
仿生假手的温度感知技术研究
2016-01-19 01:40:28,,
机械与电子 2015年10期
,,
(西安交通大学机械工程学院,陕西 西安 710049)
Research on Temperature Sensing Technology for Bionic Prosthetic Hand
TIAN Yanju, ZHANG Xiaodong , ZHANG Liming
(School of Mechanical Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
仿生假手的温度感知技术研究
田艳举,张小栋,张黎明
(西安交通大学机械工程学院,陕西 西安 710049)
Research on Temperature Sensing Technology for Bionic Prosthetic Hand
TIAN Yanju, ZHANG Xiaodong , ZHANG Liming
(School of Mechanical Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
摘要:为了使仿生假手能最大程度地模仿人手的感知功能,首先根据人类的实际需求进行温度感知方案的论证,然后针对假手的温度传感器进行选型并进行测温原理分析;根据选定的方案,进行温度感知各个模块的设计;最后搭建整个测温系统并利用Proteus进行仿真分析,最后针对该系统进行了实验验证,实验结果表明,具有该温度感知系统的假手能够实现待抓取物温度感知功能,且不影响假手的正常抓握。
关键词:温度感知;仿真分析;实验研究;仿生假手
中图分类号:TP241
文献标识码:A
文章编号:1001-2257(2015)10-0012-05
收稿日期:2015-06-25
基金项目:国家自然科学基金资助项目(51275388)
Abstract:In order to make the bionic prosthetic hand has maximum sensing functions, temperature sensing schemes are demonstrated based on human’s need. Then temperature sensor is selected and measurement principle is analyzed. According to the scheme, each module is designed. At last the whole system is obtained. With the system, simulation analysis with Proteus and experimental verification are finished. The experiment result shows that the prosthetic hand with temperature sensing system can help sense temperatures without affecting the prosthetic hand’s normal use.
作者简介:田艳举(1988-),女,河南安阳人,硕士研究生,研究方向为智能假肢的开发设计;张小栋 (1967-),男,陕西周至人,教授,博士研究生导师,研究方向为智能检测诊断与控制技术、智能机器人技术、生物电信号检测技术及工程应用; 张黎明 (1994-),男,河南新乡人,硕士研究生,研究方向为智能机器人技术。

