
三相四开关并联型有源电力滤波器控制策略研究
2015-12-29 05:08陈弘哲齐虹陈冲陈东毅卢冠达
福州大学学报(自然科学版) 2015年1期
陈弘哲,齐虹,陈冲,陈东毅,卢冠达
(福州大学电气工程与自动化学院,福建福州 350116)
0 引言
由于非线性电力负荷的广泛应用,非线性负载产生的谐波电流注入电网,影响电力系统安全和电能质量,增加了电网损耗,同时对其它用电设备也造成了干扰.有源电力滤波器(active power filter,APF)在传统的谐波治理装置中被认为是谐波治理、无功补偿、改善电能质量最有效的装置之一[1].本研究将三相四开关逆变器运用于APF中,由于电力开关管的减少,有效降低APF的成本,简化了APF中驱动电路的控制算法,具有较高的研究与实际应用价值.
通过研究三相四开关并联型有源电力滤波器(three-phase four-switch shunt active power filter,TFSSAPF)的拓扑结构,分析四开关逆变器输出三相对称电压的基本工作原理.在传统三相四开关逆变器SVPWM调制算法的基础上,通过逆时针旋转坐标轴120°的方式使基本输出电压空间矢量与α、β坐标轴重合,简化了参考电压矢量的扇区判断和合成参考电压矢量的相邻两个矢量作用时间计算量.四开关逆变器只有四种不同的开关状态,因此对应4个基本电压矢量,缺少零矢量,文献[2]通过施加2个相反方向电压矢量U0与U2作用相同时间内来等效零矢量的作用,依靠构成零矢量的U0和U2两个向量来平均分配一个周期内的剩余时间,解决了四开关SVPWM算法中没有零矢量的问题.文献[3]采用的是五段式SVPWM调制算法,在一个调制周期内,同一个桥臂上的电力开关管开关2次,电力开关管频繁开断会导致电力开关管损耗变大.将七段式SVPWM调制算法运用于TFSSAPF,有效地减少电力开关管的开关次数,降低电网中负载电流的畸变率.文献[4]将广义比例积分控制器和重复控制器运用于APF上,重复控制器有效抑制了周期性的谐波,而广义比例积分控制器能够快速响应与控制较大电流误差,最终实现了输出电流补偿信号能够无差地实时跟踪参考电流信号.本研究将比例积分控制与快速重复控制并联的控制系统,充分发挥比例积分控制器与快速重复控制器的各自优点,可以同时消除系统稳态误差和改善系统稳定性,提高了TFSSAPF的补偿效果,有效降低负载电流的畸变率.
1 TFSSAPF的电路拓扑结构分析
所研究的TFSSAPF的电路拓扑结构如图1所示.其中,三相四开关APF和三相六开关APF的主要区别在于减少了C相这一对电力开关管和续流二极管,直流侧由两个等值的电容组成,并且C相直接接到两电容之间[5].


图1 TFSSAPF电路拓扑结构Fig.1 TFSSAPF circuit topology
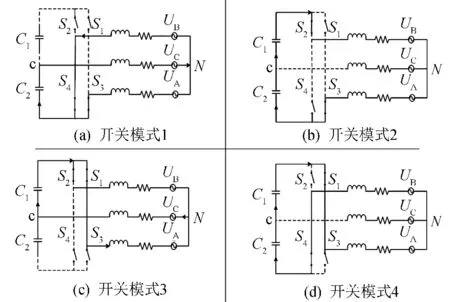
图2 四种开关模式Fig.2 Four kinds of switch - mode

表1 四种开关模式下的电压值Tab.1 Voltage value in four switch mode
常规的六开关逆变器的8种开关状态形成6个非零矢量和2个零矢量,可通过施加零矢量来补足时间T0.但是三相四开关并联型APF的C相始终与逆变器直流侧的两个电容的中点相连,无法对其进行开关控制[5].所以三相四开关逆变器不能采用传统的三相六开关逆变器SVPWM调制算法.
2 TFSSAPF的空间矢量分析
为使TFSSAPF的空间矢量分析更加方便,不考虑直流侧电容电压脉动的情况,恒为UC1=UC2=Udc/2.每相桥臂的开关器件均为理想的电力开关管.
以往的三相四开关逆变器的SVPWM调制算法,就是把三相的相电压经过传统clark变换成如图3的电压空间矢量分布图.

