
重构杂波加噪声相关矩阵的SAR-GMTI动目标径向速度估计方法
2015-12-31 11:56王帆,徐敏
上海航天 2015年4期
王 帆,徐 敏
(1.北京航空航天大学 电子工程学院,北京 100191;2.上海卫星工程研究所,上海 200240)
0 引言
近十年来,SAR对地成像技术发展迅速,不仅能全天时、全天候地遂行对地高分辨率宽覆盖成像侦察任务,而且具备地面动目标检测(GMTI)的能力,在军事和民用领域发挥了不可替代的作用。由于目标运动使目标和卫星间的相对运动关系发生了变化,运动目标的多普勒历程与静止的背景目标不同。成像聚焦过程是沿静止目标的多普勒历程进行能量汇聚,导致运动目标无法精确聚焦和定位,因此为保证精确地获取目标的地理坐标位置,首先需估计目标的运动参数,尤其是目标的径向速度[1]。目前,星载SAR动目标检测方法主要可分为单通道检测方法、多通道检测方法和双星双波束检测方法三类[2-15]。其中:单通道检测方法利用了回波信号的多普勒特性或统计特性,但这类方法受杂波和多普勒参数估计精度的影响较大,难以精确估计目标运动参数;多通道方法利用多个通道接收的数据,完成背景杂波的抑制,保留运动目标的信息,通过对幅值和相位的反演获取目标的运动速度信息,这类方法检测和估计精度有所提升,但同样受杂波影响;双星双波束检测是最新出现的一种方法,利用数字波束形成技术沿方位向形成两个波束,从而在一定时间范围内先后获取同一区域的图像,通过对比分析序贯图像间的差异性完成运动目标的检测和参数估计。
当前星载SAR-GMTI中相对成熟的方法是多通道方法。利用多通道SAR-GMTI系统,通过杂波对消技术或自适应匹配滤波(AMF)方法可有效抑制杂波、提升杂噪比[6-14]。但因待检测单元杂波特性无法获得,故常将运动目标附近的背景杂波作为待检测单元的杂波。当地面场景不均匀时,背景杂波无法精确反映待检测单元的杂波特性,此时速度估计性能会下降。针对上述问题,本文对一种基于待检测单元数据重构杂波与噪声相关矩阵,自适应抑制待检测单元杂波,用AMF代价函数估计运动目标径向参数的方法进行了研究。
1 回波信号建模
星载SAR-GMTI系统多采用方位一发多收的工作体制,如加拿大的RadarSat-2卫星。不失一般性,假设星载SAR系统沿方位向有M个接收通道,通道间的相位中心间距为l1,l2,…,lM-1,如图1所示。
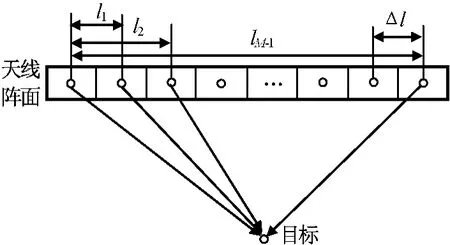
图1 SAR-GMTI通道Fig.1 Channel of SAR-GMTI
采用这种工作方式,每个接收通道都可获取一组数据,即在一次成像过程中可获得回波信号M组。因动目标检测模式分辨率不高,故可用经典成像处理算法分别对每组回波数据进行成像聚焦处理,获取图像M幅。在较短的成像时间内,可认为场景特性不变,因此假设M幅图像各像素点间具有相同的分布特性,且相互独立,此时同一目标在M幅图像中的像素点的矢量可表示为
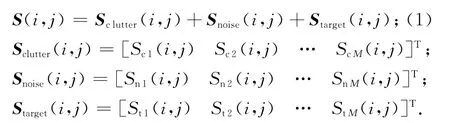
式中:i,j分别为距离向和方位向的像素坐标;Sclutter(i,j)为背景杂波;Snoise(i,j)为噪声信号,服从高斯分布;Starget(i,j)为运动目标信号。
根据通道运动目标检测的原理,静止目标在每幅SAR图像中的特性相同,而对存在径向速度的运动目标,由于径向运动,使其在不同通道间存在一相位差

