丝拉线组合的形式结构。电机根据制动执行器的控制信号确定正转还是反转。当电动机正转(逆时针转动)时,钢丝拉线在电动机拉力作用下,沿定滑轮滑移,带动制动踏板下移,实现制动。当电动机反转(顺时针转动)时,钢丝拉线在制动踏板回位弹簧作用下,沿定滑轮滑移,制动踏板上移至初始状态,制动脱离。制动执行机构对车辆行驶安全性影响较大,考虑到执行机构和电机可能存在延迟影响系统响应特性,本文拟采用用一阶惰性系统模型对制动系统的响应迟滞特性进行表述,如式(7)所示。

其中:Pdes表示期望的制动压力;tb为系统惰性常数,取值0.1;Pb为实际中制动执行器的执行压力。
1.4 逆制动系模型
主动避撞系统根据期望加速度通过逆制动模型计算期望制动压力,由制动执行器进行制动控制,实现期望的制动压力。制动执行根据车辆受力分析和制动力与制动压力之间的关系,可得到期望制动压力Pdes:

其中kb为制动力和制动压力的比值,kb=1 185。
1.5 系统参数不确定性
在车辆行驶过程中,空载和满载的不同导致整车质量M在一定范围内存在变化。同时,由于长时间制动产生的热衰退和涉水时产生的水衰退会使得制动盘摩擦系数μ产生摄动。考虑到这些参数摄动会对主动避撞系统有比较大的影响,所以对微分方程中的摄动参数进行线性分式变换处理:
2 制动鲁棒控制器设计
2.1 控制器结构设计
为保证控制系统性能鲁棒性和鲁棒稳定性,在系统建模时,应充分考虑外界干扰和参数摄动的影响。本文所设计的主动避撞系统有5个输入量:

6个输出量:

控制量是控制加速度acon。对摄动模型中的各个输入输出及扰动等线性关联重构,并隔离所有摄动,得到了下位控制系统μ控制框图,如图4所示。
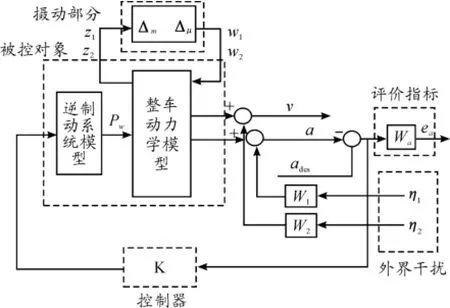
图4 制动控制系统μ控制框图
2.2 控制器性能指标设计
本文设计μ综合鲁棒控制器考虑以下几点:
2)当整车质量、摩擦因数发生改变时,系统有较强的鲁棒性,保证控制器的可靠性。
3)减少传感器噪声对系统的干扰,保证系统的性能鲁棒性。
2.3 控制器权函数选择
主动避撞控制系统需使用加速度和速度传感器来采集相关信号,所以,产生的噪声干扰有加速度和速度传感器噪声。η1,η2分别表示加速度和速度传感器的噪声输入,W1,W2为对应的权函数。取表明加速度传感器在低频处的测量噪声为0.24 m/s2,而在高频处为0.68 m/s2。取表明车速传感器在低频处的测量噪声为0.13 m/s,而在高频处为0.3 m/s。经过不断试算,最终取来控制稳态误差为5%。
3 仿真与试验
