
空间机械臂关节力矩传感器的研制
2016-01-28 05:10侯鹏飞刘伊威谢宗武
机械与电子 2015年7期
关键词:弹性体
侯鹏飞,刘伊威,谢宗武
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150001)
Development of Joint Torque Sensor on Space Manipulator
HOU Pengfei, LIU Yiwei, XIE Zongwu
(State Key Laboratory of Robotics and System, Harbin Institute of Technology,Harbin 150001,China)
空间机械臂关节力矩传感器的研制
侯鹏飞,刘伊威,谢宗武
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150001)
Development of Joint Torque Sensor on Space Manipulator
HOU Pengfei, LIU Yiwei, XIE Zongwu
(State Key Laboratory of Robotics and System, Harbin Institute of Technology,Harbin 150001,China)
摘要:为了实现空间机械臂的主动柔顺控制,成功研制了一种基于电阻应变原理的新型关节力矩传感器。该传感器采用轮辐式弹性体设计,具有机械过载限位保护和温度补偿等功能。通过ANSYS软件的有限元分析,验证了其结构设计的合理性和良好的线性特性。对力矩传感器进行标定实验,结果表明其静态指标满足设计要求。
关键词:电阻应变;力矩传感器;弹性体;迟滞
中图分类号:V476.5;TP241
文献标识码:A
文章编号:1001-2257(2015)07-0077-04
收稿日期:2015-03-06
作者简介:侯鹏飞(1989-),男,河北南和人,硕士研究生,研究方向是空间机器人技术;刘伊威(1977-),男,黑龙江双城人,博士,副教授,主要从事空间机器人技术研究。

Abstract:In order to achieve the active compliance control of a space manipulator, a joint torque sensor is successfully developed based on the principle of resistance strain. The sensor used the spoke-structure elastomer design, with the functions of mechanical overload’s limit protection and temperature compensation. Through the finite element analysis with ANSYS, its structural design and good linearity were well verified. Then, the calibration experiment was conducted. The results show that the static indicators meet the design requirements.
Key words:resistance strain; torque sensors; elastomer; hysteresis
0引言
空间机械臂在执行空间操作时,通常会遇到抓握、旋拧等接触类操作任务,而如何对其进行有效控制是关键所在。对于仅要求自由空间运动的操作,如焊接、喷涂、转移货物等,机械臂对环境所做的瞬时机械功可以忽略,位置控制往往可以实现较高的控制精度[1-3]。但在执行约束空间的操作时,若末端执行器与环境的作用力信息没有反馈,较小的位置误差就可能引起系统不稳定,甚至损坏机械臂本体。为了提高空间机械臂的操作性能和环境适应能力,将关节力矩信号引入控制策略可以改善控制效果[4]。
关节力矩传感器集成于模块化关节内部,通过检测关节输出力矩信息来实现机械臂的主动柔顺控制,进而增强机械臂对周围环境的认知能力。为此,设计了一种新型的关节力矩传感器,并通过有限元分析与标定实验验证了设计的有效性。
1关节力矩传感器的设计
应变片式测力传感器具有精度高、稳定性好、成本低和适用面广等优点,且通过结构优化可以应用于较为恶劣的环境,故针对基于电阻应变原理的关节力矩传感器进行设计。根据力矩传感器的设计目的,确定其设计指标如表1所示。
表1关节力矩传感器设计指标

指标设计要求最大负载力矩/(N·m)80刚度/(N·m/rad)≥104线性度/%<3迟滞/%<5其他结构对称,满足尺寸配合要求
2A12硬铝合金具有强度高、密度小和热处理强化效果显著等优点,是制造力矩传感器的理想材料。其力学性能指标如表2所示。
表22A12硬铝合金力学性能指标

密度/(kg/m3)泊松比弹性模量/GPa屈服强度/MPa27800.3268000≥325
机械臂关节采用模块化设计理念,内部结构如图1所示。力矩传感器内侧固定于谐波减速器的输出端,通过锁紧螺母与柔轮连接,以便于直接检测关节承受的动态力矩。为了避免外界干扰力直接耦合到力矩传感器,没有将力矩传感器作为输出接口,而是通过关节外壳和交叉滚子轴承等中间环节的缓冲作用,将干扰作用降到最小。根据关节安装要求,同时为了避免力矩传感器信号处理线路产生故障,将力矩传感器电路板直接固定到力矩传感器的端面。

