
具有防翻转功能爬楼小车的设计与性能研究
2016-01-29 03:52王琳刘军胡碧波
机械制造与自动化 2015年4期
王琳,刘军,胡碧波
(大连科技学院,辽宁 大连 116052)
具有防翻转功能爬楼小车的设计与性能研究
王琳,刘军,胡碧波
(大连科技学院,辽宁 大连 116052)
摘要:设计一款具有防翻转功能的爬楼小车,将传统的端面棘轮机构进行了巧妙的变形设计,应用于爬楼小车爬行中防翻转的单方向制动装置,由手动操纵线闸完成。通过运动仿真,针对小车爬楼梯过程进行了受力分析和运动学分析,优化了爬楼小车的结构,对提高爬楼小车的安全性具有应用价值。
关键词:爬楼小车;端面棘轮;防翻转;运动学分析
Design and Performance Study of Upstairs Cart with Anti-reverse-rotation
Function
WANG Lin,LIU Jun,HU Bibo
(Dalian Institute of Science and Technology, Dalian 116052, China)
Abstract:This paper designs an upstairs cart with anti-reverse-rotation. Its modified design is derived from the traditional facing ratchet-wheel organization. It is applied to the unidirectional brake system which is used to prevent the upstairs cart from rolling back. This device is operated by the manual calliper brake. The upstairs cart structure is optimized through the motion simulation and the analysis of motion and force. It is very important to improve its safety performance.
Keywords:upstairs cart; facing ratchet-wheel; anti-reverse-rotation; analysis of motion
0引言
目前,人们在购物时普遍使用一种手拉小车,它方便、省力、占地面积小。在设计之初,第一代手拉购物小车是两轮的,适合走平地和上下坡。后来,为了满足人们拉车上楼梯的需求,购物小车由原来的两个小轮改为了两个三脚轮。其中,每个三脚轮是由三个同圆周均匀分布的小轮与一个三脚架镶嵌而成。在上楼梯的过程中,三脚轮因受外力作用而绕车轴旋转,以达到“爬”楼效果。但通过研究发现,此类小车在功能上仍存在一定的欠缺,比如,工作可靠性问题。在拉购物小车爬楼梯的过程中,人的双腿一直在做连续地循环运动。当只有一条腿着地时,可能因后方购物小车过重引发三脚轮逆转,最终使人失去平衡而摔倒。由此考虑到对爬楼小车增设手动制动反转装置,即在中心车轴上加上一个变形的端面棘轮机构,使在上楼梯时三脚轮只能单向旋转,一旦要发生逆转时可及时制动,避免危险[1]。文中阐述如何把端面棘轮机构应用于爬楼小车的结构设计,并研究了棘轮的使用性能。
1爬楼小车的设计
1.1爬楼小车的整体设计
目前,市场上销售的爬楼小车仍在不断地改进。比如折叠车架、车轴材质的改变,使其承重性更好,车身更稳;车轮材质的改进,使其噪音更小,更耐磨;购物袋的改进,使其容量更大,结实耐用,可拆洗等等。综合以上的考虑,研究设计了一款美观、实用,具有防翻转功能的爬楼小车,其整体外观如图1所示。

