
卷积混合的频域盲解卷积法诊断转子故障
2015-12-28 06:40:28李本威宋汉强杨笑冬
噪声与振动控制 2015年1期
韦 祥,李本威,赵 勇,宋汉强,杨笑冬
(1.海军航空工程学院 研究生管理大队,山东 烟台 264001;2.海军航空兵学院 92925部队修理厂,山西 长治 046000)
卷积混合的频域盲解卷积法诊断转子故障
韦 祥1,李本威1,赵 勇1,宋汉强1,杨笑冬2
(1.海军航空工程学院 研究生管理大队,山东 烟台 264001;2.海军航空兵学院 92925部队修理厂,山西 长治 046000)
针对转子系统偏心、不对中及碰磨引起的耦合故障,采用卷积混合的频域盲源分离转子故障诊断方法。在利用转子实验台模拟转子系统偏心、偏心—碰磨耦合故障的基础上,通过频域盲解卷方法对耦合故障的观测信号进行分离,并对分离后的源信号进行FFT分析,从而实现转子系统复杂耦合故障的精确定位与诊断。仿真实验初步验证了算法的有效性,分离波形和二次残差(VQM)均证实了该算法能较好实现混合信号分离。同时,转子系统故障诊断实例结果表明:该方法在成功诊断出偏心故障与碰磨故障的同时还能诊断出不对中、轴承松动的故障,提高了故障诊断的精确性。
振动与波;故障诊断;频域盲解卷积法;转子偏心;不对中
转子系统作为旋转机械的核心部件,常伴随有质量偏心、不对中及碰磨等故障模式。机械系统的失效一般不会是单一故障所引起,而是由多种故障耦合而成。通常,耦合故障的动力学特性比较复杂,对其进行精确的故障定位与诊断也比单一故障情形难度大的多。而目前对于转子系统故障诊断的方法大部分是对于单一故障进行的[1]。因此,开展耦合故障模式下机械系统的故障诊断极其重要。
盲源分离作为计算智能学的核心研究内容,是人工神经网络、统计信号处理、信息理论相结合的产物,近年来成为一些领域研究与发展的重要课题[2]。在旋转机械故障诊断领域,国内外许多学者都对其应用效果进行了研究。在国外,Capdevielle V等人最早提出了频域盲源分离的算法,并对实测转子信号进行盲解卷,提出了机械故障诊断的新方法[3]。G.Gelle和M.Colas等人对盲源分离方法能否用于旋转机械振动分析进行了研究,并通过频域卷积盲源分离成功实现了双转子振动信号的分离[4]。在国内,李顺酩用时域卷积瞬态混叠模型对实际机械振动信号进行源信号的盲分离[5]。刘婷婷等人针对机械振动信号的卷积混合进行盲解卷,指出卷积模型更适合于实际振动模型,并对有裂纹的轴承转子系统进行了故障诊断[6]。
目前,盲解卷技术在机械故障诊断领域的研究主要集中在时域线性或者卷积混合,罕有频域盲分离故障诊断技术。且实际机械信号通常展现出非平稳性和非线性[7,8]。文献[9]指出:时域内的卷积混合模型对应着频域的线性瞬时混合模型,并且在频域处理更高效并更容易收敛。为了提高盲分离在实测振动信号中的分离效果,本文拟采用频域盲解卷的方法,对转子系统模拟故障信号进行处理,以期实现对耦合故障信号的分离,提高故障诊断的精确性。
1 频域盲解卷原理
1.1 频域盲解卷的基本概念
盲源分离是指在未知源信号及传输通道特性的情况下,根据源信号的统计特性,仅由观测信号恢复、分离源信号的过程。按照信号混合方式可以分为:线性瞬时混合、卷积混合与非线性混合。按照分解域而言可以分为时域与频域盲解卷。对卷积混合信号进行分离通常称为解卷积[10]。
1.2 机械振动信号卷积的数学模型
在实测旋转机械振动信号中,各个振源传到传感器的路径有多条,且在传播过程中存在着散射、混响、滤波以及耦合等诸多效应作用,通常传到传感器的信号是各振源的卷积混合。振动信号的每一条传播途径可以看作一个线性滤波器,从振动源经过不同线性滤波器后形成传感器输出阵列,其传播原理如图1。
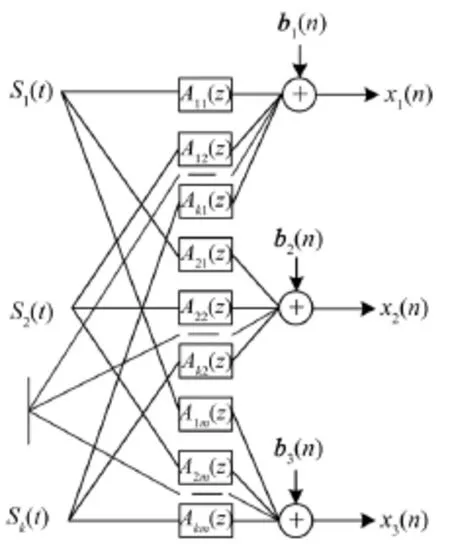
图1 噪声情况下的卷积混合模型
卷积混合模型的一般表达形式如下

