多方位智能跟踪花洒淋浴系统的设计
2016-01-22 09:07:40陈水宣丁宏李文望姜勇剑
华侨大学学报(自然科学版) 2016年1期
关键词:花洒
陈水宣, 丁宏, 李文望, 姜勇剑
(厦门理工学院 机械与汽车工程学院, 福建 厦门 361024)
多方位智能跟踪花洒淋浴系统的设计
陈水宣, 丁宏, 李文望, 姜勇剑
(厦门理工学院 机械与汽车工程学院, 福建 厦门 361024)
摘要:针对传统固定式花洒淋浴操作不灵活、淋浴不方便的问题,设计一套可在墙面任意位置移动、固定,能翻转角度的多方位智能手势跟踪淋浴系统.该系统采用低电压直流电动机、同步带、同步带轮、导轨及滑块等实现平面内的移动,通过花洒座上的光电传感器及内部PLC系统的协调控制2个电机,同步带轮带动同步带,实现两轴联动;通过控制微型减速电机控制花洒的上下摆动,通过设置磁铁组合,同步移动墙体内部移动座和外部花洒座.研究表明:该系统实现三自由度花洒控制,可满足轻松、便捷、灵活的现代淋浴需要.
关键词:淋浴系统; 花洒; 智能跟踪; 三自由度; 可编程逻辑控制
随着人们的生活水平不断提高,智能化的产品逐渐取代以往的老式产品,如恒温水龙头、智能温控热水器等[1-6].卫浴产品是人们生活中不可或缺的一部分,因其应用广泛,便利、舒适,一直是人们关注的话题.在卫浴产品中,花洒淋浴可以说是最简单便捷的方式.通过对传统的花洒设计的调查发现,现有花洒一般为固定式,即通过花洒座固定在前面的某一位置或者直接固定在天花板,虽然淋浴时可以将花洒取下,但使用时需用手持,相同用水量下,置顶式的淋浴范围更为局限.针对传统固定式花洒淋浴存在的操作死板、淋浴不便的问题,文中设计一种可在墙面上任意位置移动和停留的新型多方位智能淋浴系统.
1花洒淋浴系统方案设计
