
用于垂直面内电磁驱动的装置设计与仿真
2016-01-28 03:34李来利
机械与电子 2015年7期
李来利,李 静
(中国科学技术大学精密机械与精密仪器系,安徽 合肥 230027)
Design and Simulation of an Apparatus for Electromagnetic Actuating in the Vertical Plane
LI Laili,LI Jing
(Department of Precision Machinery and Precision Instrumentation,University of Science and Technology of China,
Hefei 230027,China)
用于垂直面内电磁驱动的装置设计与仿真
李来利,李静
(中国科学技术大学精密机械与精密仪器系,安徽 合肥 230027)
Design and Simulation of an Apparatus for Electromagnetic Actuating in the Vertical Plane
LI Laili,LI Jing
(Department of Precision Machinery and Precision Instrumentation,University of Science and Technology of China,
Hefei 230027,China)
摘要:采用SolidWorks和ANSYS相结合的方法,设计了一个四极子电磁驱动装置,以实现在垂直平面内对磁球位移的2-D线性控制。在Zhang等人提出的磁力模型基础上,通过ANSYS的仿真计算,对驱动电流与磁球受力平衡位置的关系进行了修正,并验证了该装置能够用于垂直面内二维位移的线性控制。
关键词:电磁驱动;SolidWorks;ANSYS
中图分类号:TM153
文献标识码:A
文章编号:1001-2257(2015)07-0011-04
收稿日期:2015-03-17
基金项目:973重大科学研究计划项目(2012CB9375000)
作者简介:李来利(1990-),女,安徽亳州人,硕士研究生,研究方向为光电检测技术与仪器;李静(1968-),女,安徽合肥人,副教授,研究方向为光电测试技术与仪器。

Abstract:By combining SolidWorks with ANSYS,a quadrupole electromagnetic actuator is designed to apply 2-D linear displacement control to magnetic beads in a vertical plane. Based on the magnetic force model developed by Zhang et al. and using ANSYS simulation, the functional relationship between the effective drive current and the force balanced position of magnetic bead is corrected. Furthermore,the ability of the apparatus to apply linear displacement control in the vertical plane is verified.
Key words:electromagnetic actuation;SolidWorks;ANSYS
0引言
在生物显微操纵技术中,磁镊是通过外加梯度磁场对连接生物样品的导磁性微粒操纵,该过程无机械接触、无热损伤[1]。此外,由于典型的生物材料对磁场不敏感[2],所以磁镊仅作用于导磁性微粒,不会发生不必要的捕获。因此,磁镊在生物学领域中具有很高的应用价值。近年来,有关磁镊的研究集中在电磁驱动装置,即采用电磁铁和磁极来产生可控的梯度磁场,对处于场中的超导磁性微粒进行操控[3-6]。
在生物学大分子拉伸实验中,通常大分子的一端与盖玻片表面连接,另一端与磁球连接,需要在垂直平面内对磁球施加磁力,控制其轴向位移[7]。为了满足实验需要,设计了一个四极子电磁驱动装置,用于在垂直平面内对目标磁球实施2D方向上的操控。该装置同时集成了纵向磁镊和横向磁镊的功能,且易于样品池的摆放,能与高数值孔径的物镜和聚光器配合使用。
1装置的结构设计
采用SolidWorks设计的装置结构如图1a所示,由4个磁极、4个线圈、1个方形磁轭以及样品池组成。磁轭带有4个凸起,用于缠绕线圈,它将所有线圈和磁极连接成回路,用于形成完整磁路、增强磁场。每个驱动线圈对应1个磁极,4个磁极分上下2层分布,其俯视图如图1b所示,深灰色为顶层磁极,浅灰色为底层磁极。为了便于磁轭的连接,底层磁极加了2个垫片,其厚度控制上下层磁极间距离。俯视图中磁极P1与P4极尖重合,P2与P3极尖重合,4个磁极的极尖在XZ平面内围成了工作区域。样品池由2片盖玻片形成,插置于2层磁极之间。

