基于离散变频的异步电动机软启动器设计
2016-02-06 01:48马文明宫文展
中国造纸 2016年12期
马文明 宫文展
(1.西京学院, 陕西西安,710123;2.博世力士乐(西安)电子传动与控制有限公司, 陕西西安,710018)
·异步电动机软启动器·

基于离散变频的异步电动机软启动器设计
马文明1宫文展2
(1.西京学院, 陕西西安,710123;2.博世力士乐(西安)电子传动与控制有限公司, 陕西西安,710018)
针对异步电机起动转矩小、起动电流大、且无法起动重载等问题,设计了一种基于离散变频控制方法的软启动器。首先设计了基于三相反并联晶闸管主电路和高性能DSP28335主控制器的软启动器硬件,利用高速A/D实现电流有效值计算。然后分析基于离散变频的软起动控制策略,提出7- 4-3分频之后转工频调压的软起动方法并完成离散变频软件设计。最后通过Matlab仿真和在某造纸厂的制浆车间试验表明,离散变频软起动方法在相同负载率下可以有效降低起动电流,从而验证离散变频的有效性。
异步电机;软启动器;离散变频;电流检测
交流异步电机已大量运用在各行各业中,是迄今为止重要的机电能量转换设备,约占工业电能消耗的60%。然而传统降压软启动器,起动转矩小,只能局限于起动空载或轻载的电机,现代电子式调压软启动器能较为灵活调节电机电压,但电机的起动转矩与电压的平方成正比,调压的同时显著降低了起动转矩,其本质上仍属于降压型软起动。
变频是解决异步电机起动转矩小的直接有效的方法。随着电力电子技术的进步,矢量控制和直接转矩控制[1-3]的高性能变频器已能起动带重载甚至超额定负载的异步电机,但是基于大量功率开关器件的变频器成本较高,难以适用于对调速要求不高的场合。而且变频器输出属于交直交变频,相当于与电网的频率、相位处于隔离状态,在电机完成起动后难以旁路切换到电网,若一直在线运行则增加了变频器的损耗,缩短了其使用寿命。1999年,美国学者Antonio Ginart提出一种基于三相反并联晶闸管的离散变频控制方法[4],在现代电子式软启动器主电路的基础上,通过在电网上有选择的连续导通和关断某些正弦半波而得到正负半波对称导通的变频电压。该变频电压结合相控调压可以实现异步电机的变压变频控制[5],从而达到增大起动转矩,减小起动电流的效果。
基于上述分析,本课题设计了一种基于三相反并联晶闸管的离散变频软启动器。首先设计软启动器硬件电路,以具有强大数值运算和快速逻辑处理能力的高性能DSP28335为主控制器。然后分析离散变频工作原理及其控制器策略,提出离散变频7- 4-3分频之后转工频的软起动方法。最后通过仿真和在某造纸厂的制浆车间验证所设计的离散变频软启动器能增大起动转矩,或在相同负载率下降低起动电流。
1 软启动器控制系统
工业现场环境较为复杂,电磁干扰较强,对软启动器的控制系统稳定性提出了较高的要求。基于高性能DSP28335的控制系统能快速处理起动过程的各种信号,并通过检测电机起动过程的电压、电流等信号快速运算出合适的触发角,从而保证电机的快速平稳起动。
