Global Mapper软件在雷达选址上的应用分析
2016-01-19 18:35:43郭林辉
现代商贸工业 2015年25期
关键词:视距
郭林辉

摘要:随着航班流量的日渐增长以及航路航线越来越密集,雷达监视的需求也越来越大,尤其是在我国东部地区,仅华东地区在“十二五”期间就已建成6部二次雷达,立项达到20部以上。那么,这么多部雷达布点直接关系到这个区域的监视性能,分析雷达选址点的覆盖性能是有必要的,从而验证选址点监视性能可行性。利用global Mapper这一GIS地图软件,加载数字高程模型(DEM),使用视距分析功能实现对选址点的覆盖描述,结合选址要求、航路航线和现有雷达覆盖情况进行分析选址点覆盖性能,论证其可行性。此外,研究结论也可以应用到其他视距分析领域。
关键词:global Mapper;数字高程模型(DEM);视距;雷达覆盖
中图分类号:TB文献标识码:A文章编号:16723198(2015)26027502
0引言
传统模式的雷达选址比较单一,由于缺乏工具,大多采用人工现场勘测,耗时较长,并不能直观反映选址点的地形特征,尤其是周边范围较远的地形特征,有时这些地形对雷达作用范围是有影响的,更不能做到对选址点的覆盖情况进行进一步分析。即使使用了google earth等地图工具,只是粗略选择相对较高的位置,也不能做到对选址点周边的高程地形进行分析,难以一次性、大范围、高效的建立整个选址研究区域的数字高程模型,更谈不上覆盖图制作了和航路航线覆盖情况。
本文利用Global Mapper(以下简称“GM”)软件,可以快速的分析选址点覆盖性能。该软件具备三维地形可视化和海量数据快速处理能力,还可以利用卫星地图研究地形情况,极大方便了雷达前期选址和覆盖分析。此外,GM具有强大的数据处理能力,可以输入输出多种数据格式,若运用到其他软件或结合使用,前景也是非常可观的。
1GM软件介绍及可行性论证
GM是一款地图绘制软件,支持多种格式的数据源(如:SRTM数据),还能在线方式获得卫星数据和其他地形图数据源。GM软件通过处理将这些数据源显示为光栅地图、高程地图、矢量地图等,可以建立在不同的坐标投影模型下(如CAAC航图使用的兰勃特投影方式),很容易实现地图作编辑、转换、分析、发布等功能,同时它还可以对数据集的范围进行裁剪,支持脚本批量处理,并且可以提供距离和面积计算,光栅混合、对比度调节、海拔高度查询、视线计算等。GM软件还提供开发接口,方便使用者二次开发。相比其他理信息系统软件(GIS),GM软件兼容性更好,支持输出不同数据类型格式的文件。对于高程方面的数据分析上,GM软件可以真实的3D方式来查看高程地图或建立3D模型。此款软件上手容易、操作简单,对计算机软硬件要求不高,基本可以满足雷达站选址方面的要求。
在使用GM软件之前,有必要论证其是否可行。第一,要论证其地图数据影影射是否准确,本文加载CAAC航图文件,查看其轮廓重合度来判断影射正确与否。第二,论证其覆盖分析是否可靠,本文采用对比官方专业覆盖图制作软件Wrap结果,分析其覆盖准确性。
1.1地图数据影射论证
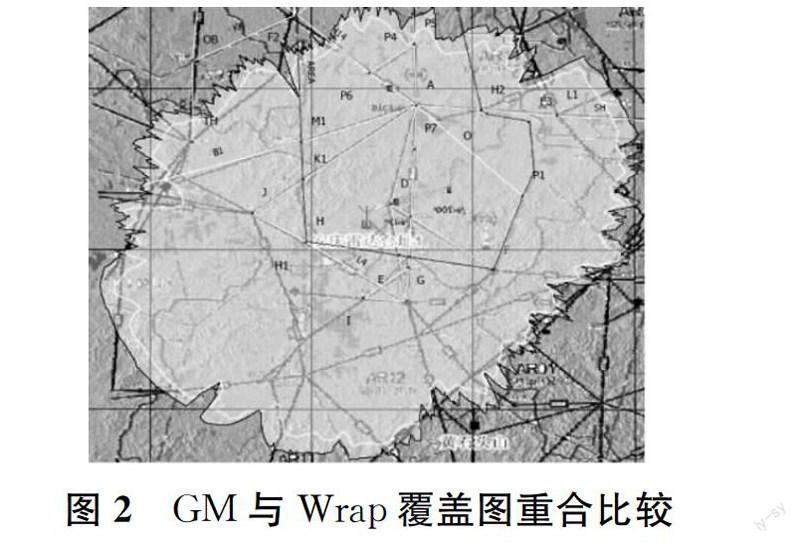
通过将CAAC航图以兰勃特投影方式导入到GM软件当中,同时加载SRTM高程数据,对图形重合度进行比对。如图1所示,从地图轮廓及岛屿形状上看,CAAC航图与SRTM数据基本重合的,就可以得到SRTM高程数据中对于CAAC航图是正确的。
图1航图与地形图轮廓基本重合1.2覆盖分析的论证
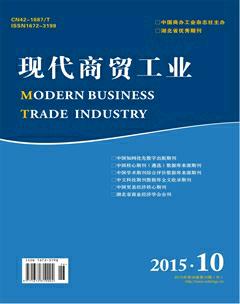
