
一种高度二阶可导的机载巡飞弹大空域降高弹道设计方法*
2015-12-26 05:45车晓涛李海城孙虎元
弹箭与制导学报 2015年3期
车晓涛,王 萧,郝 峰,李海城,孙虎元
(1 中国兵器工业第203研究所,西安 710065;2 解放军边防学院,西安 710108)
一种高度二阶可导的机载巡飞弹大空域降高弹道设计方法*
车晓涛1,王萧1,郝峰1,李海城1,孙虎元2
(1中国兵器工业第203研究所,西安710065;2解放军边防学院,西安710108)
摘要:机载巡飞弹在大空域降高弹道起点和终点会出现弹体抖动和过渡时间过长的现象。文中分析了高度连续和速度连续的两类降高方案弹道产生这种现象的物理原因,从弹道优化设计的角度提出了一种垂向加速度连续的降高弹道设计方法。该方法可在不改变控制系统复杂度的情况下,实现降高弹道的平稳快速过渡,并减小降高段末端的高度冲出量。弹道仿真结果表明,该方法改进效果明显,可以为机载巡飞弹及其他类似弹药的弹道设计提供参考。
关键词:机载巡飞弹;大空域降高;方案弹道;弹道优化
0引言
机载巡飞弹是一种新型空对地精确打击武器。它一般由载机从10~20 km的高空投放,经过无动力降高/滑翔进入目标区域,随后在目标区域上方200~500 m高度进行有动力的“巡弋飞行”,执行侦察和精确打击任务[1]。为了保证巡飞弹在降高段末端能够快速稳定的转入巡飞侦察段,对其大空域降高弹道的设计显得尤为重要。
目前国内外在降高方案弹道设计方面一般采用指数形式的高度连续方案或三角函数形式的速度连续方案,在降高段的起点和终点保证高度、垂向速度的连续[2-7]。这些方案由于降高段与前后两段弹道切换点处的垂向加速度不连续,控制系统为了响应垂向加速度的跳变,产生跳变的需用舵控指令,最终导致降高弹道起点和终点巡飞弹的姿态、攻角等产生振动,过渡时间变长,并且在降高段终点,高度冲出量大大增加。这些问题虽然可以通过增加俯仰阻尼、角速度阻尼或对控制指令进行平滑处理等措施得到部分改善,但是增加了控制系统复杂度,并且没有从本质上消除产生弹体振动和高度冲出量的原因。
针对以上问题,文中从弹道优化设计的角度提出了一种垂向加速度连续的降高弹道设计方法,对现有降高方案弹道进行改进,保证了机载巡飞弹所受合力垂向分量的平滑过渡,从物理本质上消除了弹体振动和高度冲出量产生的原因。
1一般降高方案弹道的分析
文中研究过程中设定巡飞弹开始处于高空平飞弹道,高度H0=10 000 m,速度268 m/s,低空巡飞高度H1=500 m;从t0=150 s开始降高,t1=230 s时转入低空巡飞弹道,降高过程持续80 s。
一般降高方案弹道采用指数形式的高度连续或三角函数形式的速度连续方案,在降高段的起点和终点保证高度、速度的连续。将其归纳为以下两类分别进行分析。
1.1 高度连续(零阶可导)的降高方案
指数形式的降高方案使弹道衔接点处高度连续,飞行高度按规划的指数函数值变化,但高度的一阶和二阶导数即垂向速度和垂向加速度不连续,表达式如下:
(1)
式中:t0、t1为设定的降高段起点和终点时间;A、B、k为计算所得控制参数[2,7]。
针对上文规定的巡飞弹飞行状态,求得满足式(1)的参数如下:k=0.028 23,A=10 000,B=-602.3。
从图1~图3可以看出,上述指数形式弹道的高度连续,但在t0时刻垂向速度和加速度都很大并且持续较长时间,其中vn0≈-300 m/s,an0≈8.49 m/s2。一般巡飞弹无法瞬间产生这么大的过载,导致控制系统无法跟踪所设计的弹道。因此,针对上述弹道存在的缺陷,文中设计了另一种形式的由两段指数函数组成的降高弹道,其表达式为:
(2)
式中变量意义同式(1)。求得一组参数为:A=10 417.6,B=-82.42,k=0.062 89。则高度、垂向速度、垂向加速度曲线如图1~图3所示。

图1 零阶方案高度曲线

图2 零阶方案垂向速度曲线
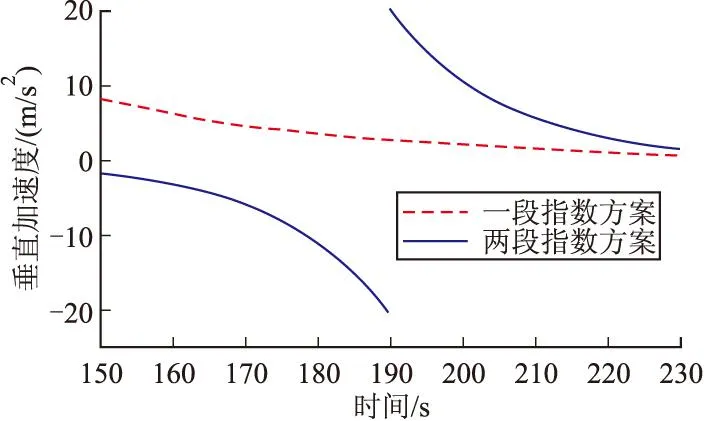
图3 零阶方案垂向加速度曲线
可以看出,相比一段指数函数形式的弹道,两段指数函数形式的弹道在t0、t1时刻的垂向速度、加速度均减小了很多,更易于控制系统的控制。
1.2 高度一阶可导的降高方案
高度一阶可导的三角函数降高方案使弹道衔接点处高度和垂向速度连续,但垂向加速度不连续。一般表达式为:
(3)
式中A、ω、φ、B为待求的方案弹道参数。可根据降高段起点和终点的高度H0、H1,速度vn0、vn1,令y(t0)=H0,y(t1)=H1,y′(t0)=vn0,y′(t1)=0,列出如下非线性方程组进行解算:
(4)
求解得到:A=-4 750.0,ω=0.039 27,φ=-1.571,B=5 250.0。则高度、垂向速度、垂向加速度曲线如图4~图6所示。

图4 一阶方案高度曲线
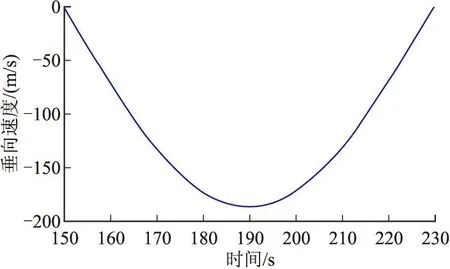
图5 一阶方案垂向速度曲线
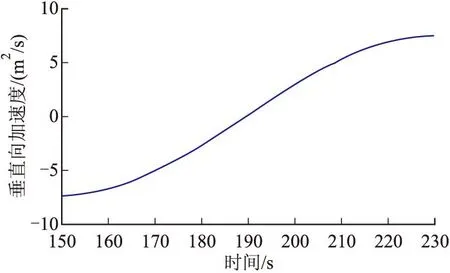
图6 一阶方案垂向加速度曲线
1.3 对一般降高方案存在不足的分析
高度的二阶导数为垂向加速度,根据牛顿第二定律:F=ma可知,垂向加速度与作用在弹体上的合力垂向分量成比例。而以上两类方案弹道在弹道衔接点处的垂向速度或垂向加速度存在跳变,控制系统为了响应其跳变,产生跳变的需用舵控指令,最终造成了弹道衔接点处巡飞弹姿态、攻角、弹道倾角等的振动,衔接点过渡时间变长,并且在降高段终点,高度冲出量增加。因此,为了保证弹道衔接点处的平稳过渡,除了使得方案弹道的高度连续,还应保证其垂向速度、垂向加速度的连续。下文的计算机仿真可以验证这个分析。
2改进的方案弹道设计方法
为了改进一般降高方案存在的不足,文中从弹道优化的角度提出了一种垂向加速度连续即高度二阶可导的降高方案弹道设计方法。该设计方法的核心在于通过参数设计使得t0和t1这两个弹道衔接点处的垂向加速度an连续,从而使得飞行状态平稳过渡,从物理本质上消除了弹体抖动的成因。