1.1 控制核心DSP28335简介
TMS320F28335数字信号处理器是TI公司新推出的32位、主频为150 MHz的微控制器。该新型DSP增加了浮点运算单元(FPU)和可控的DMA功能,使得数据处理和传输更灵活、速度更快。多达18路的PWM以及6路高精度HRPWM,使得DSP在电机控制领域更有优势。同时,DSP28335的ADC内部基准精度更高,采样误差更小,所采样的数据可直接用于控制回路,从而可以利用高速ADC功能直接采样电流并计算电流有效值。
1.2 软启动器控制系统
异步电机软启动器控制系统以三相反并联晶闸管为主电路,以DSP为核心的控制系统通过实时检测电机起动过程的电压、电流等信号,以电压同步信号过零点为触发角计算基准,按软件算法即可实现包括离散变频在内的多种软起动、软停车和检测与保护功能[6]。软启动器系统框图如图1所示。
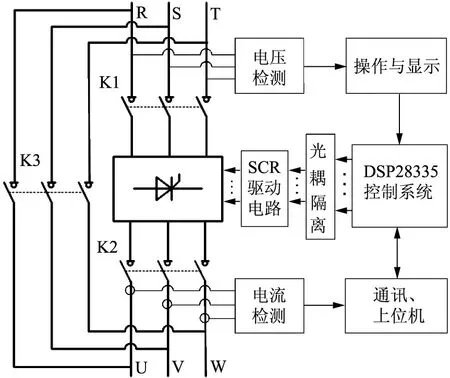
图1 软启动器系统框图
1.3 软启动器部分关键电路设计
软启动器各部分电路组成一个有效的工作系统,任何电路的缺失都会影响到控制系统整体功能的发挥。限于篇幅,本文只介绍部分关键电路。
(1)隔离开关电源
当一个系统同时涉及到强电和弱电时就需要做信号的隔离,也就需要到多路电源分别为各部分电路供电。本课题设计的软启动器只需两路隔离电源为控制系统和晶闸管驱动电路供电。两路隔离开关电源的电路图如图2所示。
图2中左端的交流电源从双抽头变压器取得,经ACDC整流桥后其中一路由开关稳压芯片LM2596-12V稳压到12 V后供晶闸管驱动电路使用,另一路由LM2596-5 V稳压到5 V给逻辑电路供电,5 V电源再经线性稳压芯片ASM1117稳压到3.3 V供DSP的IO口使用,而下面的TPS76801为低衰减的线性稳压器,将5 V电源稳压到1.9 V供DSP内核使用。
(2)基于A/D高速采样的电流有效值检测电路
在交流电流检测方面,一般使用霍尔传感器进行信号的隔离变换后,由取样电阻得按一定比例缩小的电压信号[7- 8]。而霍尔传感器的供电需要正负电源,不利于在此使用。为此设计一种基于DSP高速A/D采样的电流检测电路。首先交流电压有效值(Urms)定义为式(1)。
(1)
式中,T为交流信号的周期,u(t)为交流电压的瞬时值。根据奈奎斯特采用定理对电压u(t)进行等间隔采样,得到一系列的离散电压值,u(1),u(2),u(3)…u(N);利用一个电压周期内采样的N个瞬时值来代替连续变化的函数值。设采样角距为σ,则σ=T/N,对于第i次采样值表示为
求N次采样值平方和的算数平均值记为U,则U为式(2)。
(2)
当N>2时,sinNσ=0,且sinσ≠0。所以有U=Urms,即式(3)。
(3)

图3 三相电压同步信号检测电路