为了在淋浴过程中彻底解放双手,需要设计的花洒及执行机构能够在墙面上任意位置移动和停留,从而实现多方位智能淋浴.花洒淋浴系统的总体方案模型,如图1所示.执行系统机构利用平面内两垂直方向上的低电压电动机、同步带、同步带轮,以及导轨、滑块实现平面内的移动,并通过花洒座上的光电传感器及内部PLC系统的协调控制,实现同步带的两轴联动,通过设置磁铁组合,实现墙体内部移动座和外部花洒座的同步移动[7].
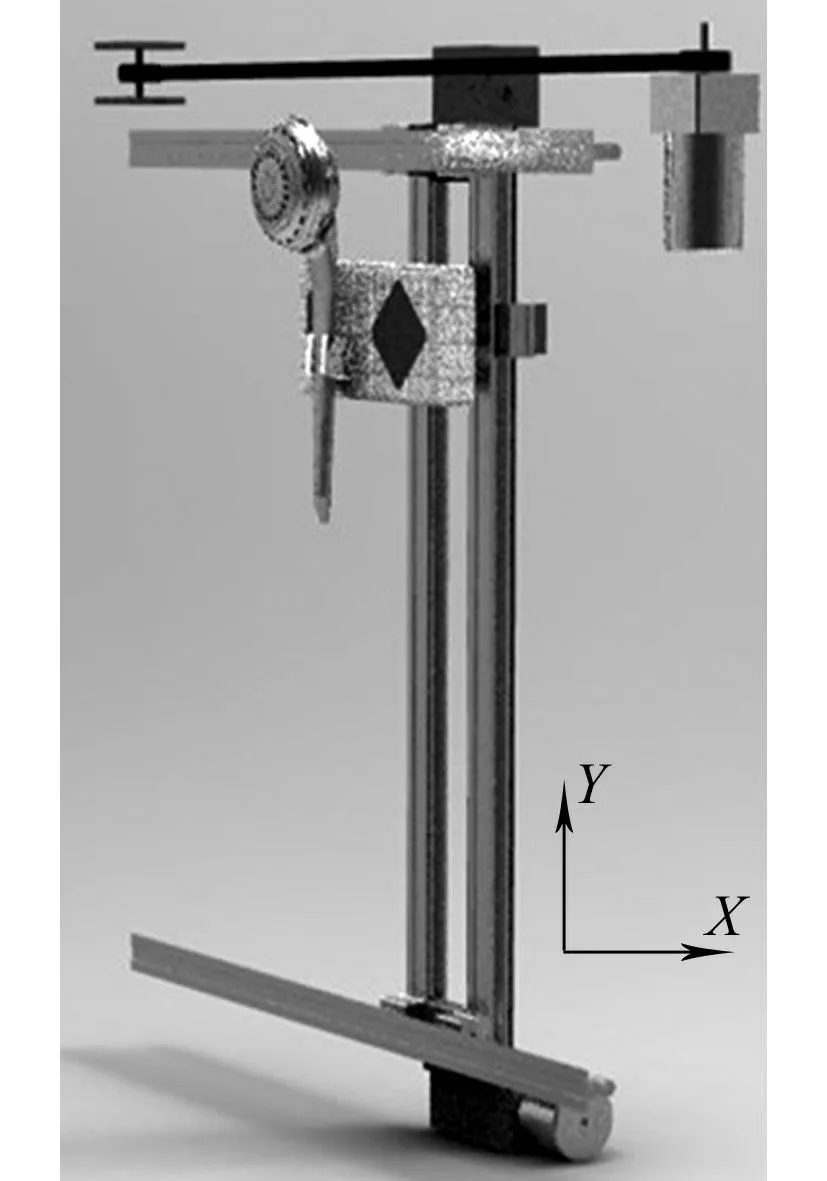
图1 整体方案模型Fig.1 Model of overall scheme
此外,花洒设计的角度为0°~90°可调;为适应不同身高的用户使用,X,Y轴平面可移动行程均为1 000 mm.智能花洒系统整机功率小于200 W,厚度小于100 mm,总质量小于50 kg,方便用户装配或者在原有家居基础上进行改造.
该方案主要有如下4点技术创新点:1) 采用电机带动同步带实现X,Y两轴位置联动,运动稳定、成本低廉;2) 采用磁铁实现运动花洒与X,Y联动平台的无接触控制,无需破坏墙面;3) 采用非接触传感器进行花洒的三自由度控制,操作方便、便捷;4) 运行控制器编程灵活,方便根据用户不同的具体要求进行改进.
2各部分机构设计
2.1 两轴联动的稳定控制
花洒背面的轨道控制,如图2所示.由图2可知:通过两垂直方向上安装的电机带动同步带,实现水平竖直方向上的移动,即电机1、同步带1控制竖直方向移动,电机2、同步带2控制水平方向移动.为提高机构的稳定性,采用了双滑块的固定方式.

图2 花洒背面的轨道控制Fig.2 Orbit control of the shower back
2.2 花洒座的控制移动
花洒座的控制设计,如图3所示.图3中:1为花洒;2为花洒座;3为上下摆光电传感器;4为左右移动光电传感器;5为上下移动光电传感器.在花洒座盒中设置4个光电传感器,分别对应4个方向的移动信号,实现4个方向上的信号拾取.
