
永磁电机的力矩波动对舵机修正精度的影响
2016-01-28 03:34:13张福新张嘉易李新福
机械与电子 2015年7期
张福新,王 海,张嘉易,张 健,李新福
(沈阳理工大学兵器科学技术研究中心,辽宁 沈阳 110159)
Effect of Permanent Magnet Motor Torque Fluctuation on Steering Gear Correction Accuracy
ZHANG Fuxin,WANG Hai,ZHANG Jiayi,ZHANG Jian,LI Xinfu
(Center for Ordnance Science and Technology Research,Shenyang Ligong University,Shenyang 110159,China)
永磁电机的力矩波动对舵机修正精度的影响
张福新,王海,张嘉易,张健,李新福
(沈阳理工大学兵器科学技术研究中心,辽宁 沈阳 110159)
Effect of Permanent Magnet Motor Torque Fluctuation on Steering Gear Correction Accuracy
ZHANG Fuxin,WANG Hai,ZHANG Jiayi,ZHANG Jian,LI Xinfu
(Center for Ordnance Science and Technology Research,Shenyang Ligong University,Shenyang 110159,China)
摘要:依据弹道修正基本原理,对弹道修正基本流程进行设计。通过查阅相关资料,对弹道修正机构中的舵机所受力矩进行分析。通过对修正弹进行气动仿真,可知永磁电机的力矩波动会使舵机在目标停止位置出现摆动,使永磁电机对舵机的控制精度降低。又对影响永磁电机力矩波动的因素进行分析,可知减小硅钢片槽口宽度和采用磁极偏移可以减小永磁电机的力矩波动。结果表明,为了提高舵机的修正精度,必须要减小永磁电机的力矩波动。
关键词:弹道修正;力矩分析;力矩波动;修正精度
中图分类号:TM301.4
文献标识码:A
文章编号:1001-2257(2015)07-0031-03
收稿日期:2015-04-27
基金项目:国家“八六三”计划资助项目(2009AA04Z167); 辽宁省自然科学基金(201102182)
作者简介:张福新(1991-),男,辽宁开原人,研究生,研究方向为弹道修正技术。

Abstract:Based on the basic principles of trajectory correction, a basic process to carry out trajectory correction is designed. After a review of relevant data, the steering gear of trajectory correction mechanism by torque is analyzed. Through simulations of the correct projectile aerodynamics, it is concluded that the permanent magnet motor torque fluctuation will appear in the position of steering gear in the target to stop oscillating and the controlled precision of the permanent magnet motor control of the steering gear will decrease. After analyzing the influencing factors of permanent magnet motor torque fluctuation, it is concluded that reducing the silicon steel sheet slit width and the pole shift can reduce the permanent magnet motor torque fluctuation. The results show that in order to improve the correction precision of steering gear, the permanent magnet motor torque fluctuation must be reduced.
Key words:ballistic correction torque analysis torque fluctuation correction accuracy
0引言
通过在原有所谓“笨蛋”的头部安装上修正舵机,使其具有修正能力,从而使弹丸按照预定的轨迹飞行的方法已被证明是非常有效的。舵机结构采用4个舵片十字型的方式进行布置,垂直位置的一对舵片采用形状相同,偏角大小为α度且朝向同一方向,在修正过程中用于改变弹丸的飞行方向,水平位置的一对舵片采用形状相同,偏角大小为β度且朝向相反,在修正过程中对修正机构进行转速的风阻控制。舵机和弹体之间通过轴承连接,使舵机和弹体之间可以相互转动。弹丸出炮口后,风阻舵机受到空气动力作用会产生使舵机与原旋转方向相反的风阻力矩,这个力矩可以快速地使舵机旋转速度减小直至反转达到平衡。若要控制舵机滚转角,则利用风阻力矩、电磁力矩和轴承摩擦力矩的合力矩来完成。而永磁电机的力矩波动也是影响永磁电机对舵机控制精度的重要因素,所以针对永磁电机力矩的波动研究是二维弹道修正技术的基础,对以后更加深入的研究二维修正弹控制算法具有指导意义[1]。
1弹道修正基本流程
当修正弹飞出炮口后,由修正弹自带的GPS和INS组合导航系统对修正弹飞行速度、空中坐标、舵机的旋转速度和空中姿态等数据进行实时测量,并把测得的数据实时传给弹载计算机,把实际解算的弹道与发射前灌入弹载计算机的标准弹道进行比较,得出实际弹道与标准弹道的实际偏差值,然后通过控制系统里的控制算法正确地计算出修正弹舵机相对于地坐标的姿态和进行修正所需要的驱动力矩,当修正弹回到预定的理想弹道后,修正弹的控制机构释放舵机,让其在可修的转速下自由旋转,等待接收控制系统再次发出修正指令,因此可以达到对修正弹的连续修正,弹道修正的基本流程[2]如图1所示。