由式(3)可见,当采样频率足够高时,误差很小。利用DSP28335高达80 ns的A/D转换速度不间断采集电流值,并在电机离散变频切换时改变周期时间值,可实现电流的有效值计算。电流检测硬件电路较为简单,以控制系统零电位为基准地,电流经互感器后由取样电阻获得交变的电压信号由DSP的A/D端口直接采样即可。
(3)三相电压同步信号
电源同步信号为晶闸管触发角的计算基准,同时也是软启动器系统计时的来源。三相电压同步信号检测电路如图3所示,由分压电阻直接从电网上分压得到等比例缩小的交流电压信号,利用稳压管D55把交流信号整体上浮5 V便于比较器的比较。同时利用DSP的A/D口从VAL-A、VAL-B、VAL-C采集电网电压幅值,用于软启动器检测与保护。
1.4 控制系统抗干扰性设计
软启动器主要用于工业环境中,受环境中的干扰较多,特别是大功率设备的电磁干扰严重。而电磁干扰导致的后果是系统工作不稳定,或根本无法工作。系统抗干扰性设计一般分为硬件抗干扰和软件抗干扰,硬件上一般通过在器件附近或关键信号上增加滤波、耦合电容来吸收干扰。软件上可以采用抵消的方法消除特定的干扰,但是对于不可预见的干扰则主要表现为软件上的保护,当有错误出现时通过软件看门狗或自定义的保护程序及时封锁触发脉冲或复位控制系统。
2 离散变频原理及其实现
2.1 离散变频的原理
离散变频是通过在正弦电网上有选择地连续导通和关断几个正弦正半波或负半波而得到新的变频电源[9-11]。因为电网周期为50 Hz,由此得到的离散频率只能是50/nHz,其中分频级数n=1、2、3…为整数。图4所示为离散变频7分频电压导通波形。

图4 离散变频7分频电压导通波形图
理论上基于电网固定40 Hz的离散变频可以实现n=1、2、3…的整数分频[12],但有些分频并不能稳定运行,甚至会使电机产生反向电磁力矩。因为电机三相电压互差120°才能形成稳定的磁场,对于离散变频也同样适用,则有式(4)、式(5)。
(4)
(5)
所以,分频系数v=1、4、7…时获得正序电压,表现为正向电磁转矩。同理分析得v=2、5、8…时为负序电压,产生反向电磁转矩;v=3、6、9…时的分频为不对称电压,兼具正反电磁转矩。
2.2 离散变频的控制实现
由前面分析,离散变频在正序电压下才能获得正向电磁转矩,本课题利用7- 4-3分频实现离散变频的软起动和切换,并在转工频电网的时候加斜坡升压以减小转矩波动,最终完成电机的完全起动。如图5为在7分频的基础上、根据对称分量法获得的离散变频4分频的三相电压导通波形。
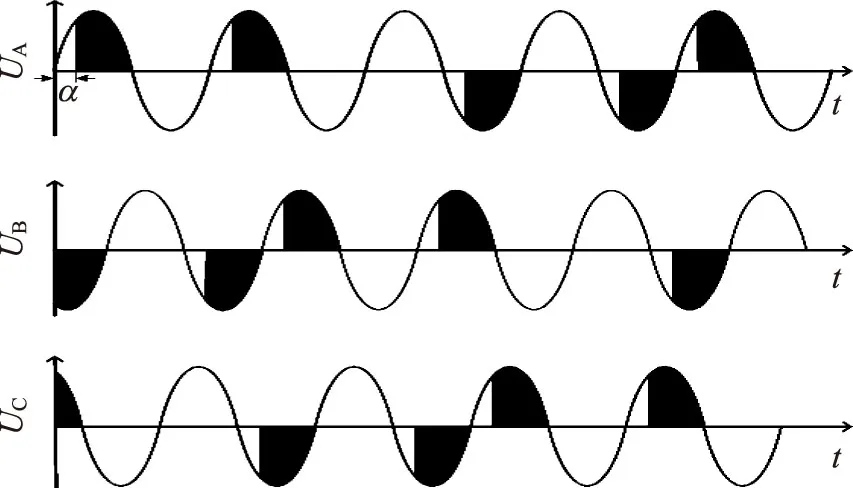
图5 离散变频4分频电压导通波形
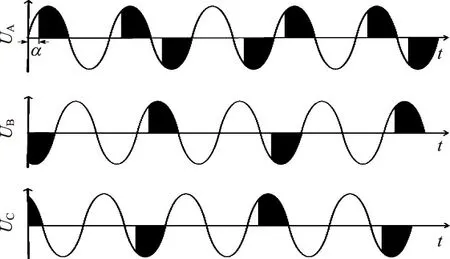
图6 离散变频3分频电压导通波形
图6为离散变频3分频电压导通波形图。图6中3分频为不对称电压,但是3分频的3次谐波正好为50 Hz且相互抵消,所以正向电磁转矩较大,带载能力较强。
