神经网络辨识的液压挖掘机LPV模型
2016-01-22 09:07邵辉胡艳丽洪雪梅王飞
华侨大学学报(自然科学版) 2016年1期
关键词:神经网络
邵辉, 胡艳丽, 洪雪梅, 王飞
(华侨大学 信息科学与工程学院, 福建 厦门 361021)
神经网络辨识的液压挖掘机LPV模型
邵辉, 胡艳丽, 洪雪梅, 王飞
(华侨大学 信息科学与工程学院, 福建 厦门 361021)
摘要:针对液压挖掘机动臂关节的非线性建模问题,提出一种基于神经网络的线性变参数(LPV)模型的辨识方法.在各个工作点处根据其关节速度的一阶惯性加延迟模型,获得其关节角度模型;结合调度变量特性,采用神经网络辨识出LPV模型的参数,设计出挖掘机动臂在全局工作范围的LPV模型.通过仿真实验,验证了该方法的有效性和模型的准确性.
关键词:液压挖掘机; 动臂关节; 神经网络; 线性变参数; 辨识
液压挖掘机是结构最复杂、用途最广泛的工程机械之一.目前,大部分液压挖掘机属手动控制,它操作速度慢,效率低,无法应对相对危险的环境[1].因此,实现挖掘机的自动控制是提高效率和安全性的必要途径.对复杂的非线性系统,线性建模方法[2]在非线性因数变化很大时并不适用,而现有的非线性建模方法如机理模型[3]、Volterra级数[4]、非线性ARMAX[5]、Wiener模型[6]等也存在着很多缺陷.最大的问题是非线性过程的复杂性和辨识的高成本.因此,需要寻找一种更好的、低成本的非线性建模方法.神经网络的线性变参数(linear parameter varying,LPV)是Shamma等[7]在研究增益调度控制时首先引入的.