基于星敏感器指向的船载雷达轴系误差分离模型*
2016-01-26 06:05张同双,钟德安,潘良等
电讯技术 2015年5期
基于星敏感器指向的船载雷达轴系误差分离模型*
张同双1,2,**,钟德安1,潘良1,2,焦宏伟1,2,王二建1
(1. 中国卫星海上测控部,江苏 江阴 214431;2.飞行器海上测量与控制联合实验室,江苏 江阴 214431)
摘要:针对现有船载雷达动态标校方法的不足,提出了一种基于星敏感器的船载雷达轴系误差标校方法。该方法以精确的星敏感器地平指向为比对基准,解算船载雷达的轴系误差。设计了基于星敏感器的船载雷达动态标校方案,分析了船摇测量误差对雷达测角精度的影响,推导了天线座垂向变形引起的雷达测角误差修正模型。根据测量目标的不同,分别建立了联合测星与跟踪目标时的船载雷达轴系误差分离模型。最后通过联合测星试验对轴系误差分离模型进行了验证。试验结果表明,利用动态标校成果修正后的船载雷达方位、俯仰系统残差分别为3″和9″,随机残差分别为40″和45″,满足雷达轴系误差标定要求,具有较高的实用价值。
关键词:船载雷达;星敏感器;轴系误差;动态标定;误差分离
1引言
船载雷达采用单站定位测量体制,轴系误差直接影响测量精度,因此必须对其精确标校。船载雷达轴系误差主要标校方法有坞内标校[1]、卫星标校[2-4]及天文标校[5-7]等。坞内标校的优点是标定项目全面、标定精度高,不足是组织实施难度大、耗资多、周期长,一般只在测量船建成或设备进行较大规模的技术改造后进行[5]。卫星标校和天文标校通过跟踪已知精密星历的卫星或恒星目标,获取雷达的系统误差,根据误差分离模型与算法,解算雷达的轴系误差。卫星标校和天文标校具有保障要求低、操作简便、自动化程度高等优点,但在标校过程中均未考虑船体姿态对标校结果的影响,因而标校结果重复性差,有时严重偏离实际情况。
星敏感器是目前已知的精度最高的载体姿态敏感器件[8]。采用基于星敏感器的分布式船姿测量方案,有望将船姿测量误差对动态标校的影响降至最低,在此基础上,在船载雷达上捷联安装一套星敏感器作为测角元件,可以提供一个不依赖于雷达编码器的、独立的高精度雷达角度测量基准[9],从而提高轴系误差分离精度。
本文在分析现有标校技术的基础上,以星敏感器为船载雷达指向基准,研究了基于星敏感器的船载雷达轴系误差分离方法,分析了船摇测量误差对雷达测角精度的影响,推导了雷达天线座垂向变形测角误差修正模型。根据雷达测量目标的不同,建立了不同的轴系误差分离模型,最后通过试验验证了模型的正确性。
2基于星敏感器的船载雷达轴系误差分离方法
2.1坐标系及其定义
船载雷达甲板坐标系与地平坐标系定义如图1所示,OG-XGYGZG和OJ-XJYJZJ分别为惯导地平坐标系和甲板坐标系。其中,OGXG指向真北,OGYG指向天顶,OGZG与OGXG、OGYG成右手关系;OJXJ沿艏艉线指向船艏,OJYJ垂直于甲板平面向上,OJZJ与OJXJ、OJYJ成右手关系;Ai、Ei分别为测量设备甲板实测方位角与俯仰角。

图1 惯导地平坐标系与甲板坐标系
2.2误差分离原理
基于星敏感器的船载雷达误差分离方法如图2所示,在船载雷达三轴中心附近捷联安装一套星敏感器B,用于精确测量船载雷达的精确地平指向,精度可达角秒量级。由于星敏感器的参考坐标系为地平坐标系,而雷达参考坐标系为甲板坐标系,因此需要将其转换到同一参考坐标系,才能得到船载雷达相对星敏感器B的角度误差。为此,在船载雷达过渡座内安装一套激光陀螺捷联惯导/GPS组合导航系统和双星敏感器组合(星敏感器A,角秒级精度),用于测量天线基座处的船摇角。利用激光陀螺捷联惯导或星敏感器A的船摇测量数据,将雷达测角数据转换到地平坐标系,并与星敏感器B的测角数据进行比较,得到船载雷达的测角误差,在此基础上,根据轴系误差分离模型,解算得到船载雷达的轴系误差。

