
一体化电源智能采集终端的研究与实现
2016-01-17 18:08:48刘春成贺洪江
自动化与仪表 2016年2期
刘春成,贺洪江
(1.河北工程大学 信息与电气工程学院,邯郸 056038;2.河北工程大学 装备制造学院,邯郸 056038)
随着工业技术的不断进步,智能电网高速发展,作为智能电网的补充,智能一体化电源已成为新一代工矿企业供配电必然的发展趋势。在控制过程自动化及网络化发展的同时,数据的传输量越来越大,对数据传输实时性要求也越来越高。本设计采用集成CAN控制器的高性能STM32F103VCT6作为采集终端的微处理器,使用高速集成82C250作为CAN收发器,设计一体化电源的数据采集终端[1]。
1 系统组成及工作原理
一体化电源监控系统结构如图1所示。系统由上位机和采集终端2部分组成。采集终端将采集到的模拟量通过STM32自带的AD转换成数字量,信号经过STM32处理,上位机接收到采集终端发送的数据后,通过数据判断电池组状态,超出阈值,系统报警;正常,继续接收。

图1 监视系统结构Fig.1 Monitor system structure diagram
现场电网正常时,供电电路中超级电容作为储能元器件;电网故障时,超级电容放电,终端继续工作,最长可维持工作时间100 s[2]。
采集终端采用CAN总线与上位机通信。将实时交直流电压、电池温度等信息传至上位机。上位机可以对实时电压、温度等数据进行查询。发生异常时,终端将故障电池物理连接切换到备用电池组。
2 终端电路设计
如图2所示,该采集终端由STM32微控制器、AD控制器、外部电源、接触器、液晶显示、拨码开关、CAN控制器组成。拨码开关对CAN总线传输速率进行选择;液晶屏显示交直流的实时电压及电池温度;CAN总线模块实现与上位机通信;接触器控制各电池节点的通断。
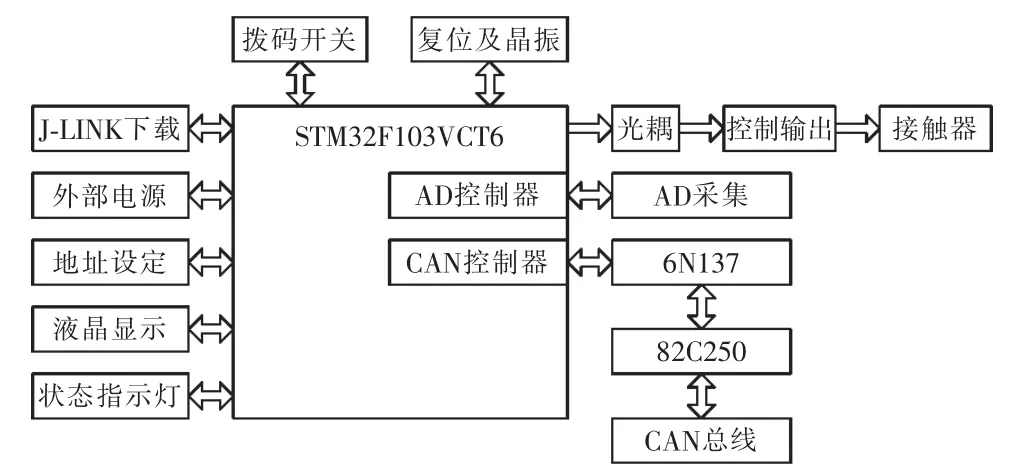