在Matlab的μ工具箱中,断开图4中的不确定模块,初步选定其中的权函数,对主动避撞制动开环控制系统结构图求解μ控制器。求解μ控制器、系统仿真及试验的参数,依据该奇瑞智能车的实际测量值,见表1。

表1 仿真、试验主要参数
将图4中的测量信号Δa反馈输入到所求解的μ控制器中,同时,将控制器的输出acon输入到控制系统组成整个闭环控制系统。
由于H∞鲁棒控制理论能够有效处理非结构不确定性问题,但是对于结构不确定性问题则存在较大的保守性。本文为了综合评估μ控制方法的鲁棒性,对于上述结构,在不改变输入输出的情况下,根据H∞鲁棒控制理论,设计了H∞控制器并将两种控制器进行分析对比。关于H∞控制器的设计方法参考文献[14]。
3.1 仿真分析
利用Simgui工具箱模拟避撞系统对期望加速度的响应效果,期望加速度为幅值为-0.5 m/s2的阶跃输入,各传感器的噪声假设为协方差为0.01的随机测量噪声。针对μ控制器在质量增加30%和摩擦因数减少30%的工况下对系统进行仿真,并与H∞控制器进行对比,验证控制器鲁棒性。
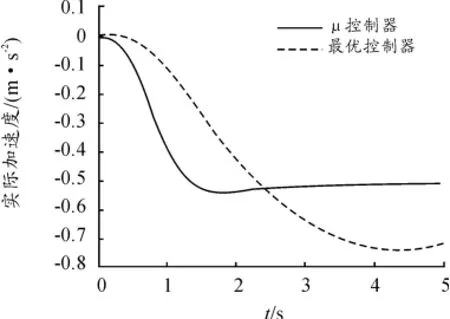
图5 纵向加速度仿真曲线

图6 纵向加速度误差仿真曲线
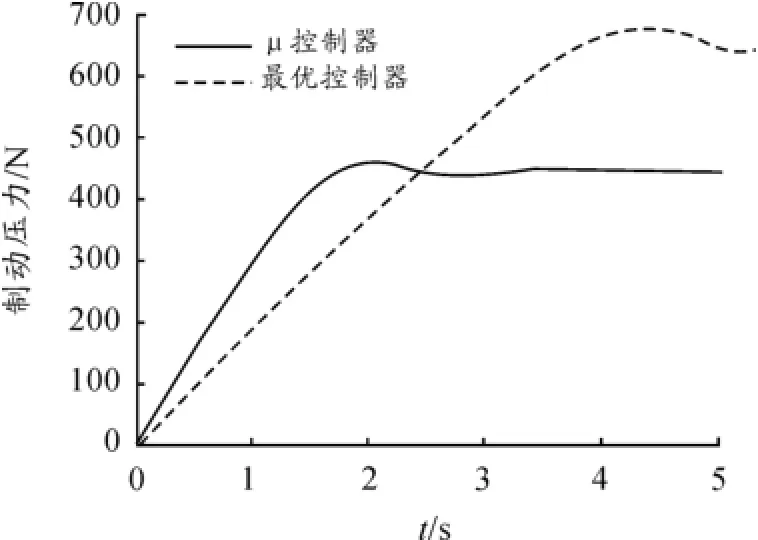
图7 制动压力仿真曲线
由图5~7显示了当质量增加30%时,μ控制器和H∞控制器控制下系统的实际加速度、加速度误差和制动压力。比较图5和6可得,μ控制器在1.5 s左右可以达到期望加速度,且能将稳态误差控制在5%以内。同时由图7可得:延迟μ控制器在1.8 s达到期望制动压力,达到了较好的控制效果;H∞控制器在5 s时,加速度为-0.75 m/s2,稳态误差接近50%,达到期望制动加速度的能力较差。
图8~10分别表示当摩擦因数减少30%时,μ控制器和H∞器控制下系统的实际加速度、加速度误差和制动压力。由图8和10可知:在5 s内,H∞控制器不能达到期望的加速度,而且制动压力有较大范围的波动。由图9可知:H∞控制器的实际加速度和期望加速度误差较大,最大偏差达到0.27 m/s2,而μ控制器在1.3 s左右,系统达到期望的加速度,并使得相对误差稳定在一个较小的范围内。
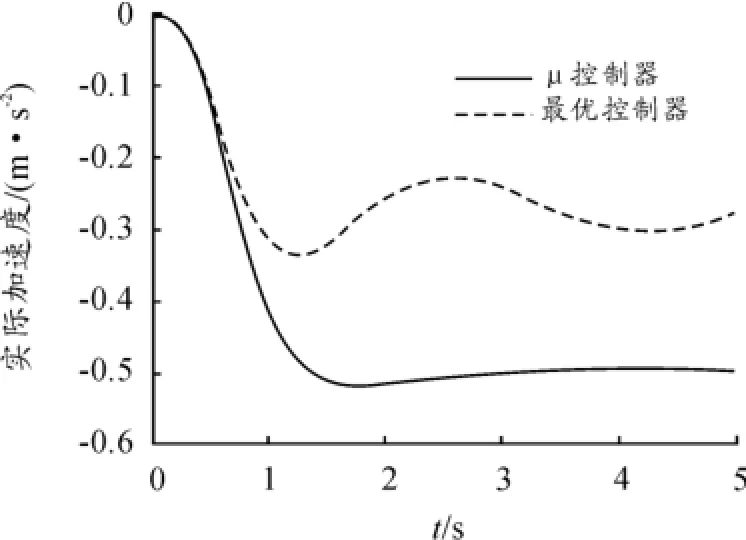
图8 纵向加速度仿真曲线
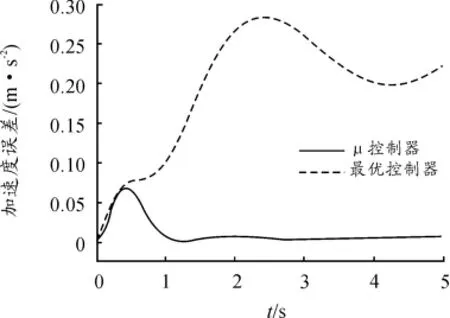
图9 纵向加速度误差仿真曲线
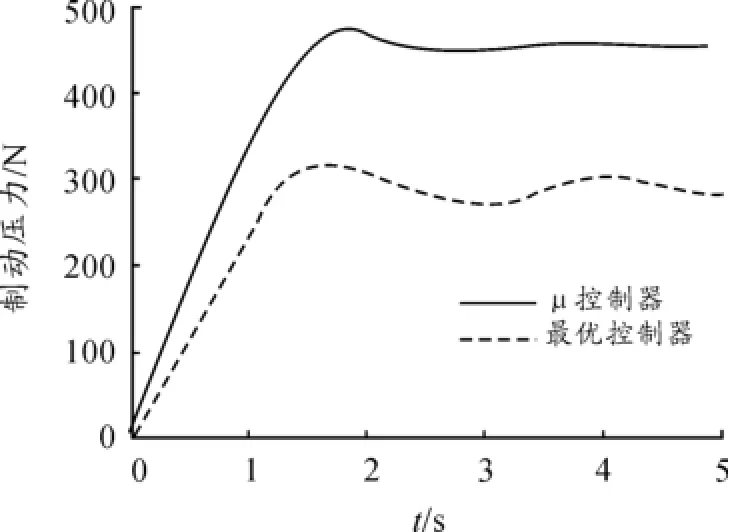