图1 模块化关节结构组成
关节力矩传感器采用轮辐式弹性体的设计,包括8根均匀分布的弹性梁,如图2所示。其中,4根主梁作为输入法兰盘和输出法兰盘的联接环节,利用其侧面弹性应变区的变形来测量力矩;同主梁相间分布的四根梁为悬臂梁,其末端位置设计有限位块,提供关节力矩传感器机械过载时的限位保护。在每根主梁的侧面应变区对称粘贴电阻应变片,同一根主梁的2个应变片组成惠斯通半桥,同时相对180°分布的2组应变片组成全桥,如图3所示。其中,R0为配平电阻,通过调整R0使得测量前全桥电路的输出电压为零。关节力矩传感器通过两组全桥电路的补偿作用,来消除温度变化、横向力等干扰造成的影响[5]。
关节力矩传感器的敏感材料选用Vishay公司生产的SR-4型应变片,其阻值为350 ± 0.2% Ω,具有灵敏度高、功耗低、温度稳定性好等优点。

图2 关节力矩传感器组件模型
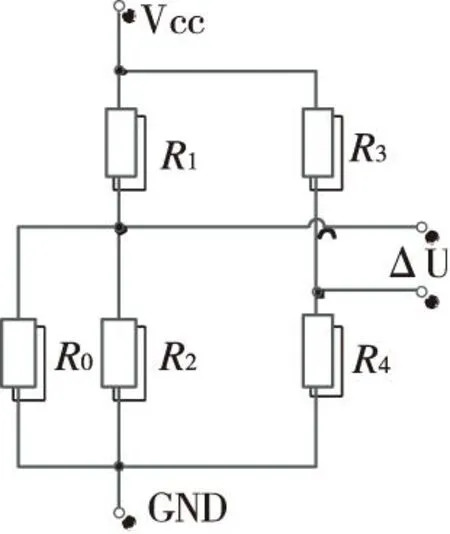
图3 全桥电路
2关节力矩传感器的有限元分析
综合考虑敏感区弹性应变、过载保护区形变、刚度值以及应力等要求,利用ANSYS软件对力矩传感器进行校核与优化,结果如图4所示。
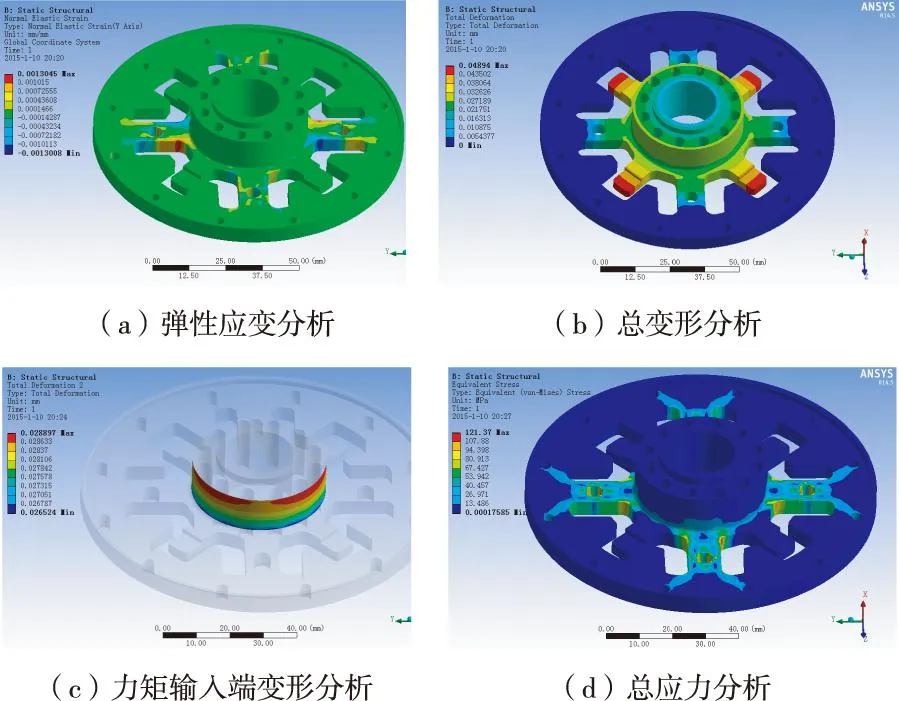
图4 关节力矩传感器的ANSYS分析结果
由图4a可知,力矩传感器的弹性应变区位于主梁侧面靠近内侧圆的根部,弹性应变约为1/1 000,且变形均匀,满足电阻应变片的测量要求;由图4b可知,过载保护区最大形变为0.049 mm,于是调整限位块与相邻挡板的间隙为0.06 