要地警戒雷达目标特征提取及分类研究∗
2016-01-10 11:40
雷达科学与技术 2016年2期
(国防科技大学电子科学与工程学院,湖南长沙410073)
0 引言
雷达多普勒效应是指目标与雷达之间的相对运动导致雷达回波信号频率发生频移的一种物理现象。多普勒效应已在雷达杂波抑制、雷达分辨率提高、雷达成像等方面产生了重要应用。近十多年来,由雷达目标部件产生的微多普勒效应引起了学界广泛关注。微多普勒效应是指雷达目标上微小运动部件的振动或旋转对雷达回波信号造成频率调制,使多普勒频谱展宽或产生边带的现象[1-2]。利用人体某些部位的运动所引起的雷达微多普勒效应,实现人体目标的探测、定位、行为分类,已在现代战争、医疗救援、安全保卫方面得到了广泛应用[3-4]。对于人体目标而言,文献[5]将人体各肢体运动进行了仿真并通过实测数据对运动参数进行了估计,运用支持矢量机对单人运动模式进行分类;文献[6]基于广义S变化对人体行走中主体部位的微多普勒特征进行了仿真,但是并未在实测中加以运用。对于车辆目标来说,文献[7]较为详细地对轮式及履带式车辆目标进行了建模,并采用线性辨别分类器、特征谱分析等方法对轮式和履带式车辆进行分类,算法较为复杂,主要针对车辆目标,且对复杂环境的考虑较为欠缺;文献[8]提出两种基于微多普勒特征方法,对轮式和履带式车辆进行了分类,但是前提条件为窄带雷达。
对于要地警戒雷达来说,在战场主要用于探测敌方部队的行踪和监视战区前沿,在和平时期也用于重要部位的安防,如某警戒区域、监狱等,对维护人民生命和财产安全起到重要作用。要地警戒雷达主要用于探测识别人和车辆,对于运动或者低速运动的目标均可以进行检测,通过多普勒效应分类识别运动目标,以及通过微多普勒特征发现微动规律是必须要解决的问题之一。本文结合实测雷达数据,通过频域转换、特性滤波、提取目标运动轨迹等一系列方法对信号进行处理后,利用能量求和、门限判别、取均值和短时傅里叶对目标特征进行提取分析。实验结果表明,通过对目标散射强度、距离扩展宽度、速度和步态频率四种不同特征的对比,能够有效准确地实现对人和车辆的分类和识别。
1 雷达系统设计和信号处理方法