Key words:temperature sensing; simulation analysis; experimental research;bionic prosthetic
0引言
在仿生假手对对象感知方面,国内外已有一定的研究,比如日本东京电气通信大学的 Shimojo M 等人利用压力敏感导电橡胶研制了一种新型的触觉传感器,并安装在机器人的4个手指上,实现了物体的柔顺抓取;哈尔滨工业大学通过在残存肢体皮肤表面安装振动电机间接感知假手与抓握对象的触觉信息,即将触觉信息转换成皮肤触感传递会大脑,实现了假手的触觉感知;清华大学研制了具有触滑觉功能的肌电假手,以有机压电(PVDF)材料为敏感元件,当假手接触物体并滑动时,敏感元件产生交变的响应信号,利用该信号实现了对物体滑动的判断;为了假手运动更加稳定、更加智能化,王伟等人在假手上集成了力/位置传感器,使抓取过程更加仿人化;本实验室在第二代仿生假手上安装了触滑觉传感器,实现了触滑觉感知。
随着感知技术的提高,人手所具有的感知功能越来越多的被应用在假手上,使得仿生假手在智能化和实用化的基础上更推进了一步。在人手的诸多感知功能中,对仿生假手的温度感知技术研究甚少。但人手作为直接与外界环境接触的部位,其感知温度的功能不可小觑且不可替代,比如洗漱时,人习惯于先用手感知水温是否过冷或过热,然后再决定是洗漱还是调节水温。人手作为人体最灵活的部位,当其接触到过冷或过热的物体时,它能够迅速脱离物体,从而规避危害。而且,由于人手经常接触不同的物体,其较身体其他部位具有更强的耐热性和耐寒性,过高或过低的温度对人手和其他部位的伤害程度不同。因此对仿生假手展开温度感知的研究就显得非常重要。
1假手的温度感知系统
1.1 温度感知方案论证
为了对仿生假手的温度感知进行研究,从而为其后续操作提供参考,提出以下2种方案:
方案1。设定仿生假手温度感知的阈值,当超出该阈值时,温度感知系统启动报警系统,从而引导下一步假手的动作操作。
方案2。通过液晶显示屏将温度显示出来,残疾人根据该温度自行决定下一步的操作,或者放弃操作物体或者开启下一步的动作。
比较2个方案,方案1虽然系统简单,但该方案互换性差,对于不同的残疾人需要设定不同的阈值,且不能满足同一残疾人不同时刻对不同温度的需求。方案2虽然系统复杂,但互换性很好,能够满足残疾人对不同温度的需求。因而,该仿生假手采用方案2完成温度感知系统的搭建。
1.2 传感器的选择及原理分析
从假手的结构及经济性考虑,选用接触式温度传感器。由于热敏电阻线性度极差,并在很大程度上依赖于生产工艺,且制造商一般给不出标准化的热敏电阻曲线,而热电阻电阻和温度的关系在有限范围内呈线性关系,便于后续的单片机处理,因而选用热电阻作为假手的温度敏感元件。由于人手经常接触的是0~100 ℃以内的物体,且当温度高于100 ℃或低于0 ℃的时候,人可以通过其他的感知功能(如视觉)意识到温度过高或过低,因而该假手的测温范围设定为0~100 ℃,测量的误差为±0.5 ℃。PT100是一种稳定性和线性都比较好的铂丝热电阻传感器,经常作为标准电阻温度计使用,其在0~100 ℃范围内线性度良好。其热响应时间小于30 ms。PT100满足假手的温度感知需求,因而选用PT100作为测温元器件。
PT100薄膜薄电阻的厚度只有0.8~0.9 mm,通过黏合剂能够很好的粘贴在假手上,使得在测温的同时而不影响假手的正常抓取操作。PT100的阻值与温度变化近似成正比,其变化关系为:当PT100温度为0 ℃时,它的阻值为100 Ω;当PT100温度为100 ℃时,它的阻值为139.10 Ω。
1.3 温度感知系统的组成
设计的温度感知系统拟采用PT100作为温度传感器,AD623作为信号放大器,TLC1543作为A/D转换元件,AT89C51作为信号处理单元,LCD1602作为显示器件。
假手抓取物体后,PT100与物体良好接触,物体的温度变化引起PT100阻值的相应变化。测温的模拟电路将当前PT100的阻值转换为容易测量的电压值输出,经过放大器放大后通过A/D转换器将模拟的电压值转换为数字信号,该数字信号输入AT89C51单片机,经过单片机的数据处理后将温度传感器的电阻值转换为温度值,并由液晶显示屏进行显示。该系统包括PT100的测温单元、信号处理单元、A/D转换单元、单片机数据处理单元以及温度显示单元,其系统组成如图1所示。

图1温度感知系统的组成
1.4 温度感知系统的模块设计
1.4.1PT100传感器的布置
PT100温度传感器可以通过粘贴到假手手心或者指节内侧(靠近手心的一侧)来达到测温的目的。假手手心为平面,粘贴PT100方便且牢固,但是由于精确抓取过程中,物体并未与手心接触,因而该方案不能满足需要。而如果将PT100布置在食指的远指节上,虽然粘贴不太方便,但无论是精确抓取还是力度抓取时,PT100均能达到测温的目的,因而PT100采用布置在假手食指远指节的方案。由于食指远指节的表面积远大于PT100,此时若采用一片PT100测温,则待抓取物体不一定能够与PT100接触,因而需要按照一定的规律在仿生假手上布置多个测点。
测温系统中,拟采用的办法是,在手指中线布置若干个PT100,作为待抓取物体的测温元件,并在手指的外缘布置一个PT100,作为环境测温元件。PT100布置如图2所示,中线一共布置3个PT100,其中中线上的PT100比手指边缘的PT100位置上凸出一定高度,以保证当手指抓取到物体,即中线某个PT100与物体接触时,环境测温的PT100与物体不接触。由于在抓握物体时假手的手指与物体为点接触,因而假手手指中线上的PT100只有一个能够与物体接触,而位于手指边缘的PT100可以感知环境温度。通过中线PT100上电压与手指边缘PT100上电压的差分关系,可以得到与物体接触的PT100上的电压值,经过一定的转换关系,可以得到与物体接触的PT100的温度,即为物体的温度。
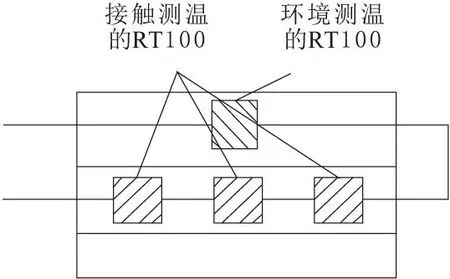
图2 PT100布置
1.4.2恒流源的设计
PT100作为电阻式温度传感器,其测温原理是抓取物的温度引起PT100阻值的变化,通过电路将PT100的阻值转变为容易测量的电压或电流信号,再将该模拟信号转换成数字信号,通过信号的处理将其显示为相应的温度。PT100的信号获取电路一般有单臂电桥式或恒流源式,如图3所示。
方案1。采用惠更斯电桥,如图3a所示。其中R1、R2、R3的阻值恒定且相等,当PT100有一个阻值R4的时候,则对应输出一个电势差Uo,即有
(1)
由式(1)可以看出,PT100的阻值与输出电压Uo为非线性关系。
方案2。设计一个恒流源通过PT100,从而得到电压值,如图3b所示。