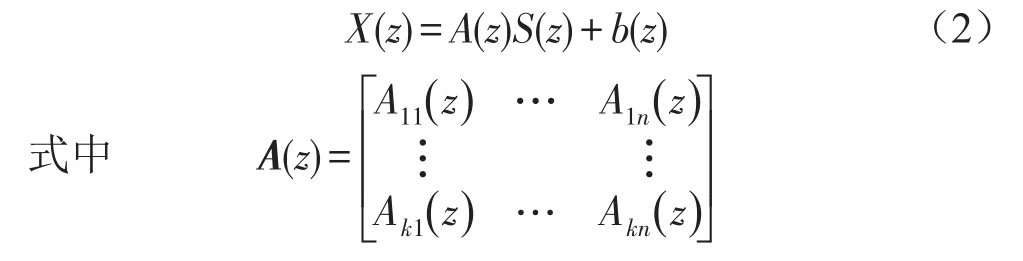
式中X(t)代表观测信号,S(t)代表源信号,A(t)代表混合矩阵,b(t)代表噪声矩阵,⊗代表卷积运算。对(1)式进行Z变换可得

1.3 频域盲解卷数学模型
(1)将卷积混合的信号进行短时傅里叶变换

式中t代表窗函数的位置。将(3)式代入(1)式可得

由于实测信号前处理都会进行降噪处理,因而本文不考虑噪声的影响,则(4)式变为

(2)在各个频段内进行相互独立的运算:
固定信号X(t,f)的频率,可表示为

本文采用扩展联合对角化方法求取观测信号的白化矩阵B(f),得白化后的信号为

则对于每一个频率f,时间序列的分量都是相互独立的。为了解决排序和幅值不确定问题,需要利用每个频道内独立分量来拆解频谱,即下式
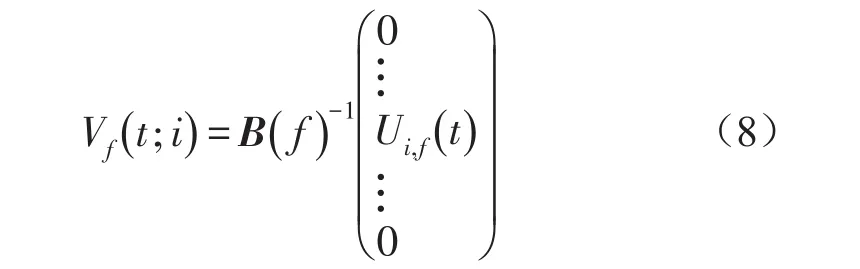
其中i代表了f频率下频谱对Uf(t)的第i个独立分量的依存关系。该步骤解决了各个频段在各个源信号中的标记问题[11]。不过该步骤也导致了恢复源信号时个数变为n2个。
(3)利用相邻频带的包络相关进行重列[12]:
对于排序不确定性问题,采用包络相关的方法。定义一种运算规则

