机载测云雷达探测模式分析∗
2016-01-10 11:40
雷达科学与技术 2016年2期
(安徽四创电子股份有限公司,安徽合肥230088)
0 引言
工作频率在30~300 GHz(波长为10~1 mm)范围内的雷达,常称为毫米波雷达。毫米波在细微粒子中具有较强的散射特性[1],利用这一特性可以提高对云雾的探测能力,有利于提高对气象目标形成的微物理过程的认识,因此测云雷达常采用毫米波频段(例如Ka,W波段[2]),毫米波设备具有体积小、重量轻等特点。机载毫米波测云雷达以高机动的飞机作为搭载平台,直接进入试验区域实现大范围的云雾探测。
国际上,毫米波测云雷达的研制和试验已进入成熟阶段,车载和机载毫米波测云雷达均有多种型号,在技术实现上,脉冲压缩、调频连续波、多极化、双频段等技术都有应用,而且载有W波段测云雷达的卫星已于2005年送上轨道,用以测量全球云垂直分布。
近年来,我国已经研制出Ka波段、W波段测云雷达,包括固定式、车载式、机载式产品。本文根据当前国际上典型机载毫米波测云雷达技术参数,结合我国采用载机的特点,探讨机载测云雷达探测模式,并进行简单分析和说明。
1 机载测云雷达主要参数
根据我国毫米波雷达现有技术水平和研制能力,并参考国外同类雷达的工作参数,笔者认为:我国首部机载测云雷达样机宜采用全相参多普勒体制,选择国产运-7飞机为搭载平台,雷达工作频率为W波段(波长3 mm),通过发射水平极化电磁波,同时接收回波信号的水平和垂直极化分量,用以估测云反射率因子Z、线性退极化比LDR、径向速度V、谱宽W等基本参数,以便提供云分布、云的状态属性,以及云相态和云中气流分布等分析资料。
雷达系统主要技术指标暂定为:
工作频率:W波段(94~95 GHz)
探测范围:距离0.2~20 km
强度:-50~+20 d Bz
速度:-17~+17m/s(9k Hz/
6k Hz双PRF模式)
谱宽:0~8 m/s
退极化比:-5~-30d B
波束扫描:在飞行方向垂直面内作扇形扫描,扫描范围60°
扫描速度:10°/s、20°/s、40°/s、60°/s可选
天线增益:≥47 dB
波束宽度:≤0.7°
发射功率:≥1.5 k W(峰值)
脉冲宽度:0.25μs,0.5μs(可选)
重复频率:2~12 k Hz
载机飞行速度:120 m/s(典型)
飞行高度:5 000 m(典型)
2 探测模式和相关计算
2.1 波束扫描方式
国外机载测云雷达的载机最大飞行高度一般比较高,例如美国NASA(美国宇航局)的哥达德宇航中心(Goddard Space Flight Center)研制的机载W波段测云雷达系统(CRS)装载于NASA的ER-2型高空飞机上,其飞行高度可达20 km。而云的高度主要在12 km以下,因此CRS主要在云的上方向下探测。
国外机载毫米波测云雷达大多数没有波束扫描功能,但由于飞行高度较高,容易实现对高云的探测,而国内运-7飞机的飞行高度为5 km左右,对于高层云探测,需要将波束向上调整,因此雷达天线波束需具有扫描功能,对于大多数情况,可采用“侧扫”方式,雷达波束透过吊舱的侧窗向侧面发射,并上下扫描;如果需要对飞机下部的云层作重点探测,可采用“下扫”方式,雷达波束透过下窗向下发射,并作左右扫描。“侧扫”和“下扫”如图1所示。
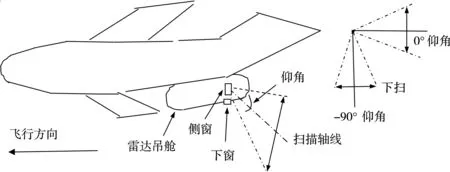
图1 波束扫描示意图
在结构设计上应该保证不论侧扫还是下扫状态,雷达波束均与飞行方向垂直,因此,飞机航行引起的多普勒频率可以忽略。
侧扫:雷达波束在飞行方向的垂直面内俯仰扫描,扫描范围-30°~+30°,扫描中心线(轴线)即为透波窗法线方向,当飞机以平稳姿态飞行时,扫描轴线平行于地面(即仰角0°)。
下扫:雷达波束在飞行方向的垂直内俯仰扫描,扫描范围-60°~-120°,当飞机以平稳姿态飞行时,扫描轴线垂直于地面(即仰角-90°)。
定向:雷达波束在飞行方向的垂直面上固定指向于仰角范围-30°~+30°内的某一位置,或-120°~-60°范围内某一位置。
2.2 相关计算和分析
1)探测幅宽和纵向间隔
图2为机载W波段测云雷达波束扫描示意图。假设工作状态是对飞机下方L处的云层左右扫描,扫描幅度为左右各30°,扫描轴线垂直向下,很显然,对于距离飞机L处,探测幅宽为

