组网雷达反低空突防效能分析∗
2016-01-15 05:09
雷达科学与技术 2016年6期
(海军蚌埠士官学校,安徽蚌埠233032)
0 引言
空袭已成为现代高科技条件下局部战争中最常见、最有效的一种作战手段,而空袭中效率最高、突防效果最好的方式则是低空突防。资料表明,飞机以大于数马赫的速度进行高空突防时,被雷达捕获的概率为80%以上;而进行掠地或掠海突防时,被雷达捕获的概率则跌至20%以下[1]。目前加强低空突防能力已成为各国热衷于提升的领域,因而反低空突防也就成为了雷达领域中重要的研究课题。
本文在分析低空突防的优势和组网雷达反低空突防性能的基础上,建立了单部雷达对低空突防目标发现概率的数学模型和组网雷达目标融合后发现概率的数学模型,并通过实例对组网雷达反低空突防效能模型进行了论证和分析。
1 低空突防的优势分析
当目标进行低空或超低空突防时,目标周围存在地物、云雨、海浪及敌人施放的金属丝干扰等各种杂波背景,会使目标的观察变得非常困难。当目标处在杂波背景内,弱的目标容易湮没在强杂波中,特别是当强杂波使接收系统产生过载时,很难捕捉到目标;当目标不在杂波背景内时,要在成片的杂波中很快分辨出运动目标回波也不容易。低空突防的主要优势主要有地物反射干扰、地形地物遮蔽、地球曲率限制和地球多径效应等。
1.1 地物反射干扰
低空突防的目标能进行掠地或掠海飞行,探测低空目标的雷达有一部分发射能量照射到被搜索目标下面的地物上。因此,将有极其强烈的地物回波伴随目标回波一起进入雷达接收机,使目标湮没在地物回波之中。
低空突防目标在固定地物回波中的可见度是通过杂波内的可见度(SCV)来衡量的,它规定了同时存在的固定物体信号的能量可以比要计算的飞机目标能量强多少时仍然能够看见飞机[2]。SCV定义为在给定检测概率和虚警概率条件下,检测到重叠于杂波上的运动目标时,杂波功率和目标回波功率的比值。例如,杂波中可见度为20 dB时,说明在杂波比目标回波强20 d B的情况下,雷达可以检测出杂波中运动的目标。杂波中可见度与改善因子I的关系为

式中,V0为可见度系数。
通常情况下杂波可见度为25~35 dB,但实际中SCV需达60 dB以上才能够清楚地分辨出活动目标,因此地物反射能较好地给低空突防目标“隐身”。
1.2 地形地物遮蔽
高山、海岛、森林、建筑物等会对雷达发射的电磁波造成屏蔽,导致地物干扰和盲区的形成,低空目标的探测距离受地形、地物造成的雷达天线遮蔽角的影响很大。雷达的探测距离R与遮蔽角α和目标飞行高度H的关系[3]可以表示为

式中,R0为地球半径,可取6 370 km,若考虑正常折射,应取8 500 km。
将上式变换为简化二次方程:

解方程,可得探测距离与遮蔽角α的关系为

根据上式,计算了不同飞行高度和遮蔽角下的雷达探测距离,如表1所示。

表1 不同遮蔽角与飞行高度下的雷达探测距离 km
由于电磁波在大气层中会发生折射,所以对低空目标的探测距离比表1中所列出的探测距离有所增大。但是可以很明显地看出,目标飞行高度越低,雷达发现距离越小;而遮蔽角越大,雷达的发现距离显著地下降。因此地形地物遮蔽能有效地降低低空突防目标的发现概率。
1.3 地球曲率限制
由于地球曲率的限制,直线传播的雷达电磁波只能在一定的视距范围内发现目标,雷达通常只能观察到视距内的目标,而提高雷达天线的高度可以扩展视距。设雷达视距为R′,目标飞行高度为H,雷达天线高度为h,大气层正常折射,则三者之间的关系[4]表示为