其中M为正常数,且上式存在以下性质
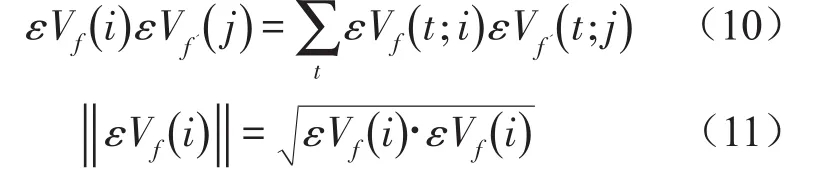
通过对各个频率排序来弱化频率f中独立分量的相关性,如下式
(4)源信号还原过程:
第一步:给第i个源信号在第一个频率值下进行赋值,
第二步:对于其他频率,则需找到排列σ(i)使fk和f1到fk-1的聚合包络之间的相关性最小,即对观测信号顺序进行排列组合,使得:最大,并在频率fk下给第i个源信号赋值

第三步:对得到的第i个时频域源信号Y(t,f;i)进行短时傅里叶逆变换得到时域源信号
2 仿真实例
为了验证算法的有效性,本文采用Matlab自带的超高斯语音信号chirp.mat和高斯信号sin(100πt)作为源信号输入,采样点1024,由于仿真源信号个数和观测信号个数相同,卷积混合矩阵(3)可以简化为对角线为1的矩阵,滤波器系数采用文献[10]中的数据,即

a21=[0.1241 0.4901 0.0801-0.2537-0.2939],得到原信号和混合信号如图2所示。

图2 源信号与混合信号
为了验证本文所提算法的分离效果,采取了两种方式进行评价。
(1)直接观察分离信号的波形。此种方法可以直观、形象地显示分离后的效果,如图3所示。其中分离出的两个语音信号分别记为1a,1b,分离的两个正弦信号记为2a,2b。结果显示本文算法能较成功的分离出了两个源信号;
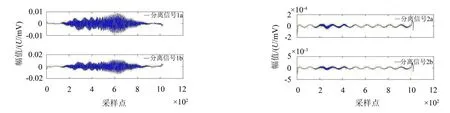
图3 分离信号
(2)建立评价函数。采用分离信号和源信号的二次残差(VQM)作为分离的指标,VQM值越小表示分离效果越好[13]。其计算公式为