覆盖分析论证是与某官方软件对比,利用GM视距分析功能制作出来的覆盖图形与官方软件Wrap进行比较。如图2所示,对官方制作的覆盖图与GM制作的覆盖图进行重合比对,其中浅色的部分是GM的覆盖图形,而深色的Wrap计算出来的,从图形轮廓上看是几本一致的,而GM制作的覆盖图輪廓更加细致,那么使用GM制作覆盖图是可行的,甚至更优。
图2GM与Wrap覆盖图重合比较通过上述两种校验,基本确定了GM软件在雷达选址应用分析上是可靠的,分析的结果也是有说服力的。
2雷达选址分析
利用GM进行雷达选址应用分析,主要分为5个步骤:前期准备、选址点覆盖制作、覆盖分析、环境分析。最重要的是覆盖分析,这直接关系到雷达是否达到期望的性能。
2.1前期准备
将GM用于雷达选址,首先要获得高程地图,这个可以到srtm官网上进行下载;其次是制作航图,可以将CAAC航图进行影射,也可以自己制作。自己自作的航图可用性好,加载快,这里可以通过在GM软件中导入每个航点,然后依据航图连接航线。当然,还要准备一些其他的地图,如谷歌卫星地图、城市地图等。
选址前期,需要简要分析期望的选址位置地形情况,这里通过使用3D影像和等高线来分析。如图3所示的3D影像,可以直观看到地形情况,波峰波谷位置;图4是GM制作出来的等高线图,这是对地形情况更加具体的描述,从等高线上容易找到制高点、地形变化趋势。对于雷达选址来说,尽量选择地势平坦区域的中心,也就是等高线稀疏的地方,这个区域越大则越有利,至少保证20公里半径;如果找不到广阔的平坦区域,那么可以选择多个区域的制高点,这样遮蔽角就小;最后,需要根据航图避开航线交汇点。
图33D影像显示图4地形上的等高线2.2选址点覆盖制作
使用GM工具栏上的视距分析工具,将其放置到选址点位置,设置分析选项对话框,如图5所示,选项中包含发射机高度、接收机高度、地球曲率、选择图层、作用距离、方位、菲涅尔区、功率图等。一般将发射机高度设置在above ground,接收机高度设置在above sea,根据需要制作不同高度层,可以用不同颜色区分,作用距离设置成雷达最大作用距离475km(256NM),由于地球曲率原因最大视线距离不可能为无穷大,一般10000m的高度,最大视线距离可以达到450km。菲涅尔区的存在会使无线电强度削弱,即使视线上没有遮挡也不意味该点能建立无线电传输路径,一般只考虑第一菲涅尔区,保证在第一菲涅尔区不受遮挡,这样可以认为是自由空间传输。而高程数据采样,在缺省值的基础上扩大10倍以上,这样计算速度会大大提高,图6即为制作好的覆盖图。
图5视距分析选项图6不同高度覆盖图2.3覆盖分析
当有了完整的覆盖图,就可以对覆盖性能进行分析,根据雷达选址要求。需要进行遮蔽分析,区域及航线分析,顶空盲区分析,报告点覆盖分析。
2.3.1遮蔽分析
按照选址要求需要在360°范围内2~5°采样一次遮蔽角大小,进而画出遮蔽图。使用GM提供3D path功能获取该方向上的地形,如图7所示,这样可以很容易计算出最大遮蔽角数值。如果需要考虑周边的建筑物,可以利用谷歌卫星地图,标志出可能影响最大遮蔽角的建筑,图7中两个黑点之间为标注的建筑物位置。通过这样的方法快速的制作出遮蔽图。
图73D path上的地形情况2.3.2区域及航线分析
区域及航线覆盖能力分析是雷达选址中最为重要的一项。在图6中制作完成的覆盖图中,可以清晰的看出不同高度层覆盖率情况、航线覆盖情况、存在遮蔽区域。为了满足区域内多重覆盖的要求,还要画出与其他异地雷达叠加的覆盖图,查看重叠区域是否满足多重覆盖要求。
航线分析主要是分析各条航线的覆盖情况,这个
数据比区域覆盖更有用,即使区域覆盖率很低,只要航线都能覆盖到,那么选址点覆盖性能还是满足要求。
2.3.3顶空盲区分析
