Ka频段遥感卫星数据接收系统跟踪性能测试新方法*
2016-01-26 06:38朱维祥,穆伟,王万玉等
电讯技术 2015年5期
关键词:测试方法
Ka频段遥感卫星数据接收系统跟踪性能测试新方法*
朱维祥1,**,穆伟2,王万玉3,冯旭祥3,王永华2
(1.中国西南电子技术研究所,成都 610036;2.中国电子科技集团公司第三十九研究所,西安 710065;
3.中国科学院 遥感与数字地球研究所,北京 100094)
摘要:针对Ka频段低轨遥感卫星数据接收系统跟踪性能测试中的问题,提出了一种新的测试方法。利用设计的Ka频段低轨卫星动态目标模拟数据,采用转动第三轴跟踪标校塔Ka频段信标的方式模拟动态目标的跟踪,在研制的原型系统中开展了接收系统跟踪性能的测试验证。该测试方法可为Ka频段低轨卫星数据接收系统跟踪性能的测试验收提供参考。
关键词:遥感卫星;数据接收系统;Ka频段;跟踪性能;测试方法
1引言
随着对地观测技术的进步以及人们对地球资源和环境认识的不断深化,星地链路需要传输的信息速率越来越高。星地链路信息传输速率的增长,使得采用Ka频段进行星地数据传输成为其发展方向。未来的航天任务将由现在的S、X频段向Ka频段转变[1-2],我国也将在低轨遥感卫星上采用Ka频段下传卫星数据。
Ka频段低轨遥感卫星具有窄波束、高动态等特性,对低轨遥感卫星地面接收系统跟踪性能提出了更高的技术要求[3]。目前,国内外已对Ka频段低轨卫星地面接收系统开展了较深入的技术研究,并开发研制出了原型系统。但遗憾的是目前无在轨运行的Ka频段低轨卫星,对Ka频段低轨卫星地面接收系统跟踪性能的测试只能采用跟踪静态目标(标校塔)[4]、飞机校飞或目标模拟器法的方式。但跟踪静态目标(标校塔)的方式不能测试验证Ka频段低轨卫星地面接收系统高动态高精度等跟踪性能;用飞机校飞是验证跟踪系统跟踪性能可行的方法,通过合理设计航路,能够验证跟踪系统对动态目标的跟踪能力,但此方式存在飞机、空管协调难度大、成本高、费用大等问题;目标模拟器法是用目标模拟器模拟卫星轨道和Ka频段跟踪链路,产生角误差信号,伺服系统依据该误差信号驱动天线运行,测试加速度误差常数,从而测试验证Ka频段跟踪系统跟踪能力,但由于角误差信号与很多因素有关,跟踪链路模拟实现难度大,且不同的系统有差别(如方位/俯仰归一化差方向图、交叉耦合、定向灵敏度等不同),通用性较差。因此,开展Ka频段低轨卫星地面接收系统跟踪性能测试方法的分析研究,为工程系统的开发研制、测试验收提供方法和依据,降低系统跟踪、接收Ka频段低轨卫星数据的技术风险,已成为地面接收系统建设中一项重要和关键的技术需求。