如果利用传统的clark变换得出参考电压矢量,通过选取3或4个基本矢量等组合方式来合成参考电压矢量,这就要求分别求出4个基本矢量所作用的时间,再对SVPWM中的扇区判断和合成参考电压矢量的3个矢量的作用时间进行计算.这些运算涉及到大量无理数和三角函数运算,运算量较大,影响整个控制电路的控制效果[6-7].
由于从图3和公式(1)可以计算出U1与α轴存在120°夹角,通过坐标旋转公式(2)对原来空间电压矢量的坐标逆时针旋转120°,使U1与α轴重合(图4).这样扇区的判断只需要判断U'α和U'β的正负性即可判断出扇区,减少了求解相邻矢量作用时间的运算量.

与三相六开关逆变器的基本电压空间矢量相比较,由图4和表2可知:
1)三相四开关逆变器在α,β平面上有4个相角差90°的基本电压空间矢量,不存在零矢量;
3)U1与U3模值相等且方向相反,U2与U4也具有相同的关系.
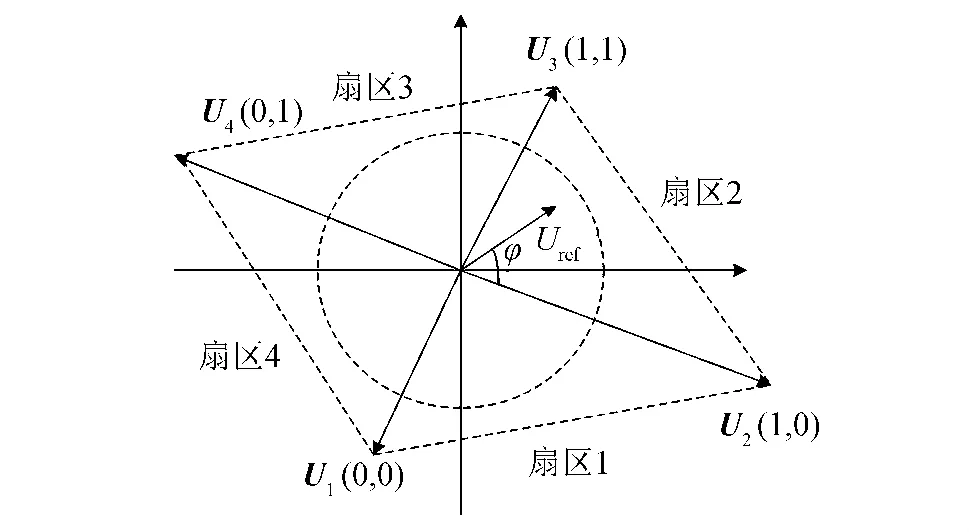
图3 传统的电压空间矢量分布图Fig.3 Traditional voltage space vector maps

图4 坐标旋转120°的电压空间矢量分布图Fig.4 Voltage space vector maps after coordinate rotation of 120°

表2 坐标旋转120°的基本电压空间矢量与开关模式对应表Tab.2 The basic voltage space vector in corresponding switch mode after coordinate rotation of 120°
3 TFSSAPF的SVPWM调制算法
传统的扇区判断方法是构造t13=t1-t3和t24=t2- t4,其中,t1,t2,t3,t4(t1+t2+t3+t4=Ts)分别表示每个基本电压矢量作用时间,通过判断t13和t24的正负性来判断参考矢量所处的扇区,这种方法求出t1,t2,t3,t4的运算较为复杂,带来较大的运算量[8-10].
通过坐标旋转后,只需判断U'α和U'β的正负性即可判断出扇区,如表3所示.假设Uref位于第二扇区,便可以用与之相邻的U1和U2来合成,U1和U2作用时间可以分别表示为:

表3 坐标旋转后的电压空间矢量扇区的判断方法Tab.3 The determination of voltage space vector sector after coordinate rotation