调频连续波雷达(FMCW)采用连续波体制,具有较大的带宽,可以有效消除距离盲区,获得更准确的距离精度和距离分辨率。FMCW雷达系统框图如图1所示。FMCW信号功率放大后,经发射天线辐射。地面散射信号经接收天线和低噪声放大后,进行去斜混频处理,最后经数-模转换后,由数据处理部分完成数据存储或者实时成像处理。
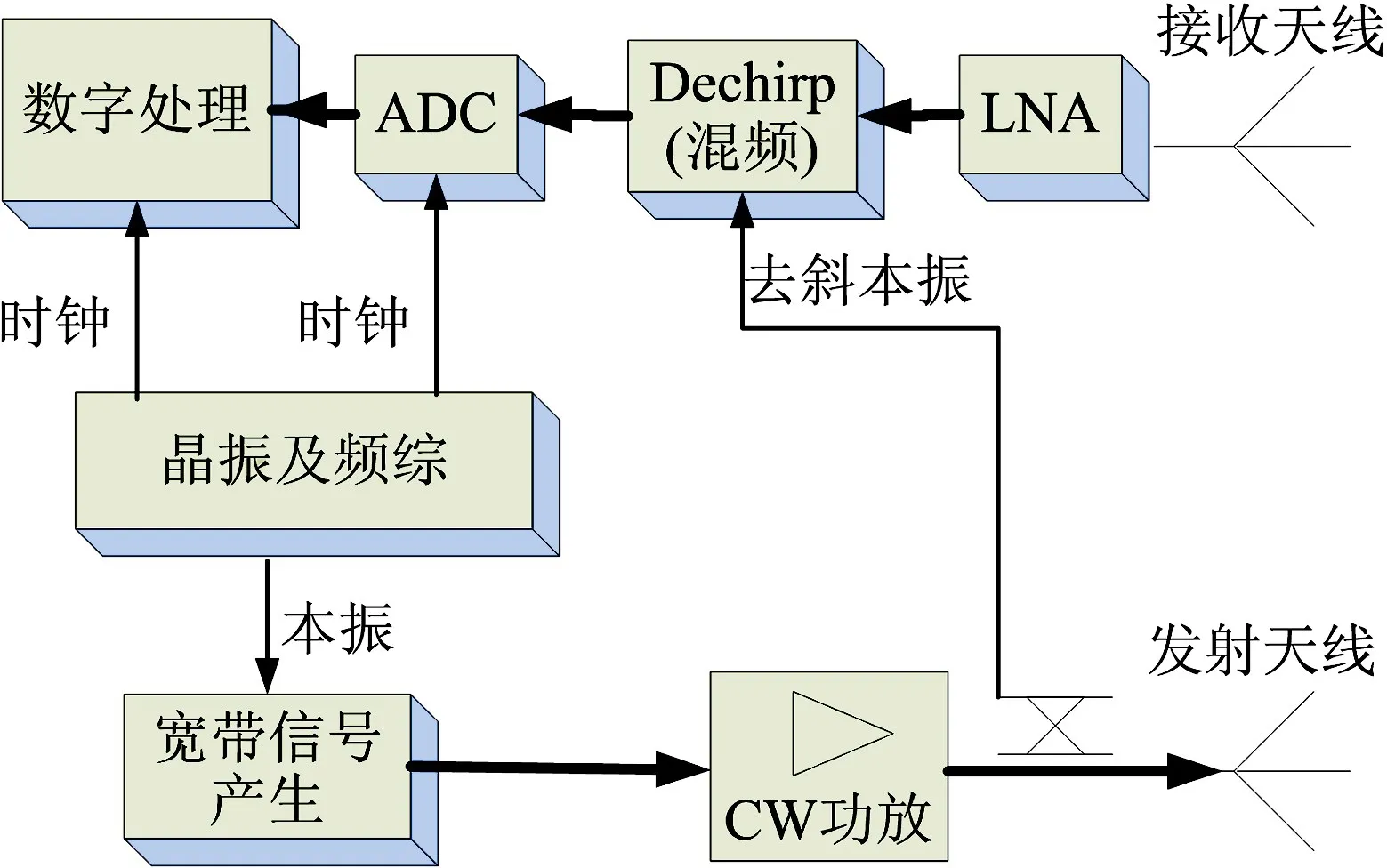
图1 FMCW雷达系统框图
就系统实现而言,发射机无需发射高峰值功率信号,简化了发射机实现;由于采用Dechirp接收,降低了后端续信号带宽,从而降低了数据采集和处理的实现难度。
假设发射锯齿型线性调频连续波(LFMCW),发射信号表示为

式中,tm=m T(m=0,1,…,M-1)为慢时间,T为脉冲重复间隔,^t=t-tm为快时间,fc为载频,μ为调频率,Tp为脉冲持续时间。接收端Dechirp处理后,去中频,采样信号可以表示为
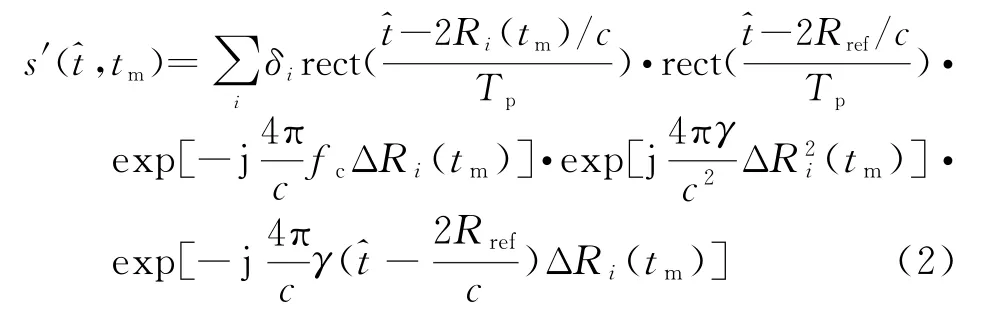
式中,R i(tm)≠0为tm时刻散射点i的距离,δi为对应的散射系数,Rref为参考距离,ΔR i(tm)=R i(tm)-Rref为点目标与参考距离之差。在式(2)中,第一个指数项与目标距离点有关,当目标为静止点目标时,该项为固定相位项;第二个指数项为与目标距离的平方成正比的相位项,称为残余视频相位(RVP);第三个指数项为时间的一次项,表明差频信号是单频信号,且频率与ΔR i(tm)成正比。此时较高的载频被去除,对差频信号进行采样的频率大大下降,大大降低了数据量。对上式快时间进行傅里叶变换,就可以得到距离维信号:
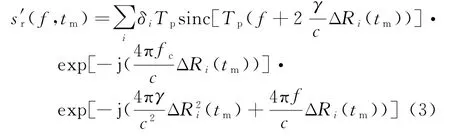
可以看出,差频信号在距离频域上为sinc状的窄脉冲,脉冲宽度为1/Tp。其中第二指数项为R i(tm)≠0时的包络置斜项。sinc(u)=处,相位就是我们需要的多普勒信息。第二和第三个指数项会对信号产生干扰,需要进行消除,由于sinc函数其峰值位于f=可以近似地认为,要对距离为R i(tm)的目标进行处的相位消除即可。对后面两个指数项进行代换化简可得

对式(5)离散化:
式中,fΔ为频率采样间隔,n=0,1,…,N-1为频率采样点,距离即为因此也将称为时间-距离像。