本文依据Ka频段低轨卫星跟踪的技术需求,设计了低轨卫星动态目标模拟数据,利用方位/俯仰/第三轴(可全方位转动,倾角7°)天线座架结构的特点[5],采用转动第三轴的方式跟踪标校塔Ka信标,动态模拟跟踪Ka频段低轨卫星,测试验证接收系统的动态跟踪能力。该方法已成功用于遥感卫星地面站的验收。
2测试方案设计
2.1测试原理及可行性分析
Ka频段波束非常窄,且低轨道极轨卫星目标的运动速度很快。因此,如何测试验证遥感卫星数据接收系统对高动态、窄波束目标的高精度跟踪能力成为急需解决的问题。
针对现有跟踪性能验证测试方法存在的不足,利用方位/俯仰/第三轴(可全方位转动,倾角7°)天线座架结构的特点,本文提出了采用方位俯仰保持自跟踪,同时转动第三轴的方式跟踪标校塔Ka信标,动态模拟跟踪Ka频段低轨卫星,测试验证接收系统的动态跟踪能力的方案。
方位/俯仰/第三轴天线座架结构的第三轴在跟踪实际卫星目标时主要用于置位,目的是有效地降低测站坐标系跟踪仰角,实现全空域无盲区跟踪。根据三轴座架的特点,当方位和俯仰处于自动跟踪标校塔信标信号的状态时,如匀速、匀加速或匀减速转动第三轴,方位轴也将匀速、匀加速或匀减速反向转动,以确保天线系统对标校塔信标的自动跟踪状态。因此,可以利用预先设计的航路使第三轴(平台)随动,同时保持方位俯仰对标校塔信标进行跟踪,以此模拟目标的运动。
在低轨卫星的实际跟踪过程中,天线所需的最大角速度、最大角加速度均出现在方位轴上,俯仰在过顶前后对天线的角速度及角加速度要求不高,因此利用第三轴的转动模拟实际目标的角加速度来测试验证Ka频段低轨卫星接收系统方位的跟踪能力是可行的。同时第三轴是7°斜面,在转动过程中俯仰上也有一定的角速度及角加速度变化,也能验证俯仰上的跟踪能力。
该方案不需要增加任何的设备(利用地面接收系统的跟踪链路),仅需由软件依据卫星轨道生成Ka频段低轨卫星的最大动态性能的模拟试验数据,测试验证Ka频段低轨卫星的跟踪性能。该方案避免了目标模拟器法产生角误差信号的技术难点,也解决了跟踪静态目标(标校塔)方法不能测试验证Ka频段低轨卫星地面接收系统高动态高精度等跟踪性能的问题。
2.2测试方法
本文采用匀加速、匀减速转动第三轴模拟Ka频段低轨卫星的最大跟踪动态性能的方案,测试验证Ka频段低轨卫星的跟踪性能。
2.3模拟试验数据
太阳同步轨道卫星相对于地面接收系统的动态性能可由以下公式确定[6]:



按照7°斜面三轴天线座跟踪正过顶卫星时天线最大跟踪仰角为83°计算,不同轨道高度的正过顶卫星对天线系统的最大角速度及最大角加速度要求见表1。