图1 爬楼小车的整体设计
1.2传统爬楼小车受力分析
传统三脚轮爬楼小车在上楼时会经历三个阶段,即平地前进阶段,竖直上升阶段,翻滚跨越阶段,如图2所示。

图2 爬楼小车上楼梯的三个阶段
在平地前进阶段,人施加的拉力主要是用来克服摩擦力,并使小车继续前行。
在竖直上升阶段,人所提供的拉力主要用于克服车的总质量以及垂直面的内力消耗。
在翻转跨越阶段,具体受力分析如图3所示[2]。
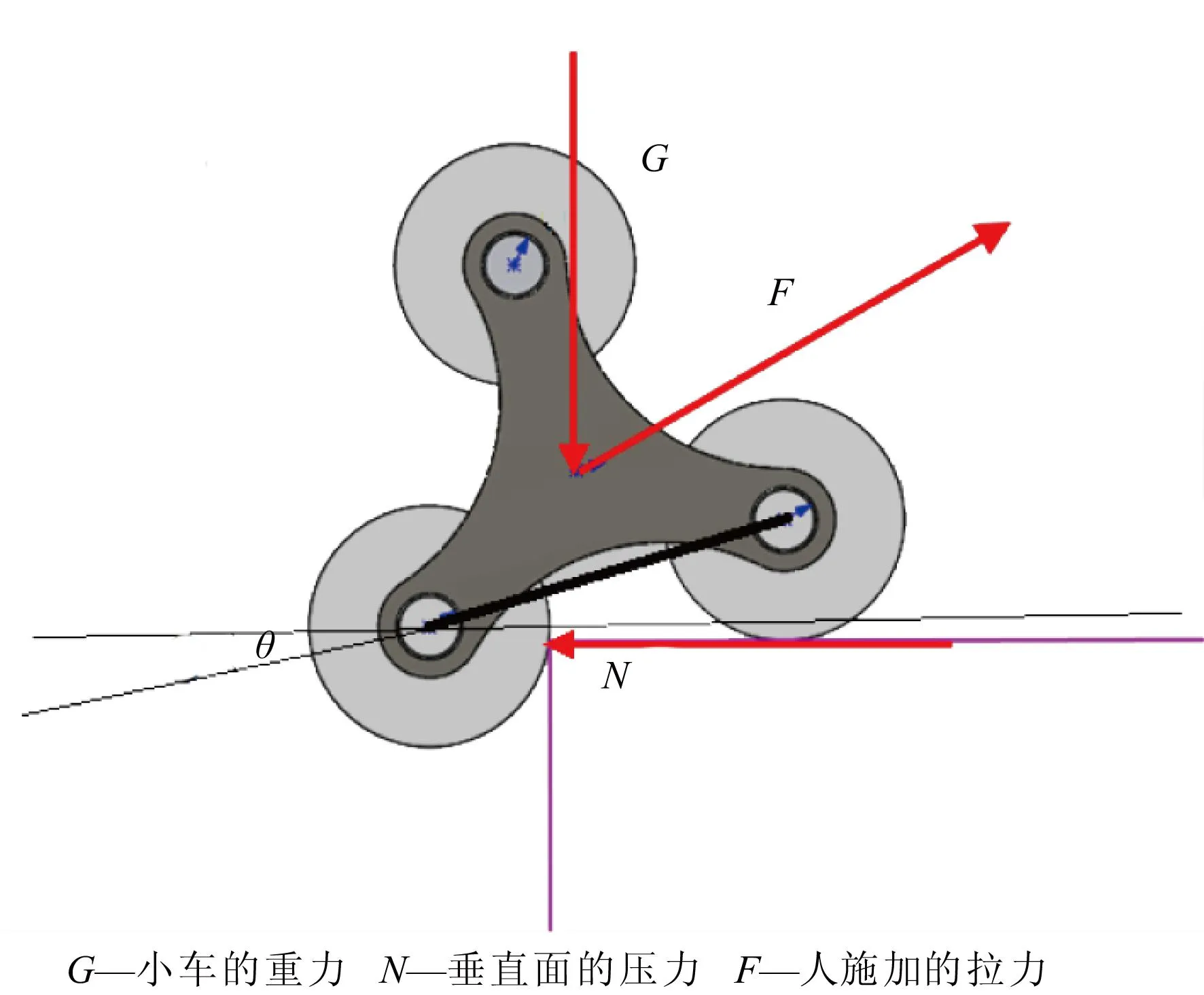
图3 翻转跨越阶段的受力分析

(1)
且:
(2)

(3)

如果人手施力不满足上述条件,小车就会发生逆转,而如果此时在手动位置设计一防翻转的单方向制动装置,即可避免危险发生。
1.3棘轮机构的结构设计
考虑到在人手拉动小车爬行楼梯过程中,由于人车整体质心不稳会带来翻转的现象发生,将棘轮机构引入三脚轮的制动装置中。同时,考虑到如果选用内齿式棘轮机构,结构将会受到三脚架尺寸的制约,其强度不能满足要求,工作可靠性难以保证,所以最终选用的是端齿式棘轮机构。
常见的棘轮齿形有:矩形和对称梯形,用于双向式棘轮机构;不对称梯形,用于承受载荷较大的场合;三角形或圆弧形,用于承受载荷较小的场合[3]。现设计所采用的齿形为三角形,其结构和形状如图4、图5所示[4]。


图4 端面棘轮机构的结构

图5 端面棘轮形状
在进行棘轮尺寸设计时,综合考虑了在上楼梯过程中三脚架中心部位与台阶不能产生干涉以及需要合理安装的因素,即中心棘轮的半径R与小轮半径r、车轴轴心到小轮中心的距离L大小具有一定的几何关联,简化后如图6所示。