表2列出了天线高度为20 m的情况下,不同低空目标所相应的雷达视距。
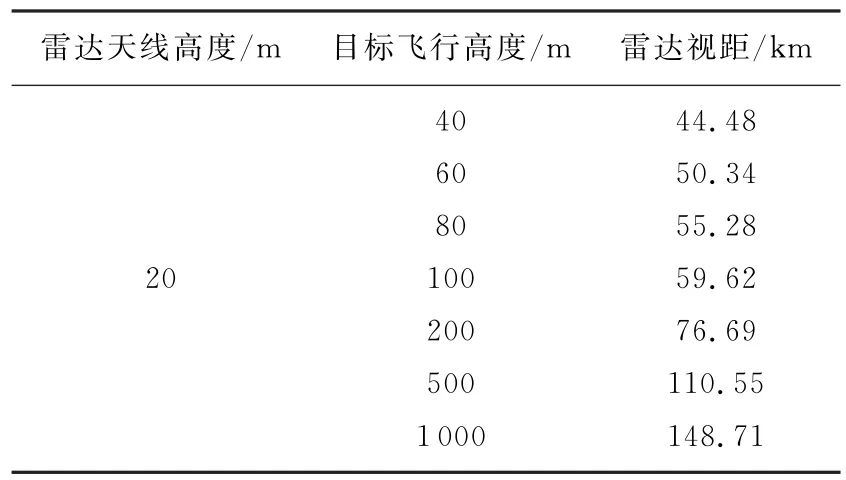
表2 雷达视距
由表2可以看出,随着目标飞行高度的降低,雷达视距也下降明显,当目标进行低空突防时,特别是100 m以下的低空、超低空目标,雷达作用距离下降,发现概率显著降低。
1.4 地球多径效应
当雷达跟踪超低空飞行目标时,除目标直接反射的回波外,经地面或海面反射的多路径信号也从天线主瓣进入接收机。镜面反射分量和散射分量构成了多路径信号,它对雷达的低角跟踪影响很严重,甚至能使雷达丢失目标。当雷达对低空突防目标进行搜索跟踪时,由于多径效应的影响,可能产生镜像回波和目标回波相互干涉的现象,使得雷达所接收到的回波变强或者变弱[5]。
2 组网雷达反低空突防性能分析
面临低空突防的挑战,组网雷达综合集成了低空补盲雷达、空中预警机或气球载雷达、多基地雷达来应对。同时发展数据融合技术、杂波抑制技术、综合布站技术,集多种反低空措施于一体,具备较好的捕获低空目标的能力。
2.1 低空补盲雷达能有效延长低空目标预警时间
在雷达网中,低空补盲雷达可为固定站或车载站,车载站具有机动性高、组网灵活的特点,通常部署于雷达网最前沿,超前沿的部署可以大大地增加对低空目标的预警时间。低空补盲雷达一般采用频率分集、脉冲压缩和脉冲多普勒等新体制,天线采取余割双波束或余割平方波束,使得低空补盲的SCV可以高达35~60 d B[6],能有效地提高低空目标的发现概率。
2.2 空基雷达能克服地球曲率影响
升高雷达平台可以有效地克服地球曲率的限制对雷达探测距离的限制,在组网雷达中,空中预警机、气球载雷达、星载雷达天线位置很高,对低空目标的直视距离可达400~600 km,因此基本上不影响对低空目标的发现,使得组网雷达反低空突防具备了先决条件[7]。此外,空基雷达对低空目标属于俯视照射,反射截面积较大的一面暴露在雷达视野内,RCS相对增大,有效地增加了对低空目标的发现概率。
2.3 数据融合技术能增强反低空性能
组网雷达一般由雷达传感器、通信链路和数据融合中心三部分组成,雷达网通常由多部不同类型的雷达组成,各雷达之间通过数据链路将各雷达获得的情报融合。数据融合技术能够改善和提高雷达系统的跟踪精度和可靠性。针对低空目标来说,虽然各雷达具有不同的性能参数,但将所有雷达捕获的信息传送至数据融合中心处理之后,组网雷达的反低空突防能力将得到改善。由于数据融合中心得出的目标信息将比任何一部单站雷达捕获的信息更加真实和精确,因此数据融合技术使得组网雷达的反低空性能得到了显著的提升。
2.4 杂波抑制技术改善反低空性能
由于低空突防的目标能进行掠地或掠海飞行,强烈的杂波将同目标一起被雷达天线接收,极大地影响了目标的发现概率。为了应对低空突防目标的威胁,亟需提高雷达杂波背景下的目标检测能力。组网雷达一般采用动目标显示、动目标检测和脉冲多普勒等技术体制,由于不同的运动速度将引起不同的多普勒频移,可以从频率上滤除大部分杂波;同时在MTI和MTD中使用各种滤波器,可在杂波中提取弱目标,有效地提高了雷达抗强杂波的能力。
3 组网雷达反低空突防效能模型
3.1 单部雷达对低空目标的发现概率
组网雷达集多种反低空措施于一体,能在强杂波背景下及早捕获低空目标,即为反低空突防成功。首先探讨低空目标的主要杂波情况。
1)机载雷达地杂波