图1 装置结构设计
磁极选用高导磁镍铁合金,其相对磁导率为36 000,厚度为100 μm。4个磁极设计成尖形,且尖端是一半径50 μm的圆角,用于增加磁场梯度、优化磁力。磁轭由冷轧钢加工而成,其相对磁导率为5 000,厚度为2 mm。线圈由直径0.5 mm的磁导线绕制而成,每个线圈的匝数是25。4个极尖所围成的工作区域是边长600 μm的正方形。样品池可用空间高度为240 μm,满足实验操作要求。整体装置成扁形,厚度小于5 mm,因此能放置于高数值孔径的显微物镜和聚光器之间。
当电流施加到线圈时,产生的磁通量将沿着磁极传输到极尖,然后从极尖扩散到空气,在工作区域内产生一高梯度场作用于磁性微粒。由于每个磁极仅能产生指向极尖的引力,通过采用4个磁极,可以在XZ平面内产生2D方向的磁力。
2力学模型
为便于建模,定义了磁驱动坐标系{O;x′,z′},如图2所示。4个极尖所围成的虚线方形区域为工作区域,其中心为坐标原点,极尖所在位置是[±e00]和[00±e]e=424 μm。测量坐标系{e;x,z}绕Y轴逆时针旋转45°即可得到驱动坐标系,两者关系如下:

(1)

图2 磁驱动坐标系和测量坐标系
磁驱动的原理是通过梯度分布的磁场对处于其中的可磁化微粒施加力的作用。超顺磁性磁球置于磁场B中,它将被磁化形成磁偶极子,并与外部磁场相互作用。磁球所受的梯度磁力为:

(2)
m=(3V/μ0)((μr-1)/(μr+2))B为磁球有效磁化强度,V是磁球体积,μ0是真空磁导率,μr为磁球相对磁导率。显然当磁球选定后,其所受的磁力大小和方向是由外部梯度磁场决定。
所设计的电磁装置满足2个条件:采用电磁铁和尖形极子来产生磁场;设计中采用磁轭来形成封闭的磁路,可以采用Zhang Zhipeng等人提出的力学模型[5],即基于磁单极子近似和叠加原理的方法建模。模型中,每个磁极产生的磁场近似为1个点磁荷场,系统产生的总磁场通过叠加原理获得。磁驱动坐标系下,四极子电磁驱动系统对工作区域内磁球施加的磁力为:

(3)



(4)

由式(1)和式(4)可推导出,测量坐标系下磁力平衡点位置,得到归一化的位移与归一化有效驱动电流的关系为:

(5)
式(5)表明,通过控制有效驱动电流,可以控制磁阱位置,进而移动磁镊捕获的磁球。
3ANSYS仿真结果与分析
将采用SolidWorks设计的三维结构导入ANSYS,赋单元和材料属性并划分网格,对系统电磁特性进行仿真计算。在ANSYS中,采用标量法描述三维静态磁场,采用有限元哑元SOURC36单元建立电流激励模型。线圈设置为虚拟电流源,不需网格划分。为了在工作区域内得到精确的解,采用了局部区域网格细分。然后施加边界条件和虚拟线圈激励,最后采用差分标势法求解。
3.1 梯度力的产生和控制
单线圈激励时,将10安匝的磁动势施加到与P1极子相关联的线圈,系统在XZ平面内产生的磁场分布如图3所示。

图3 XZ平面内的磁场分布
由等值云图3a可见,线圈施加电流后,磁极P1在接近极尖的工作区域内产生了高梯度场。此外,从磁感应强度等值线图3b可见,在XZ平面内磁极P1所产生的磁场等值线是以极尖为中心的近似环形分布,类似于点电荷的电场,可以近似为磁单极子,这与其他文献的报道一致[5]。由于极尖并非理想的磁单极子,因此在接近极尖的小范围内,磁场存在各向同性失真现象(参见图3a中P2、P3、P4附近的等值云图)。


图4 通入不同线圈电流组合时,XZ平面内磁场分布云
3.2 模型的修正
由式(5)得知,在原点附近区域,平衡点位置与归一化有效驱动电流成线性关系,下面将根据ANSYS仿真计算验证该关系是否准确描述设计的装置。当线圈电流为图4中b、c、d 3种组合时,沿轴向的磁感应强度分布如图5所示。图中磁感应强度曲线的最低点斜率为零,即为磁力平衡点。对比沿x轴和z轴的分布可见:b的平衡点位于原点,c向z正轴偏移55 μm,d向x正轴偏移55 μm。