图1 弹道修正流程
2舵机所受力矩的分析
弹丸出膛后舵机不仅会受到阻力、升力,还会受到风阻力矩Mxω与轴承摩擦力矩Mm的共同作用,当被修正时还会受到电磁力矩Me的作用。这些力矩的合力矩M是控制舵机旋转,并使之飞行到最佳弹道的动力。其中天气情况、弹丸飞行速度以及舵片偏角等都是影响舵机所受到的风阻力矩大小的因素,在风阻力矩的作用下会使舵机原本和弹体相同的旋转速度及方向在很短的时间内发生改变,使舵机在出膛后不久就会迅速减速旋转,接着会反向高速旋转,直到达到一个稳定的转速。由于舵机与弹体之间是通过轴承进行连接,必然会产生轴承的摩擦力矩,并且其方向始终与舵机的旋转方向相反。而电磁转矩无疑成为后续弹丸有效修正的主导因素,并且其方向和风阻力矩的方向相反。舵机所受力矩如图2所示[3]。
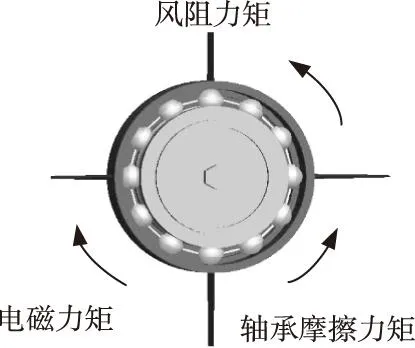
图2 舵机受力分析
3永磁电机力矩波动的仿真分析
3.1 建立弹道方程
为分析永磁电机力矩的波动对舵机控制精度的影响,在此根据弹体部分和舵机部分所受空气动力,并加入控制算法,建立具有空间六自由度的刚体弹道模型,具体模型如下:



(Fx,Fy,Fz)为作用在弹上的总力,包含了修正舵部分所受空气动力和除舵片以外的弹体部分所受空气动力在弹道坐标系上的投影。(Mξ,Mη,Mζ)为作用在弹上的空气动力对质心的力矩在弹轴坐标系三轴上的分量[4]。
3.2 结果分析
当弹丸飞行到可修段,弹载计算机会根据采集到的弹丸的飞行姿态、速度和空间位置解算出实际弹道,与预定的理想标准弹道进行对比之后,解算出相应的修正量,控制系统迅速发出控制命令,控制电机迅速响应,使舵机快速减到预先所规定好的稳定的低速旋转状态,再根据控制方案使舵机快速转到解算好的位置(相对于地面坐标系),利用舵机的气动特性执行弹道修正。由于舵机的气动阻力和舵机的风阻力矩是随弹丸的飞行速度的改变而改变的量,并且由于永磁电机自身存在的原因导致永磁电机的力矩出现波动现象,因此标定舵不能很好的保持在某一指定角度,而是保持在一种左右摆动的状态,永磁电机在±0.06 N·m波动时修正舵机的工作过程如图3所示。

