雷达光电智能协同探测技术研究∗
2016-01-10 11:40任清安吕春燕
雷达科学与技术 2016年2期
任清安,吕春燕
(1.中国电子科技集团公司第三十八研究所,安徽合肥230088;2.智能情报处理重点实验室,安徽合肥230088;3.孔径阵列与空间探测安徽省重点实验室,安徽合肥230088;4.枣庄科技职业学院,山东滕州277500)
0 引言
低慢小目标具有以下特点:1)飞行高度低;2)飞行速度慢;3)反射截面积小;4)热辐射低;5)具有一定航程;6)具有一定载荷;7)对放飞场地要求低,无需专业培训。故低慢小目标对城市日常防空构成严重威胁。
近年来,光电设备在低慢小目标跟踪、威胁评估、目标识别中发挥了越来越重要的作用。与雷达相比,光电设备具有价格低、布站灵活、探测精度高、数据率高(小于1秒/帧)、不易受电磁干扰等优点,能够提高威胁评估、目标识别的能力,但光电设备只提供测角信息。因此,光电设备经常与雷达、激光测距设备等传感器一起配合使用。激光测距设备测距范围近、造价高,且采样频率远低于光电跟踪的采样频率,在实装中激光测距设备的作用有限,而雷达探测范围广、目标跟踪灵活,同时对地慢小探测雷达一般都是二维(距离、方位)的,所以利用雷达光电设备的优势互补,可以实现低慢小目标的有效探测[1-4]。
雷达光电协同跟踪不但能够提高跟踪的精度和数据率,而且还可以根据光电数据的俯仰角,解算目标高度,为低慢小目标的打击提供高质量的引导数据。
现有的雷达光电数据融合主要采用以下流程:
1)光电数据获取距离信息:由于光电数据只提供角度信息,一般利用雷达数据滤波预报的距离作为光电数据的距离信息;
2)雷达和光电数据同步:雷达和光电数据是不同步的,一般采用内插、外推的方法将雷达和光电数据对齐;
3)融合算法:根据雷达和光电同步的数据,采用集中/分布式融合,滤波方法有标准KF,EKF,UKF,IMM-EKF和IMM-UKF等[5-10]。
当前雷达光电数据融合存在以下缺点:1)雷达的数据率较低(大约10秒/帧),利用雷达数据滤波预报的目标距离精度较差,特别是目标发生强机动时;2)光电数据率较高(一般小于1秒/帧),雷达利用内插外推与光电数据同步,会导致雷达内插或者外推的点迹精度降低,特别当目标发生强机动时。
针对低慢小目标,首先提出了光电雷达协同探测的流程,并提出了基于雷达光电数据的距离解耦算法,大大地提高了光电的预报精度。并采用基于IMM-BLUE的序贯集中式融合算法解决了雷达光电的协同跟踪算法,不但提高了雷达光电协同跟踪的精度和数据率,同时给出了较高精度的高度信息,为低慢小目标提供高质量的引导信息,同时可以利用光电的图像信息对目标进行识别和威胁识别。
1 雷达光电协同跟踪原理
1.1 雷达光电协同跟踪流程
在低慢小目标探测中,当目标威胁等级较高时,雷达操作人员将该目标的批号发送到雷达数据处理,对该目标进行重点跟踪,同时将滤波值转化到光电站心极坐标系,并发送至光电设备,光电截获目标后立即锁定,并转为跟踪模式,同时将目标角度信息和图像信息传输至协同处理中心,并在红外站心坐标系完成雷达与光电数据的融合和高度的计算,获取目标精确的距离、方位、高度及速度信息,同时进行基于目标图像信息的分类识别处理,并进行威胁确认,形成最终情报信息上报上级指挥所,并转发雷达数据处理。具体流程如图1所示。
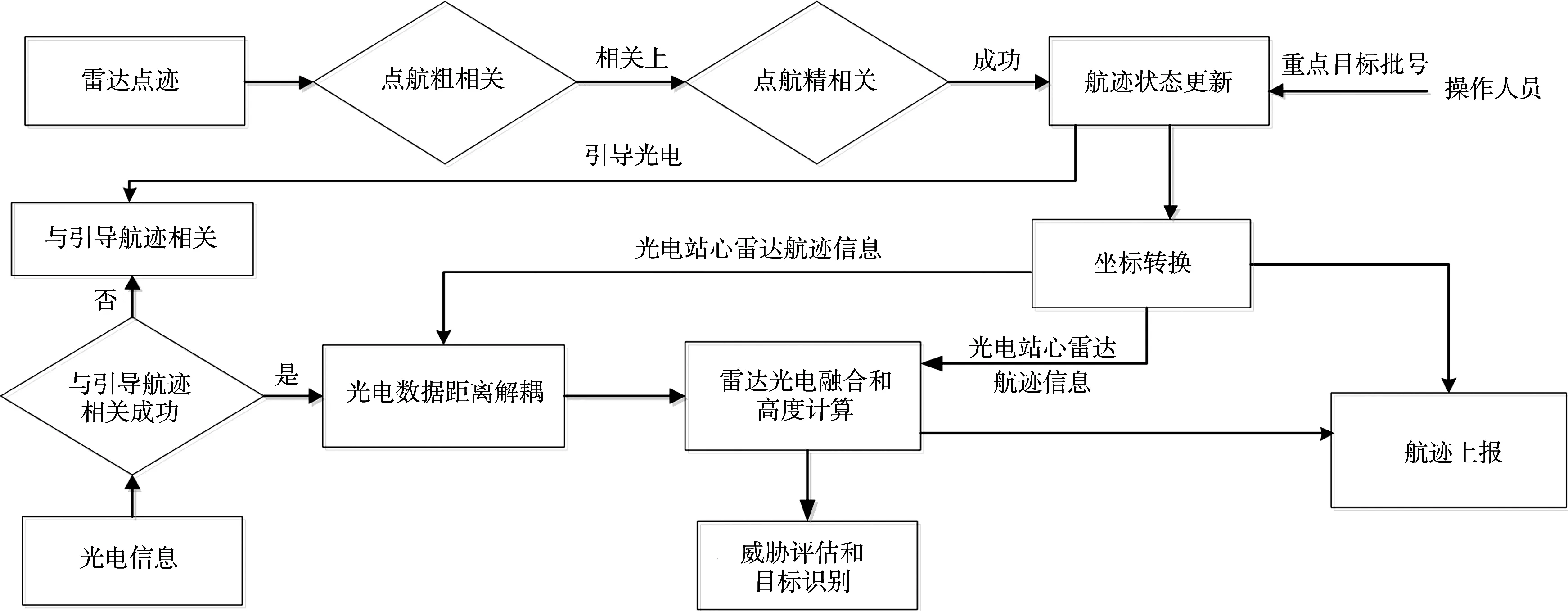
图1 雷达光电协同跟踪流程
1.2 雷达光电序贯集中式融合流程
协同处理中心接收到信息时,首先判断是光电信息还是雷达的航迹信息,如果是雷达的航迹信息,则直接进行IMM-BLUE处理,并进行俯仰Singer模型预报;如果是光电信息,需要确定是否与雷达引导航迹相关成功,如果没有成功,光电数据丢弃,如果相关成功,则进行光电数据距离解耦,并进行IMM-BLUE处理、俯仰Singer模型滤波。根据IMM-BLUE处理的距离、方位估计值及俯仰Singer滤波/预报值进行大地坐标转换[11],得到目标的高度。具体流程如图2所示。