图2 采集终端结构Fig.2 Collection terminal structure
2.1 供电电路设计
现场电路工作正常时,处理器采用220 V交流经LA5-220S05ACDC电源模块转换成直流供电。供电电路如图 3 所示,C1,C41,L1,L2为电流感应器,当电压骤降、骤升时,起抑制作用,防止剧烈波动;R100限制C401充电电流;C401作为晃电时持续为控制器供电的电源,最长供电时间可达100 s,保证电源切换过程中数据采集不中断。
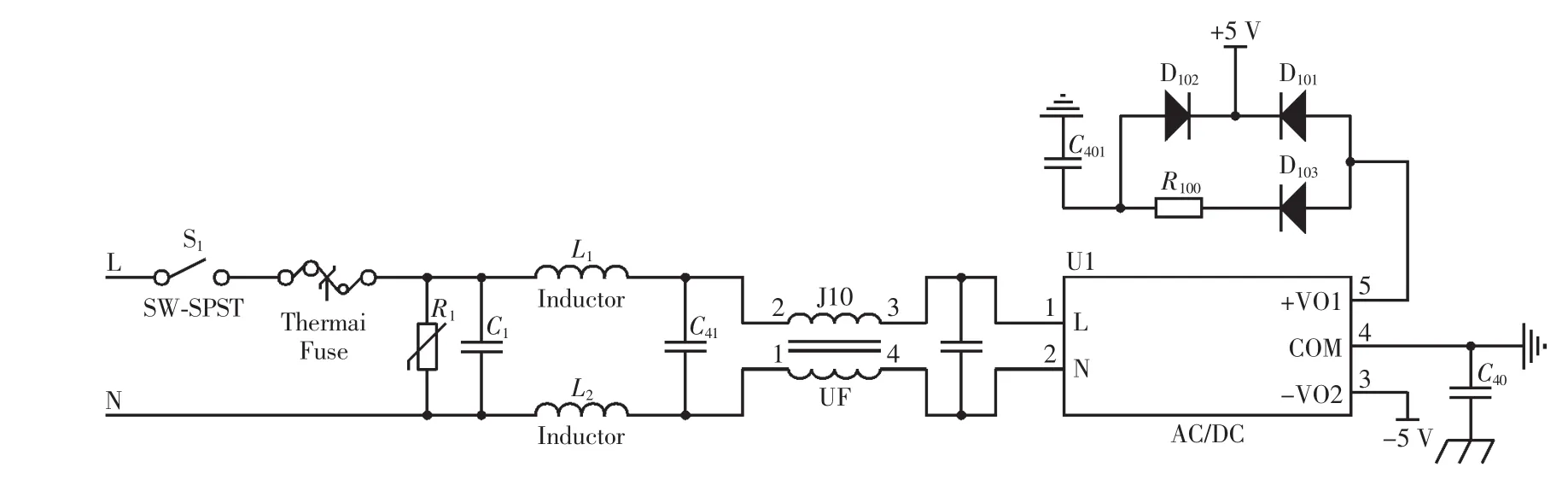
图3 供电电路设计Fig.3 Power supply circuit design
2.2 采集电路设计
目前交直流一体化电源系统中对蓄电池的管理主要是监测其总电压及故障报警。因此当监控中心收到报警信号时,不能对哪只电池出现问题、故障原因做出判断。本系统对该方面做了改进:终端将电池温度、单体电压直接通过CAN总线上传至上位机,监控中心对所有电池组工作状况进行实时监控。
在线精确测量蓄电池组单蓄电池电压一直是检测的难点,12 V电池组由6块2 V电池串联组成,常规电阻分压法、浮动地测量法,都存在精度低、抗感染能力差的缺点。由于测量时存在有用的差分信号同样又有共模干扰信号,为了能够抑制共模信号的影响,采用差分放大电路处理VADC[3],根据运放特性,得到输入输出信号的关系:

蓄电池组由6节2 V蓄电池串联组成,输出12 V。终端采用差分放大电路对2 V左右的小信号进行采集。电路中C202可以滤除输入端干扰信号;D1,D2保护运放输入端;由于是差分放大电路,所以电路上下电阻对称,即R51=R52,R54=R53;适当调整 R51,R52,R53,R54这4个电阻的大小就可得到需要的放大倍数。如图4所示。
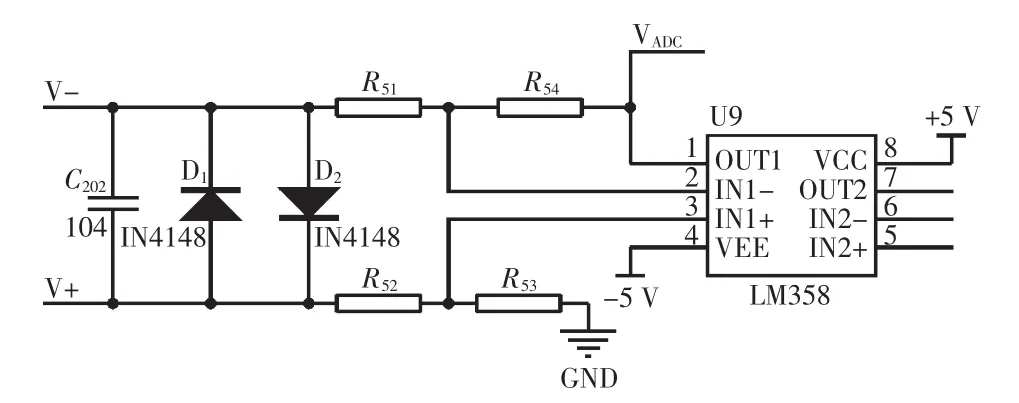
