
等速肌张力测试系统的开发
2016-02-09 06:38许胜强杨先军
中国医疗器械杂志 2016年3期
刘 坤,王 训,陈 炜,唐 正,许胜强,程 楠,王 振,杨先军
1 中国科学院合肥智能机械研究所,合肥市,230031
2 中国科学技术大学自动化系,合肥市,230026
3 安徽中医药大学神经病学研究所附属医院,合肥市,230061
4 安徽省体育科学技术研究所,合肥市,230001
等速肌张力测试系统的开发
【作 者】刘 坤1,2,王 训3,陈 炜4,唐 正1,许胜强1,2,程 楠1,3,王 振1,杨先军1
1 中国科学院合肥智能机械研究所,合肥市,230031
2 中国科学技术大学自动化系,合肥市,230026
3 安徽中医药大学神经病学研究所附属医院,合肥市,230061
4 安徽省体育科学技术研究所,合肥市,230001
针对帕金森病患者的肌张力障碍,该文设计了一种新型等速肌张力测试系统。该系统包括机械装置、数据采集单元和上位机数据处理分析软件。其中机械装置包括手臂支撑装置、安全限位装置、高度调节装置等;数据采集单元由力矩传感器模块、电机控制模块、数据通信模块等组成,用于控制手臂进行等速运动并将传感器的模拟信号转换成数字信号实时传输到上位机;上位机数据处理分析软件采用USB接口传输数据,基于VC++程序开发,完成数据处理、显示、存储及报表生成等功能。实验结果表明:设计的等速肌张力测试系统安全可靠,不仅能够较好地评估帕金森患者的肌张力异常程度,还能应用于辅助肌张力患者的康复训练,具有较强的可扩展性。
帕金森病;肌张力障碍;等速测量;USB通信
0 引言
帕金森病(PD)又称震颤麻痹,是发生于中老年人群的退行性神经系统变性疾病,其典型临床表现为静止性震颤、肌僵直、运动迟缓和姿势反射障碍[1],其中肌僵直的主要临床表现形式为肌张力异常,对病人的生活质量造成严重影响,客观准确地测量PD患者的肌张力状态,尤其是根据治疗PD药物对肌张力的影响进行分析具有十分重要的临床意义[2]。
当前评估PD患者肌张力状态的方法主要有量表评估与仪器测量。其中量表评估多以ashworth(MaS)量表为依据[3],由于是徒手评估,受医生主观影响较大,可信度较低。临床上出现的测量仪器按手臂测试状态主要有等长和等速两种类型仪器。其中等长测试类有美国的Myotonometer[4]、徐秀林等[5]研制的等长肌力测试仪等,用于测量静息状态下的肌张力大小,操作简单,但由于手臂处于静止状态不能获取患者的运动性肌张力,而运动性肌张力才是保证肌肉运动连续、平滑(无颤抖、抽搐、痉挛)的重要因素,因此等长测试仪器不完全符合临床要求。等速测试类主要有美国BIoDeX为代表的多关节等速肌力测试系统,能够提供详细的等速运动中各项肌肉功能参数以及清晰的力矩曲线,对肌张力状态评估给出客观准确的评价[6],但该系统针对全身关节进行测试,存在体积庞大、造价过高等缺点,因此临床应用较少。此外,Wright D等[7]研制的便携式肌张力测试系统用于测量运动过程中患者的肌电信号,可以很好地区分正常人和帕金森病患者,但是对于肌张力异常程度缺乏可靠的评估。因此针对以上问题,本文研制了一种等速肌张力测试系统,它通过伺服电机配以安全装置和相关传感器驱动患者手臂进行等速测试,结构简单、成本低、安全性高,可以直接测量帕金森病患者的动态肌张力大小,符合临床应用要求。
1 机械装置设计
系统在测试之前需保持肘关节运动轴心与系统运动轴轴心基本一致,再用柔性绷带固定上臂和腕部,通过数据采集单元的电机控制模块驱动电机带动患者手臂进行等速运动。由于不同患者的身高、臂长存在差异性,因此系统机械结构设计不仅要保证测试安全还必须针对不同个体具有可调性。根据上述特点,系统机械结构设计为整体高度可调以适应不同测试体位(坐姿、卧姿),腕部支撑结构和高度调节杆均长度可调,腕部支撑结构和上臂固定结构角度可调。为保证测试安全,除了软件限位外,系统在减速机输出轴与末端运动轴之间设有安全离合器,使减速机输出轴和末端运动轴在电机输出扭矩超过设定值时瞬间脱离,并且停止手臂运动。此外,系统在运动轴末端还配以相应的机械硬限位结构,具体设计为在一个环状机械盘上加工24个螺孔,控制精度为15°,其中4个用于固定环状机械盘。同时在运动轴末端径向安装一个长度为8 cm的限位柱,再配以两个定位销按照测试角度要求安装在环状机械盘上,将手臂撑杆限制在规定位置内。系统机械装置整体设计框架如图1所示,装置示意图如图2所示。