图2 误差分离原理
3船体姿态对雷达测角精度的影响
3.1船摇测量误差对雷达测角精度的影响
船摇测量误差对雷达地平测角精度的影响如式(1)所示[10]:

(1)
式中,ΔAi、ΔEi分别为由船摇测量误差引起的i时刻雷达方位、俯仰测角误差;ΔKci、Δψci及Δθci分别为i时刻的航向、纵摇及横摇测量误差;Ai和Ei分别为i时刻的雷达实测甲板方位角与俯仰角。
由式(1)可知,航向误差相当于引入了一个方位零位,纵、横摇误差相当于大盘不水平。星敏感器具有极高的船摇测量精度,因此若能获取星敏感器A测量数据,可减小船摇测量误差对标校结果的影响。
3.2天线座垂向变形对雷达测角精度的影响
采用分布式船体姿态测量方案时,船载雷达处的水平方向船体变形可以忽略,天线座垂向变形对雷达测角精度的影响可以由式(2)推导得到[10]:

(2)
式中,Abi、Ebi为经变形修正后的雷达实测甲板方位角和俯仰角;B为变形转换矩阵:
B=Ry(Kbni)Rz(-ψbni)Rx(-θbni),
(3)
式中,Rx(δ)、Ry(δ)及Rz(δ)分别表示Y-Z平面绕X轴、X-Z平面绕Y轴及X-Y平面绕Z轴逆时针旋转δ角后所形成的单位转换矩阵;Kbni、ψbni及θbni分别为i时刻的等效艏挠角、纵挠角和横扭角,它与i时刻的实测艏挠角Kbi、纵挠角ψbi及横扭角θbi存在如下关系:
Kbni=-Kbi,ψbni=ψbi,θbni=θbi。
(4)
假设无变形时的方位角、俯仰角分别为Ab0i和Eb0i,显然Ab0i=Ai、Eb0i=Ei。由式(2)得
tan(Ab0i+ΔAi)=C/D。
(5)
式中,C、D分别为
C=cosAicosEisinKbnicosψbni+
sinEi(cosKbnisinθnbi-sinKbnisinψbnicosθnbi)+
sinAicosEi(cosKbnicosθnbi+sinKbnisinψbnisinθnbi),
D=cosAicosEicosKbnicosψbni-
sinEi(sinKbnisinθbni+cosKbnisinψbnicosθbni)-
sinAicosEi(sinKbnicosθbni-cosKbnsinψbnisinθbni)。
由于变形角为小角度量,则有

根据式(5),并忽略二阶以上小量,可得

(6)
当仰角不是很高时,上式分母项约为1,具体如图3~4所示的仿真曲线。仿真条件:等效艏挠角、纵挠角及横扭角分别为200″、100″和25″,方位角等于45°,俯仰角在0°~90°变化。

图3变形引起的雷达测角误差
Fig.3Radarangularerrorofhulldeformation

图4 雷达测角误差计算误差
由图可知:天线座垂向变形对雷达测角精度具有较大的影响,且随仰角的增加而增大;由忽略分母项引起的计算误差随仰角的增加而增大。当仰角小于87°时,由忽略分母项而引起的最大计算误差小于4.0″,相对雷达测角精度,完全可以忽略,因而当仰角低于87°时,式(6)可以简化为
ΔAi=Kbni+ψbnisinAitanEi+θbnicosAitanEi。
(7)
将等效变形角转换为船体变形角时,有
ΔAi=-Kbi+ψbisinAitanEi+θbicosAitanEi。
(8)
同理,根据式(2)可得
sin(Eb0i+ΔEi)=cosAicosEisinψbni+sinEicosψbnicosθbni-
sinAicosEicosψbnisinθbni。
(9)
忽略相关小角度量并写成船体变形角的形式为
ΔEi=ψbicosAi-θbisinAi。
(10)
由此,由天线座垂向变形所引起的船载雷达角度误差如下所示:

