压电驱动撞针式高黏性胶体微喷系统的研制
2015-12-27 02:09:11刘亚欣赵亚涛路士州姚玉峰
西安交通大学学报 2015年6期
刘亚欣,赵亚涛,路士州,姚玉峰
(1.哈尔滨工业大学机器人技术与系统国家重点实验室,150001,哈尔滨;2.西安交通大学机械制造系统工程国家重点实验室,710049,西安)
压电驱动撞针式高黏性胶体微喷系统的研制
刘亚欣1,2,赵亚涛1,路士州1,姚玉峰1
(1.哈尔滨工业大学机器人技术与系统国家重点实验室,150001,哈尔滨;2.西安交通大学机械制造系统工程国家重点实验室,710049,西安)
针对高黏性胶体材料要求快速、精确、灵活分配的需求,以及气压驱动撞针式喷射技术分配效率低、液滴操控能力有限的问题,设计了一种压电驱动撞针式高黏性微喷系统。该系统将压电致动器与传统撞针式喷射阀相结合,并利用菱形放大机构对压电致动器位移进行放大后带动撞针振动,以此对微量高黏性胶体的高速、精确分配进行操作。采用有限元法对菱形放大机构进行静、动态特性分析,通过构建位移输出单元的动力学模型分析撞针位移输出情况,确定了机械本体的结构参数,搭建了包含阀体、气路、驱动和监测单元的微喷系统实验平台,开发了基于模糊PID控制的胶体预分配方案。实验结果表明:撞针振幅能够达到有利于喷射的0.5 mm范围,胶滴体积随喷射频率和胶体黏度的增大而减小,分配重复精度和准确度分别可控制在4%和±6%以内,进一步揭示了高黏性胶体材料的非接触式分配机理,验证了压电驱动撞针式喷射方案的可行性。
高黏性;撞针式;压电致动器;菱形放大机构;模糊PID
胶体分配是微电子封装领域中的一项关键技术[1-2]。尤其近几年来,随着微电子技术的快速发展,各类芯片尺寸越来越小,引脚密度越来越大,封装所用胶体黏度越来越高,这就要求胶体分配技术能够更快、更准、更微量地分配黏度范围更宽的各种胶体材料[1,3]。
目前胶体分配技术主要包括接触式和非接触式两种类型[4-5]。接触式分配技术操作简单、控制灵活、驱动力大,但需要点胶头与基板接触,工作效率低,点胶一致性差,且容易引起胶体交叉污染[6],而非接触式分配技术不需要喷嘴与基板接触,具有分配速度快、精度高、对物理空间要求低的特点[4]。目前利用撞针撞击胶体形成喷射的非接触式分配方法[7]得到了广泛的应用,该方法多利用脉冲式高压空气驱动撞针往复运动,驱动力大,分配胶体黏度高,但存在撞针行程无法在线调节、气压波动大、分配效率低的问题[8]。