实际场景中存在着大量的静物杂波,而运动人体多普勒频谱较为微弱,淹没在静物杂波中,因此为了检测运动目标,必须要对这些静止杂波进行抑制。静止目标在距离向上表现为沿慢时间的一条直线,常用的静物杂波抑制的方法有方位向滤波和二脉冲对消等方法。在本文中采用高通滤波实现对静物杂波进行抑制。杂波抑制后,我们发现运动目标在距离向上表现为沿慢时间的一条斜线。Hough变换是分离图像中具有相同特征几何形状最简单有效的方法之一,它对直线信息的提取非常灵敏。这里采用它来提取目标运动直线轨迹,提取运动轨迹周围的距离单元就包含运动目标的全部多普勒信息。
目标运动会使目标产生越距离单元徙动,为了分析目标运动的微多普勒特征,可以将sr(n,m)沿距离维累加形成沿时间维的一维信号,对该一维信号进行短时傅里叶变换即可得到实际目标运动的微多普勒谱,即

2 实验结果与分析
2.1 实验场景
实验中雷达工作在Ku波段,发射带宽为600 MHz,脉冲重复频率(PRF)为2 000 Hz。为了实验的顺利进行,我们选择的实验场景为一湖面开阔地带,如图2所示的Google地图。
实际实验场景图如图3所示。图4为实验场景布置图。将雷达置于湖上小岛岸边A1位置,对湖东侧简易公路距离724 m的“T”型区域进行照射,运动路径从A2到A3位置(约92 m),场地空旷,无明显建筑。

图2 实验场景示意图

图3 实际实验场景图
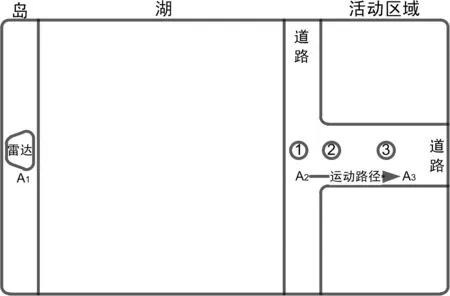
图4 实验场景布置图
在实验中加入3个运动目标,其中目标1和目标2为人体目标,目标3为车辆目标(三厢小轿车),3个目标均在雷达径向方向上远离雷达方向运动(从A2向A3方向运动),目标1和目标2之间距离5 m,目标2和目标3之间距离10 m,目标1以匀速跑步接近步行中的目标2,其所在的位置与径向速度如表1所示。
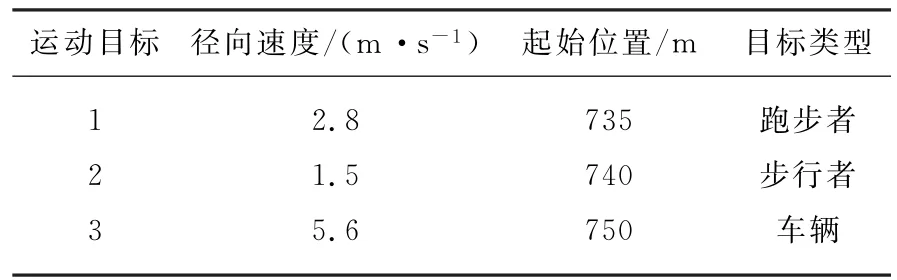
表1 运动目标参数
2.2 实验结果分析
通过对实测数据的处理得到杂波抑制前的时间-距离像(如图5所示)和高通滤波杂波抑制后的时间-距离像(如图6所示,为了便于显示,图中只截取了部分场景),可以看到,静止目标随着时间的变化在距离向上表现为一条水平的直线,而运动的目标随着时间的变化,在距离向上有明显的位移,表现为一条斜线(在距离轴750~800 m之间)。杂波抑制后,可以清晰地观察到运动目标的轨迹。