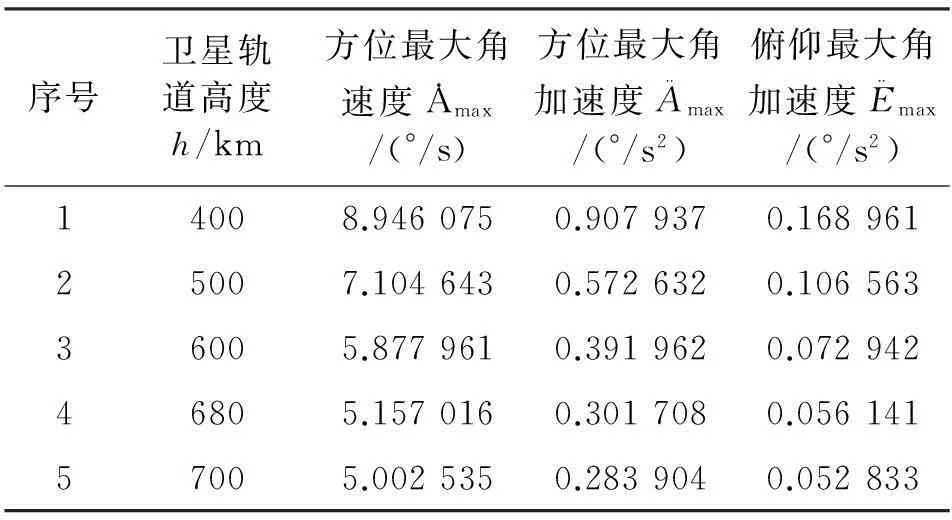
表1 不同轨道高度卫星过顶时天线所需的
从计算结果可以看出,天线过顶时最大角速度及最大角加速度出现在方位上,过顶目标俯仰的角速度、角加速度均不高,因此可以利用第三轴转动验证方位的最大角速度及最大角加速度是否能满足Ka频段的跟踪性能。
2.4测试步骤
(1)天线跟踪系统参数设置正常,并对标校塔进行Ka频段跟踪检查,标定定向灵敏度参数;
(2)以手动工作方式将天线对准信标塔,若接收电平指示装置所指示的信标信号电压为最大时认为天线波束中心已对准信标,记录Uimax;
(3)按照卫星轨道高度、仰角90°计算天线方位轴需要的最大角加速度;
(4)天线对信标塔Ka频段进行自动跟踪;
(5)天线第三轴按照步骤3计算的角加速度,模拟匀加速、匀减速进行转动;
(6)实时记录跟踪过程中的方位、俯仰角度数据、误差电压(UAi、UEi)、跟踪状态等;
(7)依据跟踪误差电压和跟踪灵敏度计算跟踪角误差。
2.5合格判据
利用跟踪精度数据判断Ka频段跟踪精度是否优于1/10半功率波束宽度(即小于0.006 5°)。
3测试结果及分析
模拟源角加速度0.305°/s2,等效680 km轨道高度的卫星过顶的情况,图1~2不加复合控制(前馈),图3~4加复合控制。

图1 方位跟踪误差电压(不加复合控制)

图2 方位跟踪角误差(不加复合控制)
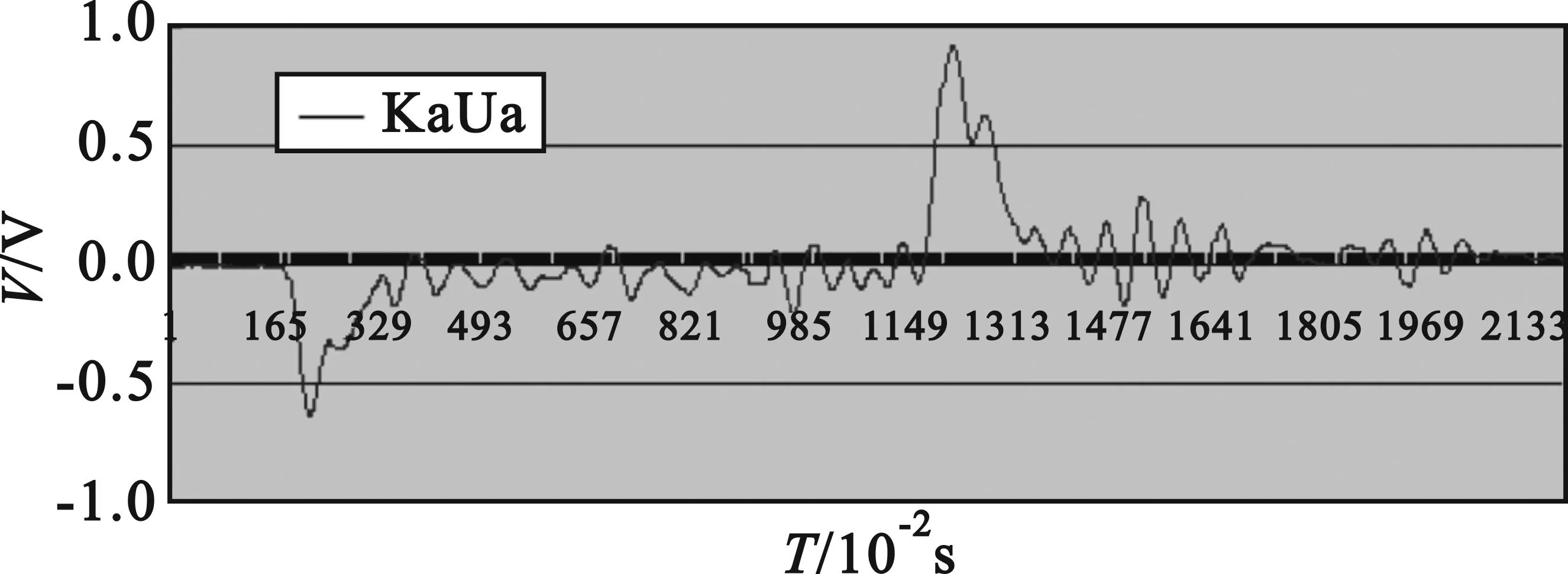
图3 方位跟踪误差电压(加复合控制)
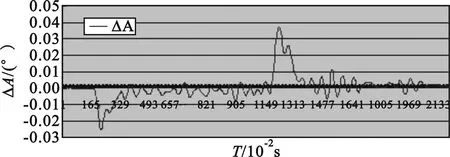
图4 方位跟踪角误差(加复合控制)
测试结果表明:不采用复合控制技术,方位跟踪角误差达到0.032°,大于Ka频段跟踪精度指标要求。测试过程中,天线能够实现对目标的跟踪,但因动态滞后处于自跟的临界状态。采用复合控制技术后,伺服系统动态特性有明显提高,跟踪角误差优于0.005°,能够满足Ka频段的高精度跟踪要求。
记录数据曲线开始及中间出现的较大角误差是天线第三轴启动、第三轴由加速转为减速时造成的。
4结束语
针对方位/俯仰/第三轴天线座架结构的特点,本文提出了一种Ka频段低轨遥感卫星数据接收系统跟踪性能测试的新方法。该测试方法利用设计的Ka频段低轨卫星动态目标模拟数据,采用方位俯仰保持自跟踪,同时转动第三轴的方式跟踪标校塔Ka信标,动态模拟跟踪Ka频段低轨卫星,测试验证接收系统的动态跟踪能力。测试结果表明,用该方法测试验证Ka频段低轨卫星的跟踪性能既简单方便,又切实可行。该方法也可用于测试验证数据接收系统接收其他频段(如S、X频段)高动态目标(如轨道高度200 km左右的卫星)的动态跟踪性能。该方法已成功用于遥感卫星地面站的验收。