一般而言,雷达在仰角45°以上存在顶空盲区,那么10000米高度就有10公里半径的顶空盲区,在覆盖图中将顶空盲区标出,只要分析标出的区域是否存在航线。其实,在选址前期就要求避开了航线交汇点,那么实际的盲区对航线影响将是很小,一般就一两条航线。
2.3.4报告点分析
报告点分析多用于进近和本次区域,与遮蔽分析计算是一样的,这里计算报告点的仰角是否在遮蔽范围内,但遮蔽范围不一定是最大遮蔽角的地方。使用报告点的高度与距离比较得到仰角,利用GM的3D path功能分析出雷达选址点到报告点的地形情况,如图7所示,在此段范围内选择最大遮蔽角,当最大遮蔽角小于仰角即是满足报告点覆盖的。
2.4环境分析
主要是确认周边不存在雷达场地规范要求中的障碍物、反射体、信号源,这些在完成以上分析时现场探测确认,在GM软件上标志出障碍物、反射体、发射源位置,然后依据雷达选址规范确认是否符合要求。同时,将现场周边道路、水源、供电、传输信息一并标志,分析该点建站是否便利、经济。
3结论与展望
通过使用GM软件视距分析功能结合数字高程模型,可以有效的对雷达选址点进行覆盖计算,利用覆盖图直观的分析覆盖性能,同时还可以分析周边的遮蔽情况。另外,还可以对选址点周边环境做一个分析,是否满足雷达的电磁要求。使用GM软件可大大提高选址工作效率,减少现场勘探工作。另一方面,GM软件不仅可以在雷达选址上发挥作用,只要涉及到无线电传输领域,如甚高频通信、ADSB(广播式自动相关监视)、MLAT(多点点位系统)、基站通信等,都可以利用GM提供的视距分析功能计算作用距离与覆盖能力,基于高程数据模型的视距分析也将会成为重点研究方向,特别是移动通信领域。
当然,使用GM软件也存在一些不足之处。第一,SRTM高程数据的精确度不够,一般分辨率在90m;第二,只反映了地形情况,缺少对周边建筑物、丛林描述。随着科学技术发展和大数据时代来临,这些不足也都能被攻破,现在城市3D建筑模型、街景地图都已出现了,相信GM软件在测绘、地图制作、地形分析、3D应用等领域都将会有更广闊的前景。
参考文献
[1]林松,程维明,乔玉良.基于Global Mapper的地貌晕渲制图——以西安幅(Ⅰ49)为例[J].地球信息科学学报,2009,(06).
[2]王臻,胡敏,李响.基于层次细节简化和分形的真实感地形生成[J].合肥工业大学学报(自然科学版),2008,(07).
[3]龚桂荣,杜莹,欧阳峰.虚拟地理环境中地面逼真感的实现方法[J].测绘科学技术学报,2009,(06).
[4]赵娟.ArcGIS插值方法对比及其在云南省土壤污染状况调查中的应用[J].环境科学导刊,2010,(S1).
[5]400320142导航监视台设置场地规范:第2部分 监视[S].
[6]田茂义,曹洪松,刘如飞等.基于ArcGIS和Global Mapper软件的三维地形可视化技术的应用[J].全球定位系统,2011,(02).
猜你喜欢
黑龙江交通科技(2022年7期)2022-08-25 03:35:14
黑龙江交通科技(2022年4期)2022-06-07 09:09:12
中华建设(2021年2期)2021-03-04 08:56:04
交通科技(2021年1期)2021-03-03 02:08:02
中国计算机报(2020年9期)2020-03-25 15:10:34
城市建设理论研究(电子版)(2019年12期)2019-10-29 09:15:46
北京航空航天大学学报(2017年7期)2017-11-24 05:27:26
汽车与安全(2017年9期)2017-09-29 01:36:57
居业(2017年5期)2017-07-24 13:56:27
电脑迷(2014年24期)2014-04-29 21:55:14