
基于CAN通信的AMT离合器控制策略研究
2016-01-29 05:13:38马涛李守成李小龙李占江
机械制造与自动化 2015年4期
马涛,李守成,李小龙,李占江
(1. 南京理工大学,江苏 南京 210094; 2. 南京越博汽车电子有限公司,江苏 南京 210091)
基于CAN通信的AMT离合器控制策略研究
马涛1,李守成1,李小龙1,李占江2
(1. 南京理工大学,江苏 南京 210094; 2. 南京越博汽车电子有限公司,江苏 南京 210091)
摘要:为满足机械式自动变速器(AMT)对整车动力传动系统协调控制的需要,分析了基于SAE-J1939标准的发动机控制报文,设计了AMT控制器(TCU)与发动机控制器(ECU)通过CAN总线进行协调控制的控制方法,根据换挡过程中的不同状态建立了对应的发动机控制策略,并进行了整车试验。试验表明,该控制方法可满足AMT系统换挡过程中对发动机进行协调控制的需求,与发动机协调配合的平顺换挡。
关键词:发动机;AMT离合器;CAN总线;控制策略
Research on AMT Clutch Control Strategy Based on CAN Communication
MA Tao, LI Shoucheng, LI Xiaolong, LI Zhangjiang
(1. Nanjing Universily of Science and Technology, Nanjing 210094, China;
2. Nanjing Read Bo Autometice Electrones Co, Ltd. Nanjing 210091, China)
Abstract:In order to meet the AMT’s needs for engine coordinated and control, an analysis of SAE J1939 CAN communication message is done and AMT and engine control system is designed based on CAN bus. According to the method , control strategies which are used to deal with different situations are built and tested. Experiment indicates that this control strategy can meet the needs for AMT system and make the shifting process smooth and rapid.
Keywords:engine; AMT clutch; CAN bus; control strategy
0引言
机械式自动变速器(AMT)具有结构简单、成本低、传动效率高的优点,可以利用现有手动变速器进行升级改造,适用于对成本敏感的微型乘用车和商用车 。
相比AT、CVT等变速器,发动机协调控制在AMT换挡过程中更加重要。目前TCU控制发动机的方法主要有两种:1) 通过直接调节发动机节气门或外部强制断油来实现发动机扭矩协调控制的方法;2) 通过通信协议将控制命令发送至ECU完成转速和扭矩控制。前者TCU不能充分利用发动机喷油量和点火提前角的修正功能,所以无法实现对发动机的快速精确控制。随着发动机控制协议和功能的逐渐开放,换挡过程中基于CAN通信的发动机转速、扭矩控制已成为趋势[1]。在 AMT 系统中引入 CAN 总线技术,实现 TCU与车上其他电子控制单元的通信,可以更加高效的实现各系统间协调控制和数据共享、降低整个系统的成本[2]。文中提出了一种利用TCU和发动机ECU通过CAN通信进行协调控制的换挡控制策略,并进行了试验验证。
1发动机的CAN通信控制
AMT换挡前后需要对发动机进行实时的扭矩、转速控制,以达到平顺换挡与延长离合器寿命的目的。
非换挡时刻,发动机由ECU控制,当TCU判断车辆行驶状态满足换挡要求时,通过CAN通信介入发动机控制。根据J1939通信协议,传动系统对发动机的控制方式有转速控制和扭矩控制两种,同时TCU可接收ECU向总线发出的发动机扭矩、转速、水温等信息[3],来修正对发动机和离合器的控制。传动系统对发动机的转速、扭矩请求报文如表1所示。

