远程换热站综合自动化监控系统的设计
2016-01-18 05:46:08
自动化与仪表 2016年8期
(内蒙古科技大学 信息工程学院,包头 014010)
市集中供热系统中,换热站是连接用户和热源厂的关键纽带,其供热品质对供热质量起到非常重要的作用,同时,热用户在供热的稳定性与质量方面提出了更多的要求。为了让整个供热系统最终能够在最佳的工况下工作以便取得更好的效益,监控各个换热站的工作状态便成为了整个控制系统的关键任务,而且要通过这些信息来对换热站实施适当的调节。实施本地控制的换热站是一个复杂的系统,而且影响因素较多,致使精确的控制几乎成为了不可能,还有气象条件相当复杂的变化,同样使其不可能被准确地预测[1]。因此设计了远程和本地监控系统并主要制定了由模糊控制器和遗传算法PID控制器组成的串级控制器来解决此问题。
1 换热站控制系统的总体设计
热电厂的高温过热蒸汽经过汽-水换热器形成高温热水送到上级换热站,各下级换热站将一次管网的高温高压热水再经平板式水-水换热器转换为供暖热水,然后通过二次供热管网的循环系统将热能输送给热用户[3]。补水系统会补充二次管网中的失水,保持系统平均压力的恒定。二次管网中的循环水通过换热站的二次管网供、回水压力差的驱动循环流动。换热站控制系统的工作原理如图1所示。
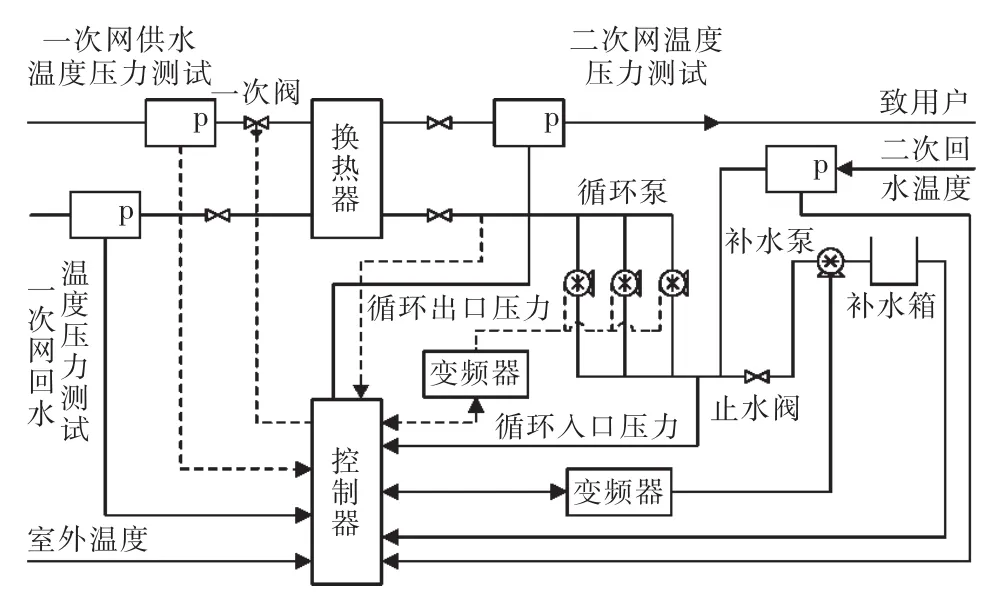
图1 换热站控制系统工作原理Fig.1 Working principle diagram of the control system of the heat exchanger station
针对集中供热系统的特点和计算机应用技术,选用模糊控制器和遗传算法PID控制器相结合构造成一串级控制器,第一级控制器是模糊控制器,由温度采集模块DDMF5-8ADK热电偶采集室外温度和一段时间内室外温度的变化作为前级模糊控制器的输入,输出是下级换热站二次管网供水温度的设定值。此设定值作为第二级控制器的输入,通过构造模糊控制器来获取二次网的预设值,该方法较温度调节法和温度补偿曲线法,干扰和参数变化对控制效果的影响将会被极大地减弱,具有更佳的动态特性[6];第二级控制器是遗传算法PID控制器,用来控制变频器使得二次供水温度稳定在预设值,遗传算法PID控制器用遗传算法理论对PID的3个参数Kp、Ki和Kd进行优化,通过控制一次网一次阀的开度来调节水流量[9],动态地跟踪二次供水温度的变化,实现对二次供水温度的控制。据此目的设计的串级控制器原理如图2所示。
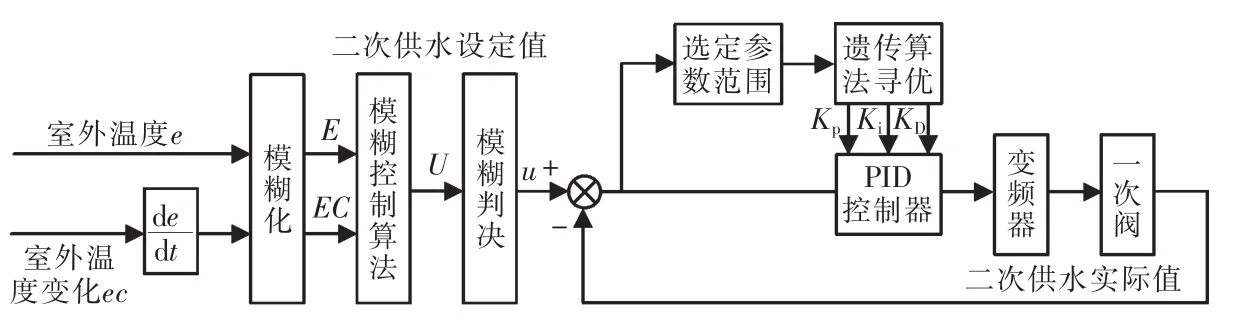
图2 串级控制器原理Fig.2 Principle diagram of the cascade controller
2 换热站监控系统的设计