通过计算二次残差系数,均有一个信号系数值很小,表示分离效果较好,结果如表1所示。

表1 源信号与分离信号之间的二次残差系数
3 故障诊断实例
3.1 转子故障模拟实
常见的转子故障有偏心、不对中、碰磨、松动等,其对应故障特征如表2所示。本文使用转子实验台及其实验测量系统对转子系统的故障进行模拟。转子实验台的轴承支承方式为1-3-0四点支承方案,代表压气机转子及涡轮转子分别由两个支点支承,二转子之间采用刚性联轴器连接,传递扭矩。测量传感器采用非接触式电涡流位移传感器测量轴的横向和径向位移,采用压电式加速度传感器测量轴承座的振动,采用光电传感器测量转速、提供键相信号。通过实验测量,该方案下转子系统的临界转速为3 000 r/min左右,为了获得更加明显的振动信号,采取转速3 000 r/min,采样频率5 000 Hz进行随机采样,数据采用工作良好的3、5、6通道,分别对应信号1、2、3。具体实验步骤如下:
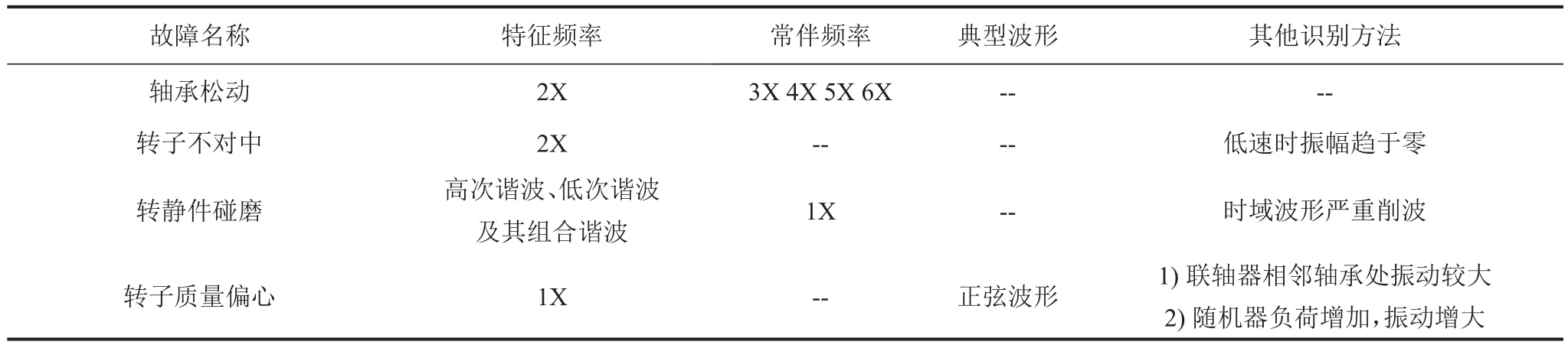
表2:典型故障特征及分析方法
1)试验台在安装过程中不可避免地会产生一些故障,因而首先调试试验台,尽量减少其他故障的影响;
2)在1)的基础上给转子集中添加质量块,直接造成明显的偏心故障,此时标记为状态1;
3)在2)的基础上拧紧碰磨杆,获得偏心-严重碰磨耦合故障信号,此时标记为状态2。
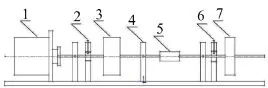
图4 1-3-0安装结构及测点位置
3.2 频域盲解卷转子振动故障诊断
3.2.1 偏心为主耦合故障诊断
在实际机械振动故障诊断领域,由于无法获取单一故障的源信号,因而对于故障要通过频域分析进行验证[14]。首先,对状态1下的观测信号进行FFT(快速傅里叶变换)处理,对照典型故障特征初步进行诊断。其次,对盲解卷之后的分离信号进行FFT处理,进一步进行诊断。
根据上述步骤,对偏心为主耦合故障进行诊断,三路信号时域波形记为(a)、快速傅里叶变换之后的频谱图记为(b)、分离信号记为(c),对分离信号进行FFT处理结果记为(d)。
图5(a)表示偏心为主耦合故障波形图。图(b)结果显示三路观测信号均为1X突出,伴随2X、3X、4X、5X。其中信号三2X突出,判断为严重偏心情况下造成了联轴器不对中。综上可知,此转子试验台在偏心故障为主的情况下产生了松动和不对中的故障(从图中无法判断有偏心故障)。
由于不同故障除偏心信号之外没有特定的时域波形图,因而图(c)仅可以观测出分离出了偏心信号,其他信号从波形无法判别种类。图(d)的FFT结果显示分离出三类源信号。第一种分离信号1X突出,2X、3X、4X、5X、6X、7X共存,判断为强烈偏心下造成试验台的共振和松动。第二种典型偏心信号(1X突出,不含其他频率成分)。第三种1X突出,伴随2X。由于其幅值较小,判断为转子轻微不对中的故障(2X幅值越大不对中越严重)。
3.2.2 偏心—碰磨为主耦合故障诊断
对偏心碰磨故障采取连续采样,波形如图6(a),可见在40 000至75 000个采样点之间发生了碰磨。取碰磨最严重时的8 192个采样点进行计算,频谱图记为(b),分离信号记为(c),分离信号的频谱图记为(d)。
严重碰磨的故障信号波形如图6(a)所示,波形畸变严重,存在非线性现象。图(b)显示三路观测信号1X突出,伴随2X、3X、4X、5X,每个主频周边存在大量的次谐波,碰磨特征明显,但除碰磨故障外无法判别是否有其他故障。
由于严重碰磨故障的影响,想从(c)图时域波形中判断故障种类是一件很困难的事。图(d)的频域分析则可以反映分析信号的特性。每个信号主频周围都存在大量的次谐波分量,主频存在较大差异。第一种信号1X突出,2X幅值较大,判断为不对中故障,第二种信号2X幅值超过1X,并伴随3X,说明此时试验台不对中振动已经加剧,之后容易出现失稳现象[15—17]。第三种信号1X幅值最大,倍频幅值很小,可以认定为偏心信号。综上述,状态2下分离出了严重不对中与偏心信号,从次谐波分析可得碰磨故障。从分离波形来看,在严重碰磨的情况下,转子系统已经进入非线性振动状态,卷积混合虽然在一定程度上满足该状态的实际情况,然而在理论角度,为了提高碰磨故障的诊断精度,应该采用非线性盲分离的方法。
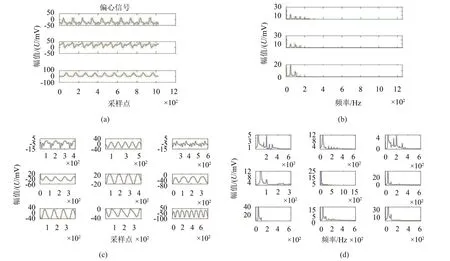
图5 状态1观测信号、FFT、源信号及FFT