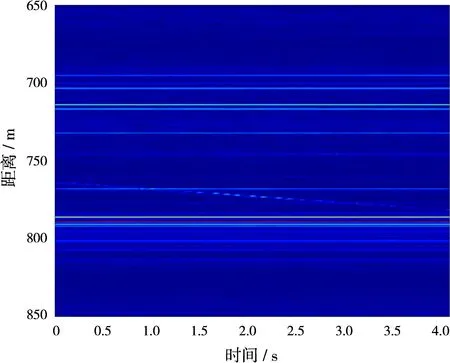
图5 杂波抑制前的时间距离像
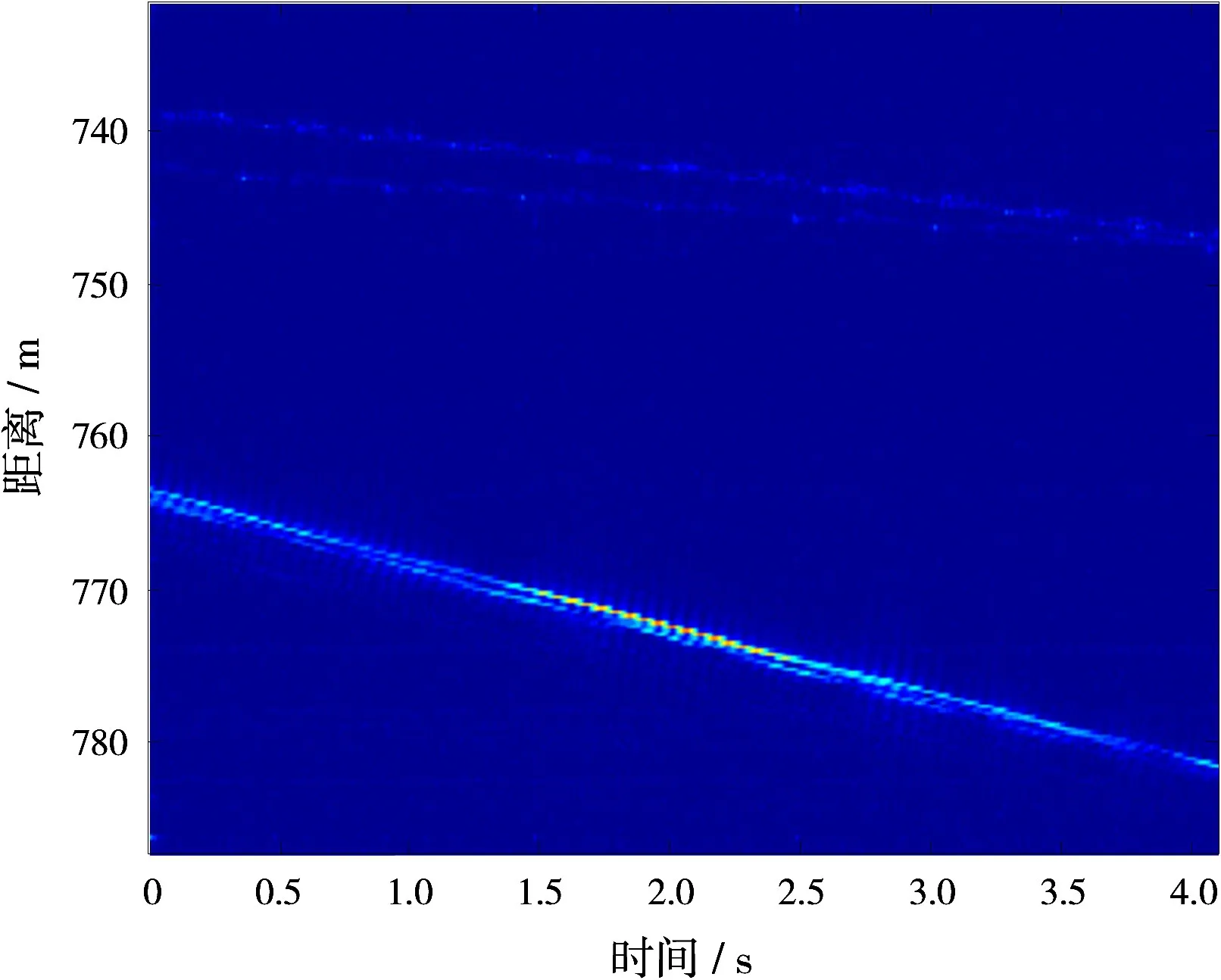
图6 杂波抑制后的时间距离像
2.2.1 散射强度分析
通过对图5的观察,仅能够发现一条较为明显的斜线,其他直线均为静止目标,由此可以判定另外两个运动目标被淹没在静物杂波中。杂波抑制后,可以清晰地看到3条运动轨迹,由上到下依次对应1,2,3号运动目标,其中以车辆的运动轨迹最为明显,同时,也可以看到两个人体在运动过程中因为速度的不同最终会在某个距离位置上相遇。在文献[9]中将行人的RCS典型数值为0.3~1 m2(0 dB),车辆的RCS典型数值为5~100 m2(7~20 dB)。以上图的实测数据为例,为了便于能量统计,对不同的目标轨迹分别乘以一个线性相位,使目标能量集中在一个矩形区域内,通过对幅值求和计算得到车辆的能量为72.02 dB,人的能量为54.26 dB,两者的差值约为17.76 dB,与文献[9]描述的RCS数值基本一致,因此,可以把目标散射强度作为区分人和车辆的一种基本度量。
2.2.2 距离扩展目标分析
对于高分辨率雷达,它的距离分辨率通常可达亚米级到米级。这一方面导致目标在距离向上可能占据多个距离分辨单元,即目标表现为距离扩展目标,另一方面导致目标在雷达观测期间可能跨越多个距离单元,即目标发生越距离单元走动。以图6为例,我们发现对于不同的目标由于其尺寸大小存在差异,在相同的杂波抑制条件下,车辆和人所形成的扩展目标像明显不同。人体和车辆距离扩展宽度如图7、图8所示。
因此,也可以将距离扩展作为区分不同目标的一种方法。对于我们的雷达体制而言,采取的方法是对不同目标信号幅值设置一定的门限,以车辆为例,以车辆散射中心能量最强点幅值为3.64(11.22 dB)的1/3约为1.21(1.66 dB)作为门限,将剩余的点置零,通过观察发现车辆的越距离单元为5(在数据处理中,单元距离宽度为0.24 m),在距离向上求得车的距离扩展为1.22 m。人的散射中心能量最强点幅值为1.18(1.44 d B)的1/3约为0.39(-8.18 dB),发现人的越距离单元为3,在距离向上求得的距离扩展为0.73 m。
2.2.3 速度分析