机载雷达探测目标时主瓣杂波和旁瓣杂波是主要的地杂波来源[8],假设地面杂波单元的雷达截面积已知,根据雷达方程可知,在距离R处的一个距离门τ内总的主瓣杂波功率Pmlc为式中,Pt为发射功率,λ为雷达工作波长,γ为极化损耗,Gml为天线主瓣增益,H为雷达平台高度,θ3dB为方位波束宽度,R为杂波区中心距离,c为光速,Lc为系统对杂波总损耗因子。
而旁瓣杂波功率Pslc为

式中,Gst为旁瓣平均增益电平。
因此,机载雷达的地杂波总功率Pc为

2)舰载雷达海杂波
海杂波是一个随机变化过程,无法用确定的功率模型来进行计算。海杂波功率取决于雷达频率、极化方式、擦地角等,同时与当时的风向、风速、浪涌等因素有关。目前对海杂波描述的常用模型有瑞利分布、对数正态分布、韦布尔分布、K分布等。韦布尔分布能在很宽的条件范围内较好地描述海杂波,其分布函数[9]为

式中,σc为海杂波的幅度,α为韦布尔分布的偏斜度,σm为σc的均值,表示韦布尔分布的中位数。
3)地面雷达地杂波
当地面雷达以擦地角照射地面时,方位波束宽度决定了照射面积的宽度,雷达脉冲宽度和仰角波束宽度决定了它沿距离方向的长度。在距离R处一个距离门τ内总的地面雷达的杂波功率Pc计算式为

式中,Pt为发射功率,G为天线主瓣增益,σ0为杂波单位面积的雷达截面积,Ac为天线有效孔径,φ为擦地角,θ3dB为方位波束宽度,c为光速,R为杂波区中心距离,Lr为系统对杂波总损耗因子。
4)单部雷达对低空目标的发现概率
建立了地(海)杂波功率模型后,则单部警戒雷达对低空目标的发现概率Pd[10]为