此换热站的二次管网供水温度串级模糊控制器、循环系统和补水系统的PID工艺环节控制功能的实现是以控制网络为载体的[2]。系统控制网络核心选用了基于西门子PLC的Profibus现场总线体系。根据生产过程中的设计要求,集中供热的换热站控制系统采用本地和远程2种监控模式,本地监控主站由西门子S7-300PLC,以及PC机上的WinCC6.0组态软件和CP5611通信板卡组成,主要完成对本地的监控和生产管理等工作;本地监控从站由西门子S7-1200 PLC,变频器G150、温度采集DDMF5-8ADK 8路K分度热电偶和远程I/O站ET200组成,作为基础控制层,主要用于完成对现场的数据采集工作与生产过程中的控制等;远程监控中心主站由PC机上安装的WinCC6.0组态软件和SINAUT MICRO SC(OPC路由软件)组成,远程终端站由S7-1200以及安装的GPRS无线通讯模块CP1242-7组成,CP1242-7通过 PPI电缆型号为6ES7214-1AE30-0XB0与S7-1200PLC进行数据的发送与接收[4]。将二次供回水温度和室外温度输入到温度采集模块DDFM5-8ADK中,室外温度作为前级控制器的输入,其输出的二次供水温度的设定值和二次供回水温度作为后级控制器的输入,输出则通过遗传算法PID控制器来追此值。同样供回水温差作为循环泵系统的输入,通过调节变频器频率来实现恒温差控制。将循环泵入口压力和出口压力求平均值作为补水系统的输入[8],输出值则通过PID控制器来追此输入值。其网络结构如图3所示。
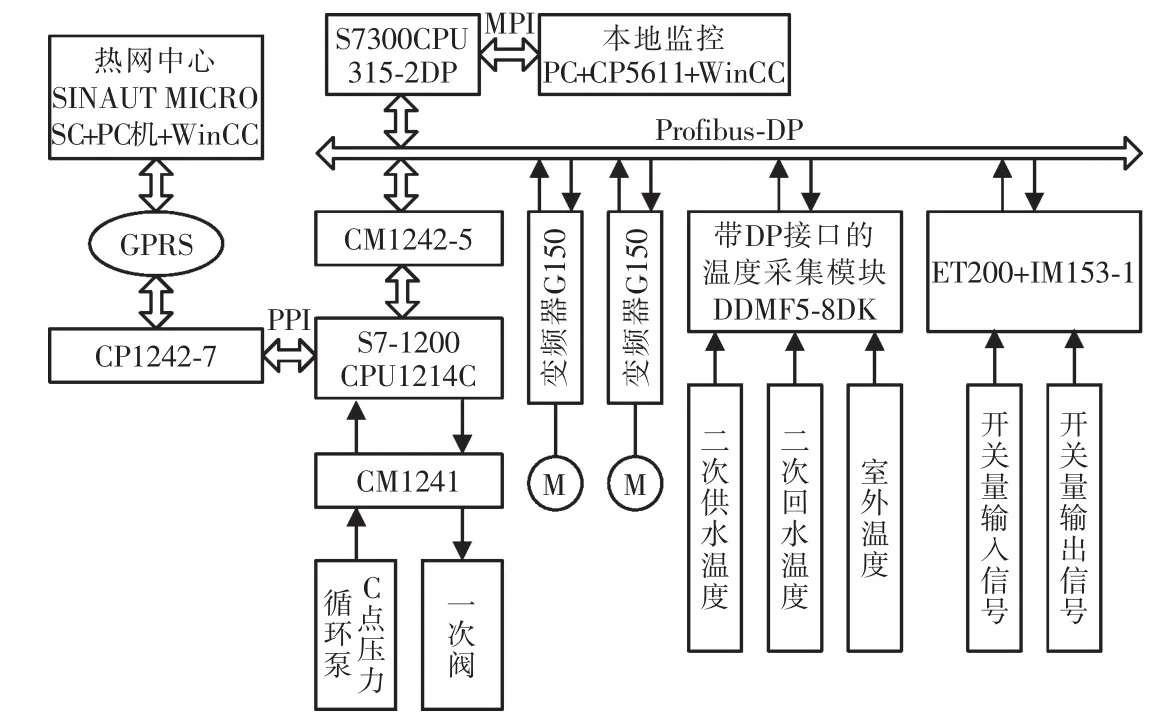
图3 换热站控制网络结构Fig.3 Control network structure of the heat exchanger station
3 换热站监控系统软件设计
3.1 串级控制器的设计
3.1.1 前级模糊控制器构造步骤如下:
1)模糊化输入、输出变量。以当地多年的气象资料为基础,设定室外温度e的范围为[-20,20],室外温度变化ec的范围为[-12,12],换热站二次管网供水温度设定值u的基本论域范围为[20,70],e,ec,u各变量均选取7个模糊子集 {NB NM NS ZO PS PM PB},选取三角形为隶属度函数曲线。
2)模糊控制规则的确定。结合人工操作的经验和总结的规律得出如下的规则库,如表1所示。
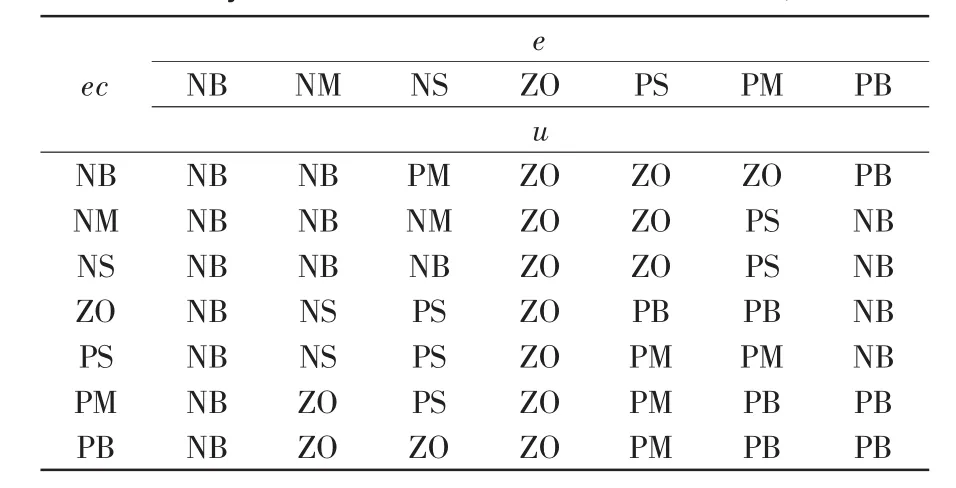
表1 e,ec和u的模糊关系规则表Tab.1 Fuzzy relations of the rule table of e,ec and u
3)输出变量清晰化。模糊控制器的输出,需要经过反模糊化的处理后才能输出。去模糊化的方法包括重心法、最大隶属度法、中位数法等。本设计中模糊控制器的清晰化方法采用重心法。
3.1.2 后级遗传算法PID控制器优化算法
1)参数的二进制编码