(11)
目前,天线座垂向变形缺乏有效的测量手段,因此该项误差始终存在,且无法修正。
4船载雷达轴系误差分离模型
4.1联合测星时的轴系误差分离模型
此模型适用于标校经纬仪、标校电视及星敏感器联合测星。假设船载雷达采用标校电视跟踪测量恒星目标,星敏感器B同步测星,从而获得星敏感器精确地平指向。
不考虑船体姿态引起的误差时,船载雷达轴系误差分离模型为

(12)
式中,ΔA0、ΔE0分别为雷达甲板方位角零位和俯仰角零位;βm、Am分别为雷达大盘不水平最大倾斜量和最大倾斜方向;δm为横轴差;Sb为标校电视光机偏差;ΔABTV、ΔEBTV是星敏感器B与标校电视间的方位、俯仰光轴不平行度;ΔATVi、ΔETVi分别是i时刻的标校电视方位、俯仰脱靶量。
令X=βmsinAm、Y=βmcosAm,且考虑船体姿态对雷达测角精度的影响时,雷达测角误差为

(13)
由此可知,当船载雷达坐标变换时,测角误差不仅与船载雷达自身测角误差有关,还与船体姿态等有关。此时利用该模型进行动态标校时,只能得到包含相关误差源的等效轴系误差(下同)。
4.2跟踪目标时的轴系误差分离模型
4.2.1目标与恒星光学均可见
假设船载雷达采用电跟踪方式跟踪目标,且目标与恒星均光学可见,星敏感器B跟踪目标的同时测量恒星,从而给出星敏感器B的精确地平指向。
不考虑船体姿态引起的误差时,船载雷达轴系误差分离模型为

(14)
式中,Cs、Ce分别为方位、俯仰光电偏差;ΔUAi、ΔUEi分别为i时刻的方位、俯仰误差电压;CA、CE分别为方位、俯仰支路定向灵敏度;ΔEg为设备重力下垂误差。
同理,考虑船体姿态对雷达测角误差影响时的误差分离模型为

(15)
定向灵敏度参数难以精确标定,因此标校时船载雷达尽量采用电跟踪方式,以减小误差电压对雷达测角精度的影响。
4.2.2目标光学不可见,恒星光学可见
当目标光学不可见、恒星光学可见时,此时相当于星敏感器自主测星,可以标定与电轴无关的轴系误差,具体模型如下:

(16)
5试验结果分析
为验证误差分离模型的准确性,在某船载雷达上进行了海上联合测星试验,试验时,船载雷达标校电视采用电视跟踪方式观测恒星,星敏感器进行同步测星,由此解算船载雷达标校电视光轴相对星敏感器光轴的地平指向残差与轴系误差。图5~6是某次联合测星试验时,船载脉冲雷达与星敏感器B地平指向测量结果。本次试验中,由于星敏感器A有效测星数据较少,因而使用捷联惯导船摇测量数据。本次试验中,标校电视共测到了25组有效恒星数据。
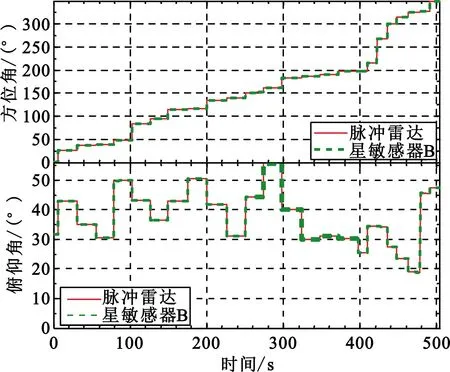
图5 脉冲雷达与星敏感器B地平角
由图5可知,雷达与星敏感器B的地平指向一致性较好。雷达相对星敏感器B地平指向残差如图6所示。
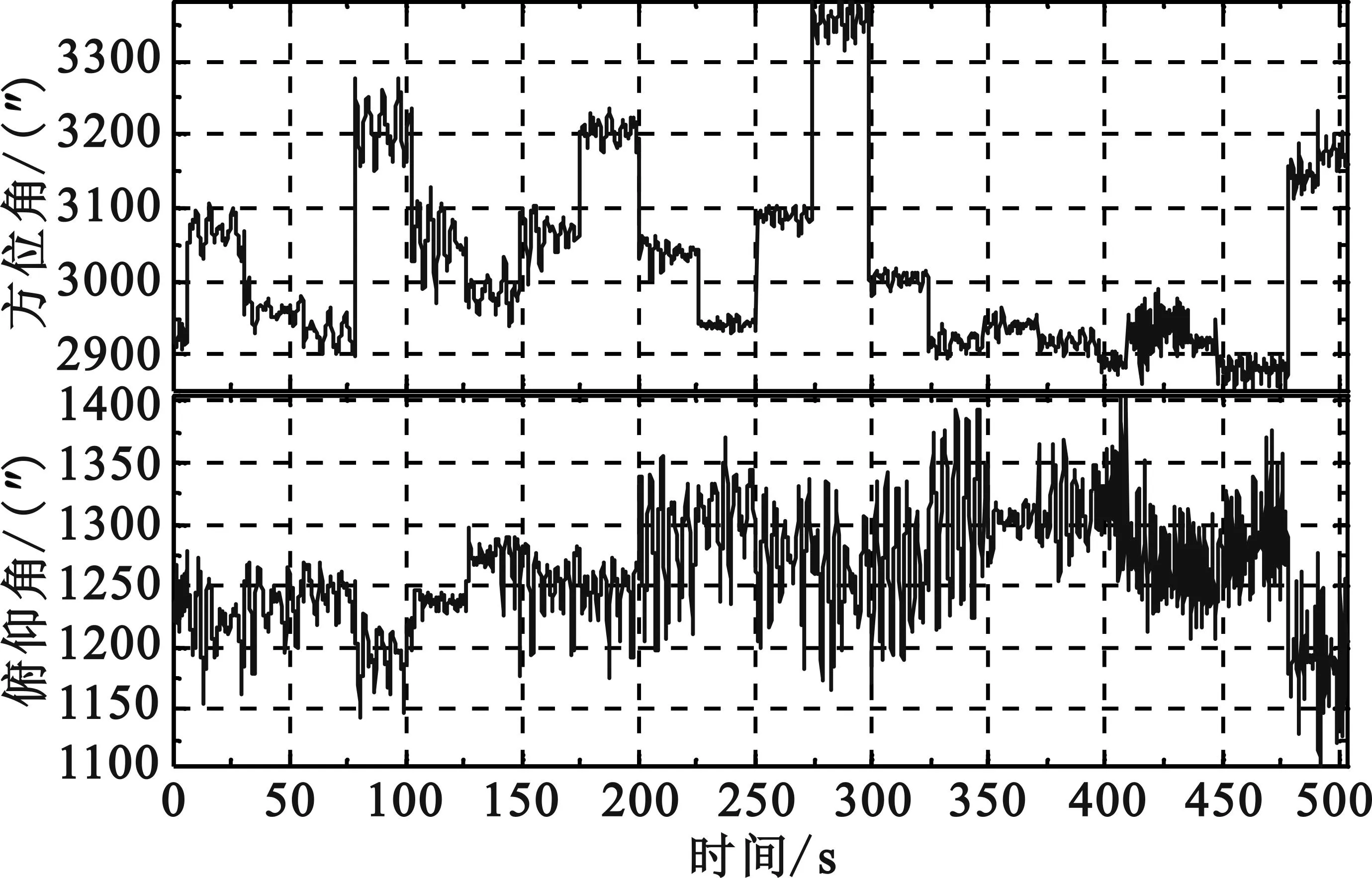
图6 轴系误差修正前船载雷达角度残差
由图6可知,雷达方位角残差随仰角的变化而起伏,俯仰角残差受雷达仰角的影响相对较小,这是受天线座垂向变形、等效大盘不水平及等效光机偏差等的共同影响造成的。雷达相对星敏感器B地平方位、俯仰系统残差分别为0.840 351°和0.350 680°,随机残差分别为0.034 136°和0.012 664°。
根据式(13)所示的雷达轴系误差模型,分别利用最小二乘算法与递推最小二乘算法,进行误差分离,具体结果如表1所示。
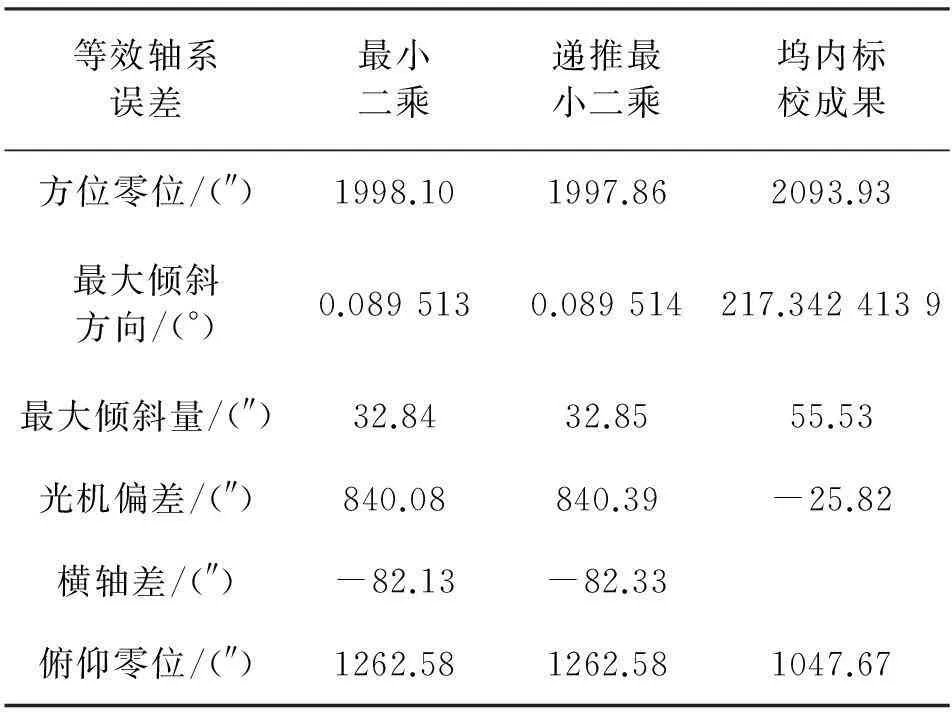
表1 雷达轴系误差动态标定结果
利用该成果对随后进行的测星试验结果进行了试修正,修正结果如图7所示。
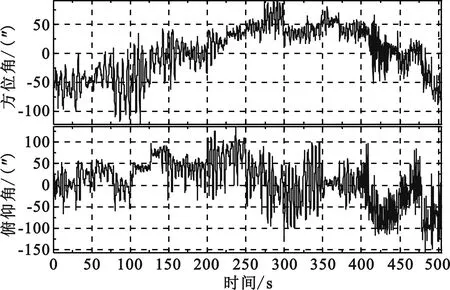
图7轴系误差修正后船载雷达角度残差
Fig.7 Residual error of ship-borne radar after correction
由表1及图7可知:修正后的船载雷达相对星敏感器方位、俯仰系统残差分别为3″和9″,随机残差分别为40″和45″,说明标校成果是可信的;两种算法的解算结果一致性很好,但与坞内标校成果存在较大的差异,这主要是由于船摇测量误差和天线座垂向变形等引起的。
虽然动态误差分离结果与坞内标校成果不具有可比性,但其结果仍具有重要的使用价值,使用该参数进行轴系误差修正,不仅可以消除传统意义上的轴系误差对船载雷达测量结果的影响,还可消除船体姿态等对船载雷达外测精度的影响。
6结束语
不同于基于标校电视的船载雷达动态标校,星敏感器可以提供一个不依赖于雷达编码器的、独立的高精度雷达角度测量基准。在气象条件较好的条件下,甚至可以跟踪测量中低轨空间目标,因而标校方法灵活多样,同时可以消除船体姿态对雷达测角精度的影响,因而具有广阔的应用前景。但由于船体姿态特别是垂直方向的天线座变形对雷达测角精度的影响难以消除,该法难以实现传统意义上的坞内标校项目的标定。后续工作的重点是在现有研究的基础上,如何进一步分离船载雷达自身的轴系误差。