当Uref位于图4中其他扇区时,可以按照同样的分析方法,依次求出各个扇区所对应的T0、T1、T2.三相四开关逆变器中不存在零矢量,因此可以利用2个相反方向电压矢量通过作用相同的时间来等效零矢量的作用.一般情况下,选用模值最小的2个电压空间矢量去合成零矢量,因此,选用U1与U3作用相同时间来替代等效的零矢量作用.
传统的“五段式”四开关SVPWM算法在一个调制周期内,同一桥臂上电力开关管的开关状态通常要开关2次,这样会导致四开关逆变器中的电力开关管频繁开断,电力开关管频繁开断会使电力开关管损耗增大,缩短了电力开关管的使用年限,可能会带来谐波的影响.“七段式”SVPWM开关模式的分配原则:在一个调制周期中,以U0开始并以其结束;同一桥臂上电力开关管的开关状态只开关1次,将两个特定的矢量的作用时间平均分成两部分,从而产生对称的PWM波形,所以得到每一扇区内“七段式”四开关 SVPWM波形如图5表示.从上述的“七段式”SVPWM开关模式中,一个调制周期内,同一桥臂上电力开关管只开关一次的原则上看,能够有效地减少电力开关管的开关次数,降低了电力开关管的开关损耗.
综上所述,经过TFSSAPF的检测环节可以检测出电网中需补偿的谐波电流,经过上述的七段式SVPWM调制算法,可以使三相四开关逆变器产生需补偿的反相的三相谐波电流,并注入电网以达到消除谐波的目的.

图5 四开关七段式SVPWM波形图Fig.5 Seven - segment SVPWM waveform diagram
4 指令电流控制系统的设计
PI控制器保证系统输出能够无差地跟踪给定信号,传统PI控制传递函数如式(4)所示.

式中:Kp为PI控制器的增益系数,KI为积分常数.当参考信号为直流信号时,PI控制器才能保证系统无稳态误差;如果参考信号为周期信号时,PI控制器就不能起作用了[11].
重复控制能够更好地消除系统中存在的周期性误差,能对扰动的谐波进行逐次抑制.因为电力系统非线性负载电流中主要以奇数次谐波的形式存在,这样才能达到消除系统中的谐波分量的效果[12-13].
采用快速重复控制周期缩短为原来市电周期的三分之一,即T/3(传统重复控制器的控制周期一般为一个市电周期T),具有更好的动态响应能力.快速重复控制器的脉冲传递函数为:

将式(4)和式(5)两个控制器并联后的传递函数表达式为:

图6为只采用PI控制器的指令电流控制系统的开环幅频特性图,图7为采用两种控制器并联的指令电流控制系统的开环伯德图.其中,图6与图7中的PI控制器的参数完全一致.从图7可以看出,加入PI控制器与快速重复控制器并联组成的指令电流控制系统有效地增大了开环传递函数的幅值增益,在低频处就能使谐波控制系统中相角裕度迅速增加,保证了在基频以及高频处相角均保持正值,从而保证了控制器的稳定性[14].

图6 采用PI控制器的指令电流控制系统开环伯德图Fig.6 Bode chart of instruction current control system in open-loop with PI controller

图7 两种控制器并联的指令电流控制系统开环伯德图Fig.7 Bode chart of instruction current control system in open-loop with two controllers in parallel
TFSSAPF系统的单相电流控制对象的传递函数为:


将PI控制器和重复控制器组成指令电流控制系统连接到系统控制部分的预测指令电流信号输出端的位置,由式(6)和(7)可知,加入指令电流控制系统后,谐波电流控制系统的开环传递函数为:

对式(8)中的参数,取 Kp=50、KI=0.01、Kpwm=100、τs=0.05 ms、R=0.1 Ω、L=5 mH、Kf=0.04.经以上分析,PI控制器和快速重复控制器的并联控制原理框图如图8所示.
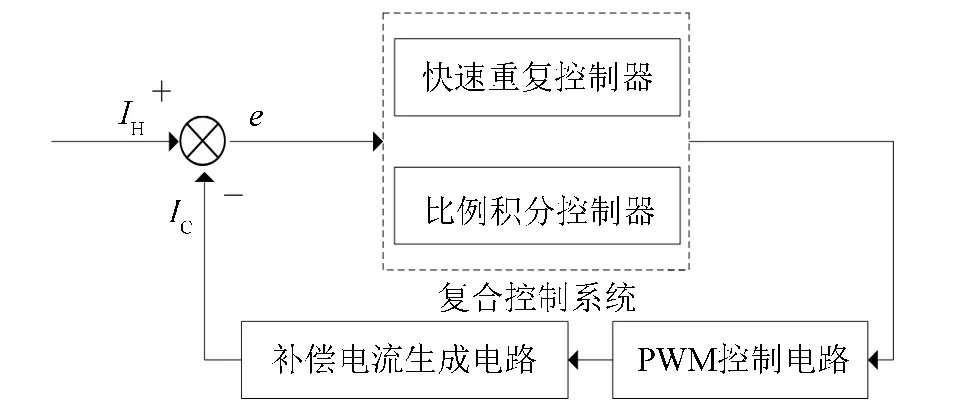
图8 指令电流控制系统的原理图Fig.8 The instruction current control system schematic
5 仿真分析
通过Matlab7.0对所提出的TFSSAPF七段式SVPWM调制算法的正确性进行了仿真分析,并通过所设计的指令电流控制系统与单纯采用PI控制器作为指令电流控制系统的情况进行了对比分析,验证了所设计的指令电流控制系统的有效性,其中两者的PI参数完全一致.具体的仿真参数如下:三相独立电源中每一相的电压有效值为220 V,频率为50 Hz;补偿电流输出电路的滤波电阻和电感分别为R=0.1Ω,L=5 mH;三相负载为三相不可控整流桥,整流桥连接电感值为20 mH,电阻值为50Ω的负载;直流侧电压设定值为Udc=1 500 V,直流侧电容C1=C2=250μF;电力开关管为IGBT,其开关频率10 kHz.