对于大部分具有非线性特性的工业过程,其系统并不是在整个操作域内随机无序的进行,而是存在一个与系统动态特性相关的调度变量.而LPV系统的动态特性依赖实时可测的外部参数,其调度参数反映了系统的非线性特性或时变特性,根据调度变量建立系统的LPV模型可以满足系统后继的控制要求.由一个非线性系统得到其LPV模型有2种方法:基于系统动态方程的分析法[8]和基于系统输入输出的实验法[9],实验法常用于辨识LPV的黑箱模型[10].为了辨识系统模型,需要进一步将其参数化,文献[11-13]对此进行了大量的研究,多是将过程模型参数用调度变量的非线性函数表示,采用递归最小二乘法估计模型参数,得到LPV模型.由于调度变量高度的相互依存性,相互之间的函数关系并不明确,且考虑到神经网络可以快速有效地辨识多输入多输出的高度非线性系统.因此,本文采用实验法,提出了基于神经网络的LPV模型的非线性辨识方法.
1系统的基本结构
液压挖掘机控制系统是指对发动机、液压泵、多路换向阀和执行元件(液压缸、液压马达)等动力系统进行控制的系统[2],如图1所示.
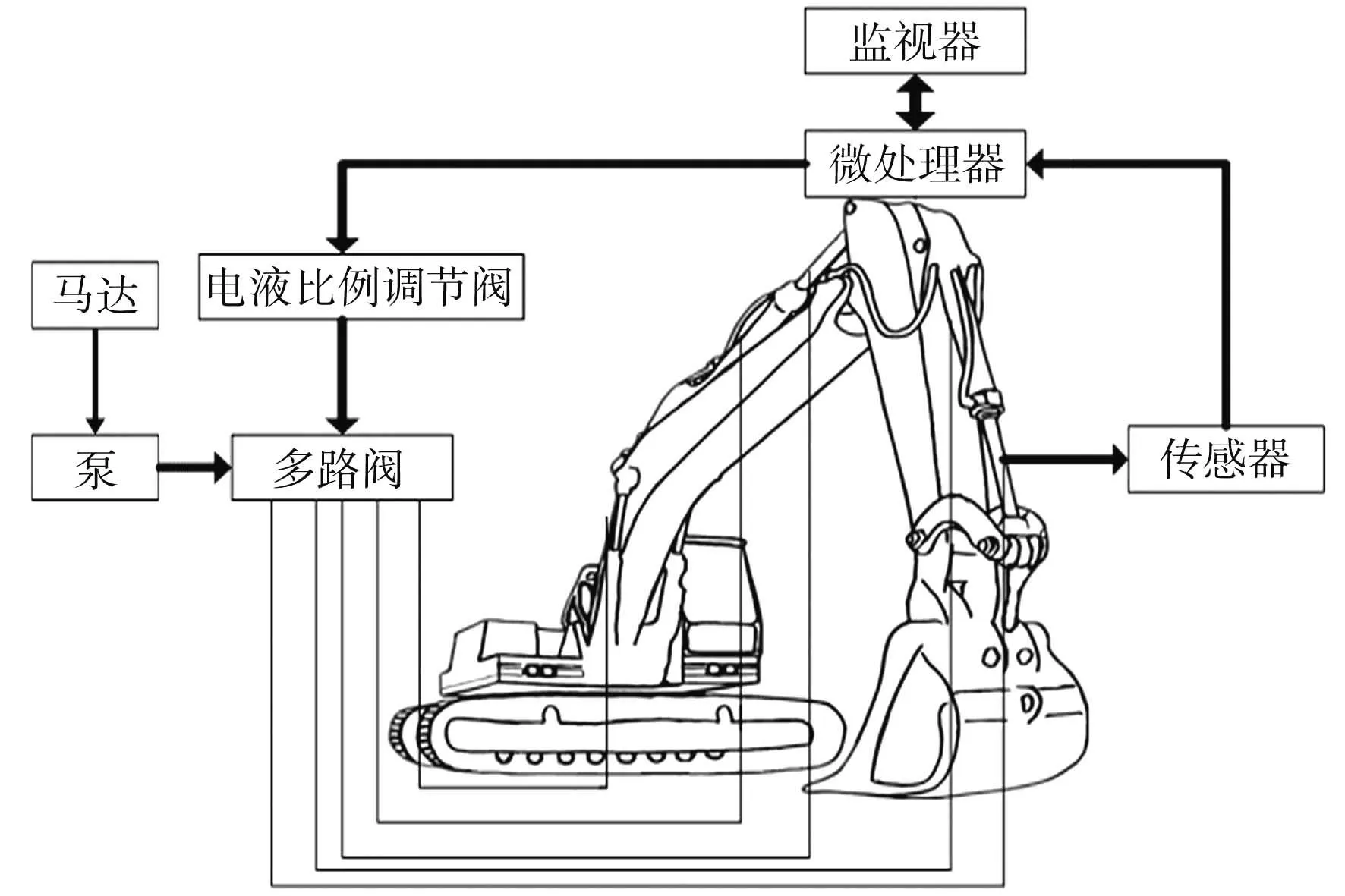
图1 液压挖掘机控制系统Fig.1 Control system of the hydraulic excavator
若要对挖掘机进行准确的控制,则必须建立其准确的模型.选取挖掘机的动臂关节,对其进行合理的建模.在单一工作点时,根据工程简化,其阀门开度与动臂关节速度之间是一阶惯性加延迟系统,则阀门开度与关节角度之间的传递函数可以表示为

