一种基于海量船舶轨迹数据的细粒度网格海上交通密度计算方法*
2016-01-26 06:22:53宁建强,黄涛,刁博宇等
计算机工程与科学 2015年12期
关键词:细粒度
一种基于海量船舶轨迹数据的细粒度网格海上交通密度计算方法*
修回日期:2015-10-23
通信地址:100029 北京市朝阳区北三环东路15号北京化工大学信息科学与技术学院Address:College of Information Science & Technology,15 Bei Sanhuan Rd East,Chaoyang District,Beijing,100029,P.R.China
宁建强,黄涛,刁博宇,赵瑞莲,毕经平
(1.北京化工大学信息科学与技术学院,北京 100029;2.中国科学院计算技术研究所,北京 100190)
摘要:在“一路一带”的战略构想下,对于海上贸易的关注逐渐升温。海上运输是海上贸易的承载,掌握细粒度的海上交通密度,对于提取热点航道热点区域、分析全球贸易走势、推断海上交通连通性及相关的异常检测等具备重要的意义。提出了一种面向海量船舶轨迹数据的细粒度网格海上交通密度计算方法,该方法将全球划分为0.01°*0.01°的标准化细粒度网格,一方面为了适应细粒度网格对全球船舶真实轨迹数据特点设计了针对性的预处理方案,处理了异常点和停泊点;另外一方面设计并实现了一种面向该网格的利用海量轨迹数据对信息发送数目、信息发送间隔、经过船舶数目、经过船舶时间等多维交通密度特征进行量化计算的方法,具备良好的拓展性。最后采用2014年2个月共计8亿余条数据对该方法的性能、准确性进行了评估验证,证明了该方法的切实可行性。
关键词:AIS;细粒度;交通密度
1引言
海运经济是带动经济全球化发展的重要一环,日益频繁的船舶活动和不断增加的船舶数目,使全球海事环境更加复杂多变,由此引发的一系列水运安全隐患也接踵而至。对于海事监管部门而言,实现对海上交通的监管可以为海上贸易分析、经济形势预测、异常船舶行为分析提供数据支持。海上交通密度是单位时间单位区域内船舶活动情况的表征,在很大程度上反映了不同区域船舶活动的情况,是交通流十分重要的参数,也是判别交通流状态的一个重要指标[1],是海事监管部门实现海上交通监管的重要依据。因此,实现海上交通密度的计算是非常有必要的。
与陆地交通运行的方式不同,海上交通并不存在“固定道路”,两点之间的行驶路线往往是不确定的。船舶自动识别系统AIS(Automatic Identification System)收集了丰富的船舶位置信息,且包含了船舶身份的唯一标识MMSI(Maritime Mobile Service Identity)[2],这就为我们实现海量船舶信息下交通密度计算提供了充分的可行性。在一些海事监管型系统(如SeeCoast系统、BAE系统[3])中,海上交通密度是通过计算一段时间内某一位置附近的AIS信号数目来实现的。这样的方法虽然可以反映船舶活动聚集区域的信息,但无法表征船舶“运动”的属性。
为了实现海上交通密度的准确表征和计算,将结果用于海事监管活动的实践之中,本文依托地理经纬度划分的思想,提出了一种以细粒度网格为最小计算单元、充分考虑了船舶“运动”属性的计算方法,从信息发送数目、信息发送间隔、船舶经过数目、船舶经过时间等多个维度表征和计算了海上交通密度。通过采用真实的AIS数据进行计算和实验对比分析,表明了该方法计算的密度结果准确性高,同时可以满足实时系统使用的响应要求。
2背景
海上贸易的升温使得政府部门对于海事活动的监管越来越重视,获取海上交通的状况是监管部门实现监管的第一步也是最为重要的一步。在陆运领域,交通密度是指一条车道上车辆的密集程度,即在单位时间内某一车道单位长度上的车辆数,又称车流密度[4]。而在水运领域,这一概念也可相应地被借鉴为某一时间段某一水域范围内船舶的数目,水上交通密度可以很好地反映某一水域的交通繁忙程度。传统的密度计算方式如人口密度、道路交通密度等主要是通过大规模调研[5]和路网监控系统的数据采集[6]后进行的统计分析,这类方式存在的问题主要包括时间开销大和准确性无法保证等。
AIS是一种用于船舶之间、船岸之间自动应答和识别的船舶避碰系统,由AIS船台和AIS岸站系统组成[7]。AIS标准自创立以来,受到了多方海事管理部门的充分肯定。SOLAS(international convention for the Safety Of Life At Sea)公约于2004年开始提出了AIS的相关要求,截止到2008年7月1日,航行于国际航线300总t以上的船舶,航行于非国际航线500总t以上的船舶,都必须配备AIS[8]。