探测幅宽W与距离L对应关系如表1所示。

图2 下视探测
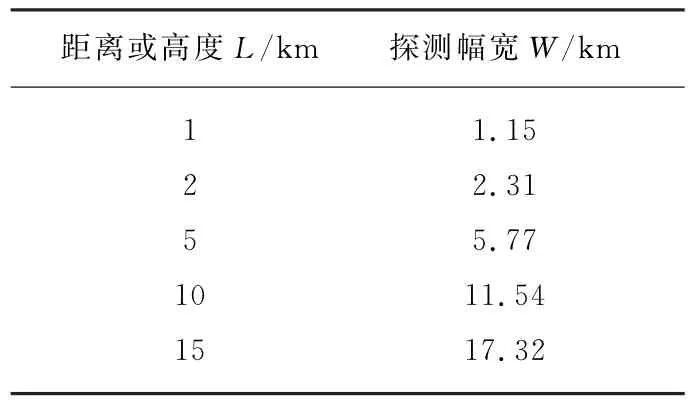
表1 探测幅宽与距离对应关系
从图2可看出,飞行探测时,波束扫描线之间的纵向间隔S与飞机飞行速度v、波束扫描速度r有关,即

假设飞行速度v=120 m/s,由上式可计算出纵向间隔S与扫描速度r之间的对应关系如表2所示。

表2 纵向间隔与扫描速度对应关系(飞行速度=120 m/s)
从表2可以看出,在飞行速度一定的情况下,波束扫描速度越快,纵向间隔S越小,也就是说在飞行方向上的探测密度越大,这当然是我们所希望的,但另一方面,随着波束扫描速度的加快,雷达波束对目标样本的照射时间变短,也就是样本回波的脉冲数变少,探测精度变差。所以在实际应用中,应根据探测要求合理选择波束扫描速度。
2)脉冲样本数(脉冲积累数设置)
气象雷达作回波信号处理时需要对目标回波的多个脉冲样本进行积累平均,以提高估值精度,例如一般天气雷达对脉冲样本积累数通常取32以上。显然对于机载测云雷达,有效的脉冲积累数不仅与波束扫描速度、雷达重复频率有关,还要受到飞机飞行速度的限制,以下根据计算数据提出对本雷达脉冲积累数的合理设置。
雷达波束扫描示意图如图3所示,假设:
雷达波束宽度0.7°,波束扫描速度0°/s(固定指向),10°/s,20°/s,40°/s,60°/s可选,飞机飞行速度典型值v=120 m/s(即430 km/h)。

图3 波束扫描示意图
假设所关注的是400 m以外的云目标,如图4所示,对于400 m处,雷达波束照射区直径为


图4 波束照射区直径
① 固定指向(波束不扫描)
当波束为固定指向时,波束驻留时间[3]为

如果取雷达重复频率为10 k Hz,当雷达波束为固定指向时,对于400 m以外的云目标,则脉冲积累数最大可设置为0.04 s×重复频率=400。表3给出了在不同重复频率时,脉冲积累数典型设置值。
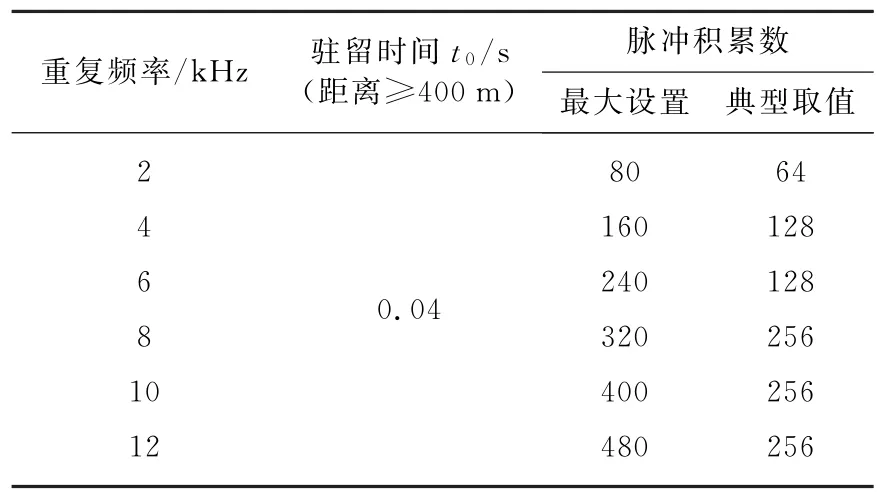
表3 脉冲积累的典型取值(波束为固定指向,飞行速度120m/s)
以上计算是针对400 m以外的云目标,对于200~400 m的近目标,显然驻留时间要短些,严格说来,脉冲积累数的设置值应该比表3数据低,因此按表3设置脉冲积累数。尽管对于400 m以内的近目标并非合理,但对于机载测云雷达来说,更为关注的应该是400 m以外或更远处的云目标,因此按表3设置脉冲积累数是可以接受的。
② 扇扫(±30°侧扫或下扫)
如果假设飞机在空中是静止的(飞行速度为0),在这种“理想”情况下,波束扫描过程中对点目标驻留时间仅取决于波束扫描速度,即驻留时间t1≈波束宽度/扫描速度,如表4所示。