针对高黏性胶体材料要求快速、精确、灵活分配的需求,以及气压驱动撞针式喷射技术分配效率低、液滴操控能力有限的问题,本文提出了一种压电驱动撞针式喷射方案。该方案充分利用压电致动器输出位移调节方便、振动频率高的特点来提高系统分配效率、精度和灵活性[8-10]。
本文开发了压电驱动撞针式喷射阀,对其构成及工作原理进行研究。利用有限元分析方法对放大机构进行静、动态特性分析,建立位移输出单元的动力学模型,并在Matlab软件中对撞针位移输出情况进行分析。最后,搭建系统实验平台,通过实验对该微喷阀的喷射性能进行了验证。
1 喷射阀的结构及工作原理
如图1所示,压电驱动撞针式喷射阀主要由压电致动器、菱形放大机构、撞针、阀体、喷嘴和储液筒等构成。压电致动器嵌于菱形放大机构内部,其输出位移经菱形放大机构放大后转化为撞针竖向振幅;储液筒内的胶体经上部高压空气驱动,不断挤入阀体通道内。
压电驱动撞针式喷射阀的工作过程如下:初始时刻,胶体充满阀体通道,撞针上部受压紧靠在喷嘴底部并封住喷嘴出口;压电致动器被施以高电平,压电致动器横向伸长,撞针向上抬起,此时喷嘴打开,外部气压驱动胶液填充撞针上移所形成的阀体空隙,并使一定量的胶液流出喷嘴;压电致动器被施以低电平,压电致动器和菱形放大机构收缩,同时在弹簧回复力的作用下,撞针向下高速撞击喷嘴内胶体并封住喷口,被挤在喷嘴内的胶体在惯性力作用下喷射出去,形成胶滴;在驱动信号高低电平交替作用下,撞针不断上下往复振动,从而实现高速喷射点胶。通过改变驱动电压幅值、频率、占空比等可对撞针振幅、频率进行调节,进而实现对胶滴喷射性能的控制[11-12]。
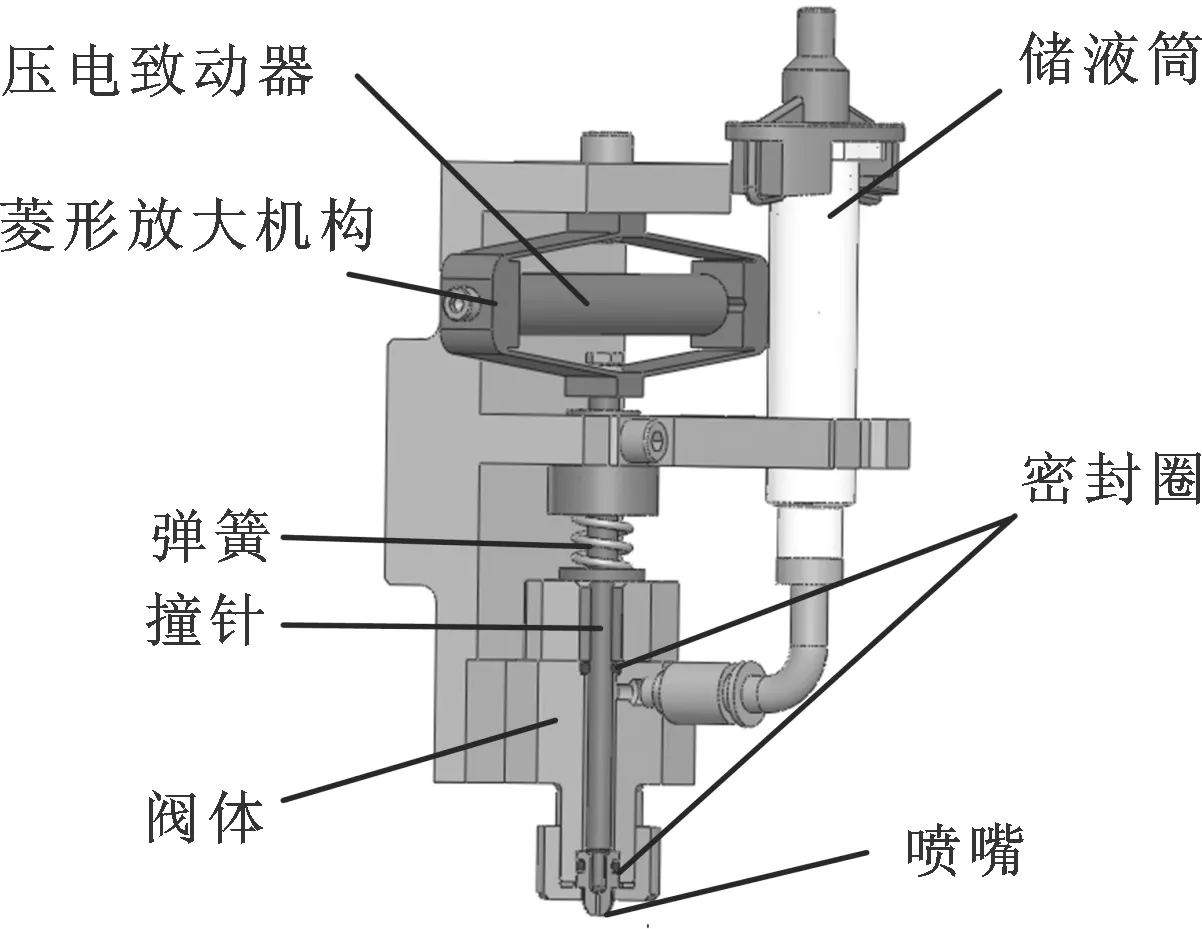
图1 压电喷射阀的构成
2 微喷阀结构设计与仿真
Nguyen等的研究结果表明,撞针振幅在0.3~0.5 mm时,可以实现稳定的液滴喷射过程[13-14]。由图1可知,本喷射阀利用菱形放大机构对压电致动器位移进行放大后再带动撞针运动。因此,本文在分析菱形放大机构输出能力的基础上,进一步研究喷射阀中撞针的位移输出情况。
2.1 放大机构的设计与仿真分析
工作中,放大机构的位移放大倍数、固有频率、应力分布等对喷射阀的性能影响很大。本节利用有限元分析方法对上述因素进行分析,进而指导菱形放大机构的设计。
本文所用菱形放大机构模型及相应的位移放大原理如图2所示。图2a中T为侧面厚度,θ为倾斜角,t为壁厚,A为内部上下面间距,B为宽度,L为内部左右面间距;图2b中a、b分别为放大前菱形水平方向和竖直方向对角线长的一半,c为菱形边长,ta、tb分别为放大前后菱形水平方向和竖直方向长度的变化量。