表1 TSC1TE报文定义
TCU通过CAN协议中的TSC1TE报文来控制发动机扭矩、转速,override control mode priority为控制模式优先级,定义如下:
00:最高优先级;
01:高优先级;
10:普通优先级;
11:低优先级。
当TCU需要介入发动机控制时,将优先级提高,使得总线上其他控制器在保证行车安全的情况下让出控制权。
Override control mode为TCU请求的发动机控制模式,TCU根据需要可选择:
00:禁用;
01:转速控制——控制发动机转速调节至目标转速;
10:扭矩控制——控制发动机扭矩调节至目标扭矩;
11:转速/扭矩限制控制——根据TCU请求限制发动机转速或扭矩输出。
当TCU的控制请求优先级为总线上最高时,发动机ECU开始响应TCU控制,TCU根据离合器控制策略,对离合器执行机构和发动机进行协调控制。根据控制模式的不同,ECU控制目标值为报文中的Requested speed/speed limit 或Requested torque/torque limit的数值。
2AMT与发动机的联合控制策略
a) 分离离合器阶段的联合控制
为缩短换挡时间,离合器的分离速度应尽可能提高,同时也要注意发动机的联合控制,防止加载在发动机曲轴上的负载突然卸下后发动机飞车。此阶段使用发动机扭矩配合离合器分离控制来达到这一目的。
由于离合器传递扭矩和离合器位移存在非线性关系,在发动机降扭过程中,离合器的位移需要根据发动机的实际扭矩调整。文中采用的策略是,发动机降扭矩与离合器分离同时进行,当发动机到达目标扭矩的同时,离合器分离至滑摩点。
b) 改变挡位阶段的联合控制
由于AMT系统换挡时间很短,可认为换挡前后车速保持不变[4]。为减小换挡后的转速差,TCU需利用离合器从分离到接合至滑摩点这一时间段进行发动机转速控制。目前通过通信对发动机进行转速控制的方法有两种,1) TCU通过请求发动机扭矩间接达到控制发动机转速的目的;2) 是TCU直接请求发动机转速,由ECU自行实现转速控制。现采用2)方式对发动机转速进行控制。
由于变速器改变挡位有不同工况,故发动机转速控制也应有相应的控制策略。在正常升挡情况下,以输入轴转速为目标转速,减少离合器滑摩时间,提高换挡舒适性。KickDown降挡工况下,以输入轴转速为目标转速,并根据油门开度进行修正。适当提高发动机转速,以便合理利用离合器滑摩作用,尽快传递发动机扭矩,减少动力中断时间。发动机转速计算模块如图1。

图1 改变挡位阶段发动机转速控制模块
c)离合器接合阶段联合控制策略
离合器接合阶段的控制目标是,在保证冲击度不大于规定限值的同时尽可能减少接合时间,使车辆具有良好的平顺性和动力性。为此,转速调节切换至扭矩调节后,发动机目标扭矩以通过CAN总线获得的发动机实际扭矩为初始值进行扭矩控制。
在离合器接合阶段,扭矩模式控制发动机。目标扭矩值以驾驶员请求扭矩和发动机时间扭矩为参考,同时根据油门踏板开度进行扭矩增量的修正。发动机扭矩增量计算模块如图2。
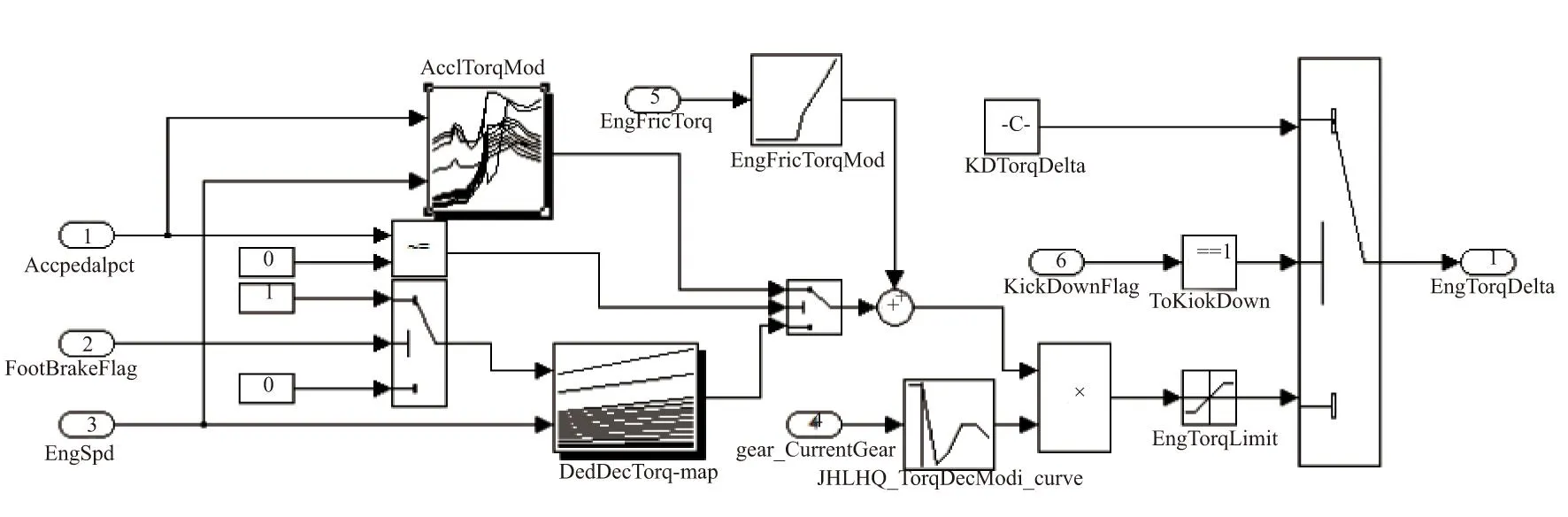
图2 接合阶段发动机扭矩增量控制模块
3试验结果
基于某自主品牌手动挡车型开发了AMT样车,该样车基本参数如表2。