图5 磁感应强度沿轴线的分布

表1几种电流组合下,平衡点沿z轴的归一化位移

^IΔ^Ix'归一化^z1020-10201020-1020[]T009.520-9.52010.520-10.520[]T-1200.033920-9201120-1120[]T-2200.0688.520-8.52011.520-11.520[]T-3200.097820-8201220-1220[]T-4200.13
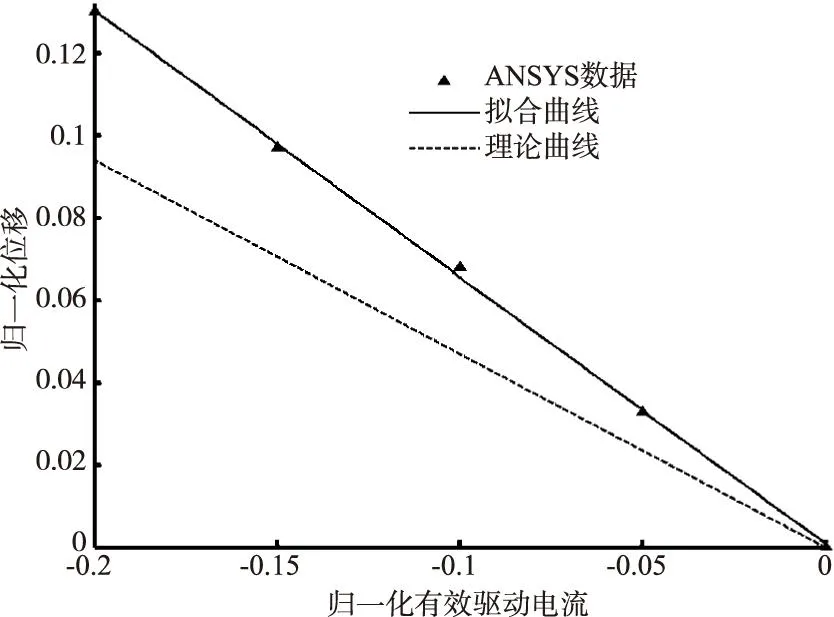
图6 理论曲线和ANSYS仿真拟合的曲线
4结束语
采用SolidWorks和ANSYS相结合的方法设计了一个四极子电磁驱动装置,在垂直面内实现了对磁球的捕获和2D位移线性控制。在已有力学模型基础上,采用ANSYS仿真修正了理论计算,以准确描述设计的装置。仿真结果表明,通过控制施加的电流矢量,该装置能够在XZ平面内产生2D方向的磁力,在工作中心附近区域内线性地移动磁阱平衡点,将磁球稳定到所期望的位置。设计及仿真结果为电磁驱动装置用于理论和实验的研究提供了参考。
参考文献:
[1]于洋.磁镊技术的研究[D].安徽:中国科学技术大学,2010.
[2]GleichB,HellwigN,BridellH,etal.Designandevaluationofmagneticfieldsfornanoparticledrugtargetingincancer[J].IEEETransactionsonNanotechnology,2007,6(2):164-170.
[3]KollmannsbergerP,FabryB.High-forcemagnetictweezerswithforcefeedbackforbiologicalapplications[J].ReviewofScientificInstruments,2007,78(11):114301-114306.
[4]BijamovA,ShubitidzeF,OliverPM,etal.Quantitativemodelingofforcesinelectromagnetictweezers[J].JournalofAppliedPhysics,2010,108(10):104701-104709.
[5]ZhangZ,HuangK,MenqC-H.Design,implementation,andforcemodelingofquadrupolemagnetictweezers[J].IEEE/ASMETransactionsMechatronics,2010,15(5):704-713.
[6]ZhangZ,HuangY,MenqC-H.Activelycontrolledmanipulationofamagneticmicrobeadusingquadrupolemagnetictweezers[J].IEEETransactionsonRobotics,2010,26(3):531-541.
[7]王晓玲,张兴华,魏孔吉,等.一种改进型单分子操纵装置及其应用[J].物理学报,2008,57(6):3905-3911.