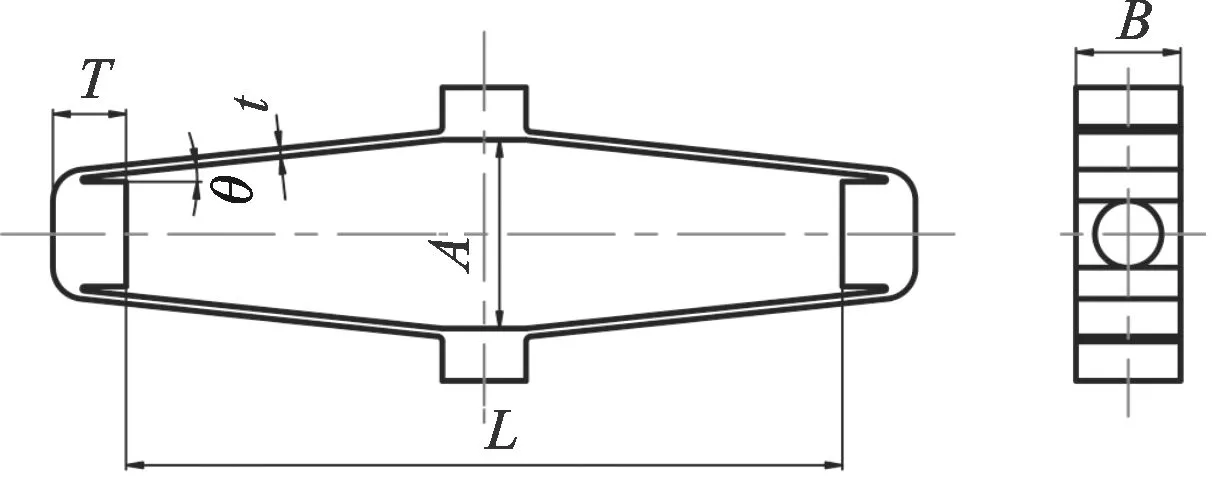
(a)菱形放大机构模型

(b)位移放大原理图2 菱形放大机构的模型及位移放大原理
由图2b可见
a2+b2=(a+ta)2+(b-tb)2
(1)
对上式进行整理可得该放大机构的理论放大倍数为
β=2tb/2ta≈a/b=1/tanθ
(2)
考虑到压电致动器输出位移一般仅为微米级别,本文在保证放大机构固有频率、应力分布等特征满足要求的情况下,尽量选用较大的位移放大倍数。该放大机构相关参数取值为T=8.25 mm,t=0.6 mm,B=10 mm,θ=6°。这样,由式(2)可知理论放大倍数为9.5倍。
本文所用菱形放大机构采用60Si2Mn弹簧钢,相应的弹性模量为206 GPa,密度为7 850 kg/m3,泊松比为0.3,屈服应力为1 200 MPa。对放大机构进行有限元分析,保持上端面固定,下端面为位移输出面,其内部水平方向施加等值反向位移为25 μm。
仿真结果如图3所示。由图3a可见,放大机构下端面的输出位移为460 μm,放大比为9.2倍,与理论值9.5接近。由图3b可见,放大机构所受到的最大应力为94.3 MPa,远小于其屈服应力1 200 MPa,满足强度要求。由图3c可见,放大机构的第一阶振动模态为底端沿竖直方向的上下运动,这是胶体喷射过程中的理想状态。同时,该放大机构的一阶固有频率为821.168 Hz,远远大于实验中所用的激励电压频率,可有效避免共振。
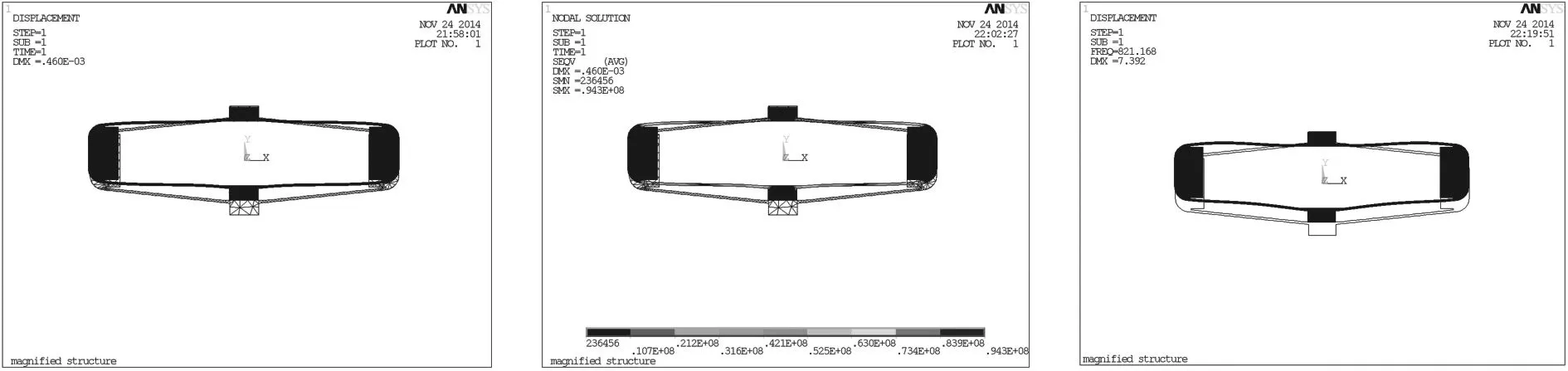
(a)位移变化图 (b)应力云图 (c)一阶模态图图3 菱形放大机构有限元仿真结果
2.2 喷射阀动力学仿真分析
如图4所示,压电驱动撞针式喷射阀的位移输出单元包括压电致动器、菱形放大机构、撞针和弹簧4部分。
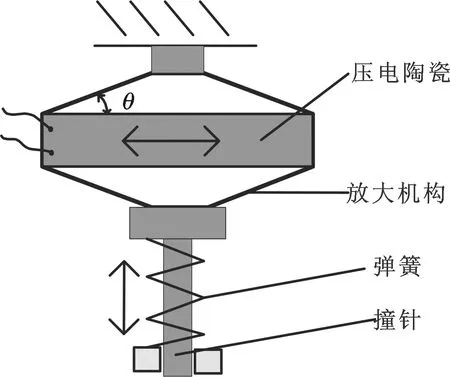
图4 位移输出单元构成示意图
位移输出单元的动力学模型为
(3)
(4)
放大机构对位移和力的转换关系为
(5)
在式(3)~(5)中:mep为压电陶瓷等效质量,本文采用PZ公司的PST150/5/60型号压电致动器,则mep=6×10-3kg;xp为压电陶瓷的输出位移,单位为m;压电陶瓷的阻尼系数bp为1.5 N·s·m-1;压电陶瓷的刚度系数kp为8×106N·m-1;单位电压下压电陶瓷的自由位移xp0为4×10-5m·V-1;V为压电陶瓷的激励电压,单位为V;Fp为压电陶瓷的输出力,单位为N;撞针的质量mn为2.6×10-3kg;撞针的阻尼系数bn为6 N·s·m-1;xn为撞针的输出位移,单位为m;弹簧的刚度系数Ks为1.25×104N·m-1;Fn为放大机构对撞针的作用力,单位为N;Fs0为弹簧的预压力,单位为N。