要先确定KP、KI、KD3个参数的范围,然后采用二进制编码并确定编码长度n。将每个参数进行二进制编码得出子串,再将得到的子串们连成一个完整的染色体。选择二进制编码长度为20。
2)随机产生初始种群
随机产生种群的方法适用于对系统问题的解无任何先验知识的情况。对本文的控制对象无任何先验知识,因此选用此方法产生初始种群,初始化样本种群数位是20。
3)适应度函数
适应度函数是个体对环境适应能力大小的表现,由于针对的问题不同,适应度函数定义的方式也会不同。就函数优化的问题,常常选目标函数作为适应度函数。参数优化设计中关键要选准性能指标,由于这个指标必须能同时反应系统的动态性能和稳态特性,因此选择系统的最大超调量和稳态误差的和的倒数作为适应度函数,即:

4)选择
进行选择操作是要从当前群体中选出生命力强的染色体,使它有很大机会保留供繁殖后代使用。判断染色体优良与否的准则就是各自的适应度值,此值越大,则被选中的机会也会随之增大。本文是根据系统的超调量和误差的大小来确定系统的适应度值,按照得到的个体适应度值的大小对其进行排序选择。
5)交叉
本文选择的是二进制交叉中的单点交叉,就是说系统会随机产生一交叉点位置,2个父本个体在交叉点位置左边的部分进行基因码互换,形成2个子个体。类似的完成其他个体的交叉操作。交叉操作的频率是由交叉率的选择决定的,频率越高,可更加迅速地收敛到最优希望的最优解区域,因此要选较大的交叉率,但也不可太高,因为可能导致过早收敛,一般取0.4~0.9,本文选择0.9。
6)变异
对于二进制编码的个体而言,变异即个体上某一位以一定的变异率发生翻转,即0变成1,1变成0。变异率的选择一般受种群的大小和染色体长度等因素影响,通常变异率取很小的值,本文选择变异概率为0.01。
3.1.3 遗传算法PID参数优化的实现
1)初始群体的产生。在按经验法整定的PID控制器3个参数值附近,用均交设计法产生一定规模的初始群体。
2)计算个体适应度值。按照定义的适应度函数来对群体中的每个个体进行适应度计算。
3)进行遗传操作。进行选择、交叉和变异操作,产生新的种群。
4)新种群适应度的计算。如果满足终止条件,那么表示已找到最佳参数,接着进行选择、交叉以及变异操作。否则回到步骤3),再次进行新的遗传操作过程,直到满足终止条件为止。
3.1.4 实验结果与分析
为了检测遗传算法优化PID参数的控制效果,选用单回路PID控制器进行测试,实验得到的目标函数为

利用传统经验参数控制方法与遗传算法参数优化方法进行对比实验,取种群大小为60,交叉率Pc为 0.9,变异率 Pm为 0.01,最大迭代数 1000,常规工程整定法得出的PID调节器的参数值Kp=25.1,Ki=3.2 min,Kd=0.58 min。分别得到的温度响应曲线如图4和图5所示。

图4 经验法仿真结果Fig.4 Simulation results of the experience method