图1 机械装置设计框架Fig.1 Mechanical device design frame

图2 机械装置示意图Fig.2 Schematic diagram of mechanical device
2 数据采集单元设计
数据采集单元主要功能为等速运动控制、角度和力矩信号采集、数据实时传输、安全保护等,采用具有32位aRM cortexTM-M3内核的STM32F205ZeT6[8]作为处理器核心,主要包括电源模块、USB通信模块、电机控制模块、力矩传感器模块、外围电路等。由于系统存在伺服电机,电磁干扰比较大,因此在电路设计中需要注意减少来自伺服电机的电磁干扰。系统数据采集单元设计框架如图3所示。
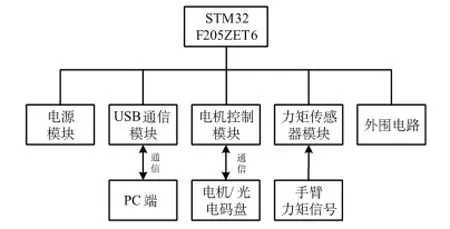
图3 数据采集单元设计框架Fig.3 Data acquisition unit design framework
2.1 电源模块
数据采集单元电路输入电压为24 V,采用VRB1205ZP-6WR2作为第一级电压转换芯片,将24 V电压转换为5 V电压,给需要5 V电压的模块提供稳定电压,然后再采用LM1117MP-3.3作为电压转换芯片将5 V电压转换为3.3 V电压。其中由于伺服电机的电磁干扰比较强,电路供给伺服控制器的5 V电压需要经过B0505S-2W电源模块进行隔离。整个电源模块为系统提供稳定电压,抗干扰能力强。
2.2 数据通信模块
数据采集单元设计中数据通信有串口通信、USB通信。其中USB用于和上位机Pc客户端通信,进行数字信号传输,数据采样频率为500 Hz。串口用于和伺服控制器通信,发送控制命令信息,电路采用MaX232cSe作为电平转换芯片。
2.3 电机控制模块
由于测试过程中手臂位置和力矩不断变化,为了保证等速测试,系统对电机控制采用闭环控制,在测试过程中加入光电码盘实时采集运动过程中的手臂位置信号,中央处理器根据终端手臂位置变化量实时控制电机输出,以保持整个测试过程中的等速运动,最终形成对电机的闭环控制。电机控制模块对手臂运动范围可以设置1°~10°的缓冲角度以保证测试安全及运动的平稳性。电机控制模块对电机位置及速度的控制采用脉冲输入控制模式,通过I/o口发送脉冲信号,控制手臂等速运动,信号传输电路采用集极开路(单相最高脉冲频率200 kHz)方式,命令的形式为脉冲加方向。光电码盘采用增量式旋转编码器作为系统终端速度检测元件,得到aB相脉冲波经过LS7084芯片进行解码后发送给中央处理器进行处理。光电码盘信号处理电路图如图4所示。
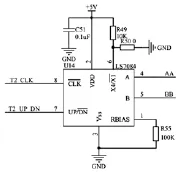
图4 光电码盘电路图Fig.4 Photoelectric encoder diagram
2.4 力矩传感器模块
系统力矩信息的获取采用应变片扭矩传感器[9],通过将电阻应变片粘贴在仪器运动轴表面相应位置,在测试过程中轴受到手臂力矩作用产生应变,致使电阻应变片的电阻发生变化,通过惠斯顿电桥和测量电路把应变转换成电信号传输给数据采集单元中的力矩传感器模块进行处理,最终得到力矩值。
力矩传感器模块的信号调理采用TI公司的单电源自动归零传感器放大器PGa308芯片,支持可编程增益与偏置,可放大传感器信号,并实现归零(偏置)与扩展(增益)的数字校准,同时采用LM324四运算放大器构成Sallen-key低通滤波器,对力矩信号进行滤波处理,电路图如图5所示。
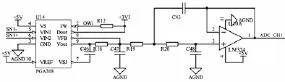
图5 力矩传感器模块电路图Fig.5 circuit diagram of torque sensor module
3 数据处理分析软件设计
数据处理分析软件选用VS2010开发环境,基于MFc应用程序框架设计和实现,主要功能有:数据采集显示(包括力矩、角度等),数据分析与报表生成,数据存储(病人、医生信息及测量数据的存储[10])以及历史回放(根据存储数据回放运动过程)等。数据处理分析软件与数据采集单元通过USB接口实现数据通信,USB驱动程序基于NI-VISa进行开发,NI-VISa(Virtual Instrument Software architecture)是美国国家仪器公司(National Instrument)开发的一种用来与各种仪器总线进行通信的高级应用编程接口,提供了非常强大的仪器控制与资源管理功能,极大地提高了软件的开发效率[11]。
软件界面和软件操作流程图分别如图6和图7所示。