图2 雷达光电序贯集中式融合流程
2 距离解耦算法
雷达的数据率一般为10秒/帧,光电的数据率小于1秒/帧,当目标发生高机动时,雷达数据滤波给出的预报距离信息,精度将大大降低。
数据假设k时刻,光电站心雷达数据滤波值分别为时刻目标水平速度的估计值为时刻,光电给出的方位为,在较短的时间差Δt=l-k(≤1 s)内,目标的运动速度基本不变,且运动轨迹接近于直线,具体如图3所示。

图3 光电距离解耦示意图
1)求夹角∠OAB,由正弦定理得

2)求O B的边长R,利用余弦定理得

3 基于IMM-BLUE的序贯集中融合算法
由于雷达和光电的量测方程是非线性的,而状态方程是线性的混合坐标系,非线性量测的最优线性无偏滤波(BLUE)[12]是针对该混合坐标系提出来的,其性能比EKF、UKF、去偏量测转换方法[13]、无偏量测转换方法[14]、修正的无偏量测转换方法好。针对高机动目标的运动模型和雷达光电量测模型的非线性,提出基于IM M-BLUE的数据融合方法。在模型集设计上采用传统的两模型组合:一个非机动(匀速CV)模型和一个机动(Singer)模型[15]。
3.1 基于BLUE准则的二维量测转换
假设目标按照如下的线性动态模型运动:

式中,ωk表示均值为零且方差为Qk的白噪声序列。
雷达和光电(补距离)的量测是两维的:



由上面推导就可以采用文献[10]中的最优线性无偏滤波方法。
3.2 IMM跟踪方法描述
交互式多模型(Interactive Multiple Model,IM M)[11-12,14]将各个机动目标模型并行运行,输出结果取它们的加权和,是近几年来使用较为广泛的算法。
1)模型条件重初始化
模型条件重初始化(Model-Conditional Re-Initialization)是在假定第j个模型在当前时刻有效的条件下,与其匹配的滤波器的输入由上一时刻各滤波器的估计混合而成。
2)混合概率(Mixing Probability)
假定第k-1时刻的匹配模型是M(i)k-1,而在k时刻的匹配模型是M(j)k,以信息z k-1为条件的混合概率是

式中,πij为假定的马尔可夫模型转移概率为k-1时刻的模型的概率,其中¯c j=
3)混合估计
混合估计(Mixing Estimation),即按混合概率进行初始化状态与协方差:
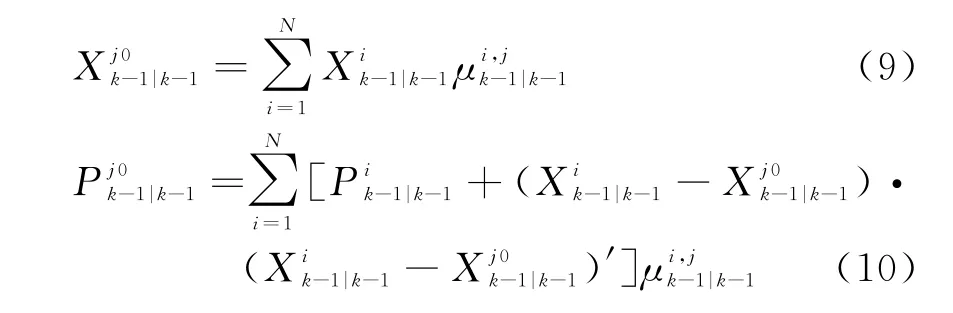
4)状态预测
状态预测,即分别计算:

5)状态更新
状态更新,即分别计算:

计算似然函数并更新模型概率为

式中,c为归一化常数:


计算k时刻,系统融合后的状态和误差协方差阵:

4 性能分析
在工程试验中,雷达光电设备对无人机进行联合探测,雷达航迹起始后,引导光电设备对目标进行跟踪,第8帧后光电设备截获并锁定目标,转为跟踪模式,同时将目标角度信息和图像信息传输至雷达情报处理,雷达情报处理采用基于雷达光电数据的距离解耦算法和基于IMM-BLUE的序贯集中式融合算法将雷达与光电数据进行融合,获取目标高精度的距离、方位、高度信息,当雷达光电协同跟踪一段时间后,光电设备跟踪丢失,故联合探测结束。具体如图4所示。

图4 雷达光电联合跟踪效果
高度估计值如图5所示。
雷达的数据率为10秒/帧,光电的数据率为0.5秒/帧。由表1的实验结果可以看出,基于IMM-BLUE的序贯集中式融合算法具有高数据更新率,在跟踪精度上占优,特别在非机动段上跟踪精度占有明显的优势(如表2所示)。