联立式(3)~(5)建立位移输出单元的Matlab仿真模型,输入峰值为150 V、频率为100 Hz的方波电压信号V,仿真得到压电陶瓷和撞针的位移如图5所示。

(a)撞针输出位移

(b)压电陶瓷输出位移图5 压电陶瓷和撞针位移与时间的关系
由图5可见,压电陶瓷和撞针的输出位移之间约有10倍的放大关系,且放大后撞针振幅能够达到0.5 mm,满足喷射条件中对撞针位移的要求。
3 微喷系统与实验研究
3.1 微喷系统构成
如图6所示,搭建的微喷系统实验平台主要由阀体、气路、驱动、监测单元构成。在上位机控制下,信号板发出驱动压电致动器的电压信号和调节电气比例阀输出压力的控制信号;撞针输出位移经测微仪实时监测并传送给上位机进行处理;喷射的胶滴经电子天平称量后依据密度转换为体积。
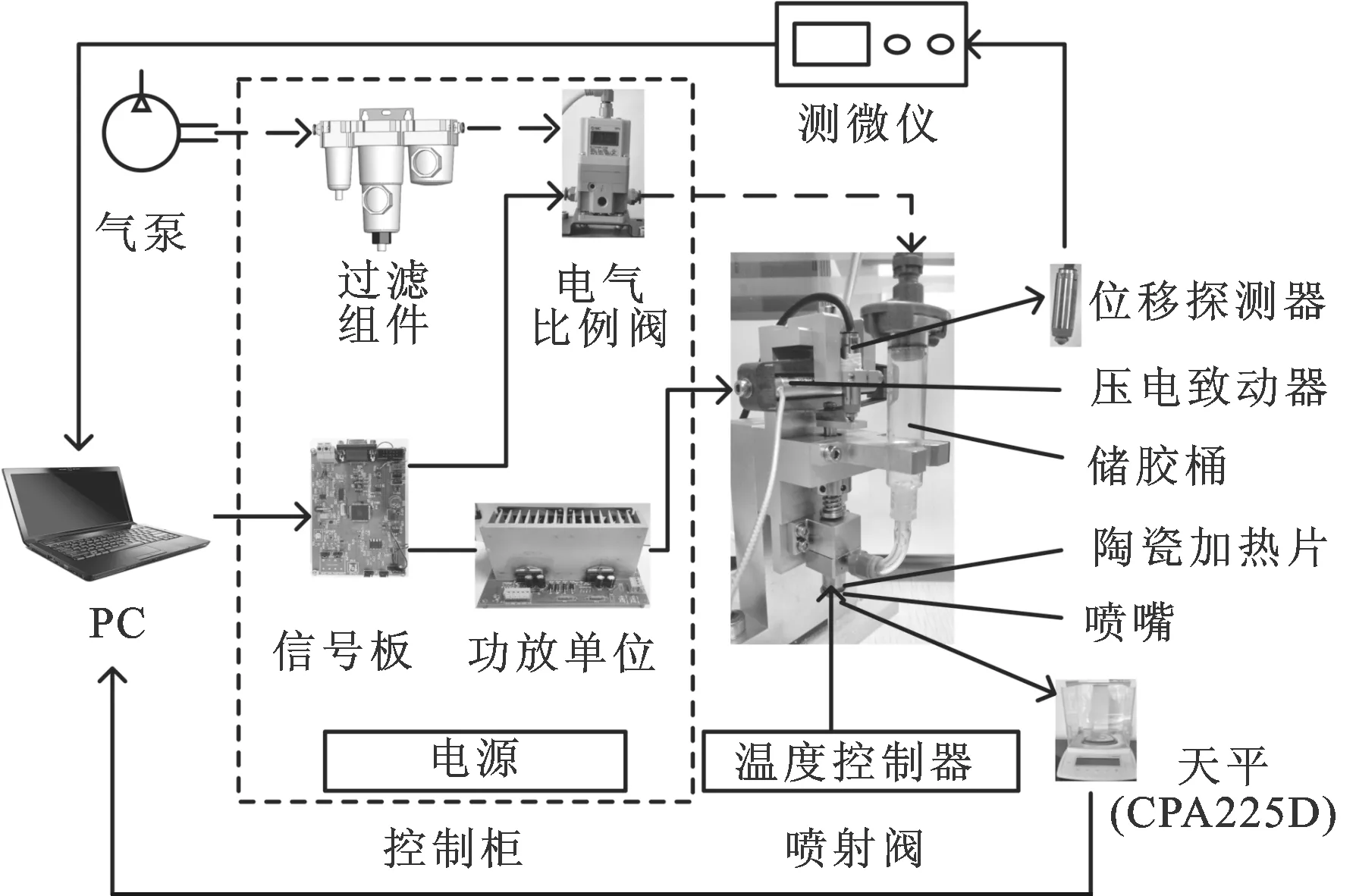
图6 压电微喷系统实验平台
3.2 微喷实验研究
喷射胶滴体积及准确度是衡量微喷系统喷射性能的重要指标,撞针输出位移及胶体黏度对喷射过程有很大的影响。为了验证压电驱动撞针式微喷系统的胶体分配能力,本文基于图6所示平台,从撞针输出位移、喷射频率及胶体黏度对胶滴大小和胶滴分配精度的影响等方面开展实验研究。
3.2.1 撞针输出位移 在峰值为150 V、周期为0.1 s的方波电压信号以及0.25 MPa的气压驱动下分配黏度为5 Pa·s的胶体,测得撞针输出位移如图7所示。
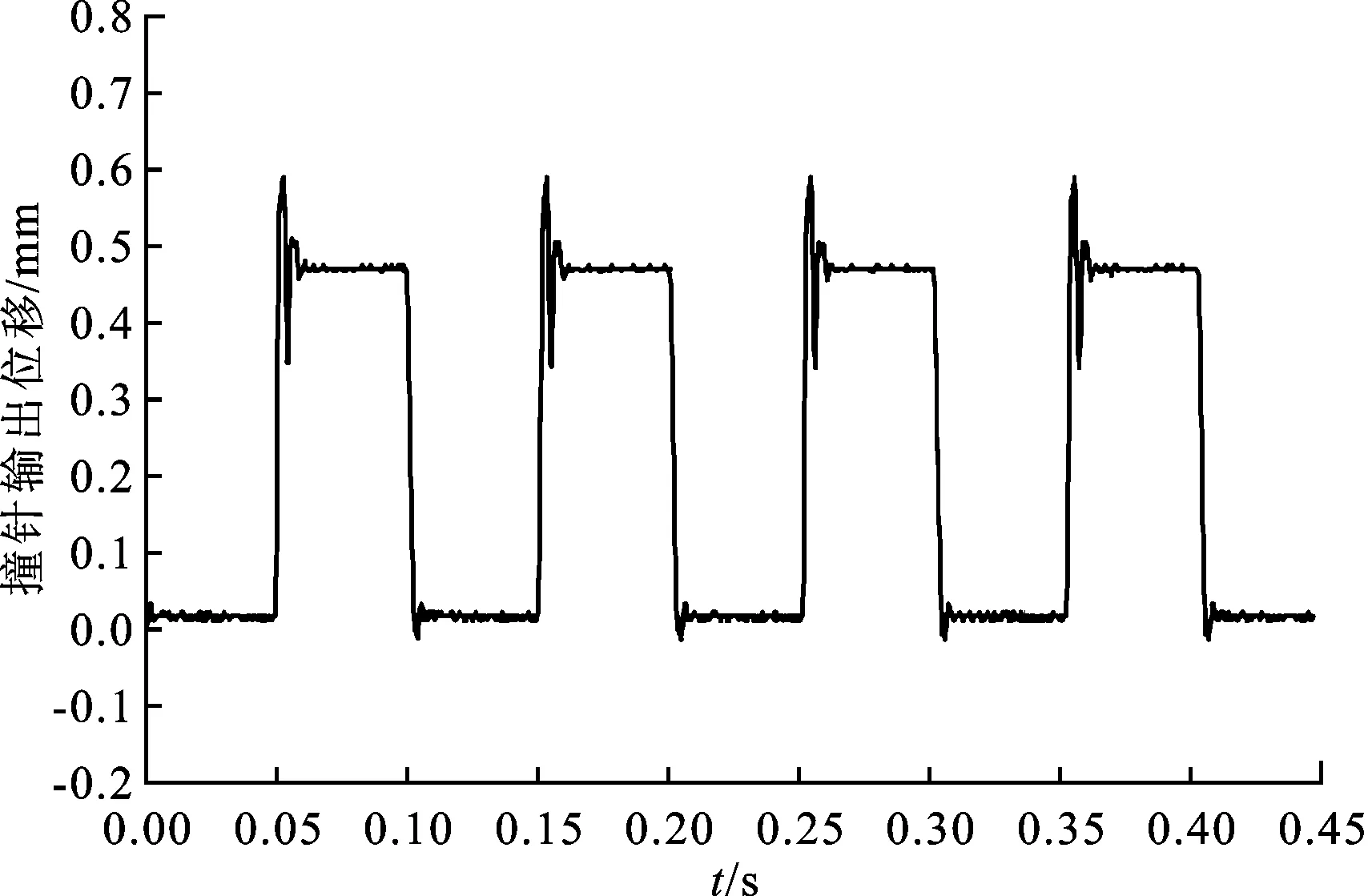
图7 撞针输出位移实时监测
由图7可见,撞针振幅可达0.5 mm,满足喷射过程对撞针振幅的要求。此外,在信号加载初期,位移波动较大,信号衰减后,撞针仍保持略大于0的位移量,这主要由压电致动器和放大机构的迟滞性造成。
3.2.2 喷射频率对胶滴体积的影响 在峰值为150 V的方波电压和0.25 MPa的驱动气压及不同频率下分配黏度为5 Pa·s的胶体。图8所示为胶滴体积随喷射频率的变化曲线。
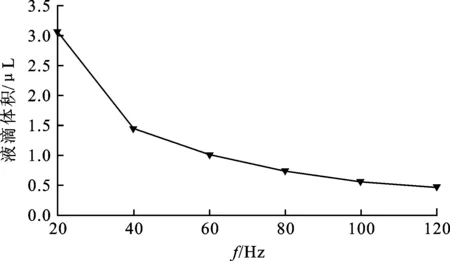
图8 胶滴体积随频率的变化
