光电层合简支板的多模态最优模糊主动振动控制
2016-01-12 10:43贺容波,郑世杰
振动与冲击 2015年8期
第一作者贺容波男,博士生,讲师,1979年生
通信作者郑世杰男,教授,博士生导师,1968年生
光电层合简支板的多模态最优模糊主动振动控制
贺容波1,2,郑世杰1
(1.南京航空航天大学机械结构力学及控制国家重点实验室,南京210016;2. 安徽工业大学电气与信息工程学院,安徽马鞍山243002)
摘要:以配置两对光致伸缩驱动器的简支板为控制对象,提出了最优控制与模糊控制相结合的最优模糊主动控制算法。考虑到光致伸缩驱动器的非线性驱动特性,首先由最优控制获得光电层合简支板多模态振动的期望控制量, 再通过模糊控制器使光致伸缩驱动器光致应变逼近该控制量, 从而实现对简支板的多模态振动控制。在最优模糊控制器设计过程中,模糊控制的设计与最优控制设计是相互独立的。仿真结果表明, 最优模糊控制能够有效实现光电层合简支板的多模态振动抑制,控制效果明显优于直接最优状态反馈控制。
关键词:光致伸缩驱动器;简支板;多模态振动;模糊控制;最优控制
基金项目:国家自然科学基金面上项目(11172129);中国航空科学
收稿日期:2014-01-20修改稿收到日期:2014-04-25
中图分类号:O328;V214.3文献标志码:A
Multi-modal optimal fuzzy active vibration control of aphoto-electric laminated simply supported plate
HERong-bo1,2,ZHENGShi-jie1(1.State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics And Astronautics, Nanjing 210016, China; 2. School of Electrical and Information Engineering, Anhui University of Technology, Maanshan 243002, China)
Abstract:Here, a simply supported plate laminated with two pairs of photostrictive actuators was taken as a controlled object, an optimal fuzzy active vibration control algorithm was proposed on the basis of the combination of optimal control and fuzzy