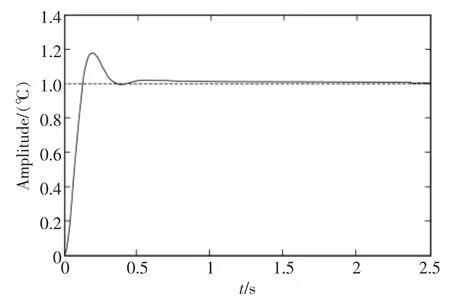
图5 经过遗传算法优化后的仿真结果Fig.5 Simulation results after optimizing by the genetic algorithm
比较图4和图5,后者的调节时间t=0.5004 s<0.8 s,超调量 σ%=26.94%<30%,由此可知,和传统的PID控制系统相比基于遗传算法优化的PID控制系统具有更小的振荡幅度和更短的振荡时间,因此利用遗传算法对PID参数进行优化是一种很有效的优化方法。
3.2 本地监控站Profibus-DP通信的设计
1)与G150的通信。设定G150本身的参数:P0976为 4,P1000为 6,即 P0700为 6,然后 G150由Profibus电缆经过通信模块连接到DP网上,选择4PKW,2PZD的数据区,通信报文为PPO1,在OB1中调用SFC14和SFC15,完成对G150数据的读写。
2)与S7-1200 CPU1214C的通信。需将CM1242通信模块的GSD文件安装于STEP7中,S7-1200中将需进行通信的数据整理后存放于S7-1200的存储区与S7-300组态CM1242从站时的硬件地址相对应就行。
3)与DDMF5温度采集模块的通信。将此温度模块的GSD文件安装于STEP7中,DDMF5会按照字的方式来从Profibus网络中读取从PIW0~PIW14代表的8个模拟量输入通道的数据。
4)与ET200的通信。作为远程的I/O站,ET200组态时选择其接口IM153-1并且设定5为站地址,通信速率则选定为1.5 Mb/s,组态的站地址必须保证与IM153-1上面的拨码开关的站地址是一样的[8]。然后组态ET200M上的I/O模块只使用其DI/DO模块中的SM323DI16来收集系统的开关量信号。
3.3 监控站GPRS通信的设计
在远程监控中心主站的PC机上安装WinCC6.0组态软件SINAUT MICRO SC,PC机通过OPC连接到网络[7]。在终端站S7-1200上安装GPRS无线通信模块SINAUT CP1242-7,并插人SIM卡,然后在S7-1200上安装GPRS无线通信进行初始化所需要的库程序,此库文件可以在SINAUT MICRO SC的CD中找到,库文件有4个程序块:WDCINIT,WDC-RECEIVE,WDC-SEND 及 WDC-CONTROL。GPRS无线传输的过程:首先使用S7-1200专用的GPRS无线数据通信模块CP1242-7将从站采集到的现场参数发送到GPRS网络,接着再发送到INNET上,然后通过端口映射将这些数据发送到SINAUT MICRO SC软件上,在OPC模式下,SINAUT MICRO SC会将数据传于WinCC软件,并给远程监控终端发送确认信息,在终端,有WDC-RECEIVE子模块用来接收和确认信息,而且有WDCSEND子模块来发送确认信息,最后作为OPC的客户端,WinCC会访问OPC路由软件来实现与S7-1200系列PLC之间的数据交换。