式(1)中包括3个参数依赖系统:系统的稳态增益K;二阶系统的时间常数T;延迟量τ.
整个系统是典型的非线性时变系统,K,T,τ分别是关于系统调度变量的函数,均受阀门开度、动臂位置及其运动方向的影响.系统通过阀门开度将泵排出的液压油提供到各元件,使挖掘机完成各项工作,而挖掘机动臂的运动方向及其位置的及时反馈也会驱使挖掘机分流阀动作,使挖掘机在理想的工作面上工作.选择阀门开度、动臂运动方向及其角度作为系统的调度变量.则系统可表示为

2神经网络LPV模型辨识
2.1 前馈神经网络计算

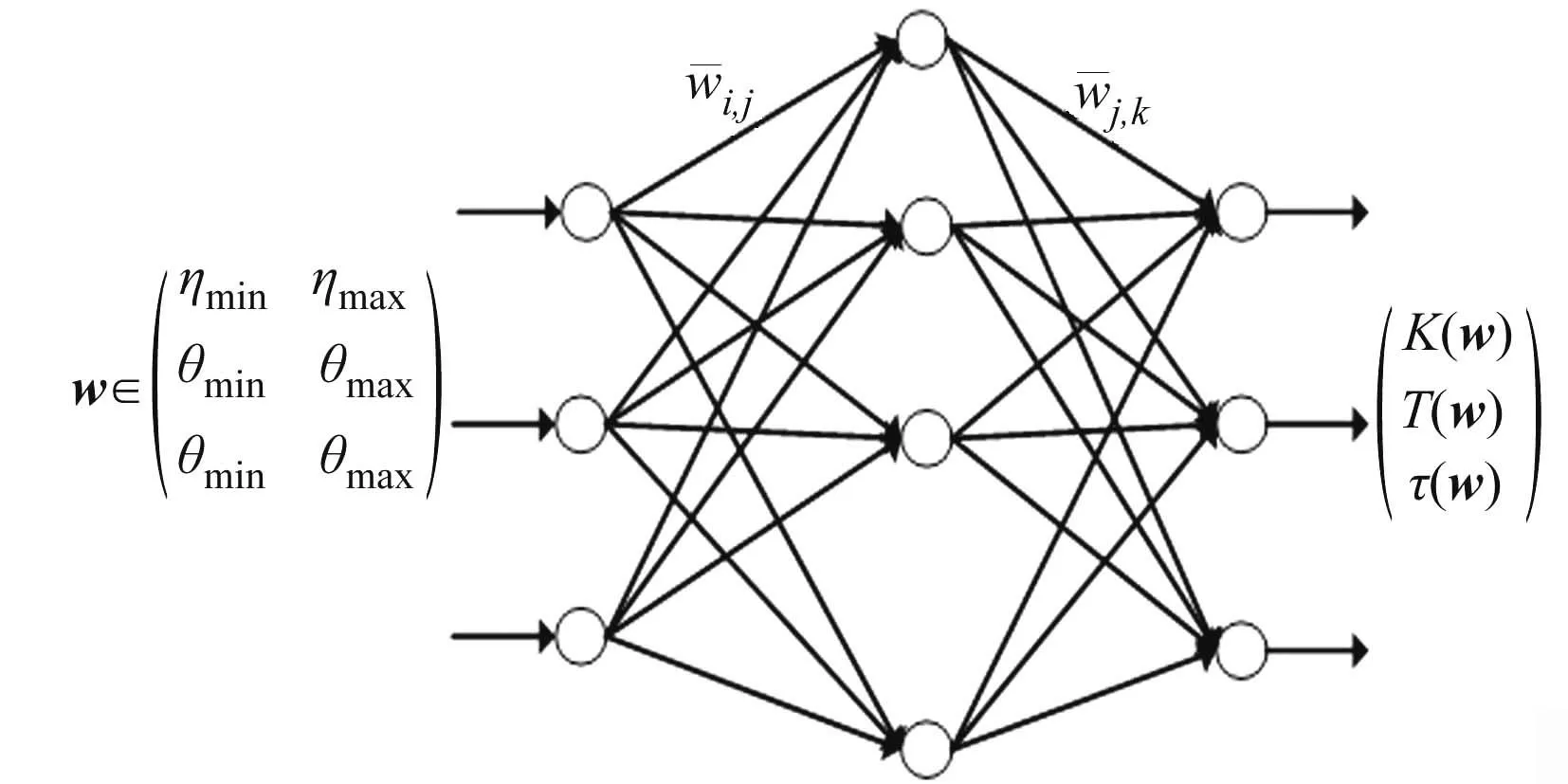
图2 神经网络结构模型Fig.2 Neural network structure model
若Ui是输入层节点i的输出,Uk是输出层节点k的输出,Uj是隐含层节点j的输出,则隐含层的第j个节点的输入表示为

第j个节点的输出为



式(5)中:q为隐含层节点数.则输出层第k个节点的实际网络输出为

2.2 神经网络训练步骤
使用神经网络预测,首先要训练网络,通过训练使网络具有联想记忆和预测能力,有以下6个步骤.
步骤1网络初始化.
步骤3计算实际输出.
步骤4根据网络预测输出与期望输出,计算网络预测误差.
步骤5更新权值.
步骤6判断算法是否结束,若没有,则返回步骤2.
通过对实验数据的多次训练,神经网络达到了理想的效果.
3仿真及实验

3.1 采集数据
根据挖掘机提取的数据(部分),如表1所示.表1中:n为实验次数;τ,K,T为近似数值.