图4 采集单蓄电池电压Fig.4 Collection of single battery voltage
终端采用电压型精密互感器TV1013-2Z将220 V按照线性比例转换到0~3.3 V的电压信号识别范围,经滤波电路和运放构成的电压跟随电路,实现阻抗匹配后再将调理后的电压信号输入到A/D转换器进行模数转换。电压采集电路如图5所示。
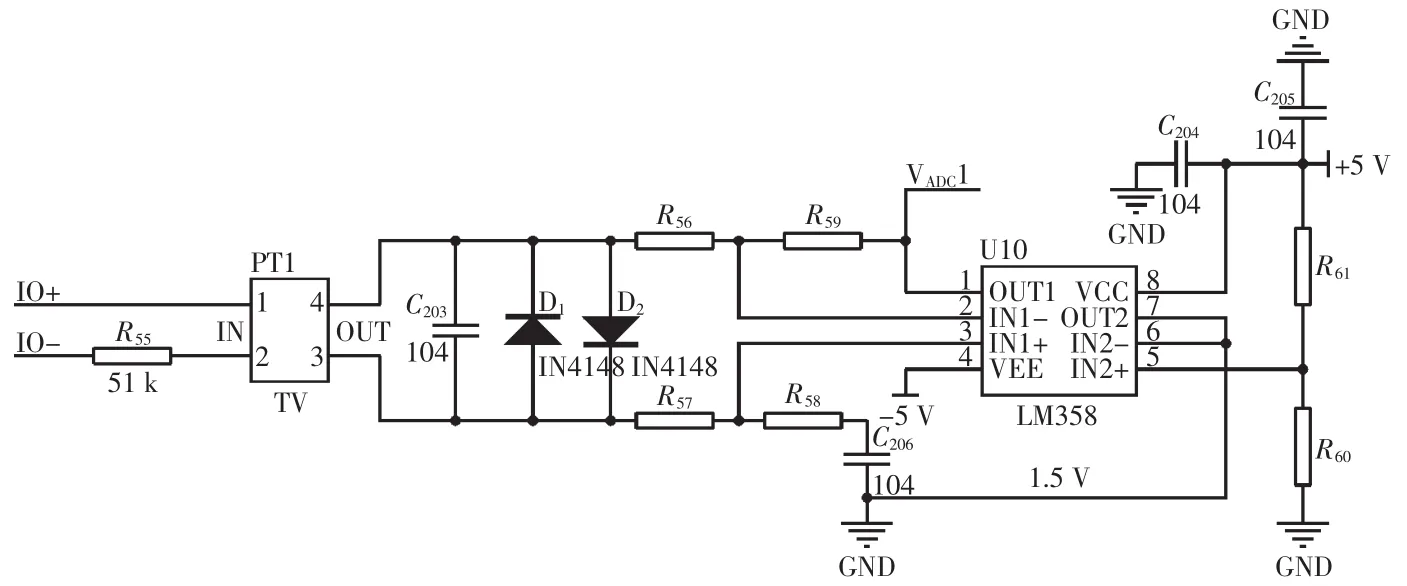
图5 交流电压采集原理Fig.5 AC voltage acquisition
2.3 CAN总线硬件设计
CAN收发器采用PCA82C250,电路中采用光电耦合器电气隔离,防止网络因故障烧毁主控芯片。PCA82C250是一款高速CAN收发器芯片,兼容ISO/DIS 11891标准,具有接口简单、体积小、性能可靠的优点。该模块的主要功能是将逻辑电平转换为差分电平。CAN总线传输差分信号,为防止因电阻匹配问题引起的信号反射,在网络的两端加上120 Ω的终端电阻。如图6所示。
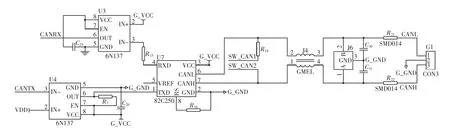
图6 CAN总线电路原理Fig.6 CAN bus circuit principle diagram
3 软件设计
软件设计决定采集终端的稳定性、采集精确度以及工作速度。软件设计包括采集终端主程序、CAN协议。
3.1 主程序设计
主控制程序包括AD模块、中断模块、定时器模块初始化、故障判断及采集误差的处理算法等。控制器根据采集数据判断电池工作状态,如图7所示。
3.2 CAN协议
CAN协议已成为工业控制领域标准通信协议之一,通过该协议,可以把不同厂商的设备组网,实现集中控制。
标准CAN协议有标准帧和扩展帧2种工作模式,终端采用CAN2.0B标准帧格式。帧格式如表1所示。CAN标准帧信息为11个字节,包括信息和数据2部分,前3个字节为信息部分,后8个字节为数据部分[4]。