式中,S/N为单个脉冲的信噪比,n为1次扫描中脉冲的积累数。
3.2 组网雷达对低空目标融合发现概率
组网雷达通常由多部雷达按一定的分布规则综合布局而成,每部雷达由于体制不同对微弱信号的检测能力、对低空目标的捕获能力不同,因此在雷达网内,必须按照某种统计检测规律对各雷达的信息进行融合。
假设某雷达网有N部雷达,各雷达独立搜索目标,对目标的融合发现概率采用秩K融合规则,当雷达网内探测到目标的雷达数量大于检测门限K时,即判定为发现目标。融合判决流程如图1所示。
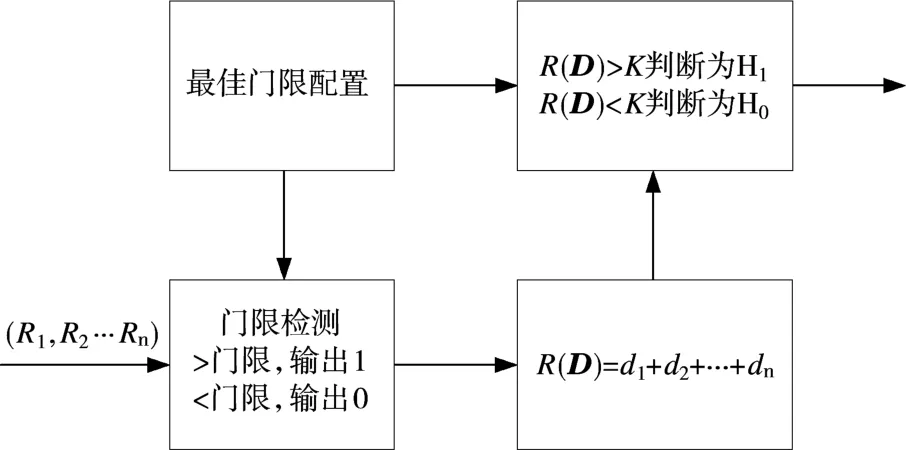
图1 融合判决流程
二元假设:H1为目标出现,H0为目标不出现。
二种判决:D1为选择假设H1,D0为选择假设H0。
假设N部雷达之间互不相关,第n部雷达的检测概率为Pdn=P(D1/H1),虚警概率为Pfn= P(D1/H0),则判定矢量D=(d1,d2,…,d N)。
每部雷达对低空目标作出“0”或“1”的硬判决d n:

各雷达判决的结果通过通信网络送到组网中心进行数据融合,数据融合对接收到的各雷达的判定矢量进行全局判定,则D有2N种可能,
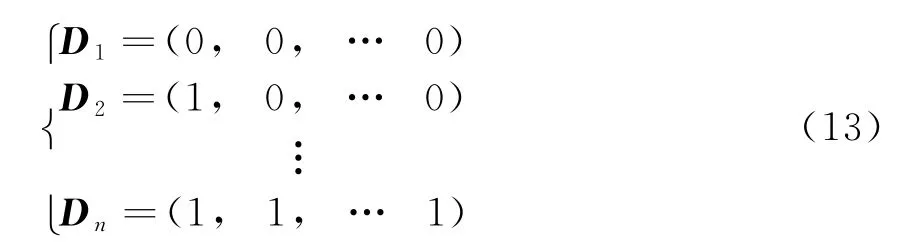
假设数据融合采用并行融合结构,融合判定规则表示为