图10 制动压力仿真曲线
3.2 实验验证
利用图11所示的实车实验平台验证整车对期望加速度的响应。通过更换不同的摩擦片材料来改变摩擦因数,通过在实验车装质量块来模拟载荷变化。平台包含以下几个部分:
1)执行机构:制动执行器采用直流电机与钢丝拉线组合的形式结构。
2)控制系统:利用型号为ARK-3440F的工业工况机来实现对整车制动系统的实时控制,根据实际情况计算期望的制动减速度,将控制信号输出给执行机构,控制电动机的转动达到期望减速度。
在路面附着系数为0.8的干燥沥青路面上进行实验。输入期望加速度为-0.5 m/s2,通过加速度传感器实时检测实车加速度的响应情况。分别在质量增加30%和摩擦因数减少30%的两种工况下对μ控制器和H∞控制器进行实车实验,实际加速度实验结果如图12和13所示。
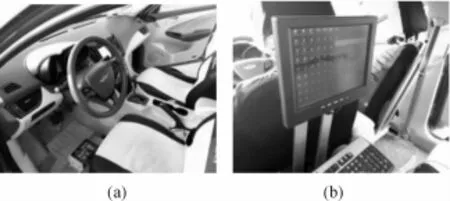
图11 实车实验平台
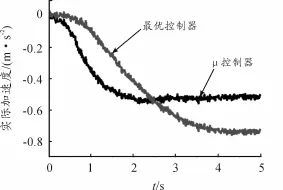
图12 质量增加30%实车加速度实验曲线
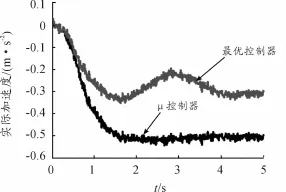
图13 摩擦因数减少30%的实车加速度响应曲线
图12显示了在实际质量增加30%的情况下,μ控制器在1.7 s时,期望加速度达到-0.5 m/s2,并稳定在一定范围内。而在H∞控制器控制下,整车在5 s内都未达到期望的加速度,且超调量达到0.26 m/s2。说明在实际质量存在大范围摄动时,μ控制器具有较好的鲁棒性和较好的制动性能。由图13可知:当摩擦因素减少30%时,在H∞控制器的控制下,整车无法达到期望加速度,最大制动加速度仅达到-0.35 m/s2,有明显的制动力不足的情况,严重影响了实际安全。而在μ控制器控制下,在1.4 s时,实车达到期望加速度,并且将稳态误差控制在5%以内,说明μ控制器在摩擦系数变化下仍有较好的控制效果。
4 结论
在非线性车辆纵向动力学模型的基础上,对主动避撞制动系统中参数摄动进行分析,利用奇瑞无人车实验平台对设计的制动μ控制器进行分析,由仿真和试验结果得到如下结论:
1)设计的μ控制器能很好地抑制外界干扰和参数摄动对系统的影响,具有较好的鲁棒性。为以后解决主动避撞系统实际参数变化对制动控制效果的影响提供了参考。
2)相比于H∞控制器,μ控制器更快达到期望减速度,控制超调量更小,整体控制效果更优。
[1] 宋晓琳,冯广刚,杨济匡.汽车主动避撞系统的发展现状及趋势[J].汽车工程,2008,30(2):285-289.