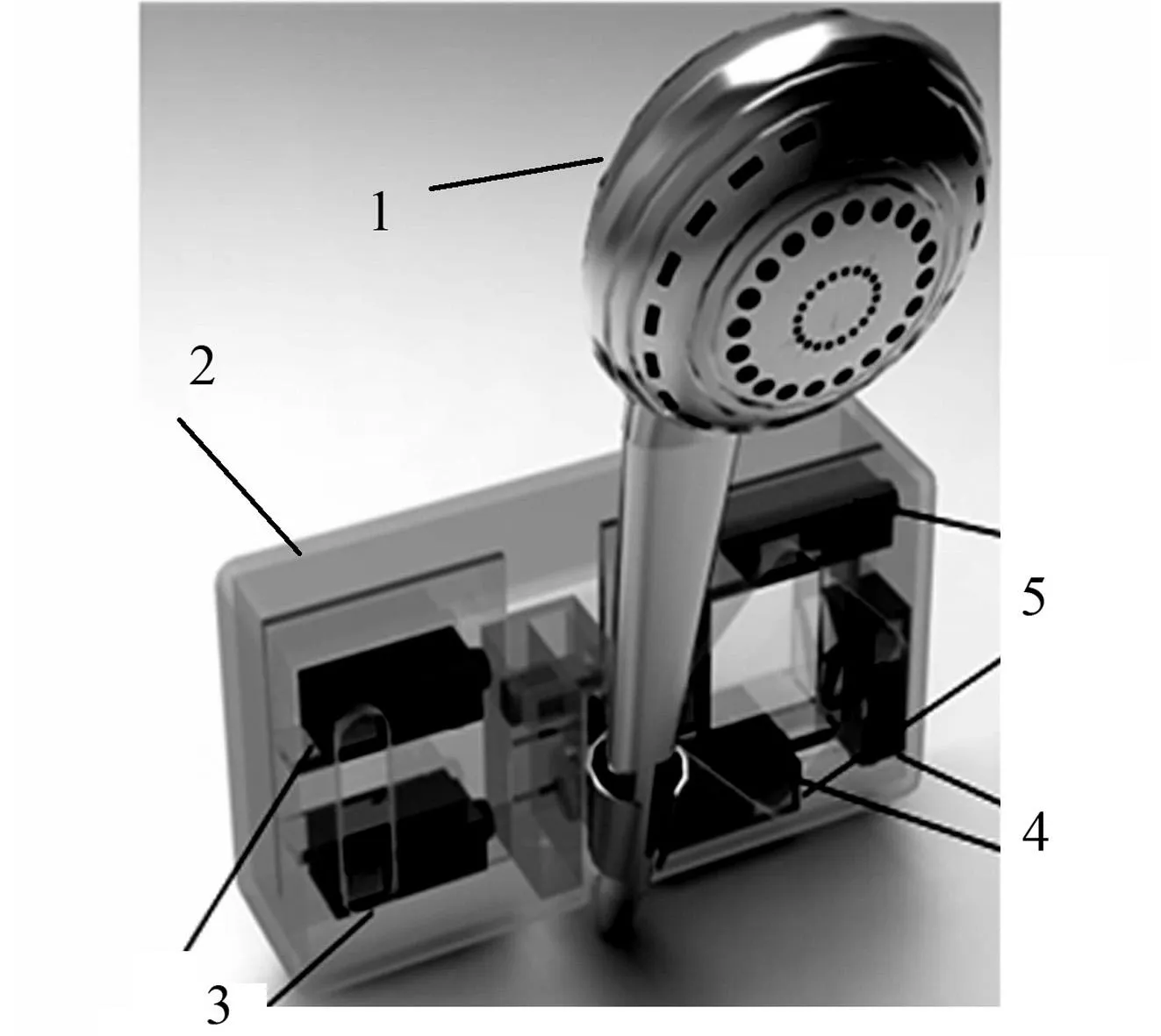
图3 花洒盒控制设计Fig.3 Design of sprinkler box control
花洒盒右部为移动传感器组.其工作原理是,当某一方向上的光电传感器受到遮挡,传感器将信号传给PLC系统.此时,通过PLC系统的信号处理,触发相应方向的电机运动,直至手部离开监测范围,信号断开,电机停转,实现花洒座位置的移动.此外,在4个方向上都安装有微动开关,作为行程极限位置限位,防止过行程动作,提高机构稳定性.
花洒盒左部为摆动传感器组.其工作原理是,当遮挡上部时,传感器拾取信号,花洒座内部电机启动,通过减速箱带动花洒座轴转动,使花洒出水端角度抬升;而当遮挡下部时花洒出水端角度降低,实现花洒淋浴角度的改变.同时,在上下两个摆角极限位置也装有微动开关,起到限位作用.