图6 软件运行界面Fig.6 Software running interface

图7 软件操作流程Fig.7 Software operation process
3.1 NI-VISA驱动设计
NI-VISa自3.0版起,支持USB通信,有2种类型的VISa资源参与支持:USB INSTR和USB RaW。符合“USB测试和测量类型(USBTMc)”协议的USB设备为USB INSTR,不符合的为USB RaW设备。USB INSTR无需配置即可实现与USBTMc设备的通信,而USB RaW则需要通过配置NI-VISa才能控制USB设备。数据采集单元软件设计时的规范并不参照USB INSTR,因此需要NI-VISa配置驱动程序,可以分为以下三个步骤,如图8所示。

图8 NI-VISa配置步骤Fig.8 confguration steps of NI-VISa
在USB驱动开发中,仪器的制造商代码和产品代码分别是:0x0483和0x2015,仪器描述符为USB0::0 x0483::0x2015::0000000000001::RaW。仪器USB驱动利用了2类USB实现通信,分别为控制端点和批量端点,用于发送命令和传输数据。Pc端识别底层设备之后,上位机软件与USB设备通信采用DLL动态链接库调用来实现。由于NI公司公开了NI-VISa常用的所有aPI函数的接口定义和源代码,我们只需要把库函数封装成DLL动态链接库文件,上位机软件开发时对其进行简单的输入、输出调用即可,极大地提高了开发效率[12]。
3.2 特征参数提取的软件实现
Pc端接收到数据采集单元提供的数据为时间戳、力矩和角度信号,通过均值平滑滤波算法对数据进行滤波处理,最后进行相关特征参数提取。测试结果包括原始数据和相关特征参数,可以通过报表或csv文本文件形式显示和保存。对肌张力评价有重要意义的特征参数主要有[13]:(1)峰力矩PT,代表了肌肉收缩产生的最大肌力,具有较高重复性和准确性,为黄金指标和参照值;(2)力矩加速能Tae;(3)平均功率aP;(4)峰力矩体重比(PT/BW);(5)平均关节活动度(aRoM)等。现阶段除了峰力矩用于被动测试,后面参数均为病人做主动等速运动时的特征参数,被动测试中的其他参数提取有待后期进一步研究。特征参数提取处理过程具体如图9所示。

图9 特征参数提取过程图Fig.9 Feature extraction procedure
4 系统精度验证
对等速肌张力测试系统精度进行实验验证,首先根据力与力矩之间的正比例关系对系统进行力矩标定,数据处理分析软件获取到的力矩信号为aD值,标定公式如式(1)和式(2),式中k、F、L、TAD、TAD0、T分别表示实际力矩与力矩aD值的比例系数、受力大小、测试点距离运动轴中心线距离、力矩信号AD值、力矩信号零点AD值、实际力矩:

对系统静态条件下进行精度验证,在手臂支撑杆距离运动轴中心线距离为0.4 m处分别加上50 N、100 N、150 N砝码进行连续三次测试,测试数据如表1。
从表1数据可以看出,系统静态测试误差在1 N·m以内,具有较好的测试精度;在系统动态测试精度验证中,我们选取没有任何相关疾病的年轻受试者进行测试,针对受试者的峰力矩测试数据结果显示:系统重复性存在一定误差,约为±1.15 N·m。根据以上测试精度,在临床应用中,对于肌张力增高类型的患者具有较好的区分度,但对于肌张力过低的患者系统目前不能较好的进行区分。造成误差的原因:(1)减速机的回程间隙导致系统在运动的起点和终点处产生抖动干扰;(2)温度、湿度等环境因素导致实验结果受到干扰;(3)受测者主观原因,测试过程中不自觉发力,没有保证全程的被动测试。解决办法:(1)采用回程间隙更小、精度更高的减速机以及安全离合器来减小转动干扰;(2)在数据采集单元中加入消除温度漂移的电路模块等;(3)告知受测者完整的测试步骤,让其保持充分放松状态。

