
某种永磁同步发电机直接转矩控制系统设计
2016-01-28 05:11:42张进超郝永平张令涛
机械与电子 2015年7期
关键词:风洞试验
张进超,王 玲,郝永平,张令涛
(沈阳理工大学兵器科学研究中心,辽宁 沈阳 110159)
A Permanent Magnet Synchronous Generator Direct Torque Control System Design
ZHANG Jinchao,WANG Ling,HAO Yongping,ZHANG Lingtao
(Center for Ordnance Science and Technology Research,Shenyang Ligong University,Shenyang 110159,China)
某种永磁同步发电机直接转矩控制系统设计
张进超,王玲,郝永平,张令涛
(沈阳理工大学兵器科学研究中心,辽宁 沈阳 110159)
A Permanent Magnet Synchronous Generator Direct Torque Control System Design
ZHANG Jinchao,WANG Ling,HAO Yongping,ZHANG Lingtao
(Center for Ordnance Science and Technology Research,Shenyang Ligong University,Shenyang 110159,China)
摘要:依据二维弹道修正原理,提出修正舵机中永磁同步发电机直接转矩控制方法,针对d-q坐标系下的永磁同步电机模型,研究了永磁同步电机直接转矩控制方案。结果表明,修正舵机中发电机直接转矩控制系统输出转矩能够达到高速旋转弹的修正效果。
关键词:修正舵机;弹道修正;永磁同步发电机;电磁转矩;风洞试验
中图分类号:TJ765.2
文献标识码:A
文章编号:1001-2257(2015)07-0034-04
收稿日期:2015-04-27
基金项目:国家863计划资助项目(2009AA04Z167)
作者简介:张进超(1989-),男,河北邯郸人,硕士研究生,研究方向为现代控制技术与应用。

Abstract:Based on two-dimensional trajectory correction principle, a revised steering gear method of direct torque control of permanent magnet synchronous generator is proposed. For a permanent magnet synchronous motor model of d - q coordinates, a permanent magnet synchronous motor direct torque control scheme is studied. The results showed that corrected steering gear direct torque control system of the generator output torque can achieve high speed rotating projectile correction.
Key words:revised steering gear;ballistic correction;permanent magnet synchronous generator;electromagnetic torque;wind tunnel tests
0引言
二维弹道修正是指对弹丸横向和纵向两个方向均进行修正,主要以横向修正为主,通过改变俯仰力矩和偏航力矩来控制弹丸飞向目标[1]。高速旋转稳定弹通过安装修正舵机来实现弹道修正的目地,舵机系统中采用永磁同步发电机为转矩输出装置,直接作用于修正舵片,弹载计算机解算出修正量的大小和方向进行有限次的不连续的动作从而实现对弹丸在纵向和横向上的修正[2]。
修正舵机的设计充分利用了高速旋转弹弹体高速旋转的前提,弹体同永磁同步发电机的外转子固定连接,修正舵片同发电机定子固定连接。弹体的旋转力矩为永磁同步发电机提供机械能,进而产生电磁转矩带动修正舵片转动,当电磁转矩同风阻力矩达到平衡时舵片停止在某一角度,实现修正弹道的目标。永磁同步发电机(PMSG),因为省去了励磁绕组、磁极铁心和电刷-集电环结构,结构简单紧凑,可靠性高,能够在高转速下正常工作[3-4]。
1永磁同步发电机直接转矩控制理论
直接转矩控制摒弃了解耦的思想,取消了旋转坐标变换,通过检测电机定子电压和电流,借助瞬时空间矢量理论计算电机的磁链与转矩,并根据与给定值比较所得差值,实现磁链与转矩的直接控制[5]。
在建立永磁同步发电机的数学模型前,且在满足精度的情况下通常做以下假设:忽略电机绕组漏感;转子上没有阻尼绕组;忽略铁心饱和,认为磁路线性,电感参数不变;永磁材料的电导率为零;不计涡流和磁滞损耗;定子电枢绕组中感应电势波形为正弦[4]。永磁同步发电机的运动方程为:
(1)
Te为电磁转矩;TL为负载转矩;J为转动惯量;ωm为机械角速度;B为粘带摩擦系数。由于直接转矩控制主要是在两相静止坐标系下完成的,故同空间矢量坐标变换,建立永磁同步发电机d-q坐标系下的数学模型,在不计饱和的情况下发电机的相量如图1所示。