one. Considering the nonlinear driving characteristics of photostrictive actuators, the expectation control for suppressing multi-modal vibration of the photo-electric laminated simply supported plate was firstly obtained through the optimal control. Then, the fuzzy control was used to make the strains induced by photostrictive actuators approach the expectation control. Thus, the multi-modal vibration control of the simply supported plate was realized. In the design process of optimal fuzzy controllers, the design of fuzzy control was independent on the design of optimal control. The simulation results demonstrated that the proposed control method can effectively realize the multi-modal vibration control of the photo-electric laminated simply supported plate, and the control effect of the optimal fuzzy control is better than that of the optimal state feedback control.
Key words:photostrictive actuators; simply supported plates; multi-modal vibration; fuzzy control; optimal control
新型的铁电陶瓷材料PLZT在光电效应和逆压电效应的共同作用下会产生光致伸缩效应,即在特定波长的高能光束均匀照射铁电体表面时会在极化方向上产生应变,是一种理想的非接触式遥控驱动器,在柔性结构的主动振动控制方面具有可观的发展前景[1]。近年来,国内外的一些学者为此进行了一系列的基础性研究:Tzou等[1]首次提出二维分布式多自由度光致伸缩驱动器模型,并对其参数进行了研究分析;Liu等[2]率先将0-1极化的二维平面PLZT驱动器应用到矩形板结构振动控制;Shih等[3,4]将分布式PLZT驱动器分别应用于圆柱壳和矩形板的振动控制中,利用模态控制因子研究了驱动器在不同布局下对两类结构低阶模态的控制效果;Shih等[5-6]又分别对PLZT驱动器在半球壳和抛物壳振动控制中的空间布局优化提出了建设性意见;Sun等[7-8]则将光致伸缩驱动器用于悬臂梁振动的无线控制研究;姜晶等[9]研究了将多自由度PLZT驱动器层合于正方形板及矩形板的模态控制效果;王新杰[10]将PLZT驱动器层合到开口球壳及抛物壳等柔性壳结构表面,对PLZT驱动器模态控制力中的弯曲效应和薄膜效应进行了分析比较,并结合常光强控制和速度反馈控制进行了主动控制仿真;陈德金等[11-12]利用遗传算法对用于简支板振动控制的单对、双对光致伸缩驱动器布局进行优化,同时设计了基于遗传算法优化权值矩阵的LQR最优无线主动控制算法。贺容波等[13]设计了模糊变结构主动控制器,对光照方向最优切换面进行讨论,实现了对光电层合简直板的单模态主动振动控制,丰富了光电层合智能结构主动控制的算法。
然而,现有的研究内容[1-13]主要偏重于驱动器位置对模态控制因子的影响分析及单模态振动主动控制算法研究,对于多模态振动控制器设计的相关研究至今未见报道。事实上,多模态振动抑制比单一模态的振动抑制更贴近实际工程情况,因此开展多模态振动主动控制算法研究是非常必要的。在采用光致伸缩驱动器的多模态振动主动控制中,由于光致驱动器复杂的非线性驱动特性,如何使光致驱动器产生抑制多模态振动所需的控制力是需要解决的关键的问题。为此,本文以层合两对光致伸缩驱动器的简支板为控制对象,提出了一种将最优控制与模糊控制方法相结合的最优模糊控制策略[14-15]。该方法是一种基于模糊控制的两步设计思路,即:先由LQR控制提供期望的控制量,再由模糊控制器确定光致伸缩驱动器光照方向与光强,使其实际的控制力逼近期望的控制量。最后通过数值仿真对这一策略的有效性进行了验证。
1光电层合板系统的状态方程与光致驱动特性
在这一节将建立层合两对光致伸缩驱动器的四边简支板的多模态振动状态方程,并对光致驱动特性进行简要分析。如图1所示,在板的上下表面对称层合了四片光致伸缩驱动器贴片,片1和片2的极化方向分别沿x向和y向,以便于实现对板的多模态振动抑制[4,11,13]。设简支板的平面坐标系为(x,y),驱动器贴片1和2在板的位置分布由边界坐标x1、x2、y1、y2和x3、x4、y3、y4确定;由文献[4,11,13],光电层合板的mn阶模态振动控制方程可表述为:
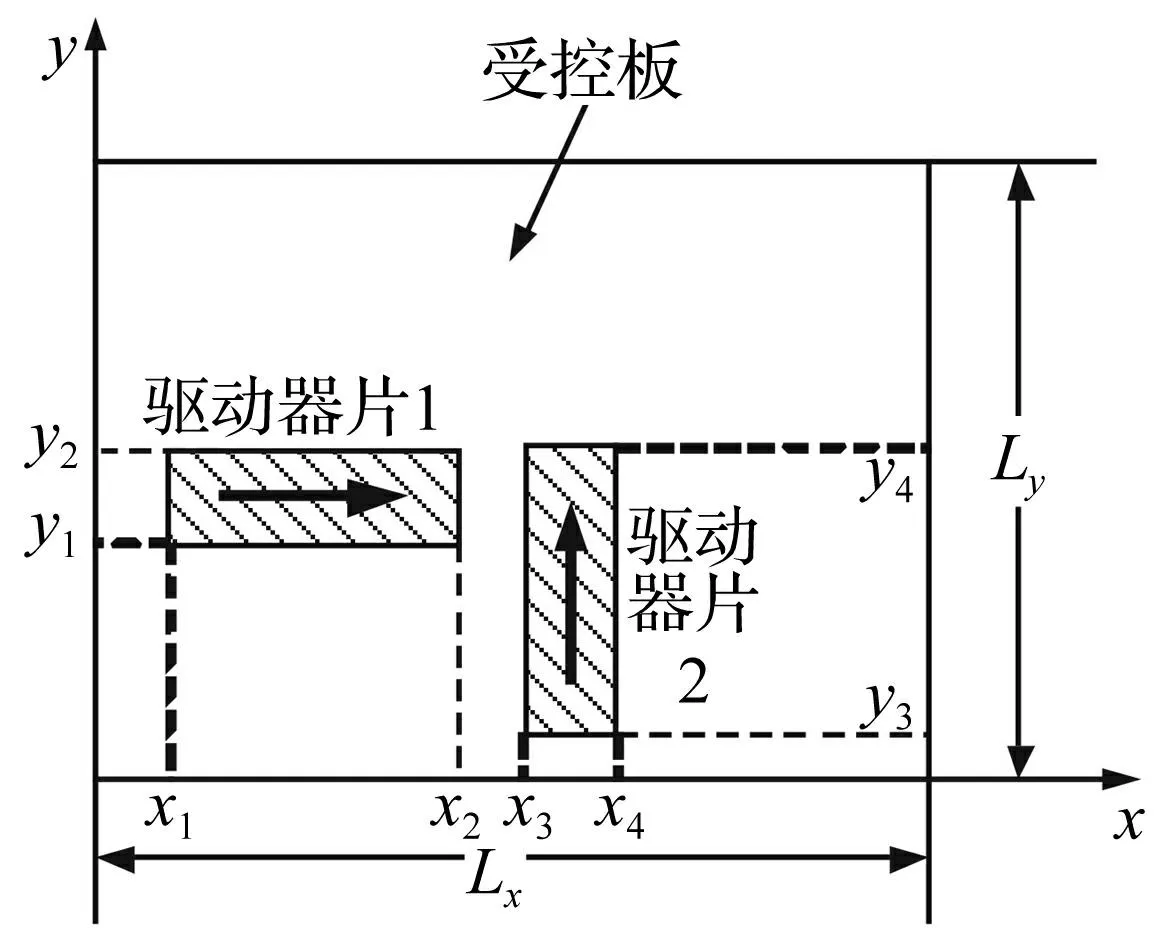
图1 光电层合板示意图 Fig.1 Plate with surface-bonded actuators