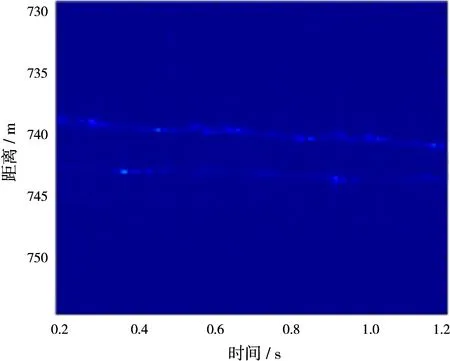
图7 人体距离扩展宽度
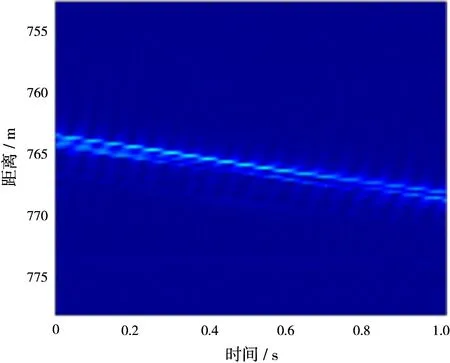
图8 车辆距离扩展宽度
一般情况下,正常成年人走路的步速一般为1.5 m/s左右(不超过5 m/s);跑步速度一般为2.8~8.3 m/s(不超过10 m/s)。通过图6可以计算得到目标1在4 s内的平均速度为2.1 m/s(跑步者速度较慢的原因是为了下一步提取较为理想的微多普勒特征,所以使跑步者在较低速度运动,从而获得一个较好的多普勒频率),在零时刻位置位于738 m;目标2在4 s内的平均速度为1.2 m/s,在零时刻位置位于742 m。对车辆的速度进行计算,得到目标3在4 s内的平均速度为4.5 m/s。通过与运动目标参数相比较,我们发现实验计算结果与理论值基本一致。
2.2.4 步态频率分析
由成像原理可知,当目标速度在雷达视线(LOS)方向分量为朝向雷达运动时产生正的多普勒频移,目标远离雷达方向时产生负的多普勒频移,多普勒频移的表达式为

式中,v为目标沿着雷达视线的径向速度,λ为信号波长,f0为发射频率。将离散化的信号通过Hough变换找到峰值点,如图9所示,其中峰值点较为分散的为车辆目标,峰值点较为集中的为人体目标,由于两个人体运动轨迹斜率相差不大,所以两个峰值点距离比较靠近。在时间-距离向上提取运动目标轨迹,得到的结果如图10所示,白色直线即为目标的运动轨迹,用以获取运动目标的纹理特征,白色直线以及周围的距离单元就包含目标的全部多普勒信息,便于下一步分析研究。
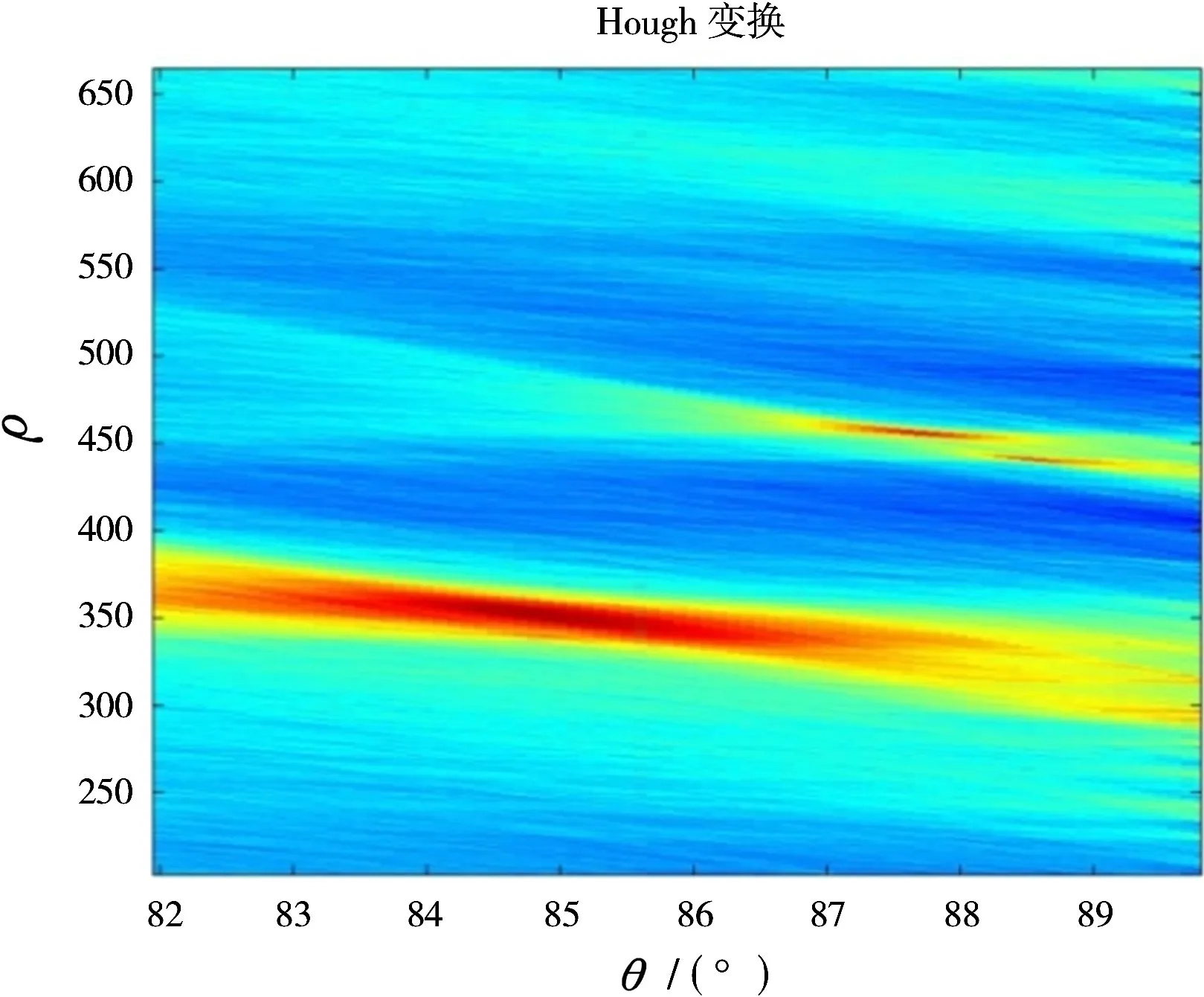
图9 Hough变换空间
我们看到在图10中存在这样的问题,在对车辆回波信号进行Hough变换时,提取到的直线与运动轨迹没法完全覆盖,这一方面是散射干扰造成的,另一方面也是由距离扩展目标造成的。
由于目标运动会使目标产生越距离单元徙动,为了分析运动目标的微多普勒特征,对离散信号沿距离维累加形成沿时间维的一维信号,在该一维信号进行短时傅里叶变换即可得到实际运动目标的微多普勒谱,如式(7),得到的结果如图11~13所示。
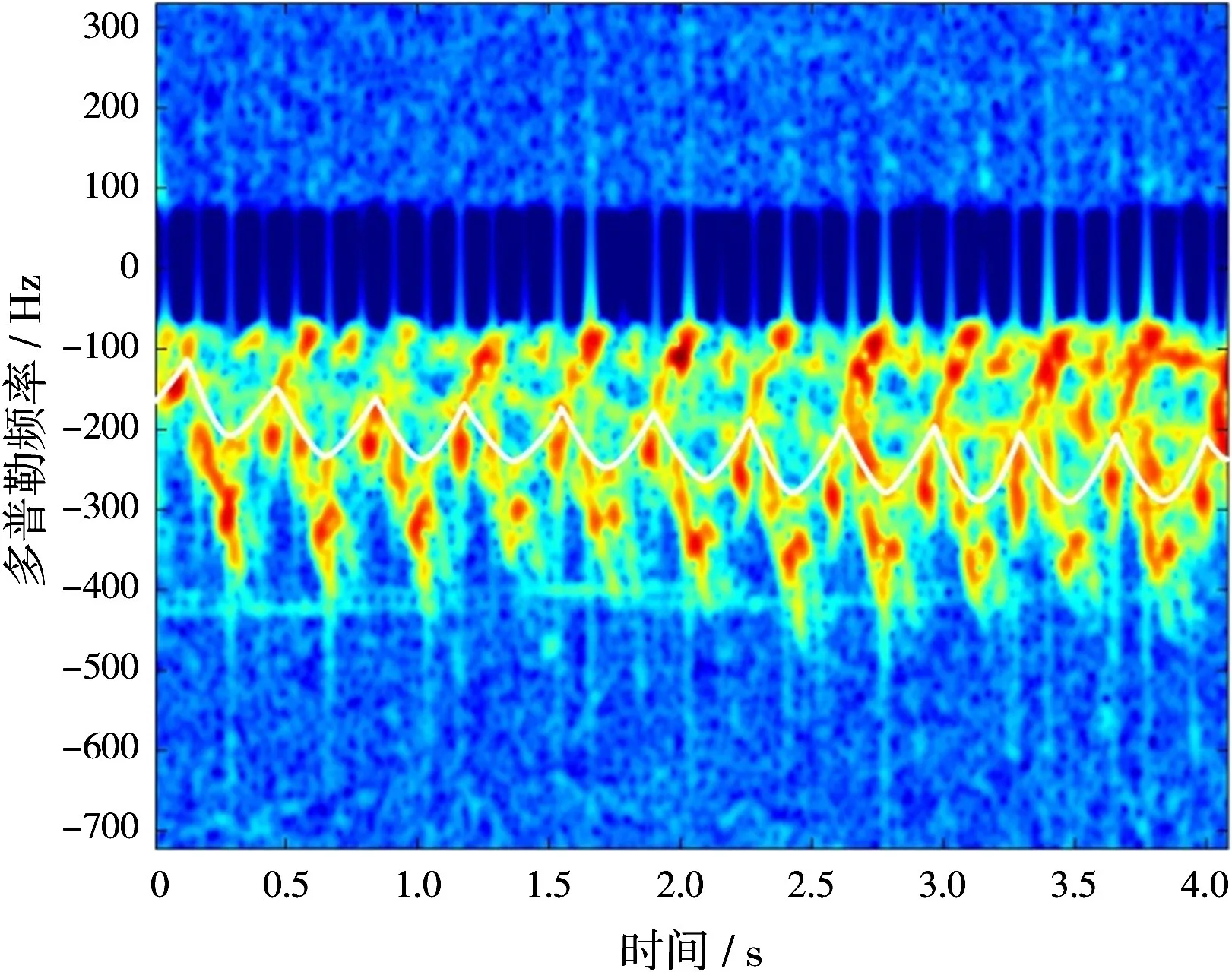