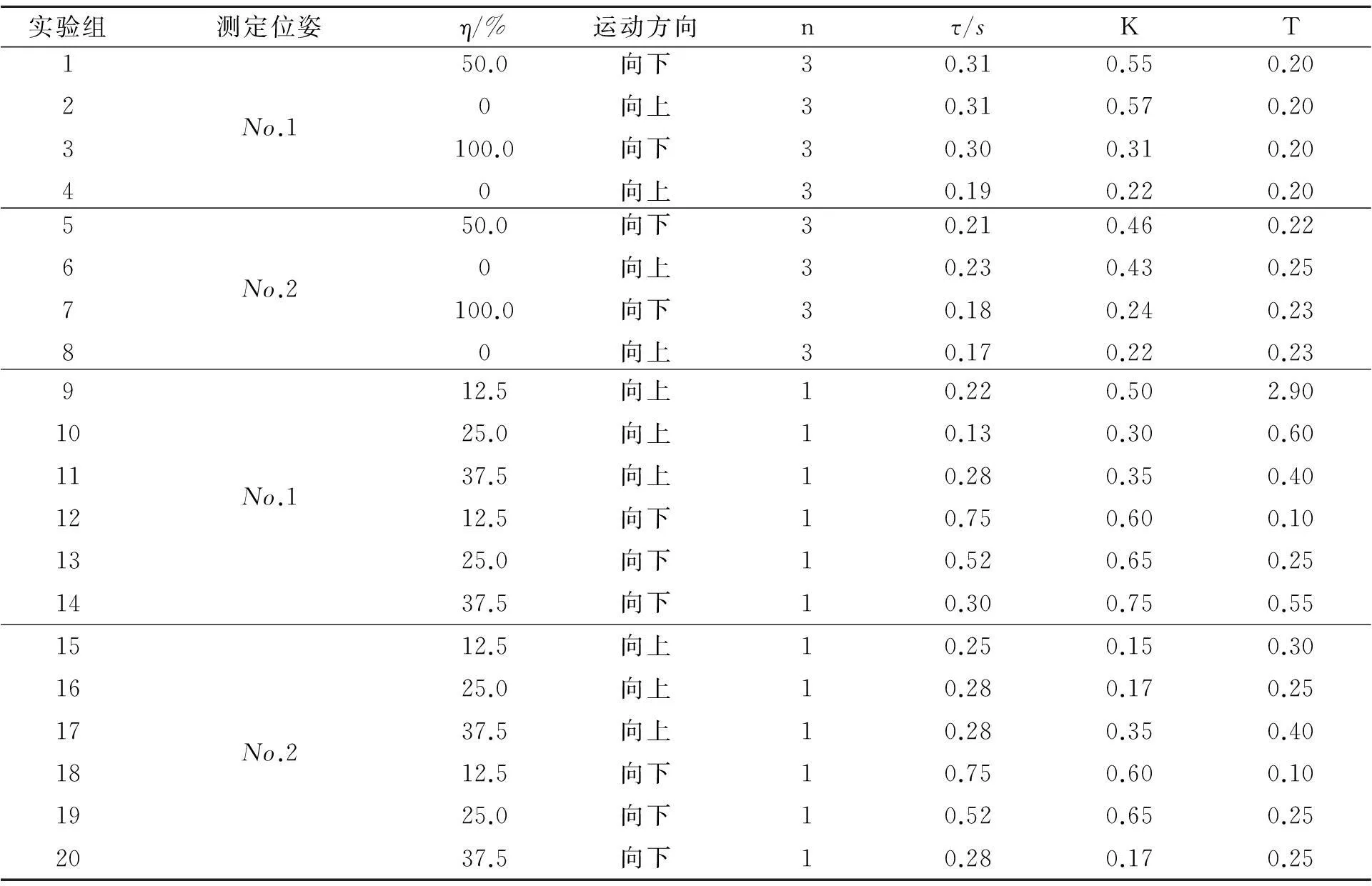
表1 挖掘机特性实验数据
表1中:测定位姿为挖掘机动臂关节所在位姿的角度,其中,位姿No.1是动臂关节运动到最高极限70.5°角,位姿No.2是运动到水平 10.5°角.选择典型工作点采集数据并建立神经网络,经过多次训练,结果如图3所示.从图3可以看出:神经网络具有较高的拟合能力.

图3 神经网络预测输出Fig.3 Output of neural network
3.2 仿真及实验
在已完成神经网络的基础上,于Matlab/Simulink中建立挖掘机的仿真模型.对挖掘机动臂在开度为100%,从位姿No.1运动到位姿No.2,以及开度为43.75%和31.25%时,从位姿No.2运动到位姿No.1时的运动情况进行阶跃、正弦响应实验仿真,结果如图4所示.