m=1,2,…n=1,2,…
(1)

(2)

(3a)
(3b)
式中Ya为驱动器的杨氏模量,ha为驱动器的厚度,h为板的厚度,LxLy分别为板的x向和y向的长度,Y为板的杨氏模量;ρ为板的密度。
板的固有频率(单位为:rad/s)可由下式确定[4, 11,13]:
(4)

(5)
式中,El(t)为光生电场,θ(t)为光致温度,可分别表示为:
El(tj)=El(tj-1)+[Es-El(tj-1)]×
(6)
θ(tj)=θ(tj-1)+
{[I(tj)P-γθ(tj-1)]Δt}/(H+γΔt)
(7)
在式(5)~式(7)中,Ya=6.3×1010N/m2为光致伸缩驱动器杨氏模量,d33=1.79×10-10m/V为压电应变系数,λ=6.808 6×104N/m2℃为应力-温度系数,Pn=0.25×10-4C/ m2℃为热释电常数,ε=1.65×10-8F/m为介电常数,Es=2.43×105V/m为饱和光电场强度,α=2.772×10-3m2/(ws)为光致伸缩驱动器系数,β=0.01 V/s为电压泄漏系数,P=0.23×103cm2/s 为光生热能,γ=0.915 w/℃s为热交换系数,H=16 w/℃为光致伸缩驱动器热容,αs=a/b为驱动器长宽比,Δt为时间间隔,I(tj)为tj时刻的光强。
(8)
式中,u为控制信号,sgn(·)为符号函数;当u>0时,sgn(u)=+1;当u<0时,sgn(u)=-1;当u=0时,sgn(u)=0;在文中,为了分析的方便,假定光照方向变化的时候驱动器的应变和电场能够立即消失[2, 4, 11,13]。
选取前3阶模态为受控模态,为便于分析,将前3阶模态控制方程(1)写成状态空间的形式:

(9)
状态方程中的向量和矩阵如下:
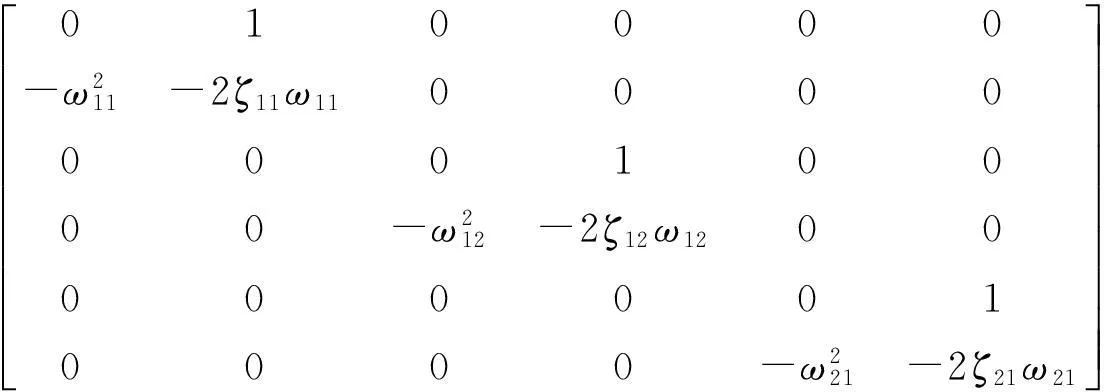
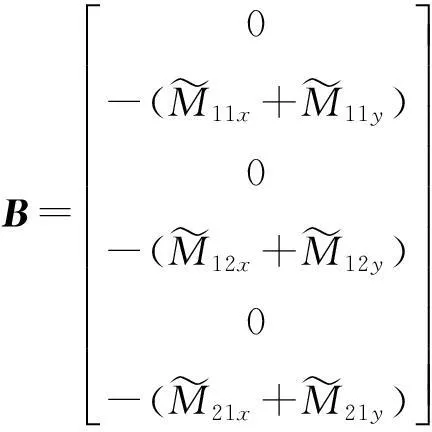
C=I6×6
为了实现多模态振动抑制,必须对光照方向和光照强度两个方面精心设计。

图2 光致应变S的在不同光照强度下时间响应曲线 Fig.2 Time history of photo-induced strain S> under the different light intensity
(10)
式(10)为简单的线性定常系统,依据现代控制理论可以很容易设计最优控制律实现对该系统的多模态最优主动控制。进一步,针对实际的光电层合简支板系统,若光致伸缩驱动器能够跟踪这一最优控制律,就能够实现对简支板的多模态最优振动控制。由于模糊控制具有良好的鲁棒性,能够处理不确定性因素,不需要对系统进行精确建模,因此本文通过该方法实现光致驱动器对最优控制律的跟踪控制,来实现光电层合简支板的多模态振动抑制。