AIS所提供的数据信息主要包括船舶动态信息和静态信息两类。利用AIS进行交通密度的计算研究主要应用的是动态AIS数据。动态AIS数据是船舶在海上作业(航行或停泊)时,定期发送(船位最快2 s,最慢3 min报告1次)[9]的状态信息数据,包括GPS时间、终端码MMSI、编码类型、命令类型、纬度、经度、航向、首向、速度、转向率等。在AIS提供的动态数据中,MMSI可以作为船舶身份的唯一标识,除了GPS时间、经度、纬度之外,其他信息的真实性往往会被许多人为因素所破坏[10]。
AIS动态数据的特征为我们进行海上交通相关的研究提供了充足的现实可能性,但相关的研究和应用数量十分有限。英国海洋管理协会MMO(the Marine Management Organization)在文献[11]中利用了MCA(Maritime and Coastguard Agency)提供的既有数据计算了2012年英国周边水域的船舶航行的繁忙程度;文献[12]分析并可视化地再现了美国东海岸的某港口不同类型船舶的航行活动;文献[13]利用Apriori关联规则挖掘算法对中国辽东半岛附近水域的船舶行为模式进行了挖掘和分析。文献[11~13]除了需要经过繁琐的数据预处理过程外,也仅针对特定部门的应用,具有区域局限性,这显然无法满足“全球化”发展的战略要求。Scheepens R等人在文献[14]中提出了一种基于可视化展示的交通密度和异常分析方法,但该方法并没有提出量化的数据交通密度表征方法。Baldacci A和Carthel C在文献[15,16]中提出并运用了一种划分网格并统计信息覆盖率作为海上交通密度表征的方式,这种方式已被若干海事监管的原型系统所使用,但该方法仅从信息覆盖率的角度认识交通密度,不够全面和精确。Giuliana P等人[10]提出了基于AIS数据对海上交通建模的方法,但是该方法建模的对象是单一船舶,因此并不能表征一个区域的交通态势。
针对海上交通密度研究区域局限性、量化表征不全面、缺乏区域表征等问题,本文丰富了海上交通密度的表征方式,提出了一种可以应用于全球范围内基于AIS所提供的海量船舶位置信息的密度计算方法,通过不同类型的值,量化地反映了不同区域多个维度的海上交通密度。
3细粒度网格交通密度计算方法
在不存在“固定道路”的情况下,为了计算和表征不同区域的海上交通密度,全球地理范围将会依照经纬度的跨度划分为若干大小相等的网格来作为交通密度的表征单元。以海量的AIS信息(包括船舶身份、时间、位置信息)为输入,我们可以获得不同船舶的信息集合,并通过在时间上相邻的点构成船舶的“航段”。在AIS数据获取的过程当中,由于人为的错误操作、船舶伪装、信号丢失等原因可能造成信息的缺失和错误[16],为了确保计算的准确性,在开始计算之前,需要依据船舶在网格间运动的特点对数据进行预处理。在去除干扰因素后,计算不同船舶在不同网格内的密度信息,最后可以得到不同网格的密度信息。
与文献[9,14,15]中的方法仅通过AIS信息覆盖来表征海上交通密度不同,本文方法用多维特征表征海上交通密度。这些特征包括:信息发送数目(DynamicDataCount)、信息发送间隔(MessageSendInterval)、经过船舶数目(VesselCount)、船舶经过时间(CrossingTimeSum)。其中,信息发送数目和间隔以信息发送的情况为基础,体现了船舶聚集的“静态”属性特征,而经过船舶数目和船舶经过的时间则从船舶航行的路线和运行的速度方向考虑,反映了船舶航行的“动态”特征。图1展示了该计算方法的基本流程。

Figure 1Fine-grained grid traffic density calculation process
图1细粒度网格交通密度计算方法流程
3.1 网格构建
海上交通尤其是远洋交通并没有像陆地上一样严格成型的道路,因此海上交通密度无法像陆地交通那样利用道路流量来计算衡量。以地理经纬度划分的思想为基础,将全球区域构建为不同的网格,可以为海上交通密度提供可用的计算单元,为海上交通的管理提供规格化的支持。