离散变频从7分频起动后需要切换到下一级频率,各级频率间的切换有:ⓐ整周期运行完后切换;ⓑ周期内选择合适的时间切换。考虑到离散变频的3分频为不对称分频,文中选择在各级频率整周期运行完之后切换。3分频即16.7 Hz之后若直接按v/f控制切换到工频50 Hz,则由于电压和频率的突然增大,引起电流陡然增大,转矩瞬间变化过大,容易导致电机起动失败。所以在3分频切换到工频时适当降低电压,然后由斜坡升压起动完成。
3 离散变频软件设计
完成基于DSP的离散变频硬件电路设计,在此基础上设计离散变频软起动程序。根据离散变频控制原理,其在实现变频的基础上通过调节触发角α的大小可以保持电机主磁通基本能恒定,从而避免出现过大的转矩脉动。程序设计原理如图7所示。
由图7可知,电机首先从零速开始起动到7分频的额定转速,运行时间为0~t7;4分频运行时间为t7~t4;3分频运行时间为t4~t3;离散变频转工频斜坡升压运行时间为t3~t1。程序流程如图8所示。

图7 离散变频程序设计原理

图8 离散变频程序流程图
离散变频用于电机软起动,工作时间短,一般以开环运行为主。首先系统上电自检,检测无错误之后设置离散变频分频起动电压和级数,每一级频率只在对应的时间内运行,运行完成之后会自动切换到下一级离散频率并改变触发角以保持电机主磁通基本恒定。在3分频运行完成之后系统会自动切换到工频斜坡升压完成电机的起动。
4 仿真与试验结果分析
4.1 仿真结果
利用一台15 kW的三相异步电机设计基于Matlab/Simulink的离散变频软起动仿真。电机首先从7分频开始起动,在电机达到稳定时切换到4分频运行,同时按U/f控制规律适当增大电压。同理,4分频运行稳定到切换到3分频。3分频云稳定后直接切换到工频时为减小冲击电流适当降低电压,然后按斜坡升压完成异步电机的起动。离散变频软起动和直接起动仿真过程如图9和图10所示。
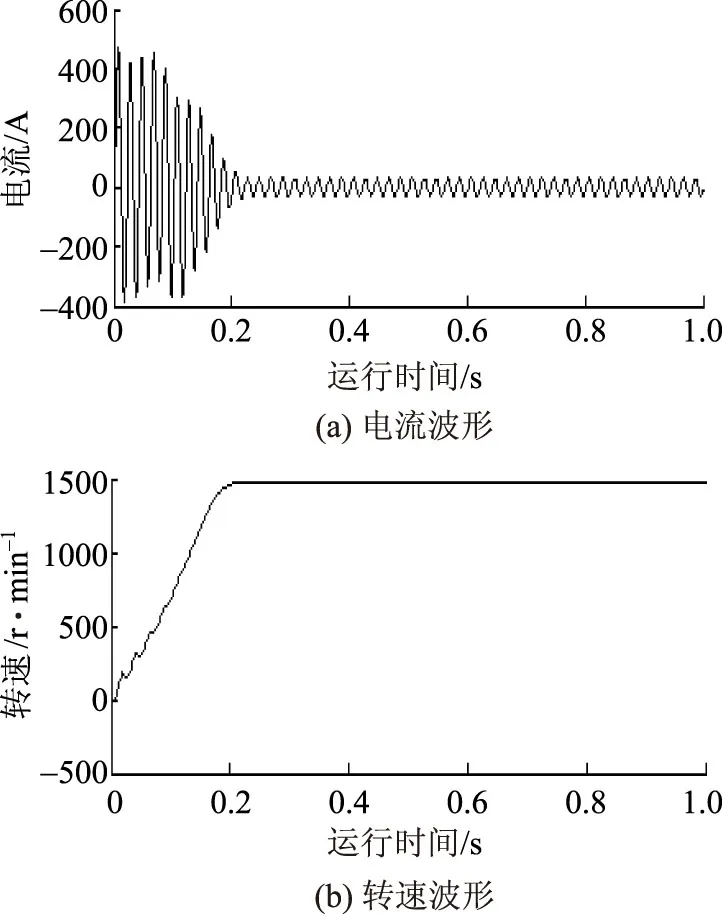
图9 异步电机直接起动波形图
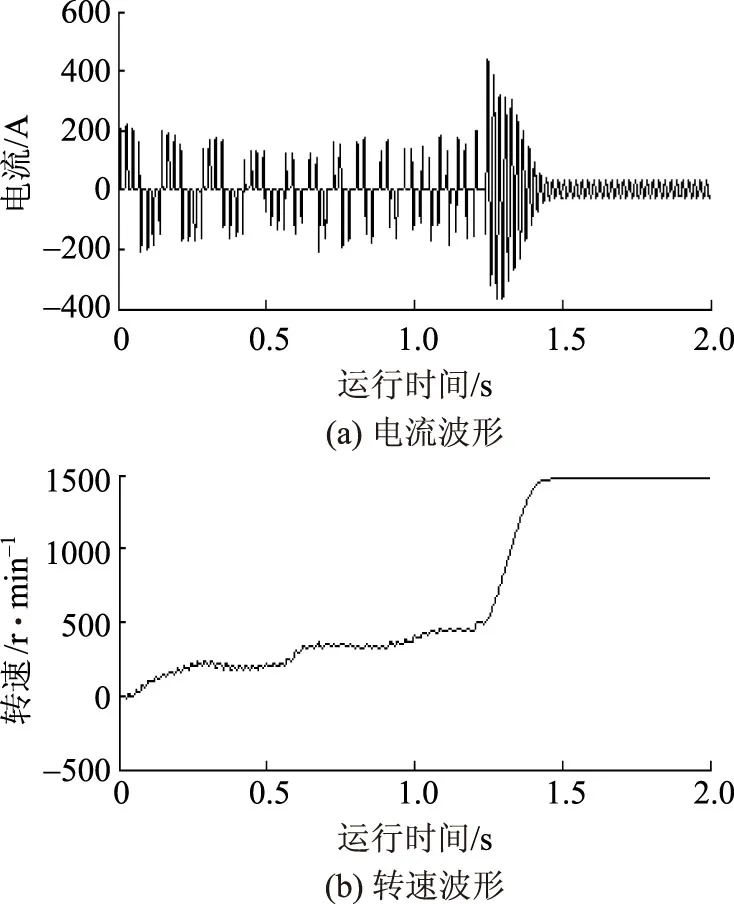
图10 异步电机离散变频起动波形图
图10中离散变频7分频运行时间为0~0.56 s,4分频运行时间为0.56~0.96 s,3分频运行时间为0.96~1.2 s,斜坡升压运行时间为1.2~1.5 s。从中可看出离散起动电流较小,电机初始转速较为平滑,频率切换过程无明显电流冲击,转斜坡升压时电机加速良好。相比于异步电机的直接起动的电流有明显的减小,起动转速更加平滑。
4.2 试验结果分析
利用制浆车间15 kW异步电机,完成离散变频软起动试验。设定负载为50%时的试验电流和转速波形如图11所示。

图11 异步电机离散变频试验波形
从图11可见,电机在离散变频过程因为周期变长,电流有效值较小,而且在离散频率7分频切换到4分频的过程电机加速明显,电流反而有效减小。4分频切换到3分频时同样加速明显,但考虑到3分频的不对称性,其运行时间较短。3分频之后快速切换到工频50 Hz的斜坡升压完成电机起动过程。从中可见,整个过程最大电流出现在斜坡升压阶段,离散变频能有效减低起动电流。