2最优模糊主动控制器设计

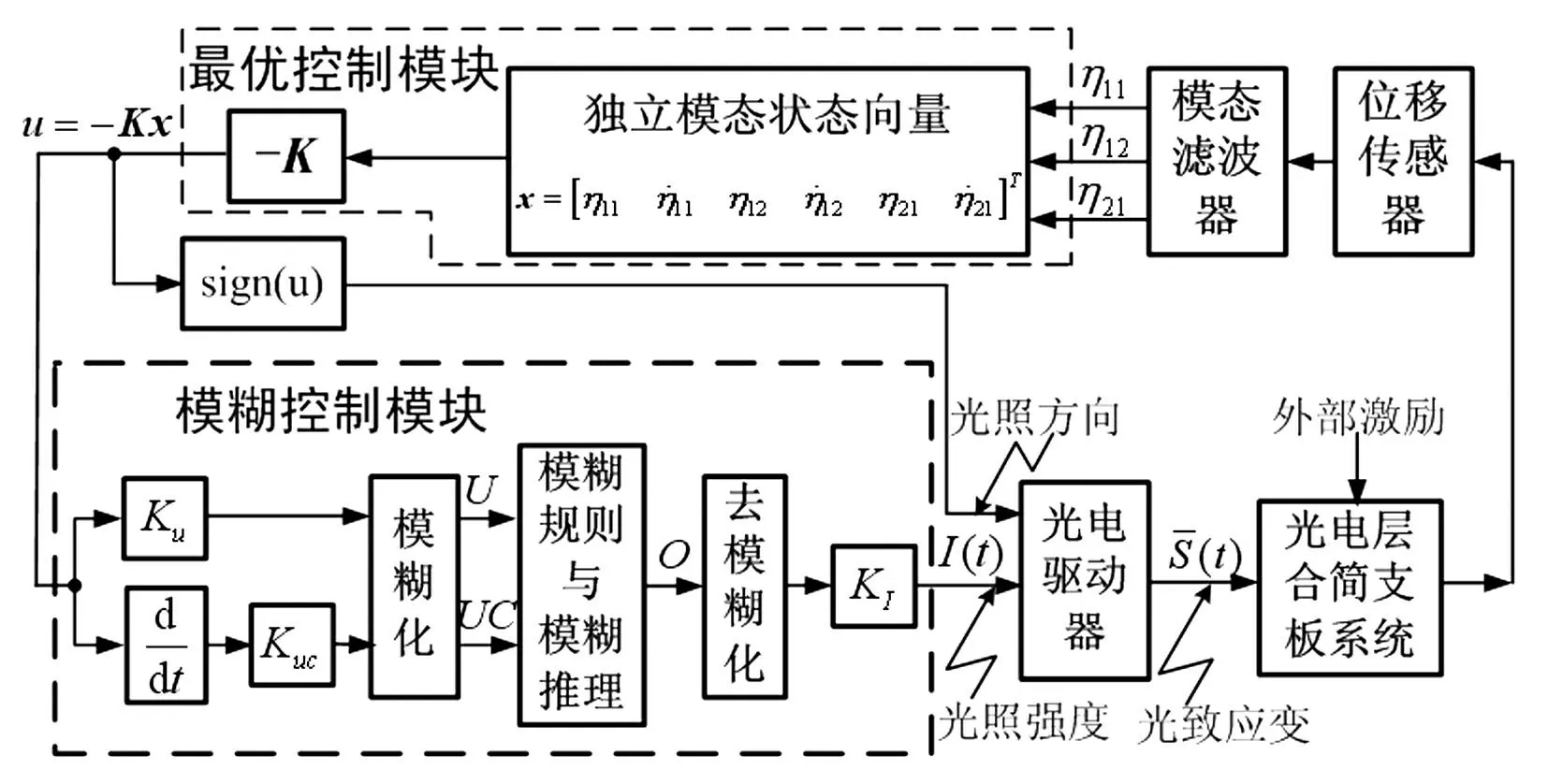
图3 光电层合简支板最优模糊主动振动控制系统 Fig.3 Optimal fuzzy active vibration control system of photo-electric laminated simply supported plates
2.1 线性二次最优控制器设计 [14-15]
不失一般性,考虑二次型性能指标为
(11)
式中:Q和R分别为对状态变量和输入变量的权值矩阵和权值系数,且Q为半正定矩阵,R>0。
二次型最优控制问题就是对式(10)描述的线性定常系统,确定最优控制u*使得二次型性能指标J最小。应用极小值原理,可以得出最优控制作用:
(12)
式中K为状态反馈增益矩阵,P为代数Riccati方程
PA+ATP-PBR-1BTP+Q=0
(13)
将式(12)代入式(10),可得闭环系统的状态方程为
(14)
(15)
式中α<χi<β,α、β为正实数,可见Q满足半正定条件,具体数值可以根据实际响应曲线经过反复调整后确定。
2.2 模糊控制器设计

(1)模糊控制器的结构及隶属度函数选择
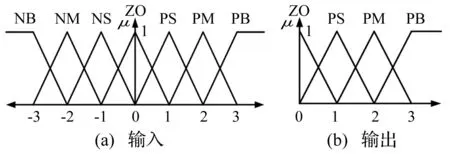
图4 隶属函数曲线 Fig.4 Membership functions of the inputs and output
采用通用的二维模糊控制器结构,如图3所示。模糊控制器输入为U及其变化率UC,输出为光照强度。光照方向根据最优控制律的符号变化而变化。精确输入量u和uc需要分别乘以量化因子Ku和Kuc转换到各自的论域范围。这里设定模糊控制器的输入量标准论域皆为[-3, 3]。将输入量论域划分成“负大”,“负中”,“负小”,“零”,“正小”,“正中”,“正大”7 个模糊子集,即{NL,NM,NS,ZO,PS,PM,PL}。输出量由于是光强,光强不能为负,因此设定输出量标准论域为[0,3],将输出量论域划分成“零”,“正小”,“正中”,“正大”4个模糊子集,即{ZO,PS,PM,PB}。各模糊子集的隶属函数采用三角隶属度函数,函数曲线如图4所示。
(2)模糊控制规则的建立
模糊控制器设计目的是使光电驱动器产生的实际控制量逼近最优状态反馈,其控制输出为光强。对光致驱动器而言,外部光照强度越大,光致应变增长越快,反之,则越慢;另外,光致驱动器与压电驱动器不同,其应变只能单向增加,不能减小[16-17]。基于上述光电驱动器的驱动特性,因此模糊控制规则的建立要遵循以下两条原则:①当输入U为正的较大值且其变化率UC也为正值的时候,输出光强应为较大的正值,以尽快逼近最优控制律u;②当输入U为正的较大值但其变化率UC为负值的时候,输出光强应为较小的正值或为“0”。由于系统具有对称性,只考虑正向输入时的控制规则,反向输入时的控制规则依据对称性即可求得。以此总结的得出的模糊控制规则如表1。由于U和UC分别定义为7个模糊子集,因此共有49条规则。