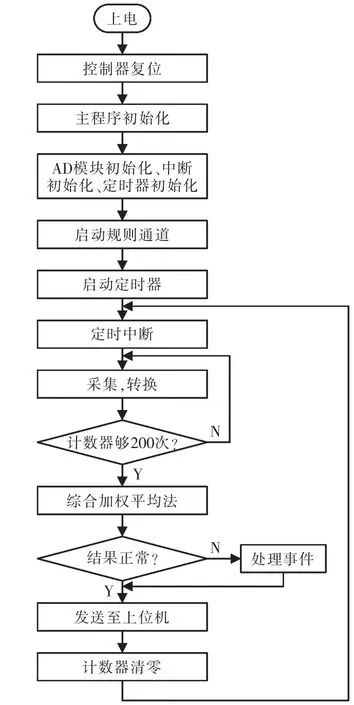
图7 软件流程Fig.7 Flow chart of software system
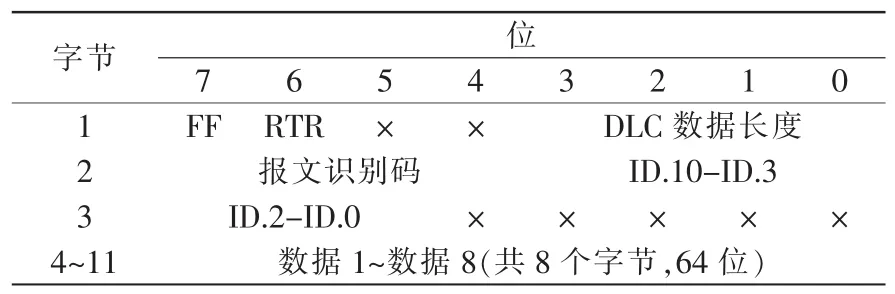
表1 CAN协议帧结构Tab.1 CAN protocol frame structure
规定主机地址为0x01,送达切断故障切除指令为0x0b。当发送数据位前4位为0xFF 0xFF 0xFE 0xFF,后3位为0xFF 0xFE 0xFF时,为命令字。
如主机需要1号模块(地址为0x02)切除控制区域内故障电池连接,则:主机发送:0x02 0x08 0x000xFF0xFF0xFE 0xFF0x0b0xFF0xFE 0xFF。此时终端接收到上位机发送的命令字0x0b后切除与故障电池物理连接。故障排除后,终端返回信息0x01 0x08 0x00 0xFF 0xFF 0xFE 0xFF 0x00 0xFF 0xFE 0xFF上位机接收到终端发送的信息,0x00表示程序执行完毕,故障排除。同时将接触器状态信息一同送达上位机。
通过CAN调试助手的性能测试,结果如表2所示,数据传输正确率达到99.97%,满足实际应用要求。

表2 通信性能测试Tab.2 Communication performance test
4 实验结果及分析
实验中,随机抽取了正在充电的2个电池组,在同等环境下采用万用表和高精度温度计检测的数据作为实际测量值。选取的2组电池数据与其进行对比,如表3各个电池电压和温度。测试结果表明电池电压的最大测量误差为1.59%,温度的最大测量误差为2.23%,其测量误差在3%以内,属正常范围,达到现场应用要求。
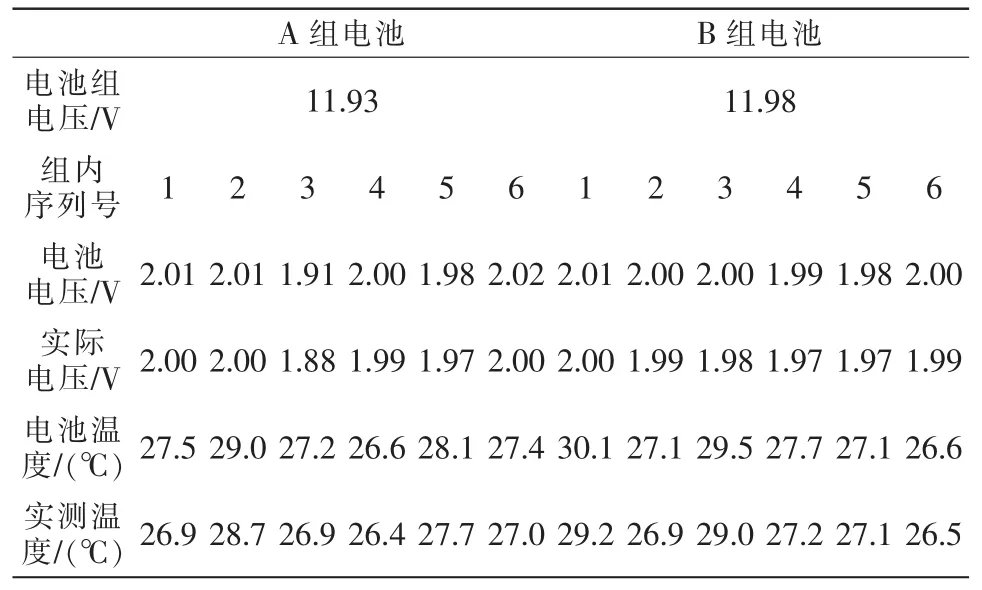