参考文献:
[1]钟德安,崔庆华,张同双,等.航天测量船测控通信设备标校与校飞技术[M].北京:国防工业出版社,2009.
ZHONG Dean,CUI Qinghua,ZHANG Tongshuang,et al. Technology of Calibration and Flight Test for TT&C Ship’s Measuring-communicating Equipment[M]. Beijing: National Defense Industry Press,2009.(in Chinese)
[2]金胜,邓颖丽,朱天林. 脉冲雷达卫星标定方法研究[J].飞行器测控学报,2005,24(4):66-70.
JIN Sheng,DENG Yingli,ZHU Tianlin. Study on Satellite Calibration Method for Pulse Instrumentation Radar[J]. Journal of Spacecraft TT&C Technology,2005,24(4):66-70.(in Chinese).
[3]黄家贵,杨潇. 脉冲测量雷达卫星标校的实现[J]. 系统工程与电子技术,2007,29(10):1600-1602.
HUANG Jiagui,YANG Xiao. Implement of Pulse Radar's Calibration by Measuring Optical Tracking Satellites[J]. Systems Engineering and Electronics,2007,29(10):1600-1602.(in Chinese)
[4]钟霞,张建伟,于灏. 基于最小二乘估计的雷达系统误差卫星标定方法[J].空间科学学报,2013,35(5):554-560.
ZHONG Xia,ZHANG Jianwei,YU Hao. A Method of Satellite Calibration for Radar's System Error Based on Least-square Estimation[J]. Chinese Journal of Space Science,2013,35(5):554-560.(in Chinese)
[5]孙晓昶,皇甫堪. 以恒星位置为基准的运动平台上测控雷达精度标校技术[J].宇航学报,2002,23(3):29-32.
SUN Xiaochang,HUANGFU Kan. Precision calibration of moving platform based radar with stars as reference marks[J]. Journal of Astronautics,2002,23(3):29-32.(in Chinese)