图1 永磁同步发电机的坐标变换相量图
图1中,a-b-c为三相静止坐标系;α-β为两相静止坐标系;d-q为转子转速ωr旋转坐标系,d轴指向转子永磁体磁链ψf方向;θr为转子永磁体磁链相对定子a相绕组α轴的空间位置, 为定子磁链相对定子a相绕组α轴的空间位置角;δ为定子磁链矢量ψs相对于转子磁链ψf的空间位置角[4-6]。
将三相静止坐标系变换到d-q两相静止坐标系,PMSG的电流、磁链方程为:

(2)


(3)
iA,iB,iC为发电机三相电流;id,iq分别为定子电流矢量的d-q轴分量;ψd,ψq分别为定子磁链的d-q轴分量;Ld,Lq为定子绕组的d-q轴电感分量;Rs为定子电阻;ψf为基波磁通Φ0的磁链。电磁转矩Te在旋转d-q坐标系下的表达式为:

(4)
P为极对数。
系统采用id=0控制方式,即定子直轴电流为零,因而消除了永磁体的去磁现象或饱和现象[6]。电磁转矩Te为:

(5)
因为对于永磁同步发电机来说基波磁通Φ0的磁链ψf为定值,当控制PMSG功率因数为常数时,在d-q轴系下发电机的电磁转矩Te只随着定子电流的转矩电流分量iq成线性关系。故此,可以通过控制iq达到调节发电机电磁转矩的目的,本系统采用电枢回路串联电阻的方式调节发电机的电磁转矩。
2模拟转台的控制系统设计
通过多次风洞试验得到修正机构舵片所受空气阻力距的数据信息,并根据风洞试验的结果搭建起了地面模拟转台,如图2所示。

图2 实验装置实物
模拟转台顶部运用一个直流电机和阻尼装置产生动态阻力矩(当电机的转速不同时,阻尼装置产生的阻尼力矩也不同),模拟了弹丸在飞行过程中修正舵机的受力状态(以下称为模拟舵机);中部采用增量式光电编码器对模拟舵机的转速和位置信息进行实时检测,并把电机的位置检测信息反馈到试验台的控制系统构成速度环控制;最下方利用高速电动机模拟飞行过程中高速旋转的弹体,带动永磁发电机为舵机系统的修正提供动力。控制系统根据事先规定好的控制方案和编码器测定参数,通过不断地调整外接电路的阻值,实现对模拟舵机的转速、定位停止和角度调整的控制[2,7]。
永磁同步发电机结构采用4对极24槽的结构。定子同十字型舵片固定连接,转子同旋转弹体连接,弹体在全弹道处于高旋转状态,产生使定子与转子可以相对旋转转矩,通过控制该力矩的大小来平衡舵片所受风阻力矩的作用,达到舵机系统的减旋和修正作用。
当串接电阻最大时,力矩较小,此时模拟风阻力矩比发电机输出力矩大,模拟舵机相对发电机反向高速旋转[8-9]。为了实现模拟舵机从高速旋转到低转速稳定状态,并且在预定位置停止转动的过程,编码器将检测到的实际参数反馈到控制系统与预设参数进行比较,然后由单片机发出控制指令,通过改变串联电阻的阻值,调整电枢回路电流,直到达到预设转速并保持稳定旋转,然后进行下一步的定位动作。其操作流程如图3所示。