mm,可达到过载保护的目的;由图4c可知,力矩输入端的最大变形量为0.029 mm,故传感器刚度K=Tmax/θmax=5.11×105N·m/rad,满足设计指标;图4d中总应力最大值为131.49 MPa,又2A12硬铝合金的屈服强度≥325 MPa,故应力满足使用要求。综上分析,关节力矩传感器的结构设计合理,满足设计指标。
对力矩传感器施加以10 N·m为间隔的等梯度力矩,分析各力矩值对应的应变和应力,进而验证力矩传感器的线性关系。等梯度力矩下的应力应变值如表3所示。其中,敏感值和峰值分别为弹性应变区和整个传感器的对应值。将得到的应变和应力数据进行拟合,分别得到如图5和图6所示的曲线。
表3等梯度载荷下的应变应力值
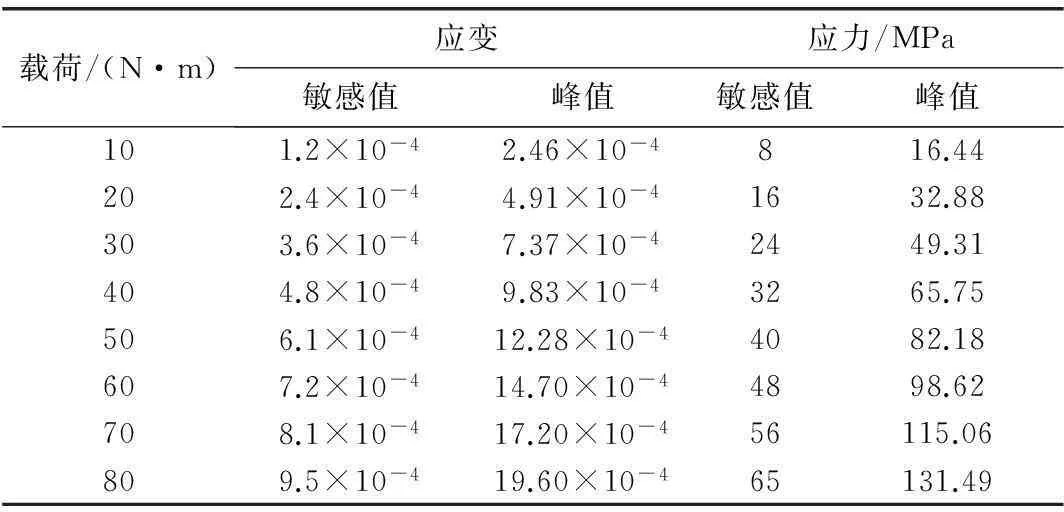
载荷/(N·m)应变应力/MPa敏感值峰值敏感值峰值101.2×10-42.46×10-4816.44202.4×10-44.91×10-41632.88303.6×10-47.37×10-42449.31404.8×10-49.83×10-43265.75506.1×10-412.28×10-44082.18607.2×10-414.70×10-44898.62708.1×10-417.20×10-456115.06809.5×10-419.60×10-465131.49
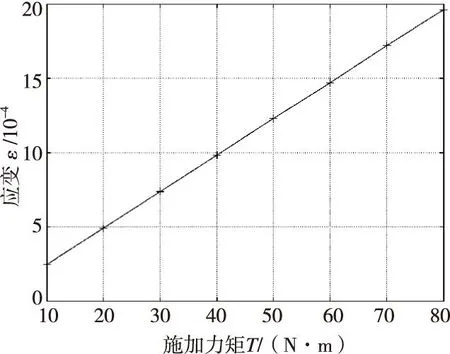
图5 应变-载荷拟合