表2 试验样车基本参数
采用文中的执行机构和控制策略,完成了TCU控制软件开发和初步标定。图3、图4分别是40%和100%油门踏板开度下发动机协调控制试验结果。

图3 40%油门开度时二挡升三档时发动机响应曲线
TCU根据车辆行驶信息判断需要换挡时,首先进行发动机扭矩控制,图中在发动机控制模式由0转换为1时,系统进入该控制模式,TCU根据离合器分离的位置,计算出请求发动机扭矩并发送至CAN总线,发动机ECU接收到该扭矩命令后,调节使发动机实际输出扭矩跟踪TCU请求扭矩。
离合器分离完成后,AMT进入选换挡阶段,图中发动机控制模式由1转换为2,此时发动机进入转速控制模式,目标转速为输入轴转速。发动机根据CAN线上TCU的转速命令进行转速控制。
当选换挡执行机构的动作结束并且发动机和输入轴转速差小于设定界限后,离合器开始接合。此时发动机控制模式由转速模式转为扭矩模式,并根据TCU的扭矩命令逐渐提升扭矩并协调离合器,完成离合器接合动作。
离合器完全接合后,整个换挡过程结束,TCU退出发动机控制模式,ECU根据车辆实际工况对发动机进行控制。
图4 100%油门开度时三挡降二挡发动机响应曲线
当驾驶员深踩油门踏板时,说明其对车辆动力性有较高要求,为使车辆有更高的加速度,此时需要根据换挡MAP图进行降挡,使发动机提高转速工作在扭矩最大的区间内。 图4中可看出,通过发动机在换挡期间的转速控制,有效减少了离合器接合时的转速差;在离合器分离和接合阶段的扭矩控制,对保持发动机工作的稳定性具有良好效果。
4结语
目前,AMT系统的主要难点之一即为发动机和AMT系统的协调控制。通过对发动机—变速箱CAN通信的分析,设计了基于CAN通信的发动机控制方法,试验表明,该方法可实现AMT和发动机的协调控制,并取得了良好效果。
参考文献:
[1] 谢先平,梅近仁,李君,等. 基于发动机联合控制的AMT换挡控制策略[J]. 汽车技术, 2012, 441(6): 28-31.
[2] 蔡威威, 刘文忠, 陈勇. 基于 MC9S12XEP100 的 DCT 控制器设计[J]. 拖拉机与农用运输车, 2012, 39(001): 33-36.
[3] SAE . 71,(R) Vehicle Application Layer-J1939-71 (through 1999)[J]. 1999:66-69.
[4] 叶明, 秦大同, 刘振军. 轻度混合动力 AMT 汽车动力性换挡规律研究[J]. 汽车工程, 2006, 7: 671-675.


收稿日期:2014-01-20
中图分类号:TK44
文献标志码:A
文章编号:1671-5276(2015)04-0149-03
作者简介:马涛(1986-),男,山东临沂人,硕士研究生,主要从事汽车电子控制单元方向的研究。
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
民用飞机设计与研究(2019年2期)2019-08-05 01:33:40
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
现代商贸工业(2016年21期)2016-12-26 16:03:01
现代电子技术(2016年22期)2016-12-26 15:41:20
电子技术与软件工程(2016年22期)2016-12-26 11:11:30
科技视界(2016年18期)2016-11-03 22:53:48
通信电源技术(2016年1期)2016-04-16 04:57:26
汽车与新动力(2015年1期)2015-02-27 12:11:01