不同粒度大小的网格可以反映不同精度的交通密度信息,过大的网格可能包含多个重点关心的区域,这会失去交通密度计算的意义。全球海洋总面积多达36 110万km2,超过了全球总面积的70%,而一艘大型的货轮的长度一般不会超过400 m,宽度不会超过60 m。在实际应用中,为了更加精准地追踪船舶的行为,网格划分的粒度可达0.01°*0.01°,约合1 km*1 km的范围,即每跨过一个网格,相当于一艘普通货轮移动两到三个船位。
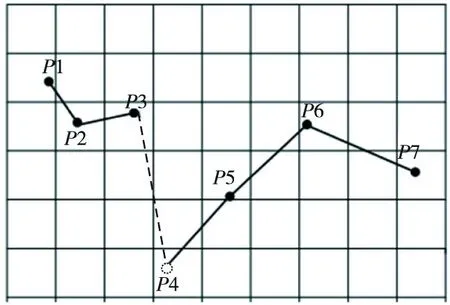
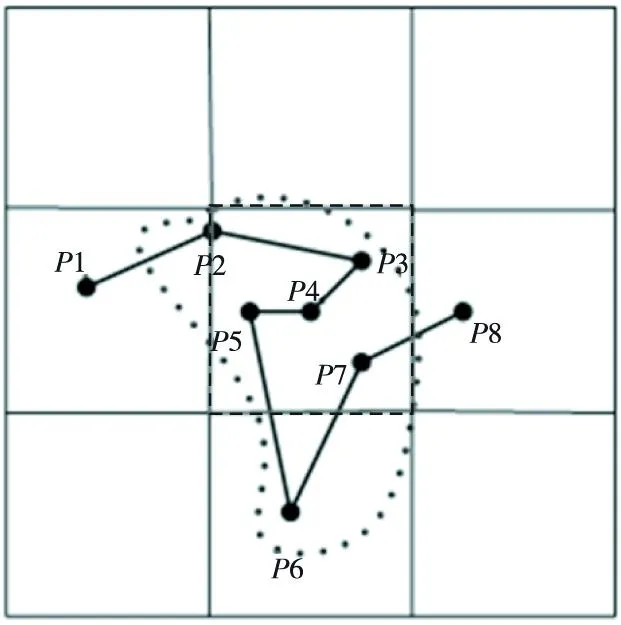
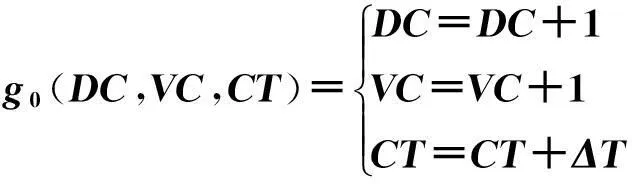
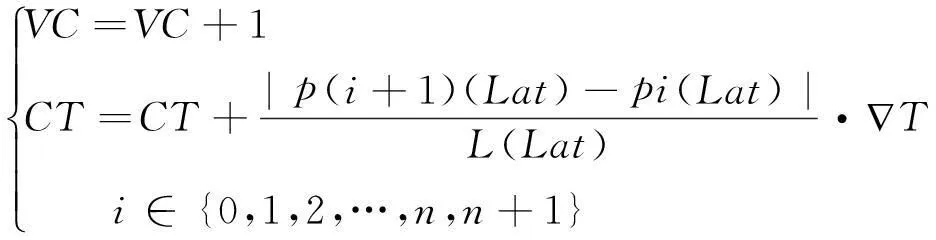
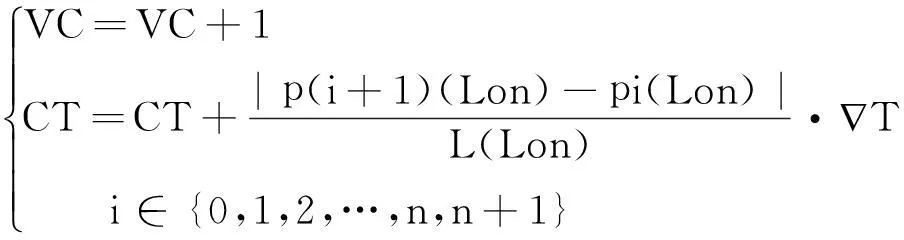
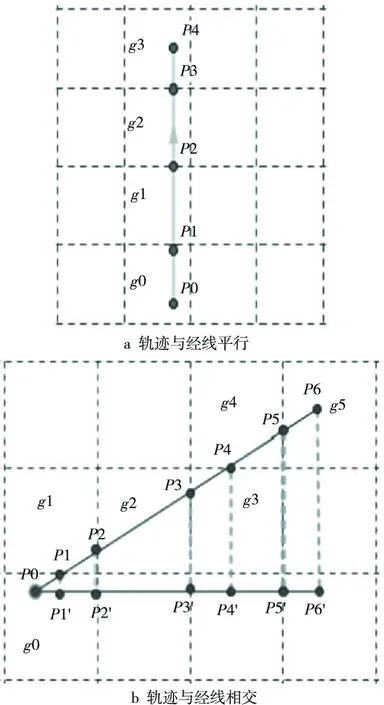
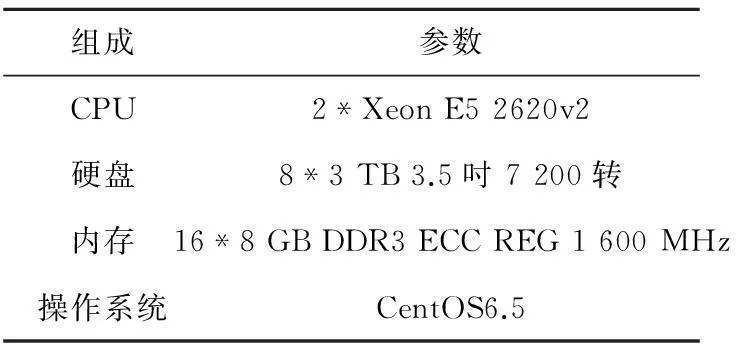
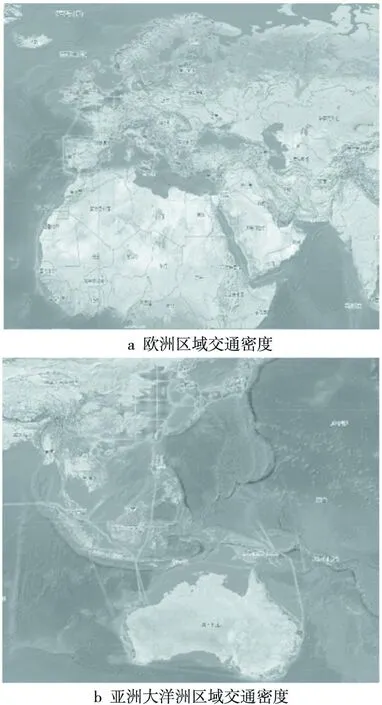
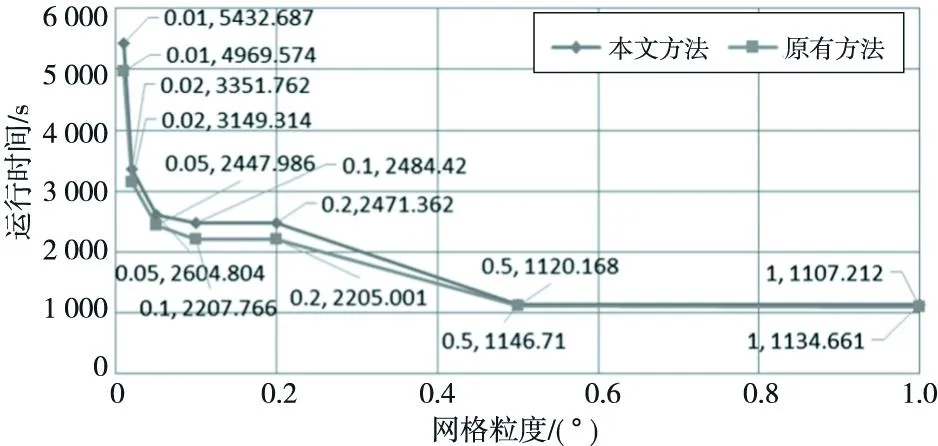
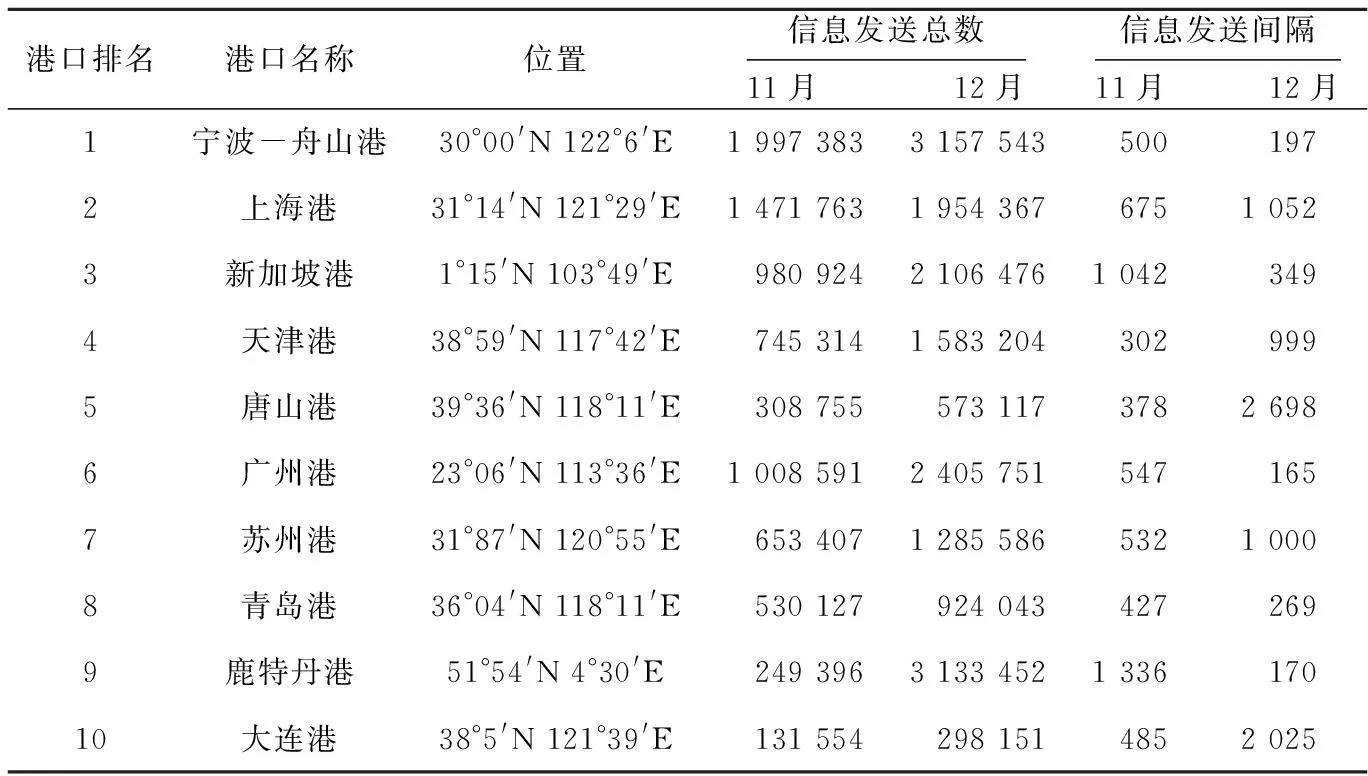
网格划分后,全球范围由集合G={gi |0 如第2节所述,AIS可以快速收集丰富的船舶身份信息和位置信息,在较短的时间内,船舶运动可以近似认为是匀速直线运动,连接任意在时间上邻接的两点,就构成了船舶的一条航段lps,pe(ps为航段起始点,pe为航段终止点)。对于某一船舶的记录集合P0={p01,p02,…,p0n},第一步是按照记录时间升序排列得到有序集合P={p1,p2,…,pn},其中每个记录点为piLon,Lat,T(Lon、Lat代表的是p的经纬度坐标,T则指代当前数据的记录时间)。 在排序完成后,要根据记录分布的特点对数据进行进一步的处理,主要包括异常点和停泊点两种类型。 (1) 数据异常点。 船舶在航行过程中,短时间内的速度是相对稳定的,同时船舶航行的速度在理论上也不会超过设计最大值。AIS信号的丢失和错报的情况可能导致相邻数据点之间船舶航行速度的计算值不合理,为了避免这类错误对结果带来的不利影响,在进行计算之前要首先去除这些不合理的因素。因此,两点之间的速度大小可以作为判断数据是否不合理的标准,即: 其中,v[pi,p(i+1)]是集合P中在时序上相邻两点间的速度(单位是海里/小时),分子中Distance()函数将pi和p(i+1)的经纬度信息转化成实际的距离(单位是海里),分母则计算了两点的记录时间差(单位是小时)。当上式的结果大于阈值v_max时,我们认为p(i+1)属于数据异常点。 本方法针对异常点的处理方法是将原集合P以p(i+1)为中心,拆分为两个集合P1和P2,其中,pi为P1的终止点,p(i+1)为P2的起始点。这样既避免了过大跨度的错误,又可以保留最充足的原始数据信息。如图2所示,由于v[p3,p4]>v[max]且p4为数据异常点,因此将原集合P={p1,p2,…,p7}拆分为P1={p1,p2,p3}和P2={p4,p5,p6,p7}。 Figure 2 Abnormal data points图2 数据异常点 (2) 数据停泊点。 船舶在海上的行为除了航行等动态行为之外,还包括捕鱼、停泊等静态行为。由于船舶的停泊方式的特殊性,船舶的静态行为并非完全的静止行为,当船舶在某一位置(如锚地、渔区)停留时,位置往往会随着水流或风向发生变化,如果计算网格粒度足够小,可能会出现在不同的网格循环往复运动的情况,实际上船舶可以被看作始终停留在初始位置,这样的位置即停泊点。如果仅按照原始数据处理,会出现重复计算船舶出现次数的错误。 滑动窗格的方法可以解决上述的问题,对于任意一个集合P,设置窗格的大小为n,当从pi到p(i+n-1)的所有连续的记录点中有超过80%的记录点落在同一网格中,我们就认为该船处于“静态”行为当中,这些点的位置统一化为他们初始位置网格的中心点。如图3所示,设定移动窗格的大小为6,从p2到p7的运动过程中,超过80%的点都落入了同一网格中,因此以上点统一化为p2所在网格的中心点。 