由图8可见,胶滴体积随喷射频率的升高呈减小趋势,这在频率较低时表现更为明显。当频率为120 Hz时所得胶滴体积为0.46 μL,这使得在实验中通过调节频率可以实现对分配体积的控制。
3.2.3 胶体黏度对胶滴体积的影响 在幅值为120 V、频率为40 Hz的方波电压信号以及0.3 MPa的驱动气压下针对不同黏度的胶体进行喷射实验。喷射胶滴体积与胶体黏度之间的关系曲线如图9所示。
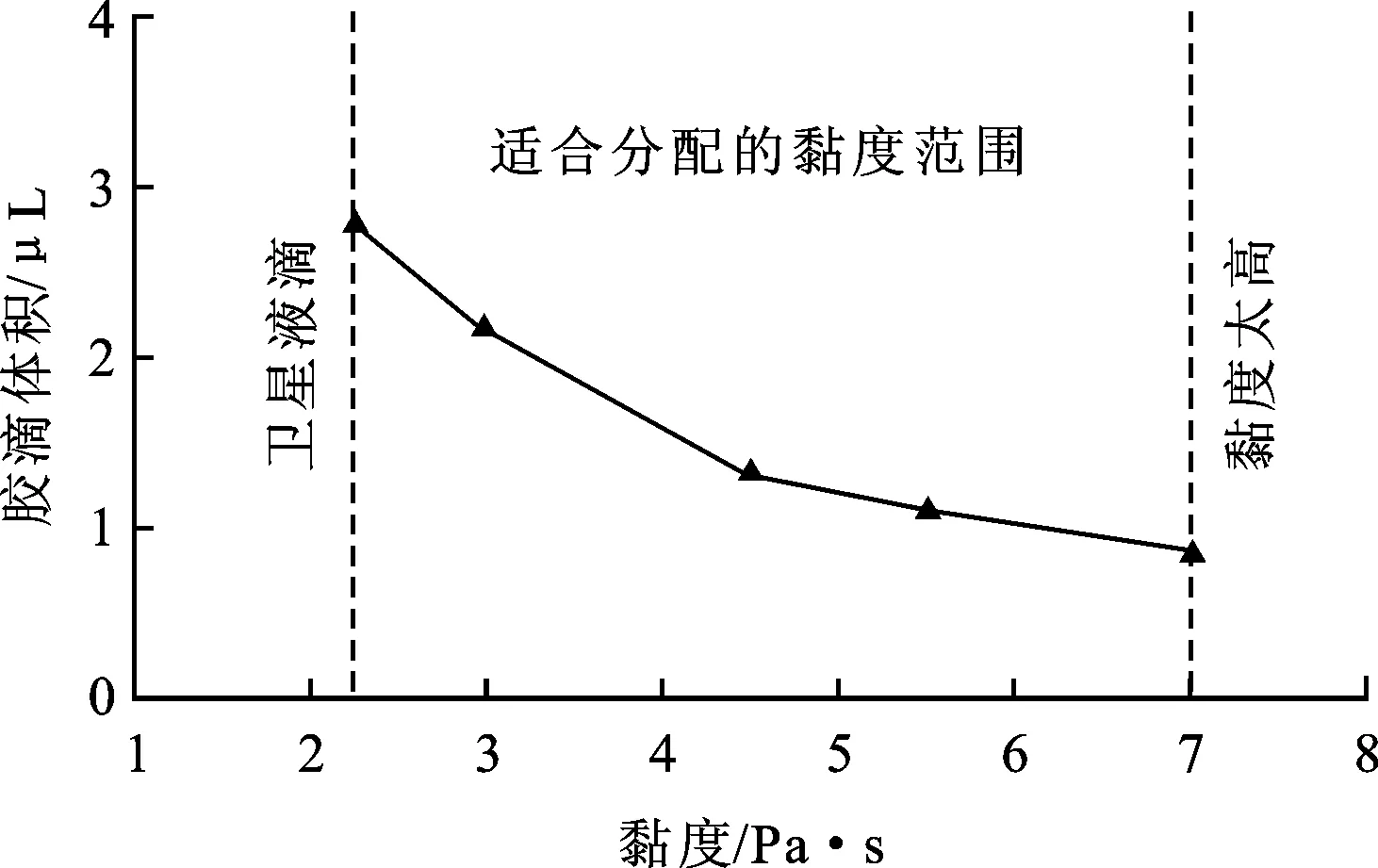
图9 胶滴体积与黏度之间的关系
在相同控制参数下,胶滴体积随黏度的增大而减小。当黏度低于2.2 Pa·s时,喷出胶体易被打散为大量卫星液滴。当胶体黏度大于7 Pa·s时,从喷嘴内流出的胶体难以被切断而黏附在喷嘴端部,此时需要通过提高系统驱动力来完成喷射。可见,当操控条件不变时,胶体黏度需要保持在一定范围内才能实现喷射。
3.2.4 分配精度测试 为了快速、灵活地分配具有不同黏度和期望体积的胶体材料,本文开发了模糊自适应PID控制方案,该方案通过比较实际分配体积与期望体积的差值来实时调控各轮分配中撞针打开喷嘴的时间,以此实现对分配体积的精度控制。图10显示了基于开环手动调节和模糊自适应PID控制来分配5 Pa·s黏度的胶体,并期望获取1.5 μL胶滴时的实验结果。表1给出了基于模糊自适应PID控制方案来分配不同黏度胶体时前30轮分配实验的数据处理结果。
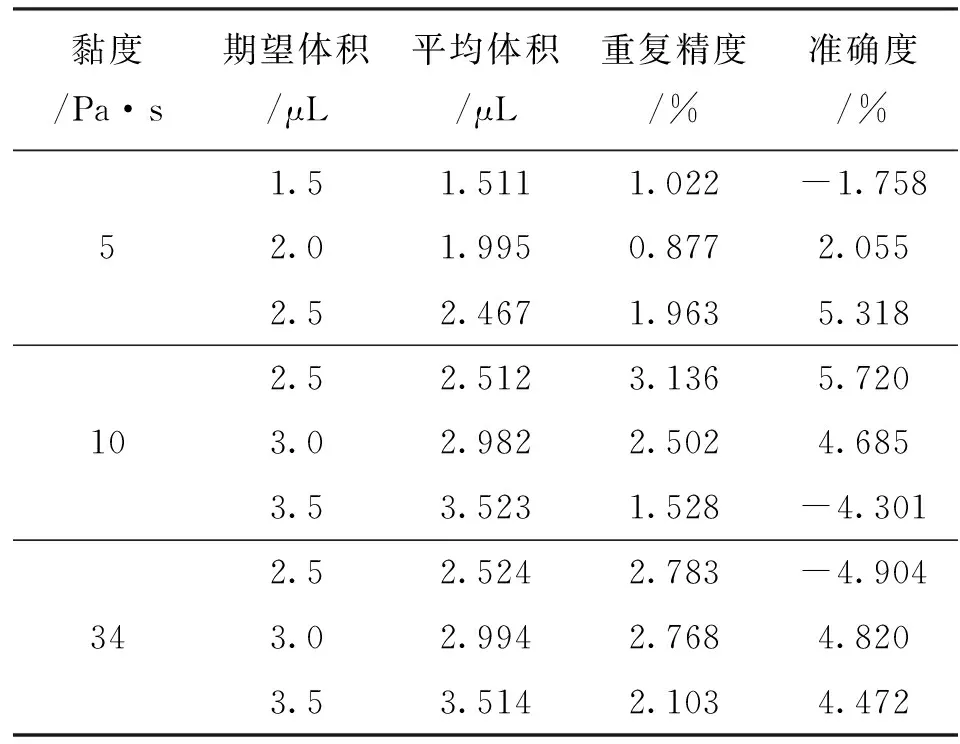
表1 不同黏度胶体对应不同体积的分配结果
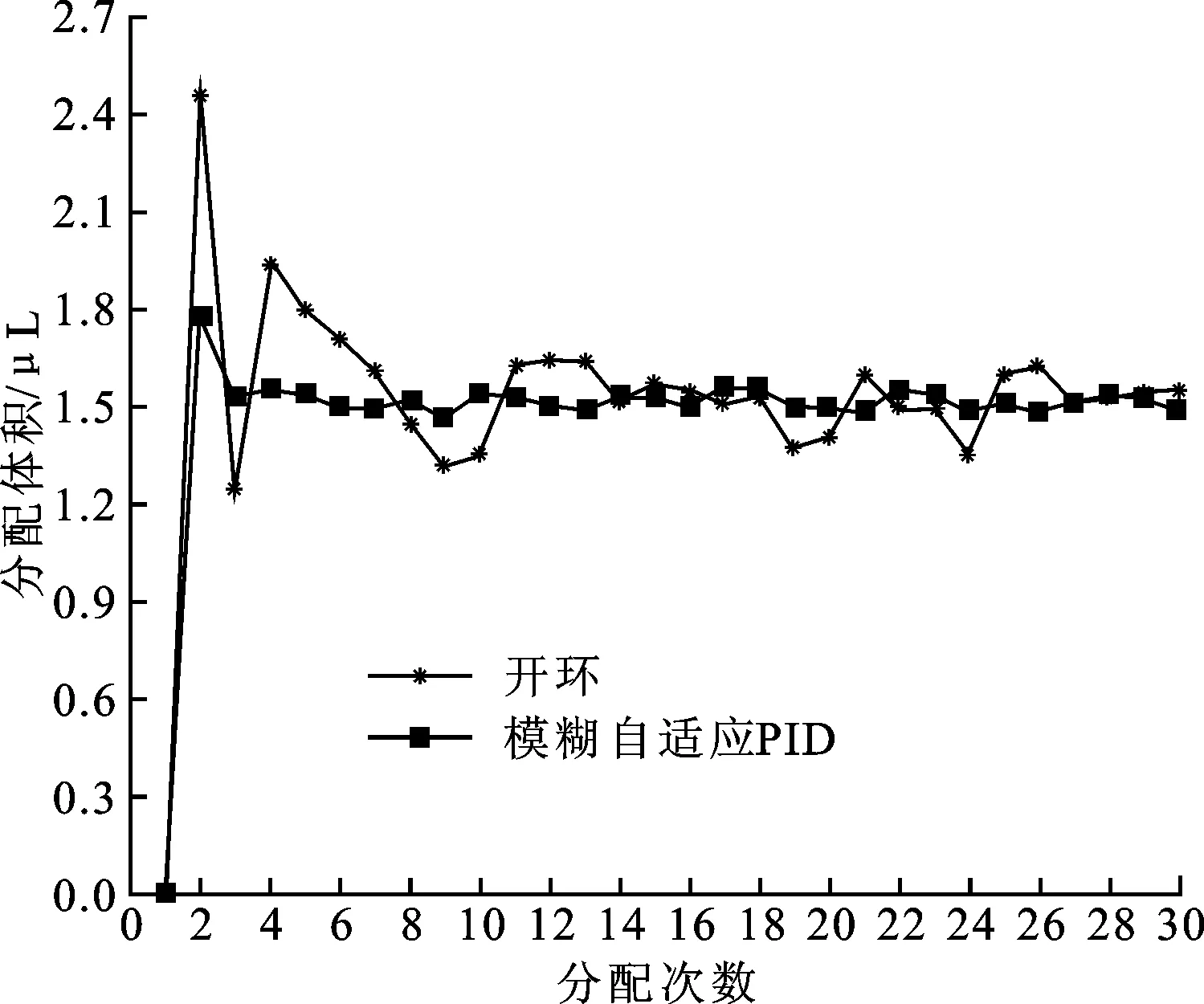
图10 开环和模糊自适应PID控制效果对比
由图10可见,模糊自适应PID控制方案能够在3次预分配操作中寻找到适合期望体积的系统控制参数,在多轮分配中,体积波动很小,分配精度显著提高。实验中开环控制胶滴平均体积为1.568 μL,重复精度为14.265%;模糊自适应PID控制所得胶滴平均体积为1.521 μL,重复精度为3.794%。由表1可见,基于模糊自适应PID控制方案,微喷系统在分配不同黏度和期望体积的胶体材料时,分配重复精度和准确度可分别控制在4%和±6%以内。
4 结 论
