机载预警雷达对海快速稳定跟踪方法∗
2016-01-15 05:09
雷达科学与技术 2016年6期
(空军装备部73分队,北京100843)
0 引言
机载预警雷达用于探测、跟踪和识别空中及海面目标,与地面雷达相比,通常机载雷达天线口径小,因此天线波束宽,难以获得较高的角度测量精度。
高速运动的空中目标位置变化快,因而雷达测角误差不会对目标航迹的稳定性产生明显的影响。然而,海面舰船类目标运动速度缓慢,若雷达测角误差较大,则在航迹跟踪时易导致对目标航向和航速判断错误。目前,常规的点迹凝聚优化算法和航迹跟踪优化算法可提高定位精度,但无法快速稳定跟踪,即便能够跟踪,舰船目标航迹的稳定性也无法保证[1-3]。
本文结合机载预警雷达处于高速运动状态和测距精度高的特点,利用距离信息构建了一种简单的交叉定位模型[4-8],可显著提升机载预警雷达的定位精度,并可应用于工程实践中。
1 交叉定位模型原理
假定机载预警雷达的一个扫描周期为5 s左右,在两个相邻扫描周期内,舰船目标移动距离通常只有二三十米。由于舰船类目标的高度近似处理为零,因而只要求解出目标在预警机惯性坐标下的位置,通过坐标变换即可得到目标的经纬度,求解出目标的具体位置。目标在预警机惯性坐标系下的位置可以利用雷达在多个不同时刻探测得到的目标距离综合处理来获得。由于舰船移动速度较慢,可认为在一个窗口内,舰船目标是固定目标。因此,可以利用各点拟合,得到较为精确的舰船位置。上述问题的数学描述如下。
假定目标静止,载机运动,只考虑运动平面的二维情形,示意图如图1所示。Y轴为正北,X轴为东,坐标原点为载机初始位置。
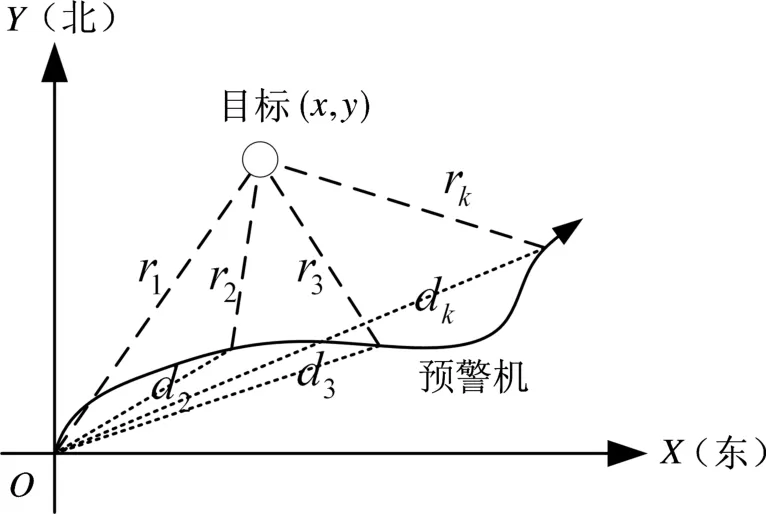
图1 观测示意图
目标位置为(x,y),预警机进行等时间间隔的k次观测,其运动状态向量为X kw=[x k,y k,v kx,v ky]T,其中x k,y k分别为第k次观测位置的X轴分量和Y轴分量;v kx,v ky分别为第k次观测时速度的X轴分量和Y轴分量;r k为对应k次观测时目标与观测站间的距离,d k为第k次观测时观测站与坐标原点的距离,r为目标与坐标原点的距离。
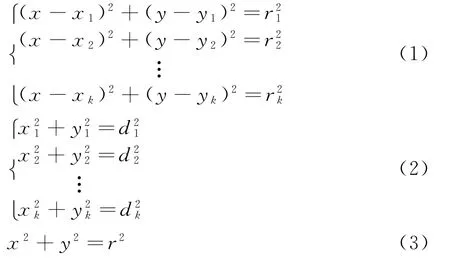
由式(1)~(3)可得


一般情况下,可假设预警机观测时近似进行匀速直线飞行,航速V w,航向K w,此时:
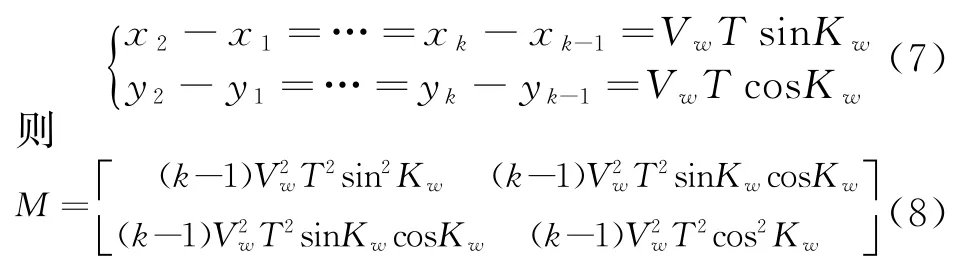
计算可得detM=0,方程组不存在唯一解。如图2所示,S k-1和S k分别为预警机在第k-1和第k次量测时的位置,航向北偏东θ,在预警机飞行方向的左右两侧有一真一假两个目标A和A′,可以通过回波接收阵面来判定真实的目标。对量测结果进行坐标转换,Y′轴指向机头方向,转移矩阵如果左阵面收到回波,则x′<0;反之x′>0。