式中:vr为动目标径向速度;λ为雷达波长;va为卫星运动速度;Δl为接收通道间隔。因此,当目标存在径向运动速度时,其信号可表示为

式中:σc(i,j)为背景杂波信号的后向散射系数矢量;σi(i,j)为运动目标的后向散射系数矢量;C(vc)为背景杂波信号的空间变化矢量;ΔΦ(vr)为运动目标的空间变化矢量,且

2 径向速度估计
通常,认为背景杂波信号的后向散射系数矢量和回波信号的后向散射系数矢量近似相等。在此基础上,用AMF法计算动目标径向速度,有

式中:H(vr)=Y-1Δ(vr);TD为待检测的动目标数据。此处:Y为假设无运动目标时获得的相关矩阵估计。
AMF在处理均匀杂波时具有较好的效果,但在处理非均匀杂波时,相关矩阵Y与待检测单位杂波能量不匹配,这将影响其速度估计精度。对此,本文提出用重构的待检测单元杂波加噪声相关矩阵的匹配滤波方法(RAMF),以在非均匀背景杂波条件下获取较好的检测性能。
根据匹配滤波的方法对待检测单元的功率谱进行初步估计


进一步用功率谱构造待检测单位数据的相关矩阵

将结果代入对待检测单元功率谱进行修正,有

对上述操作进行迭代处理可完成待检测单元功率谱的精确估计。
根据背景杂波对杂波干涉相位θc进行估计,构造杂波加噪声相关矩阵

式中:为噪声能量;为估计的杂波能量;I为单位阵。
最后,将构造的杂波加噪声相关矩阵代入式(5),即可在非均匀杂波条件下对运动目标的速度进行精确的估计。
3 仿真实验验证
以星载SAR三通道系统为例进行全数字仿真试验。设仿真参数为:卫星平台速度7km/s,通道间隔3.5m,工作波长0.03m,背景大小50×50;待检测单元杂噪比30dB,信杂比0dB,杂波干涉相位18°。
为验证本文方法在处理非均匀杂波条件下动目标检测性能的优势,分别分析背景杂波与待检测单元杂波能量匹配、背景杂波能量小于待检测单元杂波能量,以及背景杂波能量大于待检测单位杂波能量三种情况下,传统AMF方法与本文RAMF方法性能。
令近分辨单元杂波数据独立同分布,背景杂波与待检测单元杂波能量匹配条件下,RAMF,AMF方法的测速精度及输出信杂噪比仿真结果如图2所示。由图可知:当背景杂波能量与待检测单元杂波能量匹配时,RAMF,AMF的测速性能及输出信杂噪比基本相同,两种方法都具有较好的速度检测能力。

图2 背景杂波能量与待检测单元杂波能量匹配时仿真结果Fig.2 Simulation results for background clutter energy matched with CUT clutter energy
背景杂波能量小于待检测单元杂波能量(背景杂波能量10dB,待检测单元杂波能量30dB)时,RAMF,AMF方法的测速精度和输出信杂噪比仿真结果如图3所示。由图可知:背景杂波能量小于待检测单元杂波能量匹配时,RAMF输出信杂噪比优于AMF方法,说明RAMF具有更好的杂波抑制效果,而AMF方法对待检测单元杂波的抑制能力不足,同时AMF方法对慢速目标运动参数的估计精度也劣于本文的RAMF方法。
背景杂波能量大于待检测单元杂波能量(背景杂波能量50dB,待检测单元杂波能量30dB)时,RAMF,AMF方法的测速精度和输出信杂噪比的仿真结果如图4所示。由图可知:当背景能量强时,AMF,RAMF方法均能有效抑制待检测单元的杂波,两种方法的速度测量精度相近。
4 结束语
本文对重构杂波加噪声相关矩阵的SARGMTI动目标径向速度估计方法进行了研究。通过构造杂波加噪声相关矩阵的径向速度估计方法(RAMF),克服了非均匀杂波条件下待检测单元杂波能量估计不精确对动目标速度估计精度的影响。全数字仿真结果证明:本文提出的动目标径向速度估计方法可修正能量失配问题,在背景杂波与待检测单元能量失配严重情况下仍可获得较高的动目标估计精度。