图11 跑步者微多普勒频率分析
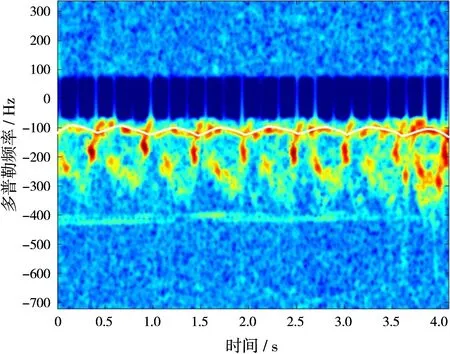
图12 步行者微多普勒频率分析
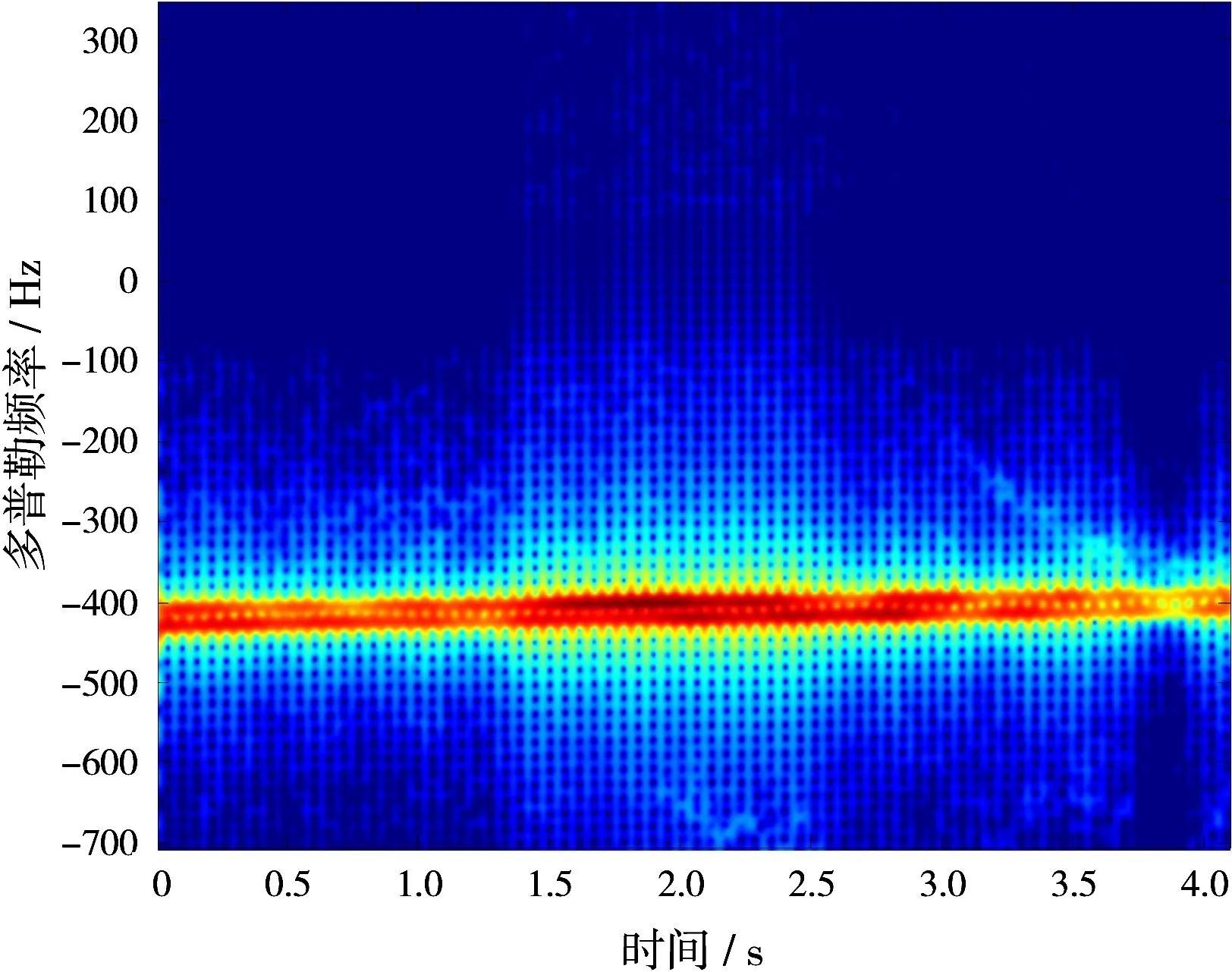
图13 车辆微多普勒频率分析
通过图11和图12对比我们不难发现,人在运动过程中各部位的微动随着姿态的不同,所对应的频率也不同,在图像中表现出的周期性和幅度也就不同。我们用实际的平均速度计算出跑步者和步行者多普勒频率分别约为200 Hz和110 Hz,可以在图中(白色曲线部分所示)明显看到所对应的就是人的躯干中心频率。跑步者躯干相对应的正弦曲线幅度其实就是人在运动中躯干的速度变化量,约为0.53 m/s,周期为0.35 s;步行者在运动中躯干的速度变化量约为0.32 m/s,周期为0.53 s。这与文献[5]所阐述的结果一致;对于不同速度的车辆微动信息检测中我们发现,在时间 距离像上,车辆的微多普勒信息几近为一条宽带(如图13所示),微多普勒特性不明显,区别仅在于多普勒中心频率随着速度的不同而不同,如图14、图15所示,分别表示速度为20 km/h和36 km/h车辆多普勒频率,这与文献[7]所表述的一致,得到目标3的多普勒中心频率近似为410 Hz。但是我们大体上也仍然可以看到一些类似于包络状的曲线,而且随着速度的增大,汽车在多普勒频率向上的频率范围也随之增大,下一步我们会继续对这些信息进行分析研究。
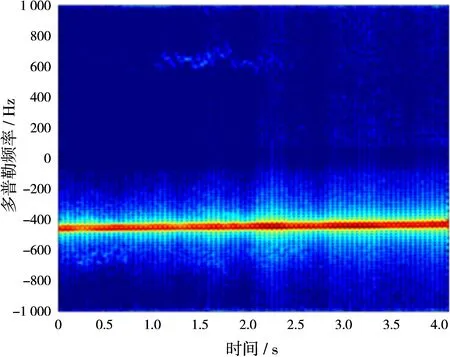
图14 车辆20 km/h多普勒频率
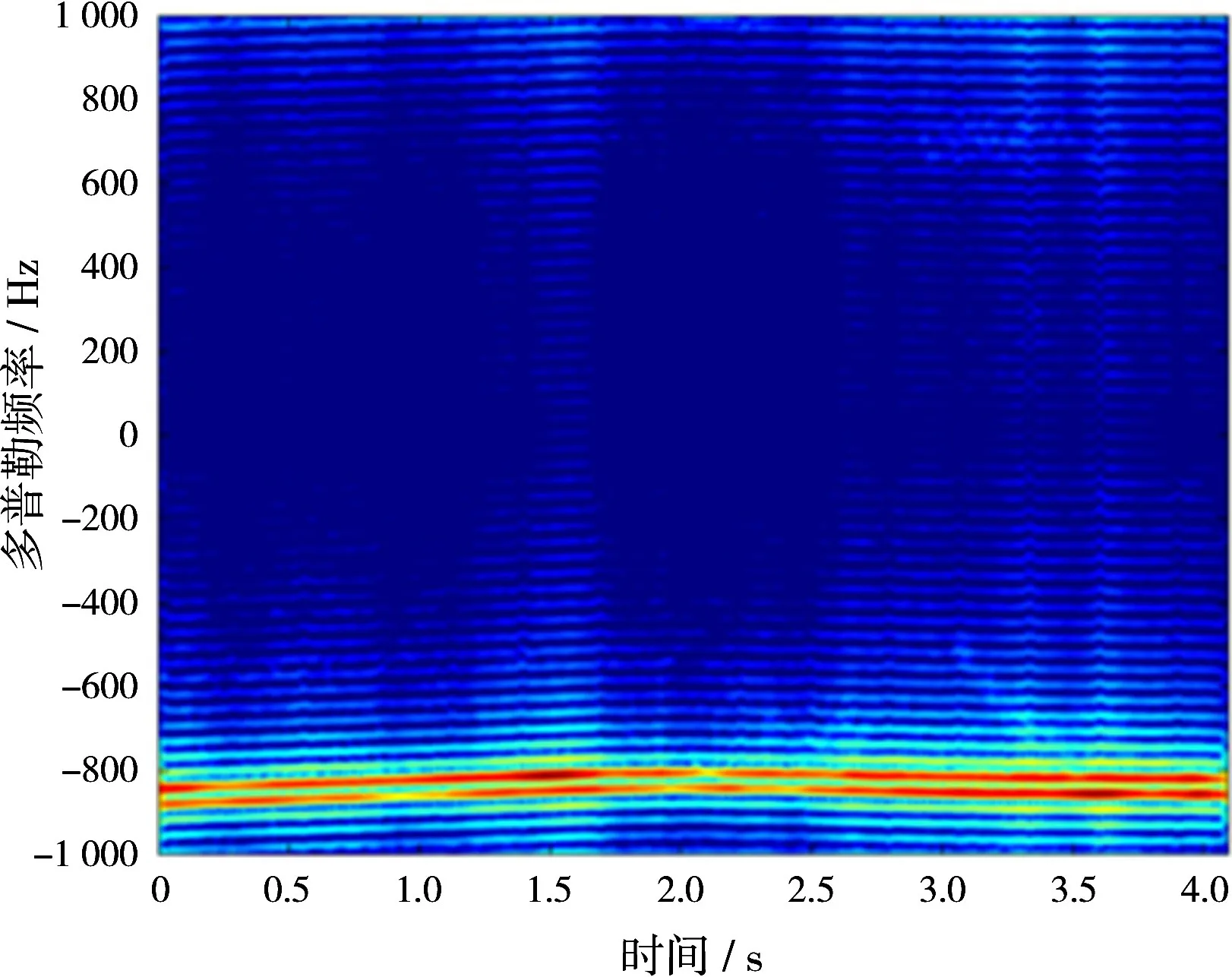
图15 车辆36 km/h多普勒频率
通过图6~图8、图11~图15结果的分析比较,可以较为准确地区分出人和车辆目标,并将其作为目标分类的一种方法。该方法提取特征容易,运算快速简单,尤其适用于较为简单的开阔场地。它的主要优点有:一是对现有的Ku波段连续波雷达接收到回波数据后,经过Dechirp处理,使得数据采集和信号处理变得简单,更便于下一步分析研究;二是在对信号处理过程中,采用高通滤波、Hough变换等方法较为简单且容易实现,但是取得的效果最好,尤其是在杂波抑制中通过脉冲对消、均值滤波等方法,效果均不理想;三是特征提取中,对散射强度和距离扩展的提取分别采用了能量求和和门限判别,速度计算均值,步态频率运用Hough变换,经短时傅里叶变换获取目标微动纹理特征。方法简单,有效性高。