Figure 3 Data mooring图3 数据停泊点 数据预处理之后,可以得到不同的包含船舶轨迹记录的数据集合P={pi|1 对于每个航段而言,起始点为ps,终止点为pe,那么船舶走过该航段的时间和经纬度跨度分别为: ΔT=pe(T)-ps(T) LLon=pe(Lon)-ps(Lon) LLat=pe(Lat)-ps(Lat) 其中,LLon和LLat作为两点之间的距离度量,单位与经纬度的单位相同。 若ps和pe都属于同一个网格g0,那么我们将认为该船舶处于“停泊点”位置,因此只计算其所在网格的信息发送次数DC和船舶停留时间CT,而不对经过的船舶数目VC做多余计算,即: 若ps和pe属于两个网格g0和gn+1(n为船舶经过的网格数目),则要根据他们所处的不同位置及航段穿过的网格来计算不同的密度信息。 g0和gn+1中信息发送的数目DC会增加,从g0到gn+1的每个网格中,经过的船舶数目VC和船舶经过的时间CT也会增加。 从ps到pe的运动是匀速直线运动,因此可以通过计算网格中每个网格所占据的航段长度占航段总长度的比例来得到船舶经过的时间。以赤道中心点为原点,经度递增方向为X轴正向,纬度递增方向为Y轴正向,每个航段就是该直角坐标系内的一条线段,求解网格中船舶停留时间的问题就转化为了求解网格中线段的长度问题。然而,直接求解线段长度不仅公式复杂,且计算量大,容易造成性能的瓶颈。为了尽可能地降低算法的复杂度和运算的时间开销,使算法可以在应对海量数据时满足实际应用的性能要求,本文通过求解投影长度而不是求解点距来作为时间的度量,这种方法利用了船舶瞬时匀速运动的特性,保证准确性的前提下大大降低了运算的开销。 如图4a所示,当LLon=0,即ps和pe的连线平行于经度线时,ps和pe连接的线段所在直线的斜率不存在,除了起始网格g0和终止网格gn+1之外,船舶在其他网格中经过的时间都是相同的,经过时间占据航段总时间的比例均为当前网格的宽度与该航段总长度的比值,则网格各密度特征的计算为: g0(DC)=DC+1 gn+1(DC)=DC+1 如图4b所示,当LLon≠0,即ps和pe连接的线段所在直线的斜率存在时,可以将该航段对应线段投影在X轴的方向,除了起始点和终止点之外,任意两个投影点之间的距离与投影总长度L(Lon)的比值即为网格中船舶经过时间占据航段总时间的比例。网格各密度特征的计算为: g0(DC)=DC+1 gn(DC)=DC+1 Figure 4 Relationship between segment and the location of the grid图4 航段与网格的位置关系 依据3.2节中的方法,依次遍历所有船舶的每个航段,我们可以计算出每个网格中包括信息发送总数、信息发送间隔、船舶经过的总时间等海上交通密度特征。其中信息发送总数不仅可以作为船舶高频出现区域探测的证据,同时也可以为探测信息发送盲区和海上停泊区提供数据参考,以此作为信号接收基站位置选取的重要决策支持。船舶经过的总时间和经过的船舶总数则充分关注了船舶所经过的航段,为后续工作中的航道发现和异常检测提供了原始数据支撑。 进一步,我们计算了一段时间内的信息发送的间隔。影响船舶活动的因素复杂而多变,短期内的频繁活动会使一段时间内某网格的信息发送总数增加,但却并不一定能准确反映该区域较长时期内的交通密度情况。信息发送间隔将船舶经过时间的因素加入考虑,从信息发送速率的角度反映了在一段较长的时间内每个网格区域内的信息发送的整体情况,可以有效地反映船舶活动过程中信息发送速率的特征,其计算公式为: 4结果展示和实验分析 在第3节中,我们已提出了针对全球海上交通密度的计算方法,计算结果包括了不同的密度特征。表1列出了此次实验运行环境的配置,表2列出了此次实验采用的数据。 Table 1 Configuration of the Table 2 Experimental datasets 海事活动中,船舶航行的周期比陆地长,距离也可能更远,为了准确反映某一地区的交通密度,本实验交通密度的计算周期将以月为单位,滑动窗格的大小设置为10,速度阈值vmax设置为120km/h(约64海里/小时),所采用的数据是自2014年11月1日至2014年12月31日的AIS真实信息。为了验证算法的正确性,我们将算法得出的结果与公布的全球范围内最活跃的港口数据作对比进行验证 热图(Heatmap)展示是一种可以直观展示不同区域参数数值的一种图示展示方式,我们采用了超图(SuperMap)[17]的方式实现了对结果的可视化展示。 