由于距离误差的存在,k次量测交叉点不重叠,解算目标A和A′的位置参数,通过求取i(1<i<k)次观测的平均值确定目标的参数,控制目标位置估计精度和收敛速度。经过多个扫描周期时可以逐步提高定位的精度。
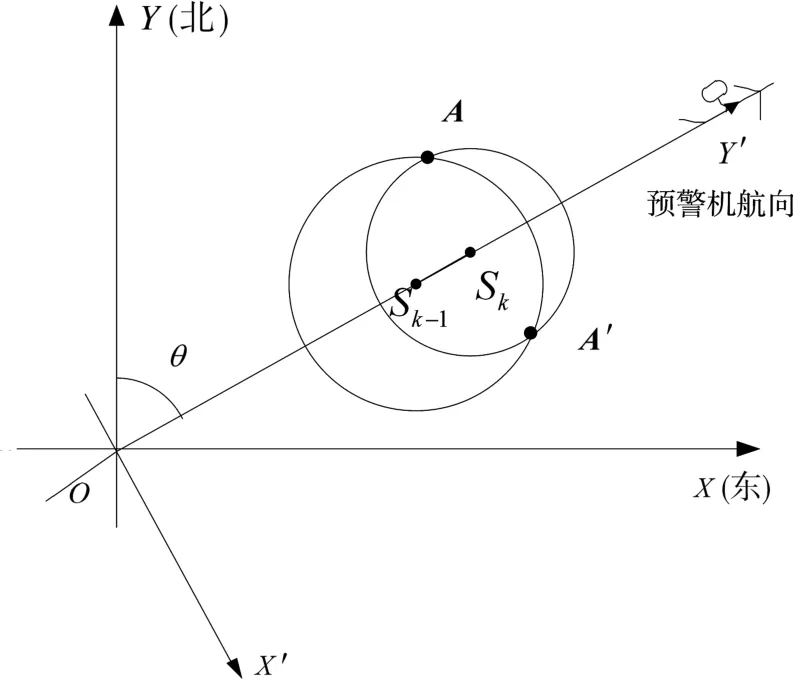
图2 运动观测站对静止目标的可观测性分析
2 交叉定位模型仿真结果
1)仿真条件
假设目标不动,其位置坐标为(180 km, 240 km),飞机作匀速直线运动,速度为220 m/s,航向为0°,雷达扫描间隔时间为5 s,进行40次量测,距离观测误差为60 m。
2)仿真结果分析
对上述运动过程进行仿真实验,其结果如图3和图4所示。进行坐标变换,将惯性坐标系转换的载机极坐标系,进行1 000次仿真实验,求得方位误差约为0.6°,与预警机的方位探测误差相当。
从图3、图4可以看出,该算法收敛速度较快,约6次观测后目标X、Y坐标的估计便可达到稳定状态且与真实值之间的误差较小,即需要大约30 s的时间即可收敛到较满意的精度。图3、图4的仿真结果表明,本文提出的交叉定位方法不仅能够满足实际工程的精度需要,而且收敛速度较快。

图3 目标X坐标的估计
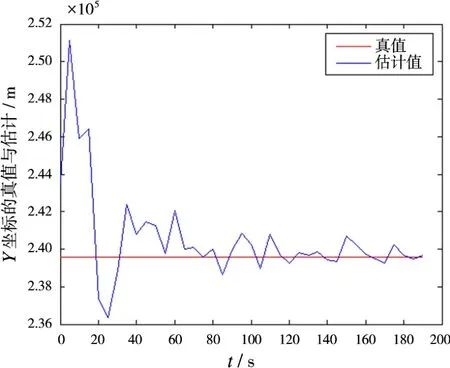
图4 目标Y坐标的估计
3 交叉定位模型实际应用
将该方法应用到某场景中,机载雷达对海面舰船目标探测,结果如图5所示。其中,X表示目标的横坐标,Y表示目标的纵坐标。图中虚线为目标的实际航迹,标注原点的实线为采用本文方法后的目标航迹,标注矩形的实线为常规方法得到的目标航迹。
从图5所示的实际探测结果可以看出,与常规方法相比,本文提出的交叉定位方法对舰船等慢速目标可以更快地达到稳定跟踪状态。
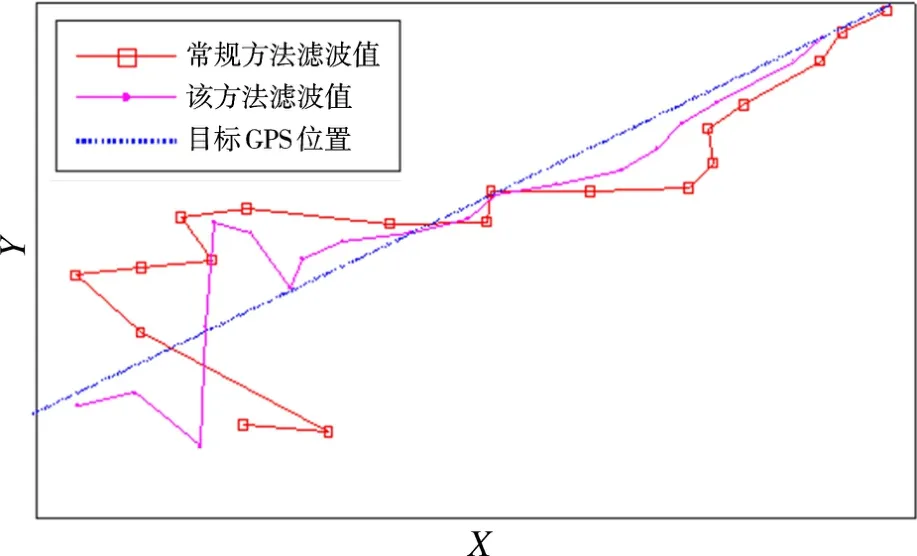
图5 对舰船目标航迹起始情况
4 结束语
针对探测海面目标时,机载预警雷达方位测量精度较低,导致在形成目标航迹时难以快速收敛的难题,本文提出了一种结合机载预警雷达距离探测精度高和预警平台运动速度快的特性,利用相邻探测时间的目标回波距离来准确定位目标方位的交叉定位方法。仿真结果和实际应用情况表明,所述方法利用较高的测距精度估算方位信息,计算快速,且不需要初值,可用于机载预警雷达在航迹跟踪起始初期快速得到较高位置精度。
[1]陆军,郦能敬,曹晨,等.预警机系统导论[M].2版.北京:国防工业出版社,2011:100-200.
[2]刘波,沈齐,李文清.空基预警探测系统[M].北京:国防工业出版社,2012:250-300.