4 结语
串级控制算法中的第一级使用模糊控制算法来排除一定的干扰并且减弱参数变化对控制效果带来的影响,第二级使用遗传算法,用遗传算法来对PID控制器的Kp、Ki及Kd3个参数进行优化,运用Matlab软件仿真之后表明:PID调节器参数经过遗传算法优化后具有更小的超调量和更快的响应速度,使系统的热量传递效率更高,系统更加可靠;用Profibus-DP总线来实施数据交换,可以提高通信的速率;GPRS无线通信的运用实现了对供热状态的动态跟踪监视及对换热站现场的运行参数的实时在线监控[5]。系统运行两年多,一直稳定可靠的运行。串级控制器的设计思路同样可用于工业锅炉、中央空调制冷系统等控制系统领域,且在同类系统的设计中有一定的参考价值。
[1]许思猛.基于PLC的自整定PID温度控制设计[D].福建:福建工程学院,2011.
[2]田海,崔桂梅,王晓红,等.西门子PLC控制网络的配置策略与应用[J].电气传动,2010,40(1):76-80.
[3]朱永亮.城市热网远程监控系统[D].包头:内蒙古科技大学,2010.
[4]刘笃仁.PIC软硬件系统设计[M].北京:机械工业出版社,2011.
[5]王海燕,杨平,王志萍.基于GPRS技术的电能质量在线监测系统[J].低压电器,2010(19):30-33.
[6]刘修廷.模糊理论在集中供热系统中的应用研究[D].山西:中北大学,2010.
[7]梁涛,马爱龙,孙鹤旭,等.具有GPRS远程通讯的换热站自动控制系统研究设计[J].电气传动,2008,38(7):69-72.
[8]蔡行健,黄文玉,李娟.深入浅出西门子S7-200PLC[M].北京:北京航空航天大学出版社,2006.
[9]臧洪泉,李晓恭.分阶段改变流量的质调节水温调节曲线的绘制[J].煤气与热力,2008,28(6):18-20.
猜你喜欢
计算机仿真(2022年8期)2022-09-28 09:53:02
建材发展导向(2021年10期)2021-07-16 07:13:26
经济技术协作信息(2018年22期)2019-01-19 03:00:18
山西建筑(2018年31期)2018-03-22 16:11:53
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
统计与决策(2017年2期)2017-03-20 15:25:24
中国塑料(2016年11期)2016-04-16 05:26:02
智能系统学报(2015年4期)2015-12-27 09:38:39
山东工业技术(2015年18期)2015-10-08 01:28:01