(3)模糊控制器查询表
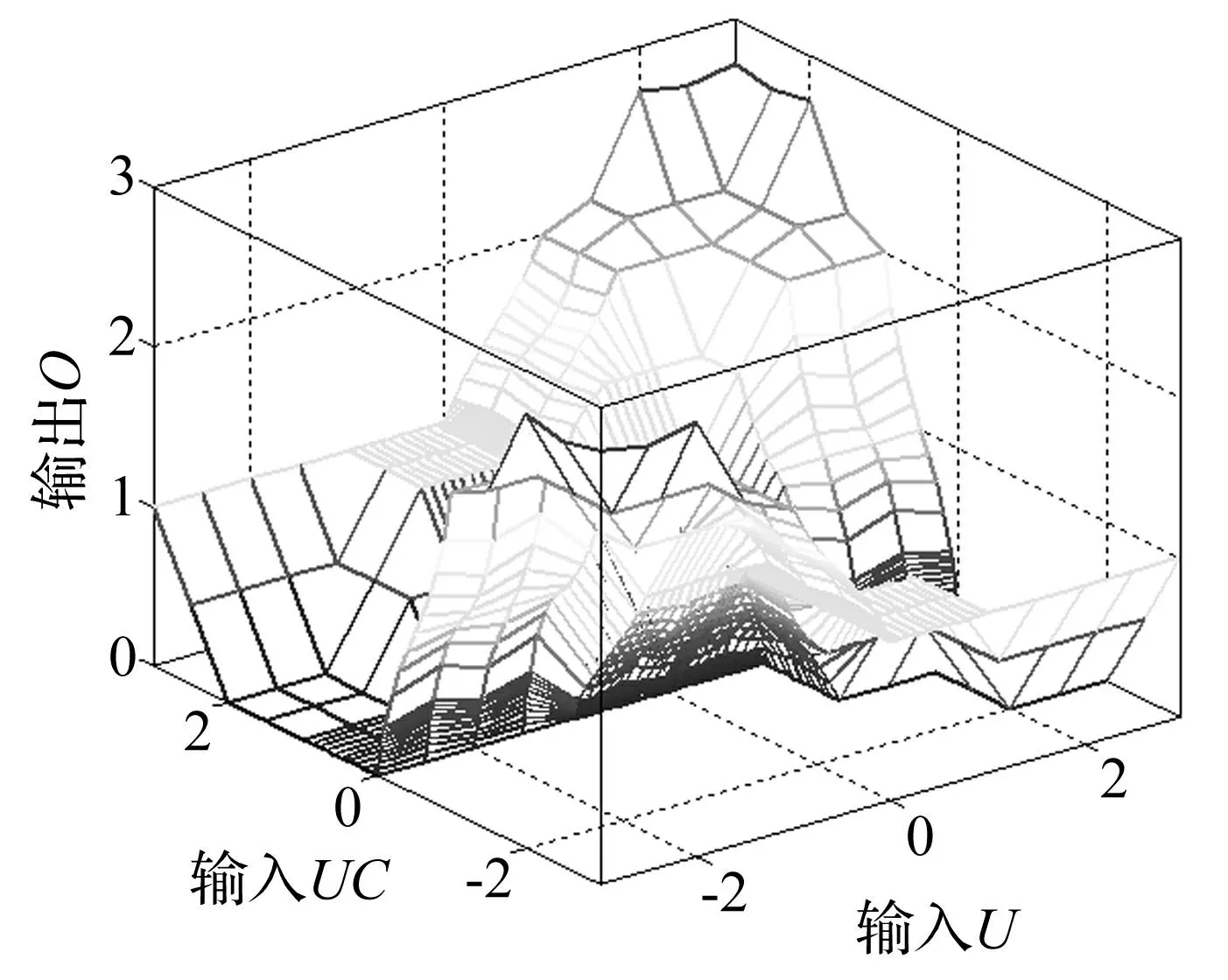
图5 控制面 Fig.5 The control surface
模糊控制器的推理算法采用Mamdani方法,去模糊化则采用精度较高的重心法。同时,将输入论域U和UC各离散化成包含47个点离散论域,根据以上控制规则、模糊推理和去模糊化方法,可通过程序离线计算得到所有情况下模糊控制器输出,将所有情况下的输入输出组合起来就可以构成所谓的模糊控制器查询表。此查询表可以事先存放于计算机中,每一个控制周期中,计算机将所采集到的最优控制律u和其变化率uc转换到各自的离散论域中,由此表查到相应的控制输出值O,再乘以量化因子KI便得到光强控制信号I。这里,由于查询表数据太多,不便于给出,因此用图5所示的包含有472个点的非线性控制面表示。
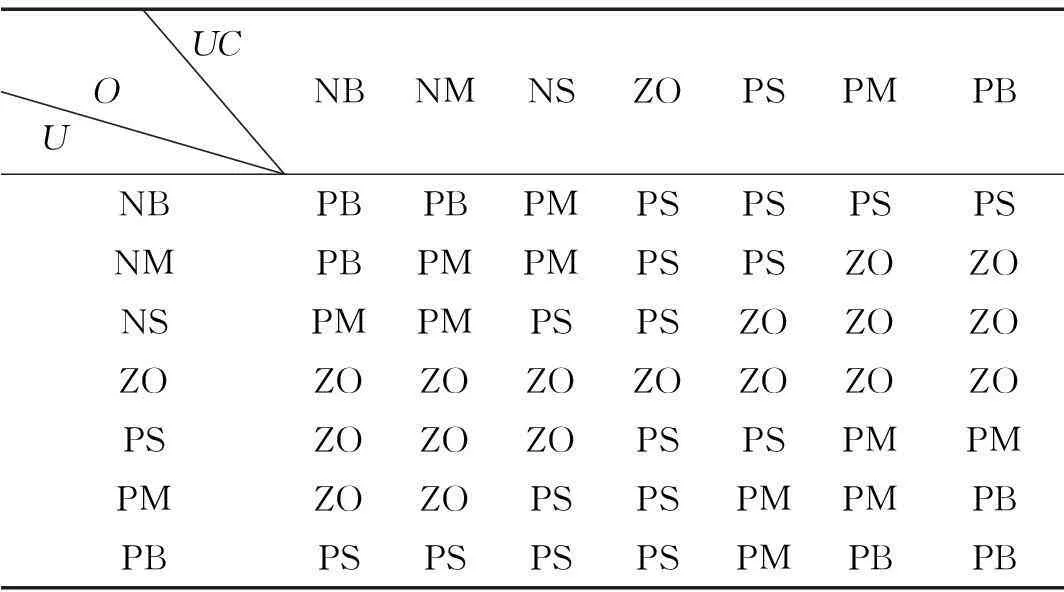
表1 模糊控制规则表
3数值仿真研究
以光电层合简支板为仿真对象,验证前述控制策略的有效性。取受控板的尺寸参数为[11]:长Lx=0.8 m,宽Ly=0.6 m,高h=0.001 m;材料属性为:Y=2.1×1011N/m2,ρ=7.8×103kg/m3,μ=0.3;在板的上下表面对称粘贴两对光致伸缩驱动器贴片,其尺寸均为0.24 m×0.06 m×0.000 4 m,光电驱动器片在板的位置分布取为文献[11]遗传优化位置:x1=0.05 m,x2=0.29 m,y1=0.24 m,y2=0.3 m和x3=0.34 m,x4=0.4m,y3=0.06 m,y4=0.3 m。根据式(4)和式(3a)、(3b)计算得到简支板的前三阶受控模态频率和模态控制因子分别为:
(16a)
(16b)
(16c)
为了便于分析,设各阶模态初始位移均取为0.001 m,且不考虑结构阻尼,即ζ11=ζ12=ζ21=0。LQR控制中,状态变量和输入变量的权值矩阵和权值系数Q和R分别取为:

R=103
(17)
此时得到的最优反馈阵为
K=[0.0102-0.0014-0.0833-0.00130.0135-0.0014]
(18)

图6 利用最优模糊控制算法的仿真曲线 Fig.6 Time histories of optimal fuzzy control