参考文献:
[1]王中果,汪大宝.低轨遥感卫星Ka频段星地数据传输效能研究[J].航天器工程,2013,22(1):72-77.
WANG Zhongguo,WANG Dabao. Research on transmission effectiveness of remote sensing data from LEO satellite to Earth at Ka-band[J].Spacecraft Engineering,2013,22(1):72-77.(in Chinese)
[2]Roselló J,Martellucci A,Acosta R,et al. 26-GHz Data Downlink for LEO Satellites[C]//Proceedings of 6th European Conference on Antennas and Propagation.Prague:IEEE,2012:111-115.
[3]王永华,王万玉.S/X/ka频段天伺馈系统关键技术分析[J].电讯技术,2013,53(8):1058-1063.
WANG Yonghua,WANG Wanyu. Analysis of key technology for S/X/Ka-band antenna feed and servo system[J]. Telecommunication Engineering,2013,53(8):1058-1063.(in Chinese)
[4]GB/T 11299.15-1989,卫星通信地球站无线电设备测量方法[S].
GB/T 11299.15-1989,Methods of measurement for radio equipment used in satellite earth stations[S].(in Chinese)
[5]王永华,王万玉.三轴天线标校方法[J].现代电子技术,2014,37(13): 81-84.
WANG Yonghua,WANG Wanyu.Angle calibration method of tri-axis antenna[J],Modern Electronics Technique,2014,37(13): 81-84.(in Chinese)
[6]李连升.雷达伺服系统[M].北京:国防工业出版社,1983.