图3 信号获取电路
由于单臂桥式电路输出的电压信号与PT100电阻的变化不是线性关系,因而单片机处理比较复杂;而恒流源的电路输出的电压信号与PT100的电阻变化呈良好的线性关系,便于后续处理,因而本系统采用恒流源的信号采集电路。
恒流源的电路,有的采用三极管或者专用恒流源,也有通过一些器件的巧妙设计实现的,系统采用廉价的运放来搭建,如图4所示。由于运算放大器虚地,所以OP07的反向输入端电压为0 V,则R2上端电压为0 V。由于该电路中采用了精密电压源LM336为-2.5 V,同时外加调整电阻RV1以及限流电阻R1,所以R2下端电压可调整为-2.5 V,则R2两端电压为2.5 V,根据PT100铂丝电阻的限流范围,此处选用1 mA的电流,因而选用电阻R2的阻值为2.5 kΩ。由于运放的输入阻抗极高,输入端可以认为输入电流为零,因而流经PT100铂丝电阻的电流等于流经电阻R2的电流,从而达到了恒流的目的。

图4 恒流源的电路
1.4.3信号调理电路的设计
由于恒流源的电流为1 mA,而PT100在0~100 ℃的阻值范围为100 ~139.10 Ω,则施加在每个PT100两端的电压范围为100~139.10 mV,电压信号非常微弱,因此该感知系统需要设计放大电路。在本系统中,由于引入了测量环境温度和抓取物温度两种作用的PT100,所以需要对信号进行差分放大。系统中,拟采用±6 V作为所有运放的电源电压,由于共模电压和差分电压总和远小于电源电压,因而应该选用仪表放大器作为差分放大元器件。
由于Proteus中AD620模型错误,所以选用与之性能几乎一致的AD623,以方便电路的仿真分析。AD623的增益通过一只外接电阻可方便的调节。无外接电阻条件下时,AD623被设置为单位增益(G=1),接入外接电阻时,增益可高达1 000。AD623的共模抑制比随增益的增加而增大,同时可以保持最小误差。AD623功耗较低,电源电压范围比较宽,并且线性度、温度稳定性、可靠性比较好。AD623的内部是三运放结构,1脚和8脚之间外接增益电阻RG,增益表达式由G=1+100 kΩ/RG确定。
设计的调理电路如图5所示,由于测量环境温度的PT100只有一个,即RT0,而用于测量抓取物温度的PT100有3个,分别是RT1、RT2、RT3,所以RT0的电压需经第1个AD623放大3倍输出电压U1,然后才能进行减法运算。OP07的输出电压U2与U1差分输入第2个AD623进行第2级放大。第2个AD623的差分输入即为施加在与物体接触的PT100两端的电压,其范围为100~139.10 mV。考虑到AD623的放大倍数的线性度受电源电压制约,+6 V和-6 V供电时,线性度在-3.6~+3.6 V间,因此2级放大倍数选择20,相应的第2个AD623的输出电压U3的范围为2 000~2 782 mV。由于该放大倍数不能满足测量精度要求,所以该调理电路中又设计了3级放大电路。在3级放电路中,第2级放大电路的输出U3与2 000 mV的电压差分输入第3个AD623,这样可以将PT100 的0℃对应100 Ω的阻值偏置掉,得到第3级放大电路的差分输入为0~782 mV,根据AD623的线性范围,选择放大倍数为4倍,对应的第3级放大输出U4的范围为0~3128 mV。经过3级放大,既满足了测量精度的要求,也使AD623的输出限制在其线性区内。