模糊控制器的量化因子和比例因子分别取为:Ku=5×104、Kuc=200和KI=0.8×105。仿真采用经典Newmark-β数值方法,仿真步长取为0.000 1 s, 进行15 000次迭代运行,仿真结果如图6(a)~(e)所示。图6(a)~(e)分别为采用最优模糊控制策略的板的位移变化、驱动器控制力变化、光照强度变化、光生电场变化的曲线以及最优控制律和其变化率曲线。由图6(a)可见,三个模态的位移经过1.2 s左右都基本上衰减殆尽,振动得到了很好的抑制;在图6(b)中,由于三个模态各自的模态控制因子不同,因此不同模态的控制大小不一样,但变化规律相同;由图6(e)可见,最优控制律输入的变化范围为-4×10-4~4×10-4,其变化率的变化范围为-0.08~0.08,这为模糊控制器量化因子Ku、Kuc的选择提供了依据。在上述仿真中,将最优状态反馈及其变化率作为模糊控制器的输入,通过模糊控制器去调节光强,使驱动器的输出应变尽可能去逼近最优控制律,从而有效的抑制板的多模态振动。
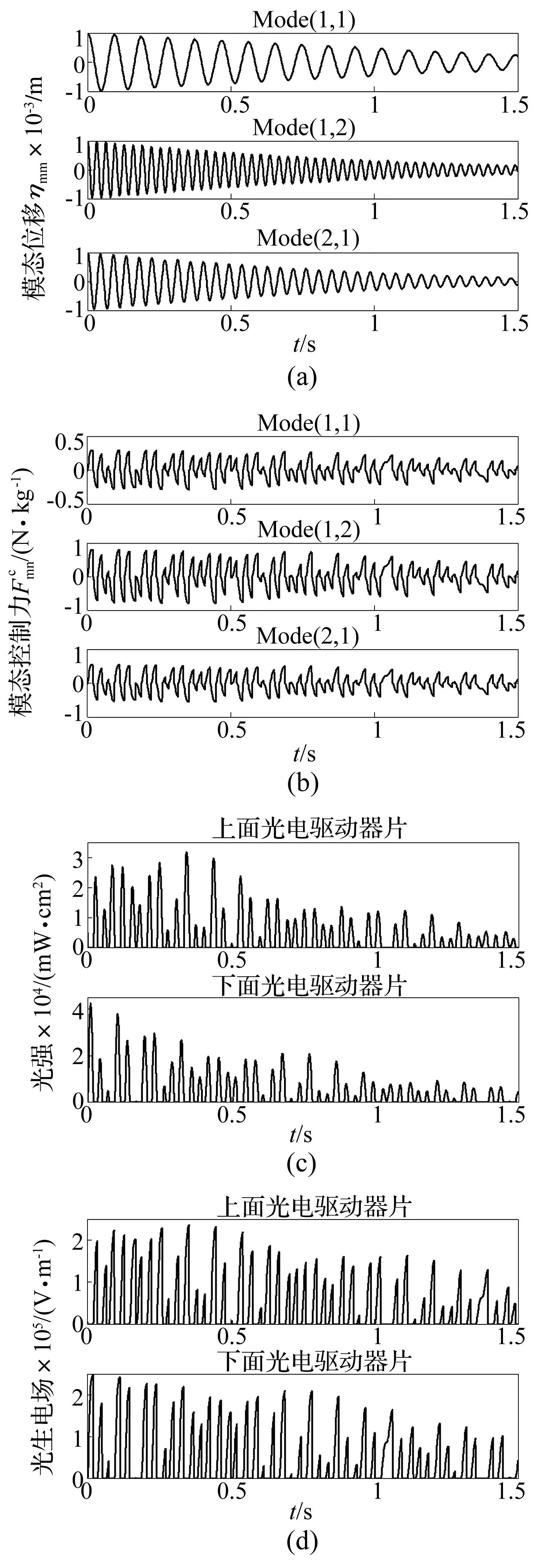
图7 利用最优状态反馈直接作用的仿真曲线 Fig.7 Time histories of optimal state feedback control
为了表明模糊控制在克服驱动器非线性方面的作用,在图3中将模糊控制环节去掉,利用设计的最优控制矩阵K直接作状态反馈重新进行仿真,即光强写为:
(19)
光照方向依旧按照控制信号u的符号的变化而变换方向,其仿真结果如图7(a)~(d)所示。图7(a)~(d)分别为板的位移变化、光电驱动器控制力变化、光强变化以及光生电场变化的曲线。由图7(a)可见,由于光电驱动器的非线性驱动特性,直接用最优状态反馈的效果并不是非常理想。比较而言,本文提出的最优模糊控制能够有效的克服驱动器的非线性驱动特性,成功的实现多模态振动抑制。
4结论
本文提出了基于光电层合简支板的最优模糊多模态主动振动控制算法。首先,基于简化的系统模型设计了LQR控制,然后通过模糊控制器调节光电驱动器的输入光强使其光致应变逼近最优控制量。研究表明, 和直接最优状态反馈控制策略相比,最优模糊控制可以克服光致驱动器的非线性驱动特性,更为有效地实现光电层合板的多模态振动控制。在最优模糊控制策略的设计过程当中,模糊控制器与最优控制器设计是分开设计的,相互独立。这种处理方法可以方便地把模糊控制器与其它的控制算法相结合,开发出其他有效的多模态控制方法。
参考文献
[1]Tzou H S, Chou C S. Nonlinear Opto-Electromechanics and photodeformation of optical actuators[J]. Smart Materials and Structures, 1996, 5: 230-235.