本文提出了一种压电驱动撞针式微量高黏性液体喷射方案。该方案将压电致动器与撞针式微喷方式相结合,利用菱形放大机构放大位移进而带动撞针往复振动,开发了喷射阀,搭建了包含阀体、气路、驱动和监测单元的微喷实验系统。通过对放大机构和位移输出单元进行动力学仿真分析,确定了阀体结构参数,验证了胶滴喷射可行性。利用搭建的微喷系统实验平台进行实验研究。实验表明:撞针振幅能够达到有利于喷射的0.3~0.5 mm范围内,胶滴体积随喷射频率和胶体黏度的增大而减小,基于模糊自适应PID控制方案,系统分配重复精度和准确度可分别控制在4%和±6%以内。
[1]路士州, 刘亚欣, 姚玉峰, 等.压电驱动撞针式微喷系统的键合图建模 [J].西安交通大学学报, 2014, 48(1): 133-138.
LU Shizhou, LIU Yaxin, YAO Yufeng, et al.Bond-graph modeling of needle typed jet dispensing system driven by piezoelectric actuator [J].Journal of Xi’an Jiaotong University, 2014, 48(1): 133-138.
[2]姚玉峰, 路士州, 刘亚欣, 等.微量液体自动分配技术研究综述 [J].机械工程学报, 2013, 49(14): 140-153.
YAO Yufeng, LU Shizhou, LIU Yaxin, et al.Research on automated micro-liquid dispensing technology [J].Journal of Mechanical Engineering, 2013, 49(14): 140-153.
[3]BERGKVIST J, LILLIEHORN T, NILSSON J, et al.Miniaturized flowthrough microdispenser with piezoceramic tripod actuation [J].Journal of Microelectro-Mechanical Systems, 2005, 14(1): 134-140.
[4]NGUYEN Q H, CHOI M K, CHOI S B.A new type of piezostack-driven jetting dispenser for semiconductor electronic packaging: modeling and control [J].Smart Materials and Structures, 2008, 17(1): 015033.