图3 电机力矩在± 0.06 N·m波动时修正舵机的工作过程
从图3可以看出,弹道修正机构要求修正舵机在弹丸飞行至60~70 s时间段调整到180°位置时,修正舵机在±15°范围内上下摆动,这就降低了永磁电机对舵机的控制精度。
当其它条件完全一样,永磁电机力矩波动范围为±0.09N·m时,修正舵机的工作过程如图4所示。

图4 电机力矩在± 0.09 N·m波动时修正舵机的工作过程
从图4可以看出,在60~70 s时间段舵机的摆动角度明显加大。由于二维弹道修正原理主要就是利用空气和舵机之间产生侧向动力的方式来执行修正动作的,永磁电机力矩波动的大小会直接影响到舵机修正的精度,因此为了提高舵机的修正精度,必须要削弱永磁电机的力矩波动[5]。
4永磁电机力矩波动的削弱方法分析
由于影响永磁电机力矩波动的因素很多,但影响的主要因素还是电机的结构参数的设计,合理的电机结构尺寸和布局可以有效的减小永磁电机力矩的波动。本文主要分析了磁极偏移和硅钢片槽口宽度的因素对永磁电机力矩波动的影响。利用 电磁场分析软件针对这2种因素进行二维瞬态磁场分析,并且每次仿真除了要分析的影响因素以外,电机的其它结构参数均保持相同,从而能够有效地获得其对永磁电机力矩波动的影响规律。
4.1 磁极偏移对永磁电机力矩波动的影响


图5 永磁电机磁极偏移后和磁极无偏移的力矩波动的对比
从图5可以看出,采用磁极偏移后永磁电机力矩波动的幅值下降的非常明显,大约从0.055 mN·m下降到0.008 mN·m,因此,采用磁极偏移对降低永磁电机力矩波动的效果非常明显。
4.2 硅钢片槽口宽度对永磁电机力矩波动的影响
永磁电机的定子槽采用24槽结构,定子槽型采用梨形槽,气隙长度为1 mm。在保持其他结构参数和布局一样的情况下,建立硅钢片槽口宽度从0.5~2 mm的6种模型。通过仿真计算得出永磁电机空载运行时,各硅钢片槽口宽度对永磁电机力矩波动影响情况如图6所示。
从图6可以看出,不同齿槽开口宽度的永磁电机力矩波动的周期变化是一样的。硅钢片槽口宽度在0.5 mm、0.8 mm和1.1 mm之间时永磁电机力矩波动的变化幅值不是太大,但是随着齿槽开口宽度进一步增大,永磁电机力矩波动的幅值上升趋势比较明显。因此为了减小永磁电机力矩的波动幅度,在保证电枢绕组嵌线方便的情况下,应该尽量减小硅钢片槽口宽度[6]。

图6 不同硅钢片槽口宽度对永磁电机力矩波动的影响
5结束语
论述弹道修正基本流程,对弹道修正机构中的舵机在工作时所受力矩进行分析。通过对修正弹进行气动仿真,得出永磁电机的力矩波动会使舵机在目标停止位置出现摆动的结论,使永磁电机对舵机的控制精度降低。通过电磁场分析软件对永磁电机进行仿真,可知采用磁极偏移和减小硅钢片槽口宽度可以减小永磁电机的力矩波动,从而提高永磁电机对舵机的控制精度,使舵机的修正精度提高。为弹道修正机构中控制电机的进一步优化设计提供了一定的参考依据。
参考文献:
[1]王俊全.弹道修正弹舵机的结构设计和控制[D].南京:南京理工大学,2003.
[2]张嘉易,王广,郝永平.二维弹道修正弹鸭舵修正机构气动特性研究[J].弹箭与制导学报,2013,33(2):88-91.
[3]王欣.弹箭精度智能控制与修正方法研究[D].沈阳:沈阳工业大学,2010.
[4]徐劲祥.弹道修正弹六自由度弹道仿真研究[J].兵工学报,2007,28(4):411-413.
[5]王秀和.永磁电机[M].北京:中国电力出版社,2007.
[6]王秀和.基于磁极分段的齿槽转矩削弱方法研究[C]//中国电工技术学会.第十届全国永磁电机学术交流会论文集.赣州,2010:4-10.