从图5可以看出,全球范围内经过船舶数目较多的区域集中在了中国东南沿海、欧洲大部以及美国西海岸区域,其中以中国东南沿海地区密度最高。 Figure 5 Global maritime traffic density(the number of passing vessels)图5 全球海上交通密度(经过船舶数目) 从图5中可以清晰地看到,在各个高密度区域之间的“航行路线”,由此可以看出经过船舶数目这一交通密度特征对于全球航运连通性的发掘和研究意义重大。 图6列出了局部区域内的船舶经过总数的密度信息。从图6a中可以看出,欧洲西部的贸易繁忙地区中活跃船舶的总数要明显多于东欧地区。从图6b则看出了中国东南沿海地区船舶活动数目远高于其他区域,这也印证了整个亚洲地区内,船舶出现数目和海上贸易发达程度最高的地区分布于中国领海周边的事实。 Figure 6 Local maritime traffic density(number of passing vessels)图6 局部海上交通密度(经过船舶数目) 与文献[9,14,15]中仅计算AIS出现数目的方法相比,本文方法扩展了海上交通密度的表征特征。以2014年11月数据的计算结果为例,由图7可以看出,本文方法输出结果比原有方法更加丰富,并且与原有方法中遍历网格的思路相比,在运算速度上有所提高。 当网格粒度大于0.1°时,运算时间控制在了2 500s之内,随着网格粒度的进一步缩小,运算时间呈增长趋势,当达到0.01°时,运行时间接近5 500s,在单机运行的环境下,该算法可以满足实际数据分析的需求。 Figure 7 Algorithm running time图7 算法运行时间 表3列出了《2014全球港口发展报告》中世界前十大港口的信息以及在网格密度计算中对应位置所得到的密度信息。由表3记录可以看出,在2014年全球范围内水上交通密度最高的世界十大港口区域内,其信号发送总数和经过船舶数目和停留时间的数值也相对较大,名次均位于全球范围的前列。其中,格子坐标为(30N,122E)的网格信号发送总数在这两个月中都是排在全球第一位的,其所属的位置恰在排名第一的宁波-舟山港口附近;坐标为(39N,118E)和(23N,113E)的网格信息发送间隔分别是这两个月中是全球范围内最小的,它们恰好位于繁忙的天津港区域和广州港区域。 5结束语 海上交通密度是反映海洋船舶活动的重要特征之一。本文提出了一种基于海量船舶位置数据的全球海上交通密度的计算方法,将海上交通分析的区域扩展至了全球,并丰富了海上交通密度的量化特征指标。我们通过真实数据进行实验得出的密度计算结果,以可视化的热图形式对密度计算结果进行了直观的展示和分析,并通过性能测试证明了该算法的可行性,最后将运行结果与官方公布的水上交通热点区域进行了比较,验证了该算法的准确性。 海上交通密度的分布是海上交通情况最直观的表示,在后续的工作中,可以通过挖掘连续的密集区域为航道挖掘提供原始的数据支持,或者观测同一海域交通密度的变化来实现海事异常监测,最终为海事监管部门提供决策的依据。此外,利用海上交通密度的变化特征对全球海运形势和发展做预测等也可以作为一个重要的研究方向。 参考文献:附中文 [1]HuXiao-wen,YangDong-yuan.Theurbanrapidroadtrafficflowdensityestimation[J].JournalofTransportationSystemsEngineeringandInformation,2008,1(3):79-82. (inChinese) [2]TangCun-bao,ShaoZhe-ping,TangQiang-rong,etal.TheshiptrackdistributionalgorithmbasedonAIS[J].JournalofJimeiUniversity(NaturalScienceEdition),2012,17 (2):109-112.(inChinese) [3]MartineauE,RoyJ.Maritimeanomalydetection:Domainintroductionandreviewofselectedliterature[R]. 2010-460.Quebec:DefenceResearchandDevelopmentCanadaValcartier,2011. [4]Transformationdensity[EB/OL].