[2]Liu B, Tzou H S. Distributed photostrictive actuation and opto-piezothermoelasticity applied to vibration control ofplates [J]. Journal of Vibration and Acoustics, 1998, 120(4): 937-943.
[3]Shih H R, Smith R, Tzou H S. Photonic control of cylindrical shells with electro-optic photostrictive actuators[J]. AIAA Journal, 2004, 42(2): 341-347.
[4]Shih H R, Tzou H S. Structural vibration control using spatially configured Opto-Electromechanical actuator[J]. Journal of Sound and Vibration, 2005, 284(1): 361-378.
[5]Shih H R, Tzou H S. Photostrictive actuators for photonic control of shallow spherical shells[J]. Smart Materials and Structures, 2007, 16(5): 1712-1717.
[6]Shih H R, Tzou H S, Walters Jr W L. Photonic control of flexible structures-application to a free-floating parabolic membrane shell[J]. Smart Materials and Structures, 2009, 18(11): 115019.
[7]Sun D C, Tong L Y. Modeling of wireless remote shape control for beams using nonlinear photostrictive actuators [J]. International Journal of Solids and Structures, 2007, (44): 672-684.
[8]Sun D C, Tong L Y. Theoretical investigation on wireless vibration control of thin beams using photostrictive actuators [J]. Journal of Sound and Vibration, 2008, 312: 182-194.
[9]姜晶, 岳洪浩, 邓宗全, 等. 新型光电驱动器产生的非均匀力矩对板的控制[J]. 机械工程学报, 2010, 46(12): 175-181.
JIANG Jing, YUE Hong-hao, DENG Zong-quan, et al. Non- uniform control moments induced by a new photostrictive actuator design applied to plate control [J]. Journal of Mechanical Engineering, 2010, 46(12): 175-181.
[10]王新杰. PLZT光致伸缩特性及光电层合回转薄壳主动控制的研究[D]. 哈尔滨: 哈尔滨工业大学, 2011.
[11]陈德金,郑世杰. 简支板振动无线主动控制及驱动器优化布置研究[J]. 振动与冲击, 2012, 31(13): 62-65.
CHEN De-jin, ZHENG Shi-jie.Wireless vibration control of plate and the layout optimization of photostrictive actuators[J]. Journal of Vibration and Shock, 2012, 31(13): 62-65.
[12]Chen D J, Zheng S J, Wang H T. Genetic algorithm based LQR vibration wireless control of laminated plate using photostrictive actuators[J]. Earthquake Engineering and Engineering Vibration, 2012, 11(1): 83-90.
[13]He Rong-bo, Zheng Shi-jie. Independent modal variable structure fuzzy active vibration control of thin plates laminated with photostrictive actuators [J]. Chinese Journal of Aeronautics, 2013, 26(2): 350-356.
[14]王昊, 胡海岩. 整车悬架的最优模糊半主动控制[J]. 振动工程学报, 2005, 18(4): 438-442.
WANG Hao, HU Hai-yan. Optimal fuzzy control of a semi-active suspension of full-vehicle model [J]. Journal of Vibration Engineering, 2005, 18(4): 428-442.
[15]魏燕定, 娄军强, 吕永桂, 等. 振动主动控制中线性二次型最优控制问题研究[J]. 浙江大学学报(工学版), 2009, 43(3): 420-424.
WEI Yan-ding, LOU Jun-qiang, LÜ Yong-gui, et al. Research on linear quadratic optimal control problem in active vibration control [J]. Journal of Zhejiang University (Engineering Science), 2009, 43(3), 420-424.
[16]郑鑫森, 郑芝凤, 束慧君, 等. PLZT 陶瓷中的光致伏特效应的研究[J]. 功能材料, 1991, 22(6): 351-355.
ZHENG Xin-sen, ZHENG Zhi-feng, SU Hui-jun, et al.Study of the photovoltaic effect in PLZT ceramics[J]. Gongneng Cailiao, 1991, 22(6):351-355.
[17]张显奎, 李洪人, 许耀铭.PLZT陶瓷的光致电压效应和光致伸缩效应研究[J]. 哈尔滨工业大学学报,1997, 29 (3):1-3.
ZHANG Xian-ku, LI Hong-ren, XU Yao-ming. Study on photo-electric effect and photostrictive effect [J]. Journal of Harbin Institute of Technology, 1997, 29(3):1-3.

猜你喜欢
数学杂志(2022年2期)2022-09-27
汽车实用技术(2022年15期)2022-08-19
北京航空航天大学学报(2021年6期)2021-07-20
数学年刊A辑(中文版)(2021年1期)2021-06-09
成都信息工程大学学报(2021年6期)2021-02-12
电脑知识与技术(2020年15期)2020-07-04
电子制作(2019年16期)2019-09-27
财会学习(2018年2期)2018-01-24
制造技术与机床(2017年7期)2018-01-19
电子制作(2016年21期)2016-05-17