[5]YAO Yufeng, LU Shizhou, LIU Yaxin.Simulation and experiment research of non-contact micro-liquid reagent dispensing [J].Advance Journal of Food Science and Technology, 2013, 5(5): 514-521.
[6]LI Jianping, DENG Guiling.Technology development and basic theory study of fluid dispensing: a review [C]∥Proceedings of the 6th IEEE CPMT Conference on High Density Microsystem Design and Packaging and Component Failure Analysis.Piscataway, NJ, USA: IEEE, 2004: 198-205.
[7]LU Shizhou, LIU Yaxin, YAO Yufeng, et al.Bond-graph model of a piezostack driven jetting dispenser [J].Simulation Modelling Practice and Theory, 2014, 49: 193-202.
[8]刘亚欣, 黄博, 路士州, 等.一种基于压电驱动的喷射式点胶装置: 中国, 201310114298.4 [P].2013-06-19.
[9]谷峰春.压电驱动喷射式点胶机的研究 [D].吉林: 吉林大学, 2012.
[10]LU Shizhou, LIU Yaxin, YAO Yufeng, et al.Design and analysis of a piezostack driven jetting dispenser for high viscosity adhesives [C]∥Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics.Piscataway, NJ, USA: IEEE, 2014: 227-232.
[11]孙慧.高粘性微量液滴非接触式分配技术研究[D].哈尔滨: 哈尔滨工业大学, 2011.
[12]焦晓阳, 刘建芳, 谷峰春, 等.压电喷射点胶阀的喷射性能分析及实验研究 [J].四川大学学报:工程科学版, 2013, 45(2): 193-198.