[2015-05-06].http://baike.baidu.comview1173046.htm. [5]BalmatJF,LafontaF,MaifretR,etal.MAritimeRISkassessment(MARISA),afuzzyapproachtodefineanindividualshipriskfactor[J].OceanEngineering,2009,36(15):1278-1286. [6]YuanChang-feng,LiuDe-qin,CuiXian-guo,etal.BasedontheanalysisofpopulationGISpopulationdensityspatialdistributionofBeijing[J].JournalofYangtzeUniversityNatu- Table 3 World top ten port information in 2014 ral Science Edition:Medical Volumes,2004,1(4):40-42. (in Chinese)[7]Cai Xin-mei. AIS application and development [J]. Mechanical and Electrical Equipment,2011,28 (2):28-30.(in Chinese) [8]Tang Cun-bao,Shao Zhe-ping,Wu Jian-sheng,et al. Based on the research of AIS information density distribution algorithm and implementation [J]. Journal of Guangzhou Maritime College,2012,20 (3):7-10. (in Chinese) [9]Beaudreau T. AIS analysis of maritime traffic density[R].2010-13.Alaska:BOEM(Bureau of Ocean Energy Management),2010. [10]Harati-Mokhtari A, Wall A, Brooks P, et al. Automatic identification system (AIS):Data reliability and human error implication[J].Journal of Navigation,2007,60(3):373-389. [11]Mapping UK shipping density and routes technical[R].1066.UK:Marine Management Organization, 2014. [12]Zhu Fei-xiang, Zhang Ying-jun,Gao Zong-jiang. Data mining research based on the ship’s behavior [J]. Navigation of China, 2012,35(2):50-54.(in Chinese) [13]Scheepens R,Willems N,van de Wetering H,et al. Interactive density maps for anomaly detection[J].IEEE Computer Graphics and Applications, 2012,32(1):56-66. [14]Baldacci A,Fabiani A. Contact-based AIS coverage estimation and distribution[R].NURC-MR Technical Report,2008-001.2008. [15]Baldacci A,Carthel C. Maritime traffic characterization with the automated identification system[J]. NURC-MR Technical Report, 2009. [16]Mazzarella F,Vespe M,Damalas D. Discovering vessel activities at sea using AIS data:Mapping of fishing footprints[C]∥Proc of the 17th International Conference on Information Fusion(FUSION), 2014:1-7. [17]SuperMap[EB/OL].