[3]RISTIC B,ARULAMPALAM S,MCCARTY J. Target Motion Analysis Using Range-Only Measurements:Algorithms,Performance and Application to ISAR Data[J].Signal Processing,2002,82(2):273-296.
[4]梁玥,刘忠.静止目标纯距离测量下的定位原理与方法研究[J].指挥控制与仿真,2009,31(4):26-29.
[5]王璐,刘忠,夏清涛.单站航路机动对纯距离目标定位精度影响分析[J].华中科技大学学报(自然科学版), 2015,43(8):58-61.
[6]刘宏强,魏贤智,李飞,等.基于射频隐身的雷达跟踪状态下单次辐射能量实时控制方法[J].电子学报, 2015,43(10):2047-2052.
[7]李川,靳俊峰,曲成华.基于区域约束的机场场面目标跟踪[J].雷达科学与技术,2015,13(6):563-566. LI Chuan,JIN Junfeng,QU Chenghua.Surface Movement Target Tracking Based on Region Constraint[J].Radar Science and Technology,2015,13 (6):563-566.(in Chinese)
[8]许红,谢文冲,高飞,等.机载预警雷达海面多目标航迹起始算法研究[J].雷达科学与技术,2015,13(6): 655-659. XU Hong,XIE Wenchong,GAO Fei,et al.Track Initiation of Sea Surface Multi-Targets for Airborne Radar[J].Radar Science and Technology,2015,13 (6):655-659.(in Chinese)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年11期)2022-07-15
小哥白尼(军事科学)(2021年5期)2021-08-30
舰船科学技术(2021年12期)2021-03-29
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
舰船科学技术(2016年1期)2016-02-27
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
环球时报(2009-09-16)2009-09-16
小哥白尼·军事科学画报(2009年4期)2009-05-11