JIAO Xiaoyang, LIU Jianfang, GU Fengchun, et al.Analysis and research on jetting ability of the jet dispensing valve driven by a piezostack [J].Journal of Sichuan University: Engineering Science Edition, 2013, 45(2): 193-198.
[13]WANG Lingyun, DU Jiang, LUO Zhiwei, et al.Design and experiment of a jetting dispenser driven by piezostack actuator [J].IEEE Transactions on Components, Packaging and Manufacturing Technology, 2013, 3(1): 147-156.
[14]NGUYEN Q H, HAN Y M, CHOI S B, et al.Design of a new mechanism for jetting dispenser featuring piezoactuator [J].Proceedings of the Institution of Mechanical Engineers: Part C Journal of Mechanical Engineering Science, 2008, 222(4): 711-722.
[本刊相关文献链接]
郭涛,李国君.内嵌晃荡液体减振的流固耦合分析.2014,48(9):117-122.[doi:10.7652/xjtuxb201409020]
施东晓,毕勤成,周荣启.磁性液体两相界面演变特性的数值研究.2014,48(9):123-129.[doi:10.7652/xjtuxb201409021]
邓知森,马玉婷,冯志华.脉动离心隔膜压电泵的原理与试验.2014,48(8):98-103.[doi:10.7652/xjtuxb201408017]
俞珏,庄健,于德弘.采用李雅普诺夫函数的电液伺服系统反馈线性化控制.2014,48(7):71-76.[doi:10.7652/xjtuxb 201407013]
马驰骋,张希农,罗亚军,等.变质量矩形贮箱流固耦合系统动力学特性分析.2014,48(7):109-116.[doi:10.7652/xjtuxb201407019]
赵志翔,厉彦忠,王磊,等.微弱漏气对液氢管道插拔式法兰漏热的影响.2014,48(5):37-42.[doi:10.7652/xjtuxb2014 05007]
张春林,张希农,陈杰,等.菱形微位移压电作动器的输入输出线性建模.2014,48(5):102-106.[doi:10.7652/xjtuxb 201405018]
苏波,韩向科.用于三维非均质流场计算的改进流线迎风Petrov-Galerkin(SUPG)方法.2014,48(3):128-134.[doi:10.7652/xjtuxb201403023]
周生喜,曹军义,Alper ERTURK,等.压电磁耦合振动能量俘获系统的非线性模型研究.2014,48(1):106-111.[doi:10.7652/xjtuxb201401018]
路士州,刘亚欣,姚玉峰,等.压电驱动撞针式微喷系统的键合图建模.2014,48(1):133-138.[doi:10.7652/xjtuxb2014 01023]
曾平,孙淑杰,李立安,等.双向旋转非对称惯性压电驱动器理论与试验研究.2013,47(12):90-94.[doi:10.7652/xjtuxb 201312016]
孙中国,李帝辰,陈啸,等.采用移动粒子半隐式法的进口流动速度边界模型.2013,47(11):87-91.[doi:10.7652/xjtuxb 201311016]
王宏金,孟庆丰.压电振动能量收集器的等效电路建模分析与实验验证.2013,47(10):75-80.[doi:10.7652/xjtuxb2013 10013]
吴越,杨志刚,刘勇,等.压电振子对压电泵极限输出压力的影响.2013,47(4):64-72.[doi:10.7652/xjtuxb201304013]
(编辑 武红江)
Research on Needle-Type Micro Jet Dispensing Systems Driven by Piezoelectric Actuator for High Viscous Liquids
LIU Yaxin1,2, ZHAO Yatao1, LU Shizhou1, YAO Yufeng1
(1.State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, China; 2.State Key Laboratory for Manufacturing System Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
A kind of needle-type micro jet dispensing systems driven by piezoelectric actuator for high viscous liquids is proposed to dispense high viscous materials speedily, accurately and flexibly, and to solve the problem that needle-type jet dispensing technology driven by pressure has low efficiency and limited ability to control droplets.The system combines the piezoelectric actuator and the traditional needle-type jet valve, and utilizes a diamond displacement amplification mechanism to magnify the displacement of the piezoelectric actuator and to vibrate the needle so that the droplets are driven to squirt from the nozzle.The finite element analysis method is used to analyze the structure and the dynamic performance of the amplification mechanism.The output displacement of the needle is analyzed by building a dynamic mathematical model of the displacement output module.The structural parameters of the mechanical structure are obtained through these analyses.An experimental platform consisting of jet valve, pneumatic module, driving module and monitoring module is built, and a pre-distribution scheme based on fuzzy PID is developed.Experimental results show that the needle amplitude reaches 0.5 mm which is very suitable for dispensing.Smaller droplets are obtained as jet frequency and fluid viscosity increase, and the dispensing repeat-precision and accuracy of the droplets can be controlled below 4% and within ±6%, respectively.These results reveal the non-contact dispensing mechanism of high viscous materials, and verify the feasibility of the needle-type jet dispensing system driven by piezoelectric actuator.
high viscous; needle-type; piezoelectric actuator; diamond amplification mechanism; fuzzy PID
2014-12-15。 作者简介:刘亚欣(1981—),女,副教授。 基金项目:国家高技术研究发展计划资助项目(2012AA040504);国家自然科学基金资助项目(61203359);西安交通大学机械制造系统工程国家重点实验室资助项目(2011004);机器人技术与系统国家重点实验室开放基金资助项目(SKLRS-2012-ZD-05)。
时间:2015-03-23
http:∥www.cnki.net/kcms/detail/61.1069.T.20150323.1713.003.html
10.7652/xjtuxb201506015
TP24;TP6
A
0253-987X(2015)06-0090-06
猜你喜欢
石油沥青(2022年2期)2022-05-23 13:02:36
成都信息工程大学学报(2021年3期)2021-11-22 07:17:28
中学生数理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
科技风(2018年31期)2018-07-09 12:46:38
光学精密工程(2016年6期)2016-11-07 09:07:41
光学精密工程(2016年5期)2016-11-07 09:06:31
中国卫生标准管理(2015年14期)2015-01-27 02:24:27
河北工业大学学报(2014年2期)2014-09-17 00:55:12
西南医科大学学报(2014年6期)2014-03-20 15:43:50
意林(2008年12期)2008-05-14 16:48:28