[2014-02-06].http://www.supermap.com/cn/. [1]胡小文,杨东援. 城市快速道路交通流密度的估计[J]. 交通运输系统工程与信息,2008,1(3):79-82. [2]唐存宝,邵哲平,唐强荣,等. 基于 AIS 的船舶航迹分布算法[J]. 集美大学学报(自然科学版),2012,17(2):109-112. [6]袁长丰,刘德钦,崔先国,等. 基于人口 GIS 的北京市人口密度空间分布分析[J]. 长江大学学报自然科学版:医学卷,2004,1(4):40-42. [7]蔡新梅. AIS 应用与发展[J]. 机电设备,2011,28(2):28-30. [8]唐存宝,邵哲平,吴建生,等. 基于 AIS 信息的船舶密度分布 算法的研究与实现[J]. 广州航海高等专科学校学报,2012,20(3):7-10. [12]朱飞祥,张英俊,高宗江.基于数据挖掘的船舶行为研究[J]. 中国航海, 2012,35(2):50-54. 宁建强(1990-),男,山西繁峙人,硕士生,研究方向为数据融合和数据处理。E-mail:2013200762@grad.buct.edu.cn NING Jian-qiang,born in 1990,MS candidate,his research interests include data fusion, and data processing. 黄涛(1992-),男,河南信阳人,硕士生,研究方向为数据融合。E-mail:huangtao01@ict.ac.cn HUANG Tao,born in 1992,MS candidate,his research interest includes data fusion. 刁博宇(1989-),男,山东聊城人,硕士,研究方向为传感器网络和数据融合。E-mail:diaoboyu2012@ict.ac.cn DIAO Bo-yu,born in 1989,MS,his research interests include wireless sensor network, and data fusion. 赵瑞莲(1964-),女,山西忻州人,博士,研究方向为软件测试和软件可靠性。E-mail:rlzhao@mail.buct.edu.cn ZHAO Rui-lian,born in 1964,PhD,her research interests include software testing, and software reliability. 毕经平(1974-),女,山东莱芜人,博士,研究员,研究方向为计算机网络和数据融合。E-mail:bjp@ict.ac.cn BI Jing-ping,born in 1974,PhD,researcher fellow,her research interests include computer network, and data fusion. A fine grained grid-based maritime traffic density algorithm for mass ship trajectory data NING Jian-qiang,HUANG Tao,DIAO Bo-yu,ZHAO Rui-lian,BI Jing-ping (1.College of Information Science & Technology,Beijing University of Chemical Technology,Beijing 100029; 2.Institute of Computing Technology,Chinese Academy of Sciences,Beijing 100190,China) Abstract:The attention to maritime trades is heating