3 结束语
本文基于Ku波段雷达实测数据,通过理论分析和实验研究相结合的方法对雷达径向方向的人和车辆进行了多普勒和微多普勒数据处理研究。首先介绍了雷达系统以及信号处理方法,接着对实测的回波信号进行杂波抑制,利用Hough变换提取运动目标轨迹,最后从目标散射强度、距离扩展宽度、速度和步态频率四种特征对人和车辆进行了分析计算,通过对比能够快速地、较为准确地分类识别人和车辆,证明了方法的有效性。
[1]高红卫,文树梁.微多普勒理论建模与仿真研究[J].中国电子科学研究院学报,2008,3(1):34-39.GAO Hongwei,WEN Shuliang.Micro-Doppler Theory Modeling and Simulating Research[J].Iournal of China Academy of Electronics and Information Technology,2008,3(1):34-39.(in Chinese)
[2]维克托C·陈.雷达微多普勒信号特征的原理与应用[J].雷达科学与技术,2012,10(3):231-240.CHEN V C.Radar Micro-Doppler Signatures:Principle and Applications[J].Radar Science and Technology,2012,10(3):231-240.
[3]ALEMDAROGLU O T,CANDAN C,KOC S.The Extraction of Micro-Doppler Features from Human Motions[C]∥Signal Processing and Communications Applications Conference,Trabzon:IEEE,2014:726-729.
[4]RICCI R,BALLERI A.Recognition of Humans Based on Radar Micro-Doppler Shape Spectrum Features[J].IET Radar,Sonar&Navigation,2015,9(9):1216-1223.