图3 背景杂波能量小于待检测单元杂波能量时仿真结果Fig.3 Simulation results for background clutter energy smaller than CUT clutter energy

图4 背景杂波能量大于待检测单元杂波能量时仿真结果Fig.4 Simulation results for background clutter energy larger than CUT clutter energy
[1] MARINA V D,BURWASH W,CHIU S.Detection and estimation with RADARSAT-2moving-object detection experiment modes[J].IEEE Transactions on Geoscience and Remote Sensing,2012(99):1-17.
[2] RANEY R K.Synthetic aperture imaging radar and moving target[J].IEEE Transactions on Aerospace and Electronic Systems,1971,7(3):499-505.
[3] MOREIRA J R,KEYDEL W.A new MTI-SAR approach using the reflectivity displacement method[J].IEEE Trans on GRS,1995,33(5):1238-1244.
[4] KIRSCHT M.Detection and imaging of arbitrarily moving targets with single-sensor SAR[J].IEE Proceedings-Radar Sonar & Navigation,2003,150(1):7-11.
[5] LI Gang,XIA Xiang,XU Jia,et al.A velocity estimation algorithm of moving targets using single antenna SAR[J].IEEE Trans on Aerospace and Electronic Systems,2009,45(3):1052-1062.
[6] ENDER J H G.Space-time processing for multichannel synthetic aperture radar[J].Electronics & Communication Engineering Journal,1999,11(1):29-38.
[7] De GREVE S,RIES P,LAPIERRE F D,et al.Verly,framework and taxonomy for radar space-time adaptive processing(STAP)methods[J].IEEE Trans on Aerospace and Electronic Systems,2007,43(3):1084-1099.
[8] ZHU Xu-min,LI Jian.Knowledge-aided space-time adaptive processing[J].IEEE Trans on Aerospace and Electronic Systems,2011,47(2):1325-1336.
[9] MOTAHARI S M A,DENG Hai.Clutter rejection processing for airborne radar in rotated space-time domain[C]//IEEE Antennas and Propagation Society International Symposium.[s.l.]:IEEE,2012:1-2.
[10] 杜文韬,廖桂生,杨志伟.一种功率修正的多频空时数据自适应处理方法[J].电子与信息学报,2012年,34(10):2470-2474.
[11] ROBEY F C,FUHRMANN D R,KELLY E J,et al.A CFAR adaptice mathed filter detector[J].IEEE Trans Aerosp Electron System,1992,28(1):208-216.
[12] SHU Yu-xiang,LIAO Gui-sheng,YANG Zhi-wei.Target Radial velocity estimation based on data reconstruction and signal fitting:Asia-Pacific Conference on Synthetic Aperture Radar[C].Seoul:2011.
[13] SHU Yu-xiang,LIAO Gui-sheng,YANG Zhi-wei.Robust radial velocity estimation of moving targets based on adaptive data reconstruction and subspace projection algorithm[J].IEEE Geoscience and Remote Sensing Letters,2014,11(6):1101-1105.
[14] 束宇翔,廖桂生,杨志伟.维纳滤波最优权修正导向矢量的SAR-GMTI动目标径向速度估计方法[J].电子学报,2011,39(9):1986-1991.
[15] MITTERMAYER J,WOLLSTADT S,PRATS P,et al.Bidirectional SAR imaging mode[J].IEEE Transactions on Geoscience and Remote Sensing,2013,51(1):601-614.
猜你喜欢
汽车工程师(2021年12期)2022-01-17
科学与信息化(2021年30期)2021-12-24
当代陕西(2020年14期)2021-01-08
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
奥秘(创新大赛)(2020年7期)2020-07-27
雷达与对抗(2020年1期)2020-06-05
农家科技中旬版(2018年7期)2018-09-25
航空兵器(2017年6期)2018-01-24
农业与技术(2016年24期)2017-04-20