图5 信号调理电路
1.4.4温度感知系统
系统采用AT89C51处理数字信号,并将最终的温度示值显示在液晶显示屏上。其流程如图6所示。

图6 温度感知系统流程
2温度感知系统实验
2.1 虚拟仿真实验
按照上述原理在Proteus中绘制电路仿真图,并进行实验。由于Proteus的器件库中没有精密电压源LM336-2.5V的模型,所以这里采用-2.5 V的恒压源来代替。本系统中,通过改变4个PT100的温度示值(其中RT1~RT3中的一个PT100的温度示值与其他3个不同)进行实验。实验显示,如果严格按照增益电阻的理论计算值来设定电位器的值,则实验得到的温度值与PT100设定的温度之间的误差超出设计要求。根据实验理论值和实际值的差异,微调电位器R5。在实验中,假设环境温度为0 ℃,抓取物体的温度为100 ℃,则设置标号为RT1的PT100的温度示值为100 ℃,其他3个PT100的示值为0 ℃,实验结果为99.8 ℃,满足设计要求。
为了检验该温度感知系统是否正确,按照上述实验说明进行若干组实验,实验结果表明该测温系统不受环境温度影响,系统最大误差为+0.3 ℃和-0.1 ℃,满足设计要求,验证了该温度感知方案的可行性。
2.2 仿生假手的温度感知系统实验
根据上述温度感知系统的原理利用实验室现有元器件搭建假手的温度感知系统,利用该系统感知水杯的温度并与红外线温度计的测温效果进行对比,如图7和8所示。首先分别用两种方式测量6组实验,并通过微调增益电阻用红外测温的结果对温度感知系统的结果进行校准。利用校准后的温度感知系统进行20组测温实验并在相同的条件下进行红外测温的验证,实验结果为:温度感知系统的20组实验中,18组实验的误差在±0.5 ℃以内,剩余2组实验的误差分别为0.6 ℃和0.9 ℃。实验结果表明该仿生假手的温度感知系统偏离设计目标的误差为10%,该误差产生的原因有:①红外线温度计本身有误差;②温度感知系统各个模块存在误差。

图7 假手感知水杯温度实验
图8 红外线温度计测量水杯温度实验
综合考虑上述2个误差原因及2组实验的温度偏差程度,说明在正确率允许的范围内,该系统满足了仿生假手的设计需求。此外,该温度感知系统实验的响应时间不超过4 s,满足残疾人的使用需求。并且,整套温度感知系统仅需100多元,满足价格低廉的实际需求。
3结束语
通过分析人手的温度感知功能对生活的重要性及残疾人对于仿生假手的温度感知需求,确定了仿生假手的温度感知方案。根据假手的形状及实际需求,选用了PT100作为假手的温度敏感元件。通过电路的合理设计,完成了整个感知系统的设计。Proteus中的虚拟仿真结果验证了该系统满足设计要求。仿生假手的温度感知实验则验证了设计的温度感知系统的正确性及实用性,从而使得仿生假手在感知仿生方面更推进一步。
参考文献:
Shimojo M,Namiki A,Ishikawa M,etal.A tactile sensor sheet using pressure conductive rubber with electrical-wires stitched method. Sensors Journal , IEEE , 2004 ,4(5):589-596.
汤奇荣,姜力,李楠,等.肌电假手感觉反馈机理研究.传感器与微系统,2008,27(8):72-74.
姜明文,王人成,罗志增.具有触滑觉功能的肌电假手.清华大学学报(自然科学版),2004,44(8):1051-1053.
王伟,姜力,王新庆.具有力/位感知的仿人假手拇指机构.哈尔滨工业大学学报,2010,42(9):1403-1407.
卫永琴,高建峰.一种恒流源电路的巧妙设计.仪器仪表学报,2006,27(9):1170-1172.
猜你喜欢
科学与财富(2016年18期)2016-12-22 17:50:59
科技创新与应用(2016年33期)2016-12-17 12:31:48
武术研究(2016年9期)2016-12-15 22:38:00
教育界·上旬(2016年4期)2016-12-13 10:16:01
农业与技术(2016年20期)2016-12-08 19:49:36
中国科技纵横(2016年17期)2016-11-30 11:11:44
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:11:04
校园英语·上旬(2016年10期)2016-11-16 18:12:40
中小企业管理与科技·上旬刊(2016年10期)2016-11-15 10:03:03
体育时空·上半月(2016年11期)2016-11-11 12:33:07