图9 治理前的负载电流傅里叶分析图Fig.9 Fourier analysis chart of the ungoverned load current

图10 未采用指令电流控制系统治理后的负载电流傅里叶分析图Fig.10 Fourier analysis chart of the governed load current without instruction current control system

图11 指令电流控制系统采用PI控制器治理后的负载电流傅里叶分析图Fig.11 Fourier analysis chart of the governed load current with PI controller in instruction current control system

图12 采用所设计的指令电流控制系统治理后的负载电流傅里叶分析图Fig.12 Fourier analysis chart of the governed load current with the designed instruction current control system in this paper
图9为治理前A相的负载电流波形图,对A相负载电流进行傅里叶分析,其中,5、7和11次谐波含量较高,A相的负载电流总畸变率THD达到28.87%,不满足国家电网的要求.图10为治理后未加指令电流控制系统的负载电流傅里叶分析图,虽然TFSSAPF初步达到治理谐波的目标,但是效果不理想,其中,5、11次谐波含量较高,A相负载电流总畸变率仍然高达9.98%,未达到国家标准要求的5%以内.图11为仅采用PI控制器作为指令电流控制系统的治理后A相的负载电流傅里叶分析图.虽然A相负载电流总畸变率降低到7.62%,但是3、7次谐波含量较高,仍然不能满足国家标准.图12为治理后加入指令电流控制系统的A相的负载电流傅里叶分析图.从图中可看出治理后的A相负载电流的3、5、7和11次谐波含量明显降低,负载电流总畸变率THD降低到3.13%,最终达到国家标准中对电网电流THD低于5%的要求,说明基于重复控制器设计的指令电流控制系统能够有效地消除周期性干扰,提高了TFSSAPF的补偿效果.
6 结语
采用七段式SVPWM调制算法和指令电流控制系统应用于TFSSAPF,与传统的三相六开关并联型APF相比,研究结果表明:
1)采用三相四开关逆变器设计的TFSSAPF能够达到补偿电网中谐波电流的效果.与传统的三相六开关逆变器相比,少一个电力开关器件桥臂,其中C相直接与直流母线串联两个电容的中点相连接.由于少了一个桥臂的电力开关管和续流二极管,因此可以有效的降低APF的成本.
2)将改进后的七段式SVPWM调制算法运用于TFSSAPF中,通过旋转坐标的方法简化了参考电压矢量的扇区判断和合成参考电压矢量的相邻两个矢量的作用时间的计算.采用七段式调制方式可以有效地降低开关器件的开关频率,降低负载电流的畸变率.
3)所设计的指令电流控制系统,当TFSSAPF稳态运行时,指令电流控制系统中的快速重复控制器起主要作用,可以有效抑制周期性谐波;当TFSSAPF载荷突变时,PI控制器实现对变化较大电流误差的快速响应与控制,从而实现谐波指令电流的无静差跟踪控制.通过仿真分析可知,TFFSAPF加入指令电流控制系统后能有效抑制3、5、7和11次谐波,降低电网电流的畸变率.
猜你喜欢
南北桥(2022年2期)2022-05-31
中学生数理化·高一版(2021年11期)2021-09-05
哈尔滨铁道科技(2020年4期)2020-07-22
电脑知识与技术·经验技巧(2017年9期)2018-02-24
西南交通大学学报(2016年4期)2016-06-15
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
计算机技术与发展(2016年10期)2016-02-27
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年14期)2014-04-04