图5 高度计算值

表1 均方根误差对比
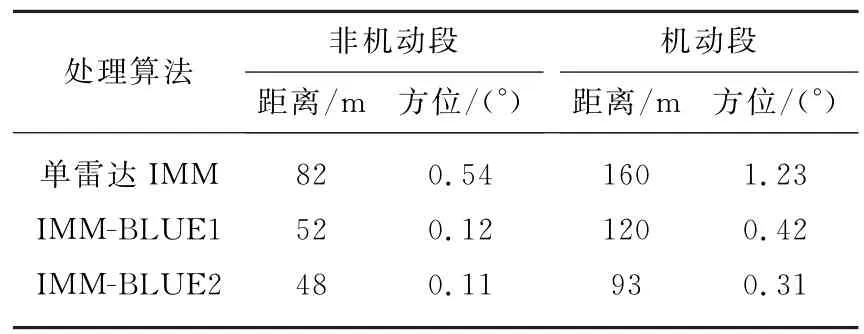
表2 非机动段和机动段均方根误差对比
表2中IMM-BLUE1和IMM-BLUE2表示都采用了基于IMM-BLUE的序贯集中式融合算法,其中IMM-BLUE1未采用基于雷达光电数据的距离解耦算法,IMM-BLUE2采用基于雷达光电数据的距离解耦算法。由表2可以看出,采用基于雷达光电数据的距离解耦算法能够较大提高强机动目标的跟踪精度。
5 结束语
针对当前雷达光电融合算法存在的问题,首先给出了雷达光电协同跟踪的数据处理流程,然后提出了基于雷达光电数据的光电数据距离解耦算法,最后根据雷达光电数据的特点提出了基于IMM-BLUE的序贯集中式融合算法。通过工程试验证明该算法不但提高了雷达光电跟踪精度和数据率,而且给出了目标的精确高度信息,从而为低慢小目标的打击,提供了高质量的引导信息,特别是目标发生高机动时,效果更明显。
[1]殷艳华,王学伟.雷达/红外成像复合制导信息融合技术[J].红外与激光工程,2009,38(3):548-552.YIN Yanhua,WANG Xuewei,Information Fusion Based on Radar/IR Imaging Compound Guidance[J].Infraed and Laser Engineering,2009,38(3):548-552.(in Chinese)
[2]朱安福,景占荣,羊彦,等.UKF及其在目标跟踪中的应用[J].火力与指挥控制,2008,33(8):27-29.
[3]李相平,王光复,谢志敏.毫米波/红外复合制导目标融合跟踪算法[J].制导与引信,2010,31(1):9-13.
[4]方青,任清安.机载有源无源传感器稳健融合方法[J].雷达科学与技术,2011,9(1):34-38.FANG Qing,REN Qingan.Research on Robust Fusion Method of Airborne Passive and Active Sensors[J].Radar Science and Technology,2011,9(1):34-38.(in Chinese)
[5]杨万海.多传感器数据融合及其应用[M].西安:西安电子科技大学出版社,2004:62-65.
[6]何友,王国宏,彭应宁,等.多传感器信息融合及应用[M].北京:电子工业出版社,2000:210-224.
[7]FARRELL W.Interacting Multiple Model Filter for Tactical Ballistic Missile Tracking[J].IEEE Trans on Aerospace and Electronic Systems,2008,44(2):418-426.
[8]MAZOR E,AVERBUCH A,BAR-SHALOM Y,et al.Interacting Multiple Model Methods in Target Tracking:A Survey[J].IEEE Trans on Aerospace and Electronic Systems,1998,34(1):103-123.
[9]ZHU Yunmin.Multisensor Decision and Estimation Fusion[M].Norwell,MA:Kluwer Academic Publishers,2003:175-200.
[10]BAR-SHALOM Y,BLAIR W D.Multitarget-Multisensor Tracking:Applications and Advances:Volume III[M].Boston,MA:Artech House,2000:125-167.
[11]崔永俊.空间直角坐标与大地坐标之间的变换方法研究[J].华北工学院学报,2003,24(1):73-75.CUI Yongjun.Study on the Transformation Methods Between Rectangular Space Coordinate and Geodetic Coordinate[J].Journal of North China Institute of Technology,2003,24(1):73-75.(in Chinese)
[12]ZHAO Zhanlue,LI X R,JILKOV V P.Best Linear Unbiased Filtering with Nonlinear Measurements for Target Tracking[J].IEEE Trans onAerospace and Electronic Systems,2004,40(4):1324-1336.
[13]LERRO D,BAR-SHALOM Y.Tracking with Debiased Consistent Converted Measurements Versus EKF[J].IEEE Trans on Aerospace and Electronic Systems,1993,29(3):1015-1022.
[14]SONG Xiaoquan,ZHOU Yiyu,BAR-SHALOM Y.Unbiased Converted Measurements for Tracking[J].IEEE Trans on Aerospace and Electronic Systems,1998,34(3):1023-1027.
[15]LI X R,JILKOV V P.Survey of Maneuvering Target Tracking.Part I:Dynamic Models[J].IEEE Trans on Aerospace and Electronic Systems,2003,39(4):1333-1364.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
北京航空航天大学学报(2022年6期)2022-07-02
新班主任(2022年4期)2022-04-27
科学大众(2020年23期)2021-01-18
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
汽车观察(2019年2期)2019-03-15
小学生学习指导(低年级)(2018年12期)2018-12-29
电子制作(2018年16期)2018-09-26
火控雷达技术(2016年3期)2016-02-06