LI Liansheng. Rader Serve System[M].Beijing: National Defense Industry Press,1983.(in Chinese)

朱维祥(1974—),男,四川人,2008年获硕士学位,现为高级工程师,主要从事飞行器测控通信及遥感接收系统总体技术方面的研究工作;
ZHU Weixiang was born in Sichuan Province,in 1974. He received the M.S. degree in 2008. He is now a senior engineer. His research concerns spacecraft TT&C and remote-sensing receiving system.
Email:zwxmhy123@163.com
穆伟(1981—),男,陕西人,2003年获学士学位,现为工程师,主要从事伺服系统研究工作;
MU Wei was born in Shaanxi Province,in 1981. He received the B.S. degree in 2003. He is now an engineer. His research concerns servo system technology.
王万玉(1962—),男,安徽人,1990年获硕士学位,现为研究员、硕士生导师,主要研究方向为信号与信息处理;
WANG Wanyu was born in Anhui Province,in 1962. He received the M.S. degree in 1990. He is now a senior engineer of professor and also the instructor of graduate students. His research direction is signal and information processing.
Email:wangwy@radi.ac.cn
冯旭祥(1984—),男,湖南人,2009年获硕士学位,现为工程师,主要研究方向为信号与信息处理;
FENG Xuxiang was born in Hunan Province,in 2009. He received the M.S. degree in 2009. He is now an engineer. His research direction is signal and information processing.
王永华(1971—),男,山西人,1994年获学士学位,现为研究员,主要从事雷达测控技术研究。
WANG Yonghua was born in Shanxi Province,in 1971. He received the B.S. degree in 1994. He is now a senior engineer of professor. His research direction is TT&C.
引用格式:朱维祥,穆伟,王万玉,等.Ka频段遥感卫星数据接收系统跟踪性能测试新方法[J].电讯技术,2015,55(5):560-563.[ZHUWeixiang,MUWei,WANGWanyu,etal.ANewTrackingPerformanceTestMethodforKa-bandRemoteSensingSatelliteDataReceivingSystem[J].TelecommunicationEngineering,2015,55(5):560-563.]
ANewTrackingPerformanceTestMethodforKa-band
RemoteSensingSatelliteDataReceivingSystem
ZHUWeixiang1,MUWei2,WANGWanyu3,FENGXuxiang3,WANGYonghua2
(1.SouthwestChinaInstituteofElectronic,Chengdu610036,China;
2.The39thResearchInstituteofChinaElectronicsTechnologyGroupCorporation,Xi′an710065,China;
3.InstituteofRemoteSensingandDigitalEarth,ChineseAcademyofSciences,Beijing100094,China)
Abstract:To solve the problems in the tracking performance test of Ka-band Low Earth Orbit(LEO) remote sensing satellite data receiving system,a new method is proposed. Simulation data is generated by using Ka-band LEO satellite,and dynamic target tracking is simulated with the method of tracking Ka-band beacon on the calibration tower by rotating the third axis of antenna. A verification test on tracking performance of receiving system is carried out in the developed prototype system. The proposed method provides a reference for acceptance test for Ka-band LEO satellite data receiving system.
Key words:remote sensing satellite;data receiving system;Ka-band;tracking performance;test method
作者简介:
中图分类号:TN806
文献标志码:A
文章编号:1001-893X(2015)05-0560-04
通讯作者:**zwxmhy123@163.comCorresponding author:zwxmhy123@163.com
收稿日期:*2015-01-12;修回日期:2015-04-27Received date:2015-01-12;Revised date:2015-04-27
doi:10.3969/j.issn.1001-893x.2015.05.016
猜你喜欢
数学物理学报(2022年5期)2022-10-09
现代经济信息(2020年34期)2020-06-08
电子制作(2019年16期)2019-09-27
电子制作(2019年15期)2019-08-27
电子制作(2018年11期)2018-08-04
钻井液与完井液(2018年5期)2018-02-13
铁道通信信号(2016年6期)2016-06-01
铁道通信信号(2016年4期)2016-06-01
中国洗涤用品工业(2016年2期)2016-02-28
中国资源综合利用(2016年3期)2016-01-22