2.3 墙体内部滑块和墙体外部花洒座的同步移动
为防止机构受到淋浴水的腐蚀及室内装修的美观,将电机、同步带、移动座和花洒座隔开.此时,隔开后两部分的同步运动成了设计难题.在比较几种已知方案后,选取利用磁铁吸合的方法解决该难题.通过内外一一对应的磁铁组,完成墙体内部移动座和墙体外部花洒座的同步移动.
2.4 花洒可调式摆角的设定
设定花洒转动速度n=5 r·min-1,考虑花洒带水工作及摆角变化引起的重心变化,花洒轴转动所需转矩T=1 N·m.控制电机要求:体积小,扭矩大,工作电压3~24 V,经济性好.经查阅,初步选用ALONG 12AN20型微型减速电机.由于电源均采用12,24 V控制,因此选用12 V系列的减速电机,其转速远大于花洒实际所需转速,所以必须设计减速机构.
考虑加工成本及加工难度,最终采用直齿轮二级减速,购买塑料小齿轮,模数为0.5,一级减速传动比n1为3,二级减速传动比n2为6,所需电机转速n电=n·n1·n2=5×3×6=90 r·min-1.经查产品系列参数,采用最接近值,即选用额定电压为12 V, 转速为87 r·min-1的减速电机.减速电机的输出转矩为2 N·m,已满足工作转矩要求,加上减速机构后,最终输出转矩远大于工作所需转矩[8].考虑该电机价格便宜,易于采购,参数优于其他电机,且过大转矩对机构影响不大,且能提高转动稳定性,最终输出转矩太大的缺点可以忽略.
2.5 墙体内外的始终吸合
为保证墙面不够光滑平整时花洒移动的平顺性,墙体内部移动座和外部花洒座通过磁铁始终吸合使其不掉落,其结构如图2中圆圈所示.设置调整机构提高墙体内部移动座的自由度,当墙面平整度不同时,通过调节墙体内部移动座上合页的转动角度,保证墙体内部的移动座跟外面的花洒座始终吸合.
3PLC控制器的设计
考虑到PLC的稳定性,产品开发周期短,编程简单方便等优点,所以选用PLC作为本设计的运行控制器[9].PLC各I/O口的配置说明,如表1所示.利用PLC输入端口接收光电传感器传输的信号,然后以扫描的工作方式把接收到的信号传输到PLC内部程序运行,通过事先设计好的程序控制输出端口,从而实现通过传感器的信号控制外部的执行机构工作.

表1 I/O口输入和输出点的配置说明
程序中共用到6个光电传感器,分别控制花洒盒的上、下、左、右,以及花洒座的上、下运动[10].为了实现两轴联动功能,6个传感器采用并联的编程方法,从而达到可以自由控制花洒盒的移动,实现自由淋浴的目的.为了保护执行机构的运行的稳定性和安全性,程序中每两个相反方向(如上,下)的回路中采用互锁控制和限位开关,以达到保护机构的安全和智能控制的目的.
此外,为了使整个机构运行系统更直观和智能化,程序中编有极限位置的指示灯和报警器.当机构运动到极限位置时,指示灯和报警灯会及时响应报警.根据本系统的控制需要,采用三菱板式系列PLC,经济实用[11-14].PLC控制器的硬件接线图和电气接线图,分别如图4,5所示.

图4 硬件接线图 图5 电气接线图Fig.4 Hardware connection diagram Fig.5 Diagram of electrical wiring
4结束语
针对传统固定式花洒淋浴存在的操作死板、淋浴不便的问题,设计一种可在墙面上任意位置移动和停留新型的多方位智能淋浴系统.该淋浴系统可在墙面任意位置移动、固定并且翻转角度,使得淋浴系统自动调节,提高了沐浴的效率,很大程度上减少了水资源的浪费.与此同时,该淋浴系统的运行机构隐藏在墙面背后,整体安装效果美观.此外,PLC控制沐浴系统实现自动化和智能化保证了花洒的可靠和稳定,将智能化技术落实到日常生活中,为人们生活带来便利.
参考文献:
[1]李东.机械工程智能化的现状及发展方向探讨[J].硅谷,2013,6(10):3,2.
[2]李峰.关于建筑智能化与节能设计的探讨[J].城市建设理论研究(电子版),2013(12):301-303.