表1 静态测试数据Tab.1 Test data of static
5 总结
本文设计了一种新型等速肌张力测试系统,不仅能够测量帕金森病患者的肌张力,还能实现肌张力测量数据中的峰力矩等特征参数的提取,实现了患者肌张力异常程度的评价,可为临床医师对患者的诊疗评估提供重要参考依据。该系统成本低、结构简单、安全性高。
[1] Maetzler W, Hausdorff JM. Motor signs in the prodrom al phase of Parkinson's disease[J]. Movem Disord, 2012, 27(5): 627-633.
[2] 杨明会, 李敏, 李绍旦, 等. 帕金森患者肌张力的客观定量分析[J]. 疑难病杂志, 2010, 9(11):811-813.
[3] Blackburn M, van Vliet P, Mockett SP. Reliability of measurements obtained with the modifed ashworth scale in the lower extremities of people with Stroke[J]. Phys Ther, 2002, 82(1): 25-34.
[4] Marusiak J, Kisiel-Sajewicz K, Jaskolska a, et al. Higher muscle passive stiffness in Parkinson’s disease patients than in controls measured by myotonometry[J]. arch Phys Med Rehabilit, 2010, 91(5): 800-802.
[5] 徐秀林, 蒋奇永, 严荣国, 等. 基于蓝牙通信的等长肌力测试仪的设计[J]. 中国生物医学工程学报, 2011, 30(6): 897-903.
[6] Zawadzki J, Bober T, Siemienski a. Validity analysis of the Biodex System 3 dynamometer under static and isokinetic conditions[J]. acta Bioeng Biomech, 2010, 12(4): 25-32.
[7] Wright D, Nakamura K, Maeda T, et al. Research and development of a portable device to quantify muscle tone in patients with Parkinsons Disease[c]. Ieee eMBS, 2008: 2825-2827.
[8] 林己,廖一鹏. 基于STM32的伺服电机控制方法研究与设计[J].工业控制计算机, 2013, 26(3): 4-7.
[9] 胡得福.应变式扭矩传感器的设计技术[J]. 船舶工程, 2011,33(4): 96-99.
[10]李健平, 戴子文, 王雪力, 等. 基于oDBc的Visual c++ 应用程序设计[J]. 甘肃科技纵横, 2011, 40(2): 23-24.
[11]谢印忠, 张保洲. Vc++平台下的虚拟仪器应用研究[J]. 计算机测量与控制, 2010, 18(1): 237-239.
[12]王学伟, 张未未. USB-GPIB控制器VISa函数库的开发及在Visual c++中的应用[J]. 电测与仪表,2006, 43(11): 50-53.
[13]黄志平, 尹彦, 刘敏, 等. 等速肌力测试与训练技术的研究进展[J]. 体育科技, 2011, 32(4): 52-58.
Development of Isokinetic Muscle Tone Testing System
【 Writers 】LIU Kun1,2, WANG Xun3, CHEN Wei4, TANG Zheng1, XU Shengqiang1,2, CHENG Nan1,3, WANG Zhen1, YANG Xianjun1
1 Institute of Intelligent Machines, Chinese Academy of Sciences, Hefei, 230031
2 Department of Automation, University of Science and Technology of China, Hefei, 230026
3 Institute of Neurology, Affliated Hospital, Anhui University of Chinese Medicine, Hefei, 230061
4 Sports Science and Technology Research Institute of Anhui Province, Hefei, 230001
【 Abstract 】A new type of isokinetic muscle tone testing system was designed for the Parkinson’s patients with dysmyotonia. The system consists of a mechanical device, a data acquisition unit, and a data processing and analyzing software. The mechanical device comprises an arm supporting device, a safety limiting device and a height adjusting device. Data acquisition unit, composed of a torque sensor module, a motor control module, a data communication module, and so on, is used to control the arm at constant speed and convert the sensor's analog signal into digital signal, then the signal is transmitted to the computer in real-time by USB interface. The data processing and analyzing software, developed by VC++, has fnished the data processing, display, storage, generated the reports, et al. The experimental results show that this system is reliable and safe, not only can evaluate the degree of abnormal muscle tone in Parkinson’s patients, but also can be used in the rehabilitation training of patients with dysmyotonia, which has strong expansibility.
Parkinson, dysmyotonia, isokinetic testing, USB communication
R318.6
A
10.3969/j.issn.1671-7104.2016.03.001
1671-7104(2016)03-0157-04
2015-12-10
国家科技支撑计划(2013BaH14F01);安徽省科技攻关计划课题(1301042215,1501021042)
刘坤,e-mail: kunlaw@mail.ustc.edu.cn
杨先军,e-mail: xjyang@iim.ac.cn
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
全科护理(2022年3期)2022-02-18
中国康复(2021年6期)2021-11-30
今日农业(2020年14期)2020-12-14
中国现代神经疾病杂志(2017年1期)2017-03-29
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
少儿科学周刊·少年版(2015年4期)2015-07-07
中国神经免疫学和神经病学杂志(2014年5期)2014-05-08