5 结 语
本课题基于高性能的DSP28335设计了一种具有离散变频功能的软启动器,利用DSP的高速A/D实时采集电流并计算有效值,同时在检测同步信号时实现电压检测,节省了研制成本。通过分析离散变频原理,提出了一种7- 4-3分频之转斜坡升压方法,利用整周期之后切换离散频率实现了频率的无扰切换,减小了电流冲击。最后通过仿真和在制浆车间试验,验证了设计的离散变频软启动器在相同的负载率下能有效降低电动机起动电流。
[1] LU Hua-lin. Study of the induction motor vector control variable frequency speed regulation system[D]. Wuhan: Wuhan University of Technology, 2010. 吕华林. 异步电机矢量控制变频调速系统的研究[D]. 武汉: 武汉理工大学, 2010.
[2] HU Hong-ming, YUAN You-xin, MAO Cheng-xiong. Design of soft starter based on the classification of AC frequency conversion[J]. Journal of Wuhan University of Technology, 2011(2): 136. 胡红明, 袁佑新, 毛承雄. 基于分级交交变频的软起动器的设计[J]. 武汉理工大学学报, 2011(2): 136.
[3] LIU Yong, TANG Jian-guo. Application of Soft Start in Paper Ma-chine Beating Control[J]. China Pulp & Paper, 2008, 27(4): 70. 刘 勇, 唐建国. 软启动器在纸机打浆控制中的应用[J]. 中国造纸, 2008, 27(4): 70.
[4] Ginart A, Esteller R, Maduro A, et al. High starting torque for AC SCR controller[J]. IEEE Transactions on Energy Control, 1999, 14(3): 553.
[5] ZHAO Kai-qi, WANG Yi, XU Dian-guo. A new strategy to improve the starting torque of the induction motor controlled by thyristor[J]. Chinese Journal of Electrical Engineering, 2004, 24(3): 145. 赵凯岐, 王 毅, 徐殿国. 晶闸管控制的感应电机中提高起动电磁转矩的一种新策略[J]. 中国电机工程学报, 2004, 24(3): 145.