图3 控制程序流程
3实验结果分析
3.1 电枢回路串接电阻值同电磁转矩的关系
通过修正弹在全弹道飞行下进行的风洞实验,测得修正舵片所受风阻力矩最大值为0.612 N·m,即永磁同步发电机输出转矩必须大于风阻力矩才能达到修正的效果。把实验电机三相进行串联短接测量不同转速下发电机的最大输出转矩,结果如表1所示。
从表1可知,当外转子的转速转到6 000 r/min的条件下发电机的最大输出转矩为0.658 7 N·m,设计的永磁发电机已经达到修正要求。
表1不同转速下的永磁发电机的最大控制转矩

转速(r/min)最大输出转矩T/(N·m)转速/(r/min)最大输出转矩T/(N·m)45000.352360000.658750000.451265000.713255000.549870000.8348
高速旋转弹弹体转速可达12 000 r/min,随着转子转速的不断提高永磁发电机的最大输出转矩也在不断的增大。为了验证发电机输出小转矩同样能达到修正的效果,实验采用原动机6 000 r/min条件下,进行永磁同步发电机的直接转矩控制实验。串接电阻与电磁转矩之间的关系,如表2所示。
表2电阻与电磁力矩的关系
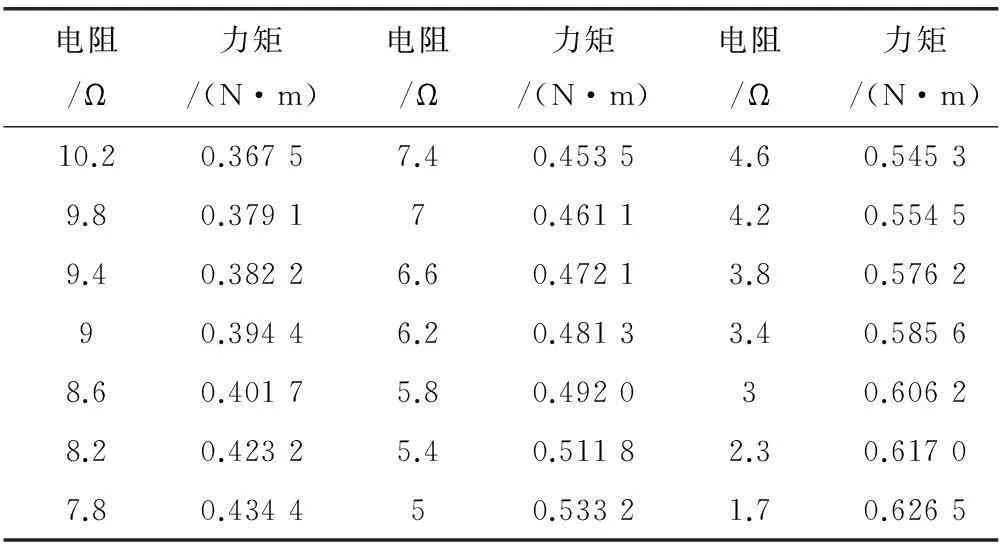
电阻/Ω力矩/(N·m)电阻/Ω力矩/(N·m)电阻/Ω力矩/(N·m)10.20.36757.40.45354.60.54539.80.379170.46114.20.55459.40.38226.60.47213.80.576290.39446.20.48133.40.58568.60.40175.80.492030.60628.20.42325.40.51182.30.61707.80.434450.53321.70.6265
从表2数据可以看出,当外接电阻值越小时,电枢回路电流分量iq越大,使得永磁同步发电机的输出转矩越大。说明电枢回路串接电阻实现了永磁同步发电机的直接转矩控制。利用Matlab将其以方程和曲线的形式表示,如图4所示。
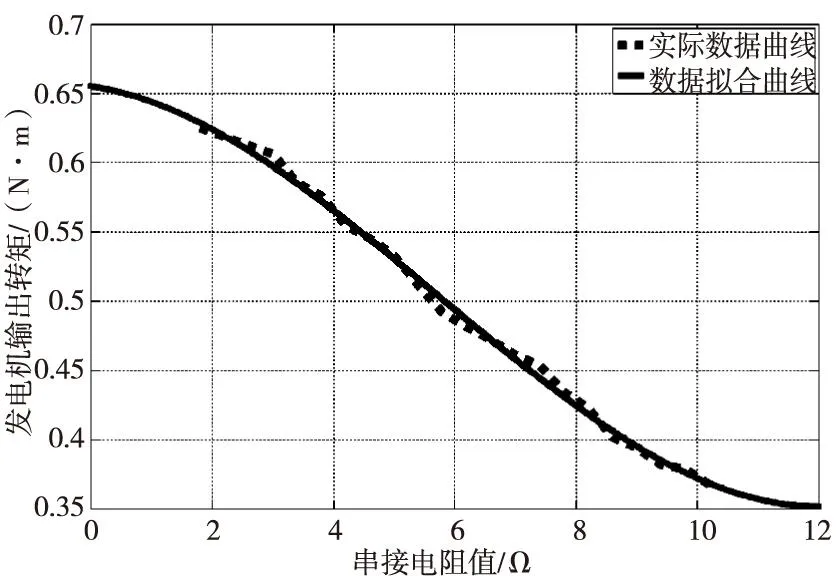
图4 电磁力矩随电阻阻值的变化曲线
其拟合表达式为:
y=0.000 310 13x3-0.005 324 9x2-
0.006 038 2x+0.655 1
(6)
3.2 控制系统硬件实现
外围控制电路采用8个并联的不同阻值电阻构成,根据编码器反馈的位置检测信息来调整串接电阻值。不同的并联之路的接通来实现若干电阻的并联,从而可以形成多组电阻值的组合。另外采用电阻并联的方式,在一定程度上减小了每一个电阻上的功率,防止电阻过热而烧坏电阻。改变电枢回路的电阻值,达到控制iq的目的,实现了永磁同步发电机的直接转矩控制,进而实现了高速旋转弹丸的修正作用。
4结束语