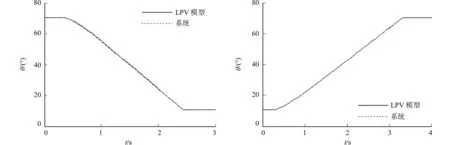
(a) w=[100%,-70.5°,1] (b) w=[43.75%,-10.5°,-1]
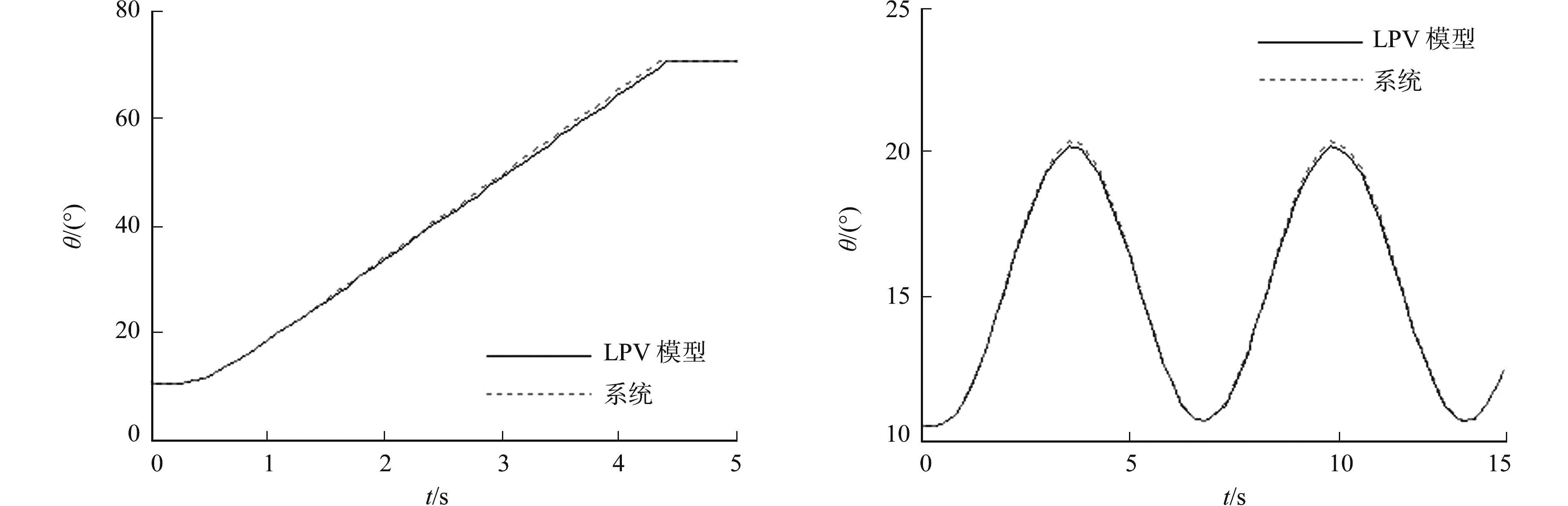
(c) w=[31.25%,-10.5°,-1] (d) w=[31.25%,-10.5°,-1] 图4 阶跃和正弦响应曲线Fig.4 Step and sinusoidal response curve
由图4比较分析可知:该LPV模型能够很好地逼近真实过程;因为调度变量的全局性,该LPV模型可以模拟系统在整个工作范围内的活动,节省了工作量.
4结论
为了简化模型并降低成本,提出一种基于神经网络的LPV辨识方法.该方法建立在具有简单结构的数学模型上,结合系统的非线性时变特性,通过神经网络建立调度变量与辨识参数之间的联系.通过仿真实验,得到以下2点结论.
1) 引入神经网络,辨识出动态模型参数,能够简单快速地构建系统模型,并在全局范围内有效.
2) 基于神经网络的LPV模型结构简单,保证了后继的控制器设计简单可行.
参考文献:
[1]LIBo,YANJun,GUOGang,etal.Highperformancecontrolofhydraulicexcavatorbasedonfuzzy-PIsoft-switchcontroller[C]∥IEEEInternationalConferenceonComputerScienceandAutomationEngineering.Shanghai:IEEEPress,2011:676-679.
[2]LUGuangming,SUNLining,XUYuan.BPnetworkcontroloverthetrackofworkingdeviceofhydraulicexcavator[J].ChineseJournalofMechanicalEngineering,2005,41(5):199-122.