图6 几何关系简化图
利用台阶刚好接触到三脚架最内侧点这一极限位置的角度关系,可以确定L、R、r之间的关系:
(4)
所以得出:
(5)
端面棘轮机构的主要失效形式是轮齿的折断和结合面的挤压磨损。设计尺寸时,应以牙根抗弯能力作为强度指标,再经抗挤压校核[5]。
1.4棘轮机构的控制设计
棘轮机构的控制装置部分是以自行车的刹车线作为力的传动装置,从手柄位置控制卡齿的脱开和接合,最终达到控制棘轮的目的[6]。当卡齿被拉离时,中心棘轮可自由转动;当卡齿在复位弹簧的推力作用下逐渐恢复原位时,中心棘轮仅能作单向转动。其具体结构和形状如图7-图8所示[7]。
图7 棘轮机构的结构

图8 棘轮机构的形状
2爬楼小车的运动学分析
为了缩短设计周期,提高设计质量,采用三维软件对该爬楼小车棘轮机构装置进行了三维实体造型、虚拟装配和机械传动的动态仿真[8],并对运动学仿真结果进行分析[9]。
对小车手动操纵部分分别施加了水平和垂直方向的驱动力和相应的作用时间,经过多次反复仿真,力求尽量模拟爬楼的真实过程,抓取了小车爬行楼梯过程中的轨迹,如图9所示。从图中可以看出,在经过第一个楼梯台阶时出现了轨迹的突变现象,与实际情况相符,而后续轨迹成循环状态[10]。

图9 爬楼梯轨迹图
在上述的爬楼轨迹下,进行了运动学分析,得到小车的x轴向位移和y轴向位移,如图10、图11所示。

图10 x轴向位移

图11 y轴向位移
从图中可以看出,在运行到0.65s之前的时间段属于小车的初始状态,其位移有突变,之后随着台阶的跨越呈现周期性规律性变化。
最后,得到小车的x轴向速度和y轴向速度,如图12、图13所示。

图12 x轴向速度
从图中可以看出,在运行到1.95s之前的时间段小车速度略有起伏,之后随着台阶的跨越呈现周期性规律性变化。
所得到小车的x轴向加速度和y轴向加速度,如图14、图15所示。

图14 x轴加速度

图15 y轴加速度
从图中可以看出,整体加速度趋于稳定,只是在跨越台阶处出现了较大的突变,加速度数值大小反映了小车惯性力的大小,也体现了小车对台阶的冲击作用。很明显,y轴方向的冲量远远大于x轴向的冲量,完全符合实际的受力情况。
3结语
将传统的端面棘轮机构采用了巧妙的变形设计,应用于小车爬行中防翻转的单方向制动装置,并通过手动操纵线闸来完成,最终设计出一款具有防翻转功能的爬楼小车。通过三脚轮爬行楼梯过程的运行轨迹和受力分析,在保证尽可能小尺寸的情况下,设计了小车带有防翻转制动的齿形棘轮结构和几何尺寸。通过运动仿真,针对小车爬楼梯过程进行了受力分析和运动学分析,优化爬楼小车的结构,对于提高爬楼小车的的安全性能具有重要意义。
参考文献:
[1] 殷鸿梁,朱邦贤. 间歇运动机构设计[M]. 上海:上海科学技术出版社,1996.
[2] 北京科技大学,东北大学编. 工程力学[M]. 北京:高等教育出版社,2008.1.
[3] 孙志礼,等. 机械设计[M]. 沈阳:东北大学出版社,2000.
[4] 杨卫南. 端面棘齿的齿形参数计算[J]. 现代制造工程,2000,(10):36-36.
[5] 成大先. 机械设计手册[M]. 北京:化学工业出版社,2004.
[6] 王珍华,付微,赵立德. 牙嵌式电磁离合器的设计与计算[J].一重技术,2003,(4):8-11.
[7] 汪健,王树林. 基于UG的波浪形棘轮参数化设计[J]. 机械制造与自动化,2012,41(3):120-122.
[8] 赵建勋,代菊英,黎聪. 基于Pro/E的简单机构运动仿真及应用[J]. 机械制造与自动化,2012,41(1):128-130.
[9] 候凤国,田杨. 基于Workbench的某牛头刨运动学分析[J]. 机械制造与自动化,2012,41(3):77-78.
[10] 王洪欣,冯雪君. 机械原理[M]. 南京:东南大学出版社,2007.


收稿日期:2015-03-25
中图分类号:TP273
文献标志码:B
文章编号:1671-5276(2015)04-0194-04
作者简介:王琳(1980-),女,辽宁本溪人,讲师,硕士研究生,研究方向为机械设计CAD、CAE方向。