[2] 龙伟,魏玉聪.基于毫米波雷达的高速弯道扇形预警模型[J]四川大学学报,2015,47(3):151-157.
[3] 刘志新,张大卫,李幼德.基于滑转率的四轮驱动汽车防滑模糊控制仿真[J].农业机械学报,2005,36(12):21-24.
[4] 刘学军,何仁.电磁-液压复合防抱死制动系统滑模控制[J].农业机械学报,2014,45(5):1-7.
[5] SEUNGWUK M,ILKIM,KYONGSU Y.Design,Tuning,and Evaluation of A Full-range Adaptive Cruise Control System with Collision Avoidance[J].Control Engineering Practice.2009,13(17):442-455.
[6] LU Xiaoyun,TAN Hanshue,DAN Empey.Nonlinear Longitudinal Controller Development and Real-time Implementation[J].California PATH Report,2012,15(1):223-229.
[7] YI K,HONG J.A Vehicle Control Algorithm for Stopand-Go Cruise Control[J].Proc Instn Mech Engrs,2011,6(2),67-73.
[8] CHOISB,DEVLIN P.Throttle and brake combined control for intelligent vehicle highway systems[J].SAE Paper,2009,23(5):34-40.
[9] CONNOLLY TR,HEDRICK J K.Longitudinal transition maneuvers in an automated highway system[J].Atlanta GA volume,2010,12(3):346-352.
[10]GERDES J,HEDRICK J K.Brake system requirements for platooning on an automated highway[J].Proc ACC Seattle,2013,42(3):165-169.
[11]侯德藻,高锋,李克强,等.应用于汽车主动避撞系统的车辆纵向动力学模型[J].清华大学学报(自然科学版),2004,44(2):258-261.
[12]GERDES JC,HEDRICK JK.Brake system modeling for vehicle control[J].Advanced Automotive Technologies.2010,13(4):105-112.
[13]PACKARD A,DOYE L J.The comp lex structured singu larva lue[J].Automatica,1993,29(2):71-109.
[14]LIMEBEER D JN,KASENALLG E.H∞optimal control of a synchronous turbo generator[C]//Proceedings IEEE CDC.Athens:IEEE,1986:62-65.
(责任编辑刘 舸)
The Design and Test of Brake Controller in Collision Avoidance System Under the Influence of Perturbation
YUAN Chao-chuna,LIU Yi-qunb,WU Feib
(a.Automotive Engineering Research Institute;b.School of Automobile and Traffic Engineering,Jiangsu University,Zhenjiang 212013,China)
In order to improve the brake control effect and robust performance of collision avoidance system under overload,heat recession and water recession.A Chery intelligent car was taken as the research object,and parameter perturbation was considered,and perturbation model was established by linear fractional transformations.The μ controller was designed by using μ theory,and simulation and intelligent car platform were used to test the robustness of μ controller compared with H∞controller.The results showed that,μ controller had better robust performance,and it can reduce disturbance arising from parameter uncertainties and sensor noise effectively.
collision avoidance system;μtheory;parameter uncertainties;robustness
U463.33
A
1674-8425(2016)12-0001-07
10.3969/j.issn.1674-8425(z).2016.12.001
2016-02-18
江苏省“六大人才高峰”项目(2012-ZBZZ-029)
袁朝春(1978—),男,江苏徐州人,博士,副教授,主要从事汽车主动安全研究;通讯作者刘逸群,硕士研究生,主要从事汽车主动安全研究,E-mail:liuyiqun1991512@163.com。
袁朝春,刘逸群,吴飞.摄动影响下避撞系统制动控制器设计与试验[J].重庆理工大学学报(自然科学),2016(12):1-7.
format:YUAN Chao-chun,LIU Yi-qun,WU Fei.The Design and Test of Brake Controller in Collision Avoidance System Under the Influence of Perturbation[J].Journal of Chongqing University of Technology(Natural Science),2016(12):1-7.
猜你喜欢
当代水产(2022年6期)2022-06-29
煤气与热力(2021年12期)2022-01-19
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
筑路机械与施工机械化(2014年4期)2014-03-01