[3]XIANGQiangzhong,LIDongliang.Mechanical-hydrauliccouplingsimulationforhydraulicexcavatorworkingmechanism[C]∥2ndInternationalConferenceonAdvancedEngineeringMaterialsandTechnology.Zhuhai:AdvancedMaterialsResearch,2012:494-497.
[4]BOUILLOCT,FAVIERG.NonlinearchannelmodelingandidentificationusingbasebandVolterraParafacmodels[J].SignalProcessing,2012,92(6):1492-1498.
[5]SHARDTY,HUANGBiao.Closed-loopidentificationconditionforARMAXmodelsusingroutineoperatingdata[J].Automatica,2011,47(7):1534-1537.
[6]BIAGIOLASI,FIGUEROAJL.IdentificationofuncertainMIMOWienerandHammersteinmodels[J].ComputersandChemicalEngineering,2011,35(12):2867-2875.
[7]SHAMMAJ,ATHANSM.Guaranteedpropertiesofgainscheduledcontrolforlinearparameter-varyingplants[J].Automatica,1991,27(3):559-564.
[8]YUETing,WANGLixin,AIJunqiang.Gainself-scheduledH1controlformorphingaircraftinthewingtransitionprocessbasedonanLPVmodel[J].ChineseJournalofAeronautics,2013,26(4):909-917.
[9]CASELLAF,LOVERAM.LPV/LFTmodelingandidentification:Overviewsynergiesandacasestudy[C]∥IEEEConferenceonComputerAidedControlSystemDesign.SanAntonio:IEEEPress,2008:852-857.
[10]SALAHCP,EL-DINE,MAHDIS,etal.Black-boxversusgrey-boxLPVidentificationtocontrolamechanicalsystem[C]∥IEEE51stAnnualConferenceonDecisionandControl.Maui:IEEEPress,2012:5152-5157.
[11]KNOBLACHA,SAUPEF.LPVgrayboxidentificationofindustrialrobotsforcontrol[C]∥IEEEInternationalConferenceonControlApplications.Dubrovnik:IEEEPress,2012:831-836.
[12]BAMIEHB,GIARREL.Identificationforlinearparametervaryingmodels[J].InternationalJournalofRobustandNonlinearControl,2002,12(9):841-853.
[13]邵辉,野波健藏.Peltier热电设备的LPV建模及多参考模型IPD自适应控制研究[J].南京理工大学学报,2011,35(增刊1):85-90.
[14]邵辉,胡伟石,罗继亮.自动挖掘机的动作规划[J].控制工程,2012,19(4):594-597.
(责任编辑: 黄晓楠 英文审校: 吴逢铁)

LPVModelofHydraulicExcavatorBasedon
NeuralNetworkIdentification
SHAOHui,HUYanli,HONGXuemei,WANGFei
(CollegeofInformationScienceandEngineering,HuaqiaoUniversity,Xiamen361021,China)
Abstract:A linear parameter varying model is proposed based on neural network identification for building the hydraulic excavator boom model. The model of the joint angle is obtained based on the first-order plus dead time model of the joint velocity at each working-point. Depending on scheduling variable characteristics, the LPV model parameters are identified by using neural network, and the global LPV model of the excavator boom in the workspace is designed. The simulations and experiments indicate the accuracy of the model and the validity of the method.
Keywords:hydraulic excavator; boom joint; neural network; variable linear parameter; identification
基金项目:国家自然科学青年基金计划资助项目(61203040); 福建省科技计划引导性项目(Z1525022); 福建省泉州市科技计划项目(2013Z34)
通信作者:邵辉(1973-),女,副教授,博士,主要从事机器人控制、运动规划、过程控制及智能控制的研究.E-mail:shaohuihu11@163.com.
收稿日期:2014-09-25
中图分类号:TP 273
文献标志码:A
doi:10.11830/ISSN.1000-5013.2016.01.0043
文章编号:1000-5013(2016)01-0043-05
猜你喜欢
现代电力(2022年2期)2022-05-23
装备制造技术(2020年11期)2021-01-26
电子制作(2019年19期)2019-11-23
中国生物医学工程学报(2019年5期)2019-07-16
电子制作(2019年24期)2019-02-23
通信电源技术(2018年3期)2018-06-26
北京航空航天大学学报(2017年12期)2017-04-23
重型机械(2016年1期)2016-03-01
现代计算机(2016年17期)2016-02-28
舰船科学技术(2015年8期)2015-02-27