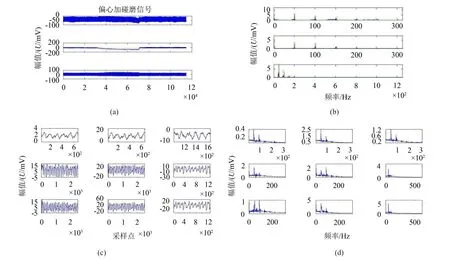
图6 状态2观测信号、FFT、分离信号及FFT
4 结 语
(1)通过混合信号和分离信号时域和频域的对比可以明显看出,频域盲解卷可以提高故障诊断的精度;
(2)卷积混合模型适合于实际机械系统,不过存在局限性,对于畸变严重的故障分离效果较差,还有待进一步研究;
(3)本文采用的算法理论上可以对任意数量的观测信号进行分解,但是由于算法的缺陷会得到n2个源信号,对源信号的种类判别带来一定的困难。但通过对时域、频域和先验知识的综合推断可以判别出源信号的种类;
(4)严重碰磨故障时,直接导致偏心和不对中故障的畸变,造成整机振动突然加大并表征出强烈的非线性现象。本文的算法一定程度上可以对其进行诊断,然而理论上来说,要想更精确地诊断该现象还有待非线性盲源分离算法的进一步发展。
[1]艾延廷,付祺,田晶,等.基于融合信息熵距的转子裂纹—碰磨耦合故障诊断方法[J].航空动力学报,2013,28 (10):2161-2165.
[2]马建仓,牛奕龙,陈海洋.盲信号处理[M].北京:国防工业出版社,2006:1-2.
[3]Gelle G,Colas M.Blind source separation:A tool for rotating machine monitoring by vibration analysis[J].Journal of Sound and Vibration,2001,248(5):865-885.
[4]Capdevielle V,Servière Ch,Lacoume J L.Blind separation of wide band sources in the frequency domain[C]//Proceeding of ICASSP’94,Adelaid,Australia,1994.
[5]李舜酩.机械振动信号盲源分离的时域方法[J].应用力学学报,2005,22(4):579-584.
[6]刘婷婷,杨兴民,杨永峰,等.盲解卷积的机械振动信号分离技术[J].振动、测试与诊断,2009,29(4):419-423.
[7]周勃,陈长征,张宇.基于非线性盲提取的柴油机振动诊断研究[J].噪声与振动控制,2008,43(04):43-46.
[8]Smaragdis P.Blind separation of convolved mixtures in the frequency domain[J].Neurcomputing,1998,22(1): 21-34.
[9]徐舜,刘郁林,陈绍荣.一种非平稳卷积混合信号的时域盲源分离算法[J].电子与信息学报,2008,30(3):589-592.
[10]叶红仙,杨世锡,杨将新.多振源卷积混合的时域盲源分离算法[J].机械工程报,2009,45(1):189-199.
[11]Makino S,Sawada H.Mukal R,and Araki S,Blind source separation of convolutive mixtures of speech in frequency domain[J].IEICE Trans.Fundamentals,2005,E88-A(7):1640-1655.
[12]N Murata,S Ikeda,and A Ziehe,An approach to blind source separation based on temporal structure of speech signals,IEEE Trans.Signal Processing.
[13]李舜酩.振动信号的盲原分离技术及应用[M].北京:航空工业出版社,2011:41-42.
[14]王金福,李富才.机械故障诊断的信号处理方法:频域分析[J].噪声与振动控制,2013,(01):173-180.
[15]胡茑庆.转子碰磨非线性行为与故障辨识的研究[D].长沙:国防科技大学出版社,2004:37-41.
[16]韩清凯,于晓光.基于振动分析的现代机械故障诊断原理及其应用[M].北京:科学出版社,2010:88-93.
[17]韩清凯,于涛,王德友,等.故障转子系统的非线性振动分析与诊断方法[M].北京:科学出版社,2010:37-39.