则雷达信息融合后的总发现概率P D可表示为

式中,D为判决空间,D0表示判决为H0的雷达集合,D1表示判决为H1的雷达集合。
假设雷达网由3部雷达组成,各雷达虚警概率均为10-5,检测概率均为0.9,对秩K融合规则的典型值计算结果如表3所示。
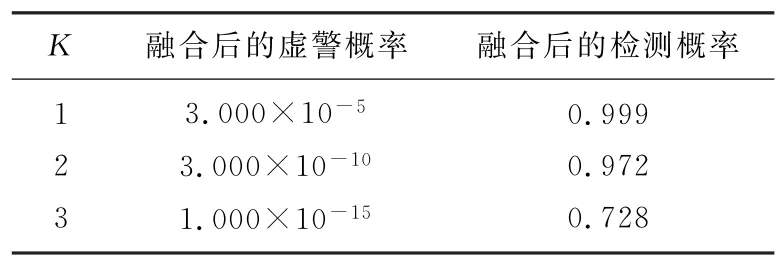
表3 组网雷达秩K融合规则性能比较
从表3可以看出,当K为1时,虚警概率太大,导致误报率提高;当K为3时,检测概率太小,可能导致目标丢失。综合考虑,K取值为2时作战效能最佳[11]。
3.3 组网雷达反低空突防实例
假设理想情况下,某雷达网由4部雷达组成,每部雷达的虚警概率Pfn均为10-5,发现概率Pdn均为0.75,秩K取2。可选雷达的性能参数如表4所示。
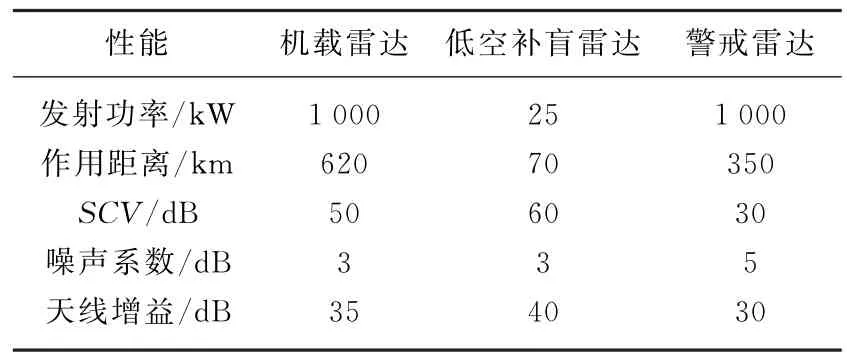
表4 各雷达性能参数
若敌方目标以100 m高度、500 m/s速度进行低空突防,组网雷达进行反低空突防部署,要求及早捕获目标。现有两种布站方案。
方案1是由1架机载预警雷达、2部地面中远程警戒雷达和1部低空补盲雷达组成,如图2所示。
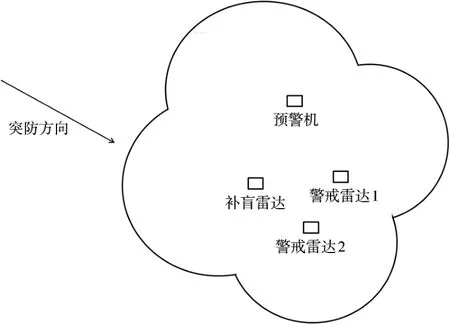
图2 方案1示意图
方案2是由3部地面中远程警戒雷达和1部低空补盲雷达组成,如图3所示。
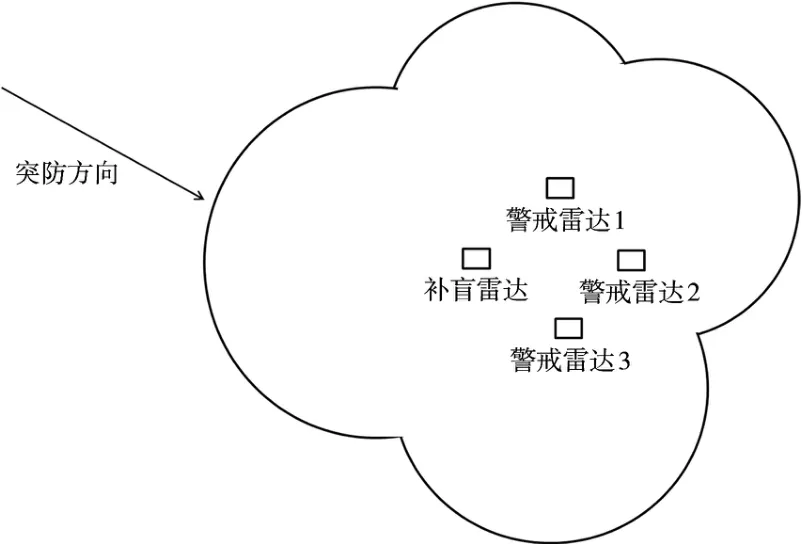
图3 方案2示意图
根据上述分析,对两种布站方式在相同的外部条件和低空突防路线下的反低空突防效能进行计算,得出目标数据融合后的发现概率和预警时间如表5所示。