表4 波束驻留时间(假设飞机静止,波束±30°扇扫)
表4是假设飞机飞行速度为0(空中静止)的情况,实际上飞机是以120 m/s速度在飞行中,因此实际驻留时间应该比表4的短。综合表3和表4数据,可以近似认为:当飞行速度为120 m/s,在扇扫(±30°)情况下,各种扫描速度下驻留时间近似值如表5所示。
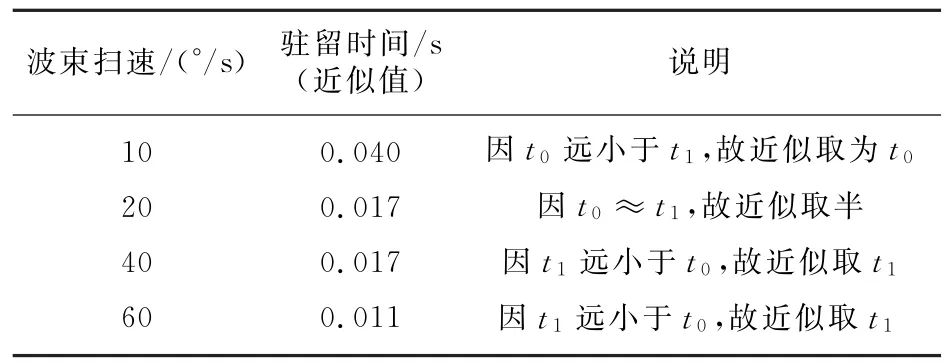
表5 波束驻留时间(飞机速度120m/s,波束±30°扇扫)
通过以上对驻留时间计算和分析,机载测云雷达信号处理器在脉冲积累数设置上可以参考表6进行。
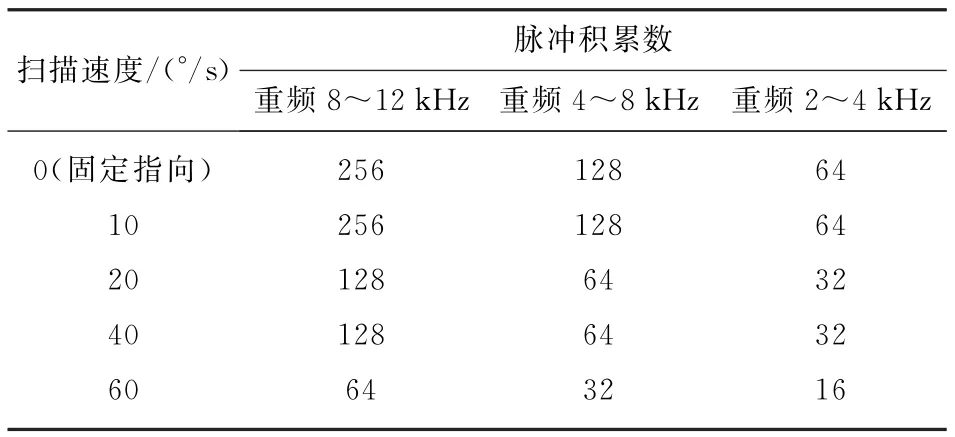
表6 脉冲积累数典型设置
2.3 典型探测模式
根据云目标分布特性,机载测云雷达探测模式[4]主要有以下两种。
1)探测模式—侧扫
主要是针对运-7飞机飞行高度以上的云探测,例如高积云、卷云、卷积云等,如图5所示。重点关注云的分布,探测要素主要是云反射率和线性退极化比、径向速度和谱宽。采用宽脉冲(0.5μs)发射,以提高灵敏度。为保证20 km探测范围,雷达重复频率相对较低,一般在6 k Hz以下。
雷达系统工作参数典型配置如下:
重复频率:6 k Hz(不模糊测速范围:±4.7 m/s)
脉冲宽度:0.5μs
波束扫描范围:±30°
扫描速度:40°/s(扫描速度可选或定向)
脉冲积累数:64
在飞行探测试验过程当中,在侧扫模式下采用了定向和扫描两种探测方式来探测云反射率和线性退极化比、径向速度和谱宽,取得的飞行探测数据基本验证了本文对典型探测模式的分析是基本正确的,飞行探测数据[5]如图6和图7所示。
2)探测模式—下扫
下扫主要是针对运-7飞机飞行高度以下的云探测,如雨层云、积雨云等。由于载机飞行高度在5 000 m左右,因此对中低云探测可采用下扫方式,如图8所示,这种探测模式对探测云内上升、下沉气流区比较有利,由于探测距离并不大,因此可选用较高的重复频率,脉冲宽度采用0.5μs,雷达系统工作参数典型配置如下:
重复频率:1 2 k H z(不模糊测速范围:±9.5 m/s)
脉冲宽度:0.5μs
波束扫描范围:±30°
扫描速度:40°/s(速度可选或定向)
脉冲积累数:128
在飞行探测试验过程当中,在下扫模式时采用了定向探测方式来探测云反射率和线性退极化比、径向速度和谱宽,取得的飞行探测数据基本验证了本文对典型探测模式分析是基本正确的,飞行探测数据如图9所示。
以上给出了两种典型的探测模式,每种模式都对雷达系统工作参数作出了明确规定,但在试验中为便于比较,还可能需要选择其他参数,具体参数匹配原则可参考表6。