[6] Nied N, De Oliveira J, De Farias Campos R, et al. Soft Starting of Induction Motor With Torque Control[J]. IEEE Transactions on Industry Application, 2010, 46(3): 1002.
[7] LIU Gang, CHEN Shu-xin, LUO Wei-dong. Non-sinusoidal motor supply voltage True RMS single-cycle synchronous sampling[J]. Journal of Electrical and Control, 2014, 18(1): 112. 刘 刚, 陈树新, 罗维东. 电机非正弦供电电压单周期真有效值同步采样[J]. 电机与控制学报, 2014, 18(1): 112.
[8] YANG Yun-sen, TANG Juan, REN Xiao-gang. Based on the DSP control system of asynchronous motor rotor flux[J]. Micro &special motor, 2015, 43(1): 65. 杨云森, 唐 娟, 任晓刚. 基于DSP的异步电动机转子磁链定向控制系统[J]. 微特电机, 2015, 43(1): 65.
[9] LI Dong-hui, WU Hao, DUAN Ke-liang. Based on discrete variable frequency technology of motor overload soft starting system[J]. Journal of Tianjin University: Natural Science and Engineering, 2009, 42(6): 471. 李冬辉, 吴 昊, 段克亮. 基于离散变频技术的电机重载软起动系统[J]. 天津大学学报: 自然科学与工程技术版, 2009, 42(6): 471.
[10] MENG Yan-jing, ZHANG Yan. Based on the LOGO “One to Two” the Implementation of the Soft Start Control System[J]. China Pulp & Paper, 2014, 33(12): 42. 孟彦京, 张 焱. 基于LOGO的“一拖二”软启动控制系统的实现[J]. 中国造纸, 2014, 33(12): 42.
[11] MENG Yan-jing, GAO Xiao-xiao, LI Lin-tao. Based on the Soft Starter of STM32 Program Design[J]. Electronic devices, 2013, 36(5): 685. 孟彦京, 高筱筱, 李林涛. 基于STM32的软起动器程序设计[J]. 电子器件, 2013, 36(5): 685.
[12] SHE Zhi-ting, PI Yu, ZHOU Mi-yang. Discrete Variable Frequency Induction Motor of High Torque Soft Starter[J]. Electric Drive, 2010, 40(3): 17. 佘致廷, 皮 玉, 周米洋. 感应电机离散变频高转矩软启动器的研究[J]. 电气传动, 2010, 40(3): 17.
(责任编辑:常 青)
The Design of Asynchronous Motor Soft Starter Based on Discrete Variable Frequency
MA Wen-ming1,*GONG Wen-zhan2
(1.XijingUniversity,Xi’an,ShaanxiProvince, 710123;2.BOSCHRexroth(Xi’an)ElectronicTransmissionandControlCo.Ltd.,Xi’an,ShaanxiProvince, 710018)(*E-mail: 987746606@qq.com)
Aiming at the problems of asynchronous motor such as small starting torque, large starting current and can not starting heavy-load, a soft starter based on discrete variable frequency control method was designed. Firstly, the hardware of soft starter based on three-phase anti parallel thyristor main circuit and high performance DSP28335 was designed, the calculating the effective value of current using high speed A/D was realized. Then, the soft start control strategy based on discrete variable frequency was analyzed, the soft starting method of 7- 4-3 frequency division to power frequency voltage regulation was presented and the discrete frequency software design was completed. Finally, the Matlab simulation and experimental results showed that the discrete variable frequency soft start method could effectively reduce the starting current at the same load rate, the efficiency of discrete frequency conversion was verified.
asynchronous motor; soft starter; discrete variable frequency; current-sensing
2016- 06- 03(修改稿)
西京学院科研基金项目(XJ150213)。
马文明先生,硕士,助教;研究方向:电力电子与电力传动,电机控制与变频调速。
TM301;TS736
A
10.11980/j.issn.0254- 508X.2016.12.010
猜你喜欢
内蒙古电力技术(2021年5期)2021-11-21
莆田学院学报(2021年5期)2021-11-13
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
铁道通信信号(2020年12期)2020-03-29
速读·下旬(2019年3期)2019-04-11
资源节约与环保(2018年1期)2018-02-08
电子制作(2017年8期)2017-06-05
质量技术监督研究(2015年1期)2015-04-09
汽车电器(2014年2期)2014-12-02