表5 两种布站方式下的预警时间及发现概率
从仿真结果可以看出:
1)组网雷达比单部雷达的发现概率及预警时间有明显改善,因为组网雷达集成了多部雷达信息,且各雷达有自己的独特优势。
2)方案1的预警时间明显长于方案2,虽然两种方案都配备了低空补盲雷达,但方案1配备了机载预警雷达,机载预警雷达具有较高的天线高度,能打破地球曲率的限制,使得低空探测距离大大增加,因而使预警时间得到了延长。
3)方案1的反低空突防效能优于方案2的反低空突防效能。因为方案1中的机载预警雷达具有较大的SCV,且能与低空补盲雷达有效配合,在探测中受地面或海面杂波影响较小。
4)说明选择不同的雷达及不同的布站方式能取得不同的反低空突防效果。
4 结束语
反低空突防是目前防空系统面临的一个重大难题,组网雷达在反低空突防中有着独特的优势。本文首先分析了低空突防与其他空袭行动相比所独有的优势,然后分析了针对低空突防组网雷达具有的战技措施,并建立了相应的数学模型来衡量组网雷达的反低空作战效能模型。通过仿真实例,验证了组网雷达比单部雷达的发现概率及预警时间有明显改善,且组网雷达中,选用不同的雷达组合,采取不同的布站方式,能取得不同的反低空突防效果。针对不同的来袭目标,不同的来袭路线,采取不同的雷达配置方式和布站方式,以确保取得最佳的反低空突防性能,这是下一步研究的方向。
[1]陈振邦.低空防御与低空补盲雷达的发展[J].现代防御技术,1997(3):16-23.
[2]尹以新,何明浩,马晓岩.雷达组网ECCM性能评估方法[J].系统工程与电子技术,2000,22(11):53-55.
[3]赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,1999:20-31.
[4]张远,方青,曲成华.基于遗传算法的组网雷达优化部署[J].雷达科学与技术,2014,12(1):76-80. ZHANG Yuan,FANG Qing,QU Chenghua.Optimal Deployment of Netting Radars Based on Genetic Algorithm[J].Radar Science and Technology,2014,12(1):76-80.(in Chinese)
[5]吴聪,王红,李剑斌.多径效应对低慢小目标探测影响分析[J].雷达与对抗,2013,33(3):15-17.
[6]李圣衍,郭波,侯燕.几种典型的组网雷达干扰方式效能分析[J].舰船电子对抗,2015,38(5):77-79.
[7]李正勇,严颂华,刘志忠,等.天地波组网雷达同步控制系统设计[J].雷达科学与技术,2014,12(5):473-478. LI Zhengyong,YAN Songhua,LIU Zhizhong,et al. Synchronous Control System Design of H ybrid Sky-Surface Wave Radar Network[J].Radar Science and Technology,2014,12(5):473-478.(in Chinese)
[8]TUNUNALA M.Radar Network Interference Equation Study[J].Proc of IEEE NAEXON,1996,9(3): 20-23.
[9]谢永亮,赵朋亮,甘怀锦.雷达模拟器中海杂波模拟的一种新方法[J].微型机与应用,2011,30(3): 67-69.
[10]陈永光,李修和,沈阳.组网雷达作战能力分析与评估[M].北京:国防工业出版社,2006:143-151.
[11]王国良,申绪涧,汪连栋,等.基于秩K融合规则的组网雷达系统干扰效果评估[J].系统仿真学报,2009, 21(23):7678-7680.
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
科学与信息化(2021年30期)2021-12-24
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
军民两用技术与产品(2021年10期)2021-03-16
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
雷达与对抗(2020年1期)2020-06-05
北京航空航天大学学报(2017年9期)2017-12-18