该设计方法的设计步骤如下:
1)列写拟采用降高方案的高度方案y=f0(t),对此表达式进行一次和二次求导得到垂向速度y′=f1(t)、垂向加速度y″=f2(t)的表达式。
2)分析y=f0(t),y′=f1(t),y″=f2(t)中包含的待求解参数x0,x1,…,xN,参数个数N应满足N≤6,否则,转至步骤1)重新设计。
3)确定降高段起点和终点的高度H0、H1,时间t0、t1,根据巡飞弹转入降高段时刻的弹道参数实时获得起点垂向速度vn0、垂向加速度an0,期望的终点vn1、an1(一般均为零)。
6)计算机仿真验证分析。
3高度二阶可导的降高方案
应用上面提出的降高方案弹道设计方法对三角函数形式的降高方案进行改进,得到一个文中设计方法的实例。使弹道衔接点处巡飞弹的高度、垂向速度和垂向加速度均连续,则高度、垂向速度、垂向加速度应满足:
(5)
式中A、ω、φ、B、C、D为待求的方案弹道参数。
要解出A、ω、φ、B、C、D六个量,可根据降高段起点和终点的高度H0、H1,垂向速度vn0、vn1,垂向加速度an0、an1,令y(t0)=H0,y(t1)=H1,y′(t0)=vn0,y′(t1)=0,y″(t0)=an0,y″(t1)=0,列出如下非线性方程组:
(6)
降高弹道起点垂向加速度一般小于等于零,且其绝对值小于降高过程中垂向加速度绝对值的最大值,由此得到约束条件,即参数取值范围为:
(7)

采用信赖域折线算法解得一组满足要求的参数:A=1 512.0,ω=-0.078 54,φ=3.141 6,B=-3.29 6e-17,C=-118.6,D=27 813。则方案弹道的高度、垂向速度、垂向加速度曲线如图7~图9所示。
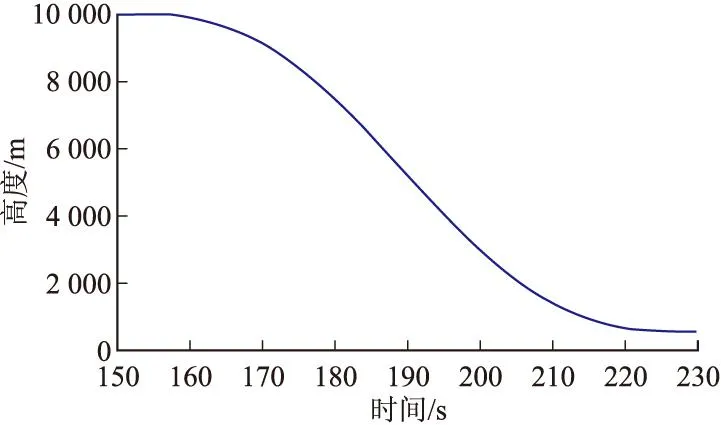
图7 二阶方案高度曲线
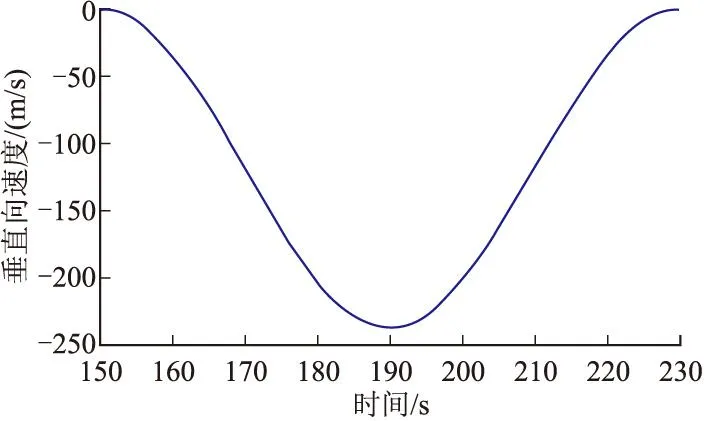
图8 二阶方案垂向速度曲线

图9 二阶方案垂向加速度曲线
4仿真分析
对于同一方案弹道,不同复杂度的控制模型会对结果有不同程度的影响。文中重点分析降高方案弹道的优劣,因此采用最简单的PID控制器对巡飞弹俯仰运动进行控制,对于文中涉及的所有方案均采用完全相同的控制参数和控制结构。控制模型为:
(8)
式中:δz为俯仰舵控制指令;Kp=0.8,Ki=0.45,Kd=0.15分别为PID控制器的比例、积分、微分系数;h(t)、hc(t)分别为t时刻巡飞弹的实际高度和方案弹道期望高度;v(t)、vc(t)为实际垂向速度和期望垂向速度。
控制系统框图如图10所示。

图10 文中控制系统框图
对上面提到的3种方案进行计算机仿真,得到如图11~图14的结果。

图11 高度随时间变化仿真结果
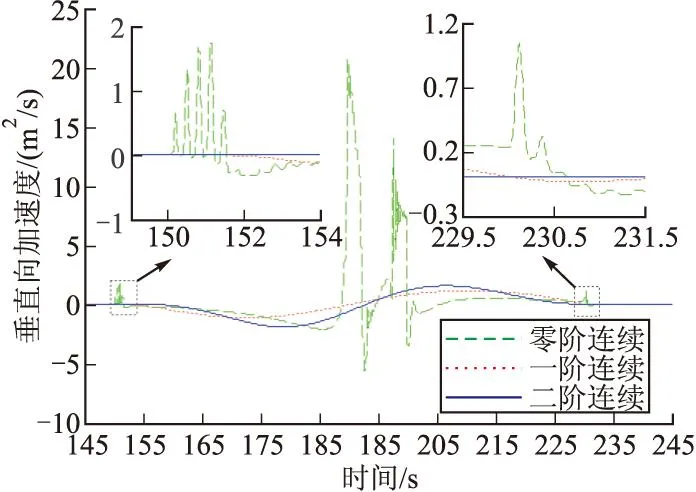
图12 垂向加速度随时间变化仿真结果
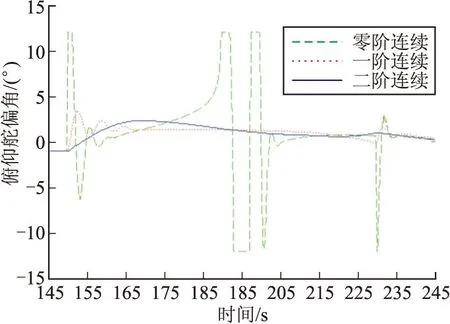