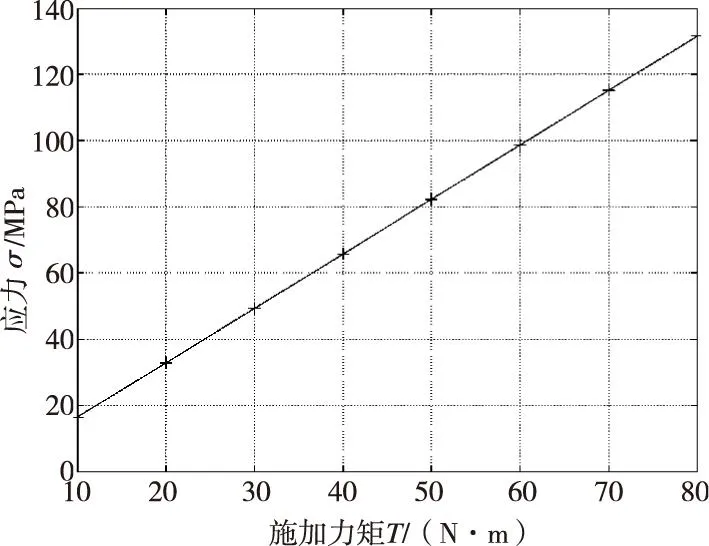
图6 应力-载荷拟合
综上可知,在等梯度载荷的作用下,力矩传感器产生的应变和应力均具有良好的线性特性,满足应变片的测量要求。
3关节力矩传感器标定
通过ANSYS软件从理论上验证了力矩传感器结构设计的合理性,但实际中由于存在制造组装误差、应变片的阻值差异及其粘贴精度等问题,力矩传感器的输出信号将受到影响。为此,需要对力矩传感器进行标定,以减小机械臂关节的系统误差。
结合力矩传感器在关节中的位置和受力情况,设计了一套关节力矩传感器标定平台。该平台主要包括力矩传感器组件、连接单元、传动单元、加载单元(1 kg砝码若干)、信号处理单元、上位机(含串口接收软件)、直流电源和固定支架等。具体标定流程为:
a.设定传动路线,对力矩传感器施加顺时针方向的力矩,从空载开始每次加1个砝码,加到最大载荷后逐次减载,减到空载时记录数据。
b.改变传动路线,以同样的方法进行逆时针方向加载,并记录数据,至此完成1次标定过程。
c.重复上述操作5次,分别记录标定数据,其中桥路A测得的数据如表4所示。
d.绘制实验曲线,并计算传感器静态指标,标定实验结束。
4标定结果分析
以电桥A为例,绘制力矩传感器的标定数据曲线,如图7所示。进行最小二乘拟合,即得到力矩传感器的静态特性实测曲线和迟滞特性曲线,分别如图8和图9所示。计算力矩传感器2个全桥的线性度、重复度、迟滞误差和灵敏度等静态指标[6],如表5所示。
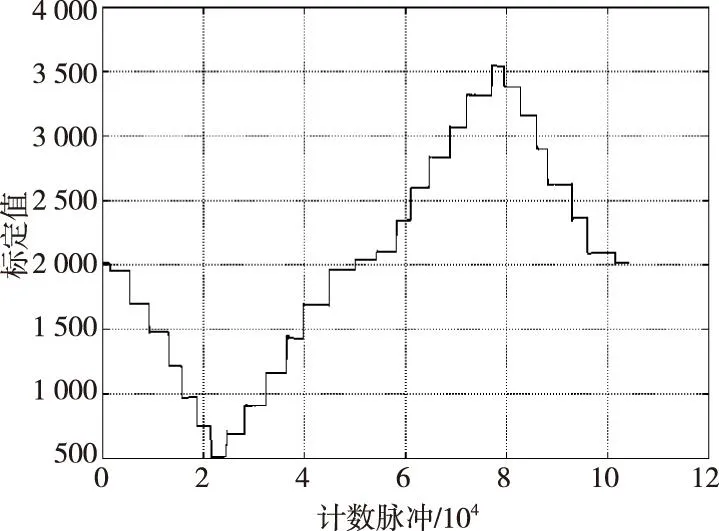
图7 力矩传感器标定数据曲线