[3]SANDBERG M,TYAPIN I,KOKKOLARAS M,et al.A knowledge-based master-model approach with application to rotating machinery design[J].Concurrent Engineering,2011,19(4):295-305.
[4]朱海明.基于PLC的水雾智能灭火系统研究[J].科技情报开发与经济,2006,16(20):149-150.
[5]YI Hongming.CTDS power control system based on LabVIEW8.2 and PLC[J].Programmable Controller and Factory Automation,2013,2(7):65-70.
[6]倪会娟,罗继亮.采用普通Petri网的自动化立体仓库系统的PLC程序设计[J].华侨大学学报(自然科学版),2014,35(2):146-150.
[7]濮良贵,季明刚.机械设计[M].7版.北京:高等教育出版社,2001:4-5.
[8]赵争鸣,袁立强,孟朔,等.通用变频器矢量控制与直接转矩控制特性比较[J].电工技术学报,2004,19(4):81-84,44.
[9]李树彬.浅谈PLC控制技术在工业自动化中的应用[J].现代制造,2011(30):122-123.
[10]乔勇惠.光电传感器原理及应用[J].可编程控制器与工厂自动化,2008(5):103-106.
[11]陈延奎.浅谈PLC控制系统的设计方法[J].中国科技信息,2009(20):116-118.
[12]张久.新技术在智能建筑中的应用[J].中国新技术新产品,2010(2):159.
[13]林耀忠.PLC在工业自动化控制领域中的应用及发展探讨[J].通讯世界,2013(2):38-39.
[14]孙宏成.机械工程智能化发展研究[J].中国机械,2015(3):67-68.
(责任编辑: 黄晓楠英文审校: 杨建红)

Design of Multi-Azimuth Intelligent Tracking Shower System
CHEN Shuixuan, DING Hong, LI Wenwang, JIANG Yongjian
(School of Mechanical and Automotive Engineering, Xiamen University of Technology, Xiamen 361024, China)
Abstract:Aiming at the problem that the operation of the traditional fixed sprinkler is not flexible, the shower is not convenient, design a set of multi-azimuth intelligent gesture tracking shower system that can move, fixed and flip angle anywhere on the wall. The system adopts low-voltage DC motor, timing belts, timing belt pulleys, rails and sliders and the others to achieve plane mobile. Through coordination of shower seat on the photoelectric sensors and internal programmable logic control (PLC) system to control two motors, synchronous pulley drives synchronous belt to achieve two linked. By controlling the micro gear motor to control the bobbing shower. By setting the magnet assembly, wall inside the movable block and external shower seat are moved synchronously. Research shows, the system realizes the sprinkler control of three degrees of freedom, which can meet the modern shower needs of easy, convenient and flexible.
Keywords:shower system; sprinkler; intelligent tracking; three degrees of freedom; programmable logic control
基金项目:国家自然科学基金资助项目(51205336); 福建省科技计划重点项目(2012H0041, 2013H0050); 福建省厦门市科技计划项目(3502Z20143033)
通信作者:李文望(1966-),男,教授,博士,主要从事机械CAD/CAM、微纳制造技术的研究.E-mail:xmlww@xmut.edu.cn.
收稿日期:2015-11-06
中图分类号:TH 137
文献标志码:A
doi:10.11830/ISSN.1000-5013.2016.01.0017
文章编号:1000-5013(2016)01-0017-04
猜你喜欢
市场监管与质量技术研究(2023年5期)2023-12-04 07:38:33
科教新报(2023年4期)2023-08-09 21:20:33
保健与生活(2023年12期)2023-06-18 07:27:13
家庭医药·快乐养生(2022年1期)2022-01-18 10:39:09
散文诗(青年版)(2021年6期)2021-08-09 06:18:56
科学与信息化(2020年27期)2020-10-09 11:13:30
养生保健指南(2019年6期)2019-12-16 08:09:25
爱你·健康读本(2019年9期)2019-11-22 16:45:45
爱你(2019年33期)2019-11-14 10:04:54
家庭医药·快乐养生(2019年5期)2019-05-26 14:26:38