图13 俯仰舵偏角随时间变化仿真结果
从图11~图14可以明显看出,在降高段起点(t=150 s)和终点(t=230 s)附近,高度二阶导数连续的方案由于保证了垂向加速度平稳过渡,舵偏角和攻角都不会产生振动,高度冲出量也明显小于其他两种方案。
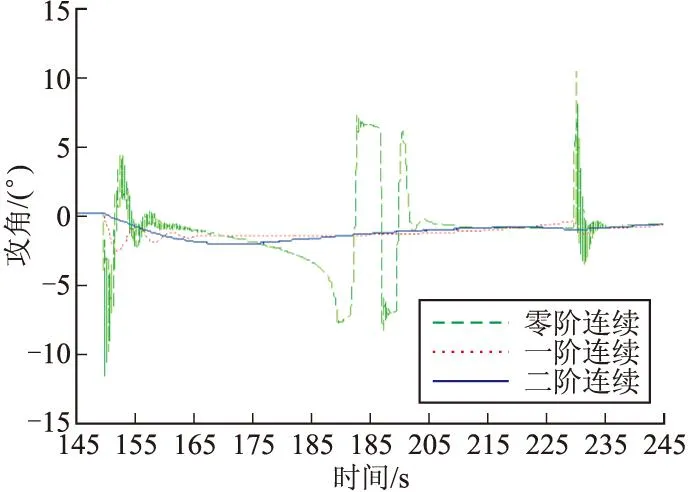
图14 攻角随时间变化仿真结果
目前工程中为了取得类似的效果,一般采取增加俯仰阻尼、角速度阻尼[9]或对控制指令进行平滑处理等措施,但这些措施无疑增加了控制系统的复杂度。
由以上分析得出如下结论:在完全相同的控制器作用下,高度导数可导的阶数越高,高度冲出量越小,垂向加速度、攻角过渡越平稳,舵的作动也越少。为了使巡飞弹飞行状态在弹道衔接点能够平稳过渡,降高方案弹道的设计应保证高度二阶导数(即垂向加速度)与前后两段弹道连续。
5结论
文中通过分析现有降高方案弹道导致机载巡飞弹在弹道衔接点处弹体产生抖动的原因,提出了一种改进的降高方案弹道设计方法,并使用该方法对正弦函数形式的降高弹道进行优化设计,在完全相同的仿真条件下对三种不同阶次可导的方案进行数学仿真。仿真结果表明:在不增加控制系统复杂度的情况下,本方法对现有方案改进效果明显,减小了降高弹道终点的高度冲出量,提高了机载巡飞弹飞行稳定性和生存能力。本设计方法同样可以用于巡航导弹、无人机等飞行轨迹中存在较大空域降高轨迹的飞行器。
参考文献:
[1]郭美芳, 彭翠枝. 巡飞弹: 一种巡弋待机的新型弹药 [J]. 现代军事, 2006(4): 49-52.
[2]慈旋, 周龙, 邵兵. 基于弹道仿真的空舰导弹降高位置研究 [J]. 大众科技, 2010(6): 68-69.
[3]王洪强, 邵晓巍, 杨黔龙, 等. 某型滑翔增程靶弹方案弹道设计 [J]. 现代防御技术, 2012, 40(2): 27-31.
[4]陈涛, 丁军辉. 当前导弹飞行力学研究中的问题分析 [J]. 黑龙江科技信息, 2008(10): 44.
[5]颜仲新, 刘鼎臣. 反舰导弹飞行弹道探讨 [J]. 飞航导弹, 2002(2): 33-36.
[6]李一龙, 王光辉, 吕超. 掠海飞行高度对反舰导弹突防能力的影响 [J]. 四川兵工学报, 2014, 35(1): 45-48.
[7]钱杏芳. 导弹飞行力学 [M]. 北京理工大学出版社, 2000: 86-87.
[8]张志涌. 精通MATLAB R2011a [M]. 北京: 北京航空航天大学出版社, 2013: 130-132.
[9]谷良贤, 温炳恒. 导弹总体设计原理 [M]. 西安: 西北工业大学出版社, 2004: 309-313.
收稿日期:2014-12-16
作者简介:车晓涛(1990-),男,陕西合阳人,硕士研究生,研究方向:巡飞弹总体技术,制导与控制技术等。
中图分类号:TJ765.1
文献标志码:A
A Project Trajectory with 2nd-derivative Being Continuous of
Large-space Height Descent for Airborne Loitering Munitions
CHE Xiaotao1,WANG Xiao1,HAO Feng1,LI Haicheng1,SUN Huyuan2
(1No.203 Research Institute of China Ordnance Industries, Xi’an 710065, China;
2Frontier Defence Academy of PLA, Xi’an 710108, China)
Abstract:At the beginning and ending points of large-space height descent trajectory, airborne loitering munitions will oscillate severely and the transition time lasts too long. By researching the height-continuous and the velocity-continuous project trajectory, the physical reasons of those phenomena were analyzed. A novel trajectory for height descent with vertical acceleration being continuous was designed based on trajectory optimization. This height descent project trajectory can realize smooth and quick transition between different trajectories without changing the control system, and it also reduces height overshooting of the loitering munitions. An example was given, validating the effect of this trajectory design method, and it will provide reference for trajectory design of airborne loitering munitions and other similar munitions.
Keywords:airborne loitering munitions; large-space height descent; project trajectory; trajectory optimization