Rotor-system Fault-diagnosis Method Based on Hybrid Convolution and Blind De-convolution in Frequency domain
WEI Xiang1,LI Ben-wei1,ZHAO Yong1, SONG Han-qiang1,YANG Xiao-dong2
(1.Graduate Students Brigade,NavalAeronautical andAstronautical University, Yantai 264001,Shandong China; 2.No.92925 Unit,NavalAviationAcademy,Changzhi 046000,Shanxi China)
Aiming at the eccentricity,misalignment and rubbing faults in rotor system,a vibration fault diagnosis method based on multi-signal hybrid convolution and blind de-convolution(BD)was proposed.The rotor test bench was used to simulate the faults such as eccentricity and eccentricity-rubbing coupling.Then,the fault signals were separated through BD method in frequency-domain,and the separated fault signals were diagnosed by using FFT.Therefore,the precise localization and diagnosis of the complex coupling faults in the rotor system was realized.The simulation experiments verified the effectiveness of the algorithm.The separated waveforms and secondary residuals show that the algorithm can separate the mixed signals effectively.The results of the rotor system fault diagnosis show that this method can diagnose the faults of eccentricity,rubbing,misalignment and bearing looseness,and improve the accuracy of fault diagnosis.
vibration and wave;fault diagnosis;blind de-convolution in frequency-domain;rotor eccentricity;misalinment
TB53;TH165+.3;V231.92;
:A
:10.3969/j.issn.1006-1335.2015.01.045
1006-1355(2015)01-0219-06
2014-05-06
韦祥(1990-),男,山西原平人,硕士生,主要研究方向:航空发动机故障诊断。
李本威,男,博士生导师。E-mail:278250654@qq.com
猜你喜欢
测控技术(2018年11期)2018-12-07 05:49:02
雷达学报(2018年3期)2018-07-18 02:41:34
快乐语文(2018年7期)2018-05-25 02:32:15
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
火控雷达技术(2016年1期)2016-02-06 02:17:55
西北工业大学学报(2015年4期)2016-01-19 03:31:55
无线电通信技术(2015年3期)2015-12-23 11:37:02
小说月刊(2015年9期)2015-04-23 08:48:23
电测与仪表(2015年3期)2015-04-09 11:37:24
电测与仪表(2015年2期)2015-04-09 11:28:50