图6 探测模式:侧扫定向方式
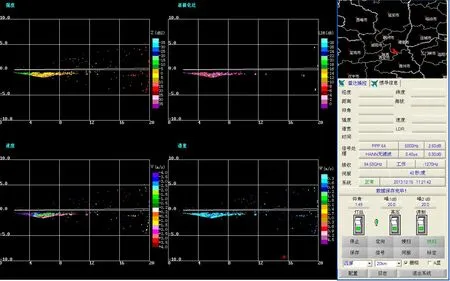
图7 探测模式:侧扫扫描方式

图8 探测模式—下扫
3 结束语
以上分析中没有考虑地形变化、天线旁瓣引起的地物回波等因素,实际上,在确定机载多普勒探测模式时(重复周期、脉冲积累数、扫描速度等),还应考虑飞机抖动、姿态变化等因素对探测效果的影响,因此雷达最佳探测模式需要综合多种因素进行调整,本文提出的探测模式仅供相关人员参考。

图9 探测模式:下扫定向方式
[1]向敬成,张明友.毫米波雷达及其应用[M].北京:国防工业出版社,2005:29.
[2]SKOLNIK M I.雷达手册[M].2版.南京电子技术研究所,译.北京:电子工业出版社,2003:12-14.
[3]张培昌,杜秉玉,戴铁丕.雷达气象学[M].北京:气象出版社,2001:159.
[4]苏涛,高仲辉,黄兴玉.94 GHz机载测云雷达总体技术研究[J].雷达科学与技术,2013,11(6):574-577,582.SU Tao,GAO Zhonghui,HUANG Xingyu.Research on Airborne Cloud Radar System[J].Radar Science and Technology,2013,11(6):574-577,582.(in Chinese)
[5]高仲辉,黄兴玉,魏鸣,等.机载W波段双线偏振测云雷达回波分析[J].雷达科学与技术,2014,12(5):561-568.GAO Zhonghui,HUANG Xingyu,WEI Ming,et al.Analysis of Cloud Echo Observed by Airborne W-Band Dual-Linear Polarization Cloud Radar[J].Radar Science and Technology,2014,12(5):561-568.(in Chinese)
猜你喜欢
信息通信技术(2022年2期)2022-05-31
热带作物学报(2021年1期)2021-02-22
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
舰船科学技术(2020年3期)2020-04-22
无人机(2019年10期)2019-12-17
科技信息·中旬刊(2018年9期)2018-10-21
航空模型(2016年10期)2017-05-09
航空模型(2016年5期)2016-07-25
百科探秘·航空航天(2015年12期)2015-11-07