图8 力矩传感器静态特性实测曲线
表4桥路A标定数据记录

记录项加载过程减载过程施加力矩/(N·m)3.9219.634.550.265.980.065.950.234.519.63.92标定值顺时针逆时针实验119441704145712219937239201158144617021974实验219561702148012179737509091164142916871962实验319571702147912149557429091145141316921963实验419561716146512219807328791145142416841962实验519591718146412319957168791165142716831960均值19551708146912219797338991155142816901965实验121082345260628203064332931652903261223552083实验221022343259928323069331431582900262523632093实验321022345259028343066330931542883262523712092实验421002338258528393058326931342879263523752095实验520962348257828103103332431652911264123662097均值21022344259228273073330931552885262823652092

图9 力矩传感器迟滞特性曲线
表5力矩传感器静态指标

序号线性度/%重复度/%迟滞/%灵敏度/(V/(N·m))电桥A0.522.443.180.0201电桥B0.532.443.180.0201
由图8可知,设计的力矩传感器的静态特性实测曲线呈现出较好的线性特性。电桥A和电桥B的曲线拟合方程分别为y=0.0201x+2.5262和y=0.0201x+2.5259,可知该传感器的2个全桥电路近似对称。从表5可以看出,力矩传感器的线性度远小于3%,且迟滞小于5%,满足设计指标。
5结束语
面向空间接触类操作任务,成功地研制了一种新型关节力矩传感器,以实现机械臂的主动柔顺控制。该传感器采用电阻应变原理,通过轮辐式弹性体的设计以检测关节输出力矩,增设的限位块可提供过载限位保护,组建了两个惠斯通全桥以实现温度补偿。利用ANSYS对敏感区弹性应变、过载保护区形变、刚度值以及应力等指标进行了有限元分析,验证了传感器结构设计的合理性和良好的线性特性。最后,对力矩传感器进行标定实验,绘制了静态特性实测曲线和迟滞特性曲线,结果表明传感器的静态指标满足设计要求。
参考文献:
[1]An.CH,Atkeson.CG,Griffiths.JD,et al. Experimental evaluation of feedforward and computed torque control[J]. IEEE Transactions on Robot and Automation,1989,5(3):368-373.
[2]Gu Y L,Xu Y. A normal form augmentation approach to daptive control of space robot systems[J]. Dynamics and Control,1995,5(3):275-294.
[3]Khatib O. A unified approach for motion and force control of robotic manipulators:the operational space figuretion[J]. IEEE Journal of Robotics and Automation,1987,3(1):43-53.
[4]Ghorbel.F,Hung.JY,Spong.MW. Adaptive control of flexible-joint manipulators[J]. IEEE Control Systems Magazine. 1989,4(3):9-13.
[5]Hirzinger G, Albu-Schaffer A, Hahnle M, et al. On a new generation of torque controlled light-weight robots[C]∥Proceedings of the 2001 IEEE International Conference on Robotics & Automation,2001:3356-3363.
[6]赵学增.现代传感技术基础及应用[M]. 北京:清华大学出版社,2009.
猜你喜欢
机械工业标准化与质量(2022年7期)2022-08-12
弹性体(2021年6期)2021-02-14
世界橡胶工业(2017年2期)2017-04-13
材料科学与工程学报(2016年1期)2017-01-15
中国塑料(2016年10期)2016-06-27
中国塑料(2015年3期)2015-11-27
橡胶工业(2015年1期)2015-07-29
橡胶工业(2015年3期)2015-07-29
噪声与振动控制(2015年4期)2015-01-01
塑料包装(2014年1期)2014-11-29