表3 电压温度采集实验结果Tab.3 Voltage temperature collection and the experimental results
5 结语
本设计以STM32为控制核心,解决了传统的一体化电源数据采集终端处理速度慢、测量精度低、并行处理能力差的问题。通过CAN总线与上位机组网,数据传输的实时性与抗干扰能力显著提高。经测试,终端运行稳定、实时性好、准确性高、抗干扰能力强,可以投入实际应用。
[1]郭永锋.CAN总线与RS-485总线的技术优势对比[J].中国新通信,2012(15):47-48.
[2]王楠楠,刘春英.基于STM32的低压电机再启动控制器设计[J].自动化与仪表,2014,29(7):69-72.
[3]林立南.一种新型电池组单体电池电压检测方法[J].传感器世界,2010,16(10):18-20.
[4]张猛,姚列英,王英翘.基于CAN总线技术的PSM电源远程控制通信系统[J].核聚变与等离子体物理,2015(1):24-29.
猜你喜欢
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
车迷(2018年12期)2018-07-26 00:42:22
消费导刊(2017年19期)2017-12-13 08:30:52
中国老区建设(2016年3期)2017-01-15 13:53:26
山东工业技术(2016年15期)2016-12-01 05:31:14
电源技术(2015年11期)2015-08-22 08:50:42
学习月刊(2015年3期)2015-07-09 03:51:04
电源技术(2015年9期)2015-06-05 09:36:06
信息安全研究(2015年3期)2015-02-28 20:17:57
太空探索(2014年1期)2014-07-10 13:41:50