[6]康德永,傅敏辉,赵文华,等. 基于恒星测量的船载雷达轴系误差修正参数动态标定[J].电讯技术,2013,53(7):949-952.
KANG Deyong,FU Minhui,ZHAO Wenhua,et al. Dynamic Calibration for Shaft Parameters of Ship-borne Radiometer Equipment Based on Star Observation[J]. Telecommunication Engineering,2013,53(7):949-952.(in Chinese)
[7]钟德安,张同双,冯鸿奎,等. 基于星敏感器的船载雷达误差修正参数解算方法[J]. 电讯技术,2014,54(8):1077-1081.
ZHONG Dean,ZHANG Tongshuang,FENG Hongkui,et al. Calculation Method of Error-correction Parameters for Ship-borne Radar Based on Star Sensors[J]. Telecommunication Engineering,2014,54(8):1077-1081.(in Chinese)
[8]刘冰,朱伟康,张同双,等. 基于双星敏感器的船体姿态确定[J]. 光学精密工程,2014,22(3):570-575.
LIU Bing,ZHU Weikang,ZHANG Tongshuang,et al. Ship Attitude determination based on dual star sensors[J]. Optics and Precision Engineering,2014,22(3):570-575.(in Chinese)
[9]张同双,钟德安,潘良,等. 船用星敏感器姿态测量误差模型研究[J]. 电讯技术,2014,54(2):218-223.
ZHANG Tongshuang,ZHONG Dean,PAN Liang,et al. Research on Attitude Error Model of Ship-borne Star Sensor[J]. Telecommunication Engineering,2014,54(2):218-223.(in Chinese)
[10]刘利生,吴斌,吴正容,等.外弹道测量数据处理[M].北京:国防工业出版社,2002.
LIU Lisheng,WU Bin,WU Zhengrong,et al. Post-flight data processing of trajectorymeasurement[M]. Beijing: National Defense Industry Press,2002.(in Chinese)