[5]张翼.人体微动雷达特征研究[D].长沙:国防科学技术大学,2009.
[6]孙忠胜,王俊,毕严先,等.基于广义S变换的多人微多普勒特征分析[J].系统工程与电子技术,2014,36(7):1291-1297.SUN Zhongsheng,WANG Jun,BI Yanxian,et al.Analysis of Multi-Human Micro-Doppler Signatures Based on Generalized S Transform[J].Systems Engineering and Electronics,2014,36(7):1291-1297.(in Chinese)
[7]李彦兵.基于微多普勒效应的运动车辆目标分类研究[D].西安:西安电子科技大学,2013.
[8]杨磊,王勇,罗丁利.基于微多普勒特征的运动车辆分类方法研究[J].火控雷达技术,2014,43(3):36-39,58.YANG Lei,WANG Yong,LUO Dingli.Study on Moving Vehicles Classification Based on Micro-Doppler Signatures[J].Fire Control Radar Technology,2014,43(3):36-39,58.(in Chinese)
[9]RICHARDS M A.雷达信号处理基础[M].邢孟道,王彤,李真芳,等译.北京:电子工业出版社,2008.
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
科学与信息化(2021年30期)2021-12-24
北京航空航天大学学报(2021年9期)2021-11-02
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
雷达与对抗(2020年1期)2020-06-05
医学新知(2019年4期)2020-01-02
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
火控雷达技术(2016年3期)2016-02-06