up with the strategic plan of “One Belt, One Road”. Maritime transport is significant for maritime trades, and thus getting a fine-grained maritime traffic density is of great importance for extracting hot spots, analyzing global trade trends, inferring maritime traffic connectivity and handling maritime anomaly detection. We propose a fine-grained grid-based maritime traffic density calculation method for massive ship trajectory data, which divides the global area into a standard fine-grained grid of 0.01 * 0.01 degrees. On the one hand, in order to be adaptive to the granular characteristics of global ship real trajectory data, we design a corresponding pretreatment solution to deal with abnormal points and mooring. On the other hand, we design and implement a calculation method for multi-dimensional traffic density features utilizing mass trajectory data of the grid, including dynamic data count, message sending interval, vessel count, and the sum of crossing time, which shows good scalability. Experiments on more than 800 million records of two months in 2014 verify the desirable performance, accuracy and feasibility of the proposal. Key words:AIS;fine-grained; traffic density 作者简介: doi:10.3969/j.issn.1007-130X.2015.12.008 中图分类号:TP393 文献标志码:A 收稿日期:*2015-08-10; 文章编号:1007-130X(2015)12-2242-083.2 数据预处理
3.3 基于网格的密度计算


3.4 密度计算结果

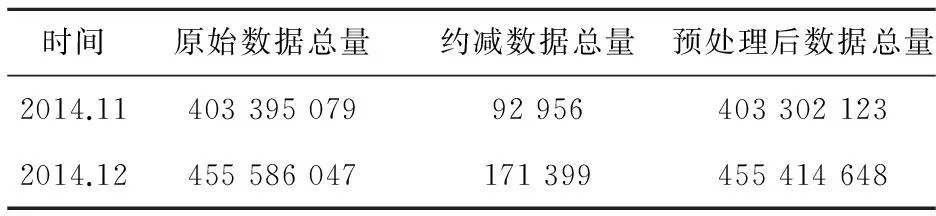
4.1 实验数据
4.2 全球的密度信息图

4.3 算法性能实验
4.4 区域密度分析和数据验证




 猜你喜欢
高技术通讯(2024年2期)2024-03-20 08:21:40红外技术(2022年11期)2022-11-25 03:20:40高技术通讯(2021年1期)2021-03-29 02:29:24安阳工学院学报(2020年2期)2020-06-05 11:06:34电脑与电信(2018年11期)2018-02-16 05:41:32信息安全研究(2016年3期)2016-12-01 06:06:41
猜你喜欢
高技术通讯(2024年2期)2024-03-20 08:21:40红外技术(2022年11期)2022-11-25 03:20:40高技术通讯(2021年1期)2021-03-29 02:29:24安阳工学院学报(2020年2期)2020-06-05 11:06:34电脑与电信(2018年11期)2018-02-16 05:41:32信息安全研究(2016年3期)2016-12-01 06:06:41