张同双(1968—),男,江苏泗阳人,1993年于重庆大学获学士学位,2006年于中国科学技术大学获硕士学位,现为高级工程师,主要研究方向为船姿船位测量技术;
ZHANG Tongshuang was born in Siyang,Jiangsu Province,in 1968. He received the B.S degree from Chongqing University and the M.S. degree from University of Science Technology of China in 1993 and 2006,respectively. He is now a senior engineer. His research concerns attitude and position determination technique for TT&C ship′s measuring equipment.
Email:zts_123@163.com
钟德安(1964—),男,江苏江阴人,1990年于东南大学获硕士学位,现为研究员,主要研究方向为测量船标校技术;
ZHONG Dean was born in Jiangyin,Jiangsu Province,in 1964. He received the M.S. degree from Southeast University in 1990. He is now a senior engineer of professor. His research concerns calibration techniques for TT&C ship’s measuring equipment.
Email:zda1014@126.com
潘良(1967—),男,浙江苍南人,1988年于浙江大学获学士学位,现为高级工程师,主要研究方向为船姿船位测量技术;
PAN Liang was born in Cangnan,Zhejiang Province,in 1967. He received the B.S. degree from Zhejiang University in 1988. He is now a senior engineer. His research concerns attitude and position determination technique for TT&C ship′s measuring equipment.
Email:qianyan99@126.com
焦宏伟(1982—),男,吉林梨树人, 2012年于国防科技大学获博士学位,主要研究方向为船姿船位测量技术;
JIAO Hongwei was born in Lishu,Jilin Province,in 1982. He received the Ph.D. degree from National University of Defense Technology in 2012. His research concerns attitude and position determination technique for TT&C ship′s measuring equipment.
Email:jhw23@aliyun.com
王二建(1982—),男,江苏淮安人,2006年于装甲兵工程学院获硕士学位,现为工程师,主要从事航天测控技术研究。
WANG Erjian was born in Huai′an,Jiangsu Province,in 1982. He received the M.S. degree from Armored Force Engineering Institute in 2006. He is now an engineer. His research concerns spacecraft tracking and control technology.
Email:hk_zgy@126.comdoi:10.3969/j.issn.1001-893x.2015.05.010
引用格式:张同双,钟德安,潘良,等.基于星敏感器指向的船载雷达轴系误差分离模型[J].电讯技术,2015,55(5):516-521.[ZHANG Tongshuang,ZHONG Dean,Pan Liang,et al.Error Separation Model for Shaft Parameters of Ship-borne Radar Based on Pointing of Star Sensor[J].Telecommunication Engineering,2015,55(5):516-521.]
Error Separation Model for Shaft Parameters of
Ship-borne Radar Based on Pointing of Star Sensor
ZHANG Tongshuang1,2,ZHONG Dean1,PAN Liang1,2,JIAO Hongwei1,2,WANG Erjian1
(1.China Satellite Maritime Tracking and Control Department,Jiangyin 214431,China;
2.Joint Laboratory of Ocean-based Flight Vehicle Measurement and Control,Jiangyin 214431,China)
Abstract:In view of the deficiency of existing dynamic calibration methods for ship-borne radar,a shaft parameter calibration method for ship-borne radar based on star sensor is proposed. This method calculates the shaft parameters of ship-borne radar by taking the precise horizontal orientation of star sensor as comparison basis. A dynamic calibration scheme of ship-borne radar based on star sensor is designed,the influence of ship swing measurement error on radar angle measurement precision is analyzed and the angle measurement error correction model of radar antenna pedestal deformation is derived. According to the different measuring targets,the error separation models for shaft parameters of ship-borne radar in joint measuring star and tracking target are founded respectively. By the experiment of joint measuring star,the error separation model for shaft parameters is verified. Experimental results show that,by using the dynamic calibration results,the rectified system residuals of ship-borne radar azimuth angle and pitch angle are 3″ and 9″,the random errors are 40″ and 45″,respectively. The results meet the technical requirements and the model is valuable in practice engineering applications.
Key words:ship-borne radar;star sensor;shaft parameter;dynamic calibration;error separation
作者简介:
中图分类号:TN953;V556.5
文献标志码:A
文章编号:1001-893X(2015)05-0516-06
通讯作者:**zts123@163.comCorresponding author:zts123@163.com
收稿日期:*2015-01-30;修回日期:2015-04-07Received date:2015-01-30;Revised date:2015-04-07
doi:10.3969/j.issn.1001-893x.2015.05.009