提出一种用于弹道修正弹舵机系统中永磁同步发电机的直接转矩控制系统,实现了修正舵机的减旋和停止角度的控制。通过理论分析和平台实验的验证,所设计的永磁同步发电机直接转矩控制系统能够达到修正弹的基本要求。结果表明该控制方法人为机械特性好,并能够达到相应的控制准确性,良好的快速性和稳定性,为后续的弹道修正的进一步研究提供了很好的参考依据。
参考文献:
[1]周中华.二维弹道修正装置设计[D].南京:南京理工大学,2006.
[2]李新福,陈柏宁,郝永平,等.弹道修正执行机构中电机的控制方法研究[J].成组技术与生产现代化,2014,31(3):36-40.
[3]William J.Larkin,Mitch homas.Atmospheric flignt of a variable-bend body[J].Younal of Guidance and control,1979,2(5):382-387.
[4]王秀和,李光友,杨玉波.永磁电机[M].北京:中国电力出版社,2010.
[5]万中奇.永磁同步发电机预测直接转矩控制策略研究[D].浙江:浙江大学,2013.
[6]王正,易泽成.基于矢量控制的永磁同步发电机电磁转矩控制方法优化[J].能源研究与管理,2012,32(4):41-44.
[7]邓星钟.机电传动控制[M].武汉:华中科技大学出版社,2006.
[8]Huynh C,Hawkins L,Farahani A.Design and development of a 2 MW high speed permanent magnet alternator for shipboard application[J].Naval Engineers Journal,2005,117(4):23-29.
[9]辜承林,陈乔夫,熊永前.电机学[M].武汉:华中科技大学出版社,2005.

猜你喜欢
科学大众·小诺贝尔(2024年6期)2024-06-29 09:39:57
北京航空航天大学学报(2022年6期)2022-07-02 01:58:40
北京航空航天大学学报(2017年1期)2017-11-24 05:22:35
电线电缆(2017年5期)2017-10-18 00:52:03
北京航空航天大学学报(2016年9期)2016-11-16 02:02:39
北京航空航天大学学报(2016年5期)2016-11-16 01:50:38
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10 02:39:22
民用飞机设计与研究(2015年3期)2015-12-07 12:09:29
航空学报(2015年4期)2015-05-07 06:43:33
水道港